- Сложное движение точки и твердого тела. Изучить лекцию и написать конспект

Содержание
- 2. 1. Сложное движение точки Основные определения сложного движения точки. Понятие сложного движения. Определение ускорения точки. Кинематические
- 3. Вывод. Сложное движение (траектория КD) разлагается на два: 1.1. Основные определения сложного движения точки. Опр. Сложным
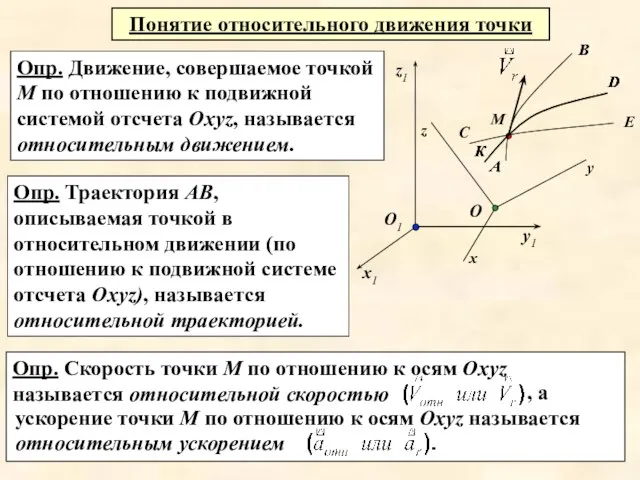
- 4. Опр. Движение, совершаемое точкой М по отношению к подвижной системой отсчета Охуz, называется относительным движением. Понятие
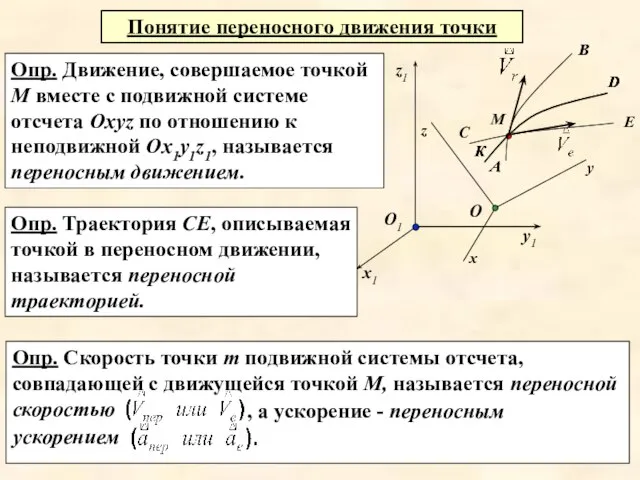
- 5. Опр. Скорость точки т подвижной системы отсчета, совпадающей с движущейся точкой М, называется переносной скоростью ,
- 6. Понятие абсолютного движения точки Опр. Движение, совершаемое точкой М по отношению к неподвижной системе отсчета Ох1у1z1,
- 7. Теорема. При сложном движении абсолютная скорость точки и переносной равна геометрической сумме относительной 1.2. Кинематические характеристики
- 8. – переносное ускорение, характеризующее изменение переносной скорости только при переносном движении; Теорема Кориолиса. При сложном движении
- 9. б) направление вектора - проводят плоскость, перпендикулярную вектору угловой скорости поворачивают в сторону вращения на угол
- 10. Определение модуля и направления абсолютного ускорения точки Модуль и направление абсолютного ускорения точки определяются по методу
- 11. ВАРИАНТЫ ОТВЕТОВ: В кривошипно-кулисном механизме кривошип OА = 10 см вращается с угловой скоростью ω =
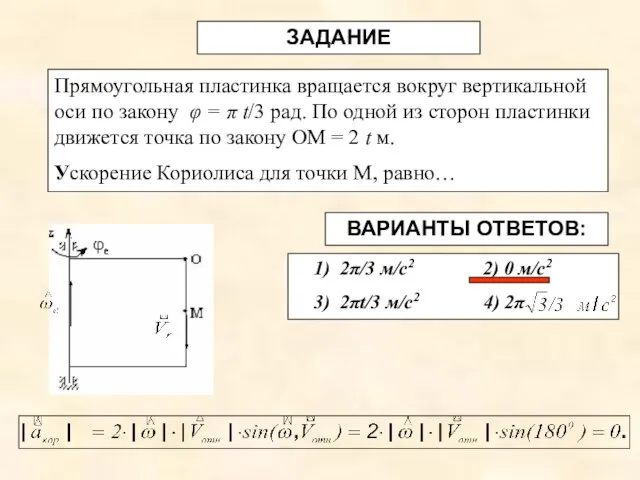
- 12. ЗАДАНИЕ Прямоугольная пластинка вращается вокруг вертикальной оси по закону φ = π t/3 рад. По одной
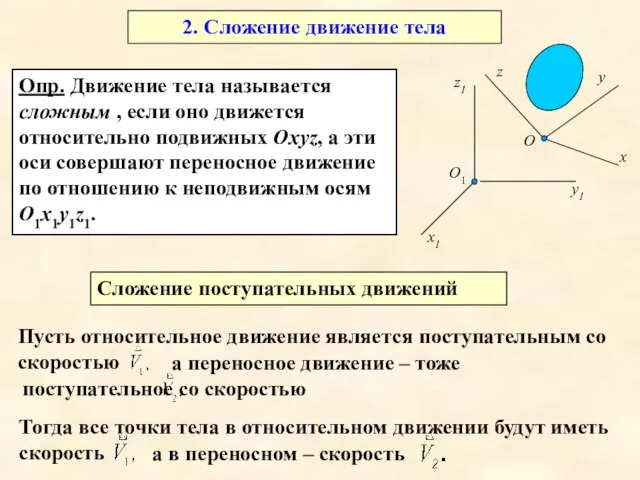
- 13. Тогда все точки тела в относительном движении будут иметь скорость а в переносном – скорость Пусть
- 14. Рассмотрим случай, когда относительное движение тела является вращением с угловой скоростью Вывод. При сложении двух поступательных
- 15. Рассмотрим сечение (S) ⊥ осям вращения аа/ и bb/. Точки А и В – следы от
- 16. Предположим, что ω1 >ω2. Мгновенная ось Сс/ вращения будет проходить через м.ц.с. – точку С, причем
- 17. Вывод. В случае пары вращения движение тела будет поступательным со скоростью численно равной ω1 · АВ
- 18. Пусть относительное движение тела представляет собой вращение с угловой скоростью вокруг оси а1а, укрепленной на кривошипе
- 19. Мгновенная ось Ос направлена вдоль вектора т. е. по диагонали параллелограмма, построенного на векторах Вывод. При
- 20. Пусть тело вращается с угловой скоростью и движется поступательно со скоростью Случай 1. Представим поступательное движение
- 22. Скачать презентацию

1. Сложное движение точки
Основные определения сложного движения точки.
Понятие сложного
1. Сложное движение точки
Основные определения сложного движения точки.
Понятие сложного
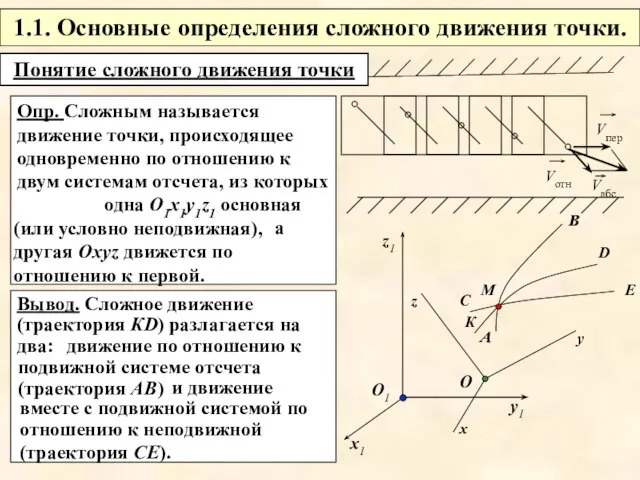
Вывод. Сложное движение (траектория КD) разлагается на два:
1.1. Основные определения сложного
Вывод. Сложное движение (траектория КD) разлагается на два:
1.1. Основные определения сложного
Опр. Движение, совершаемое точкой М по отношению к подвижной системой отсчета
Опр. Движение, совершаемое точкой М по отношению к подвижной системой отсчета
Опр. Скорость точки т подвижной системы отсчета, совпадающей с движущейся точкой
Опр. Скорость точки т подвижной системы отсчета, совпадающей с движущейся точкой

Понятие абсолютного движения точки
Опр. Движение, совершаемое точкой М по отношению
Понятие абсолютного движения точки
Опр. Движение, совершаемое точкой М по отношению

Теорема. При сложном движении абсолютная скорость точки
и переносной
равна геометрической сумме
Теорема. При сложном движении абсолютная скорость точки
и переносной
равна геометрической сумме
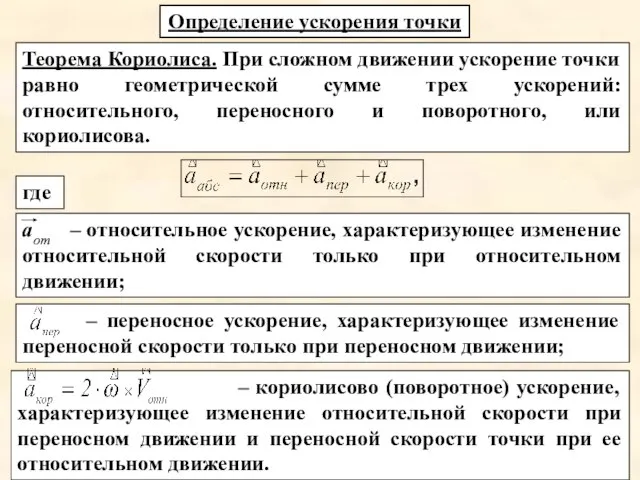
– переносное ускорение, характеризующее изменение переносной скорости только при переносном
– переносное ускорение, характеризующее изменение переносной скорости только при переносном
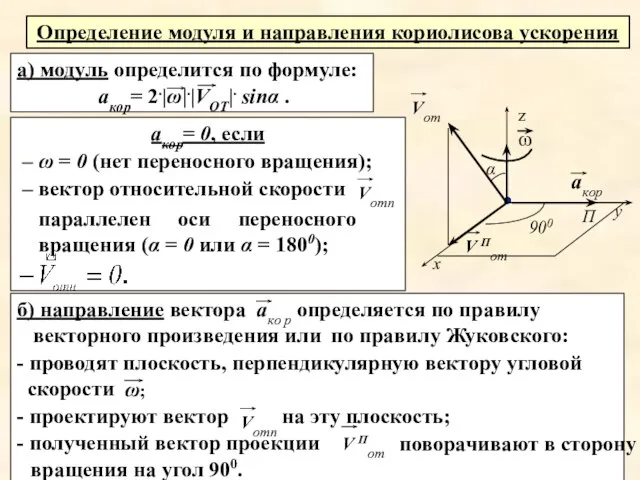
б) направление вектора
- проводят плоскость, перпендикулярную вектору угловой
скорости
поворачивают
б) направление вектора
- проводят плоскость, перпендикулярную вектору угловой
скорости
поворачивают
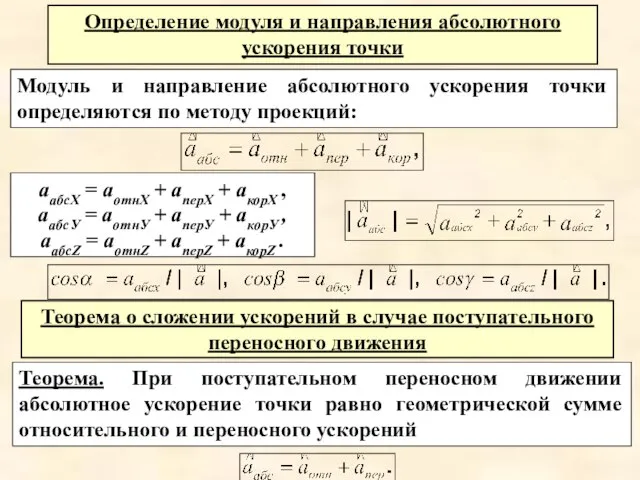
Определение модуля и направления абсолютного ускорения точки
Модуль и направление абсолютного ускорения
Определение модуля и направления абсолютного ускорения точки
Модуль и направление абсолютного ускорения
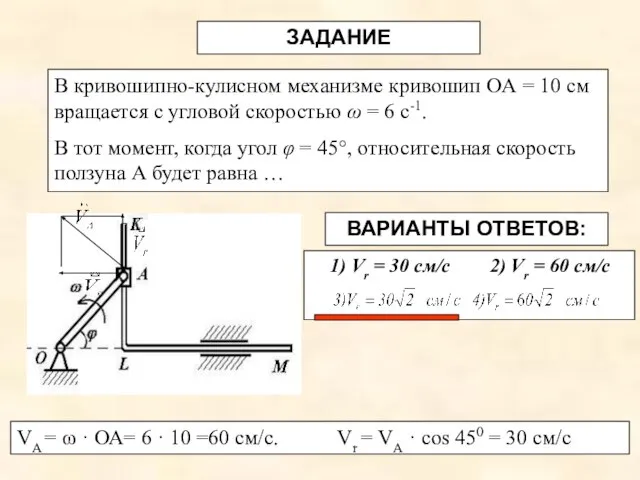
ВАРИАНТЫ ОТВЕТОВ:
В кривошипно-кулисном механизме кривошип OА = 10 см вращается с
ВАРИАНТЫ ОТВЕТОВ:
В кривошипно-кулисном механизме кривошип OА = 10 см вращается с
ЗАДАНИЕ
Прямоугольная пластинка вращается вокруг вертикальной оси по закону φ = π
ЗАДАНИЕ
Прямоугольная пластинка вращается вокруг вертикальной оси по закону φ = π
Тогда все точки тела в относительном движении будут иметь скорость
а
Тогда все точки тела в относительном движении будут иметь скорость
а
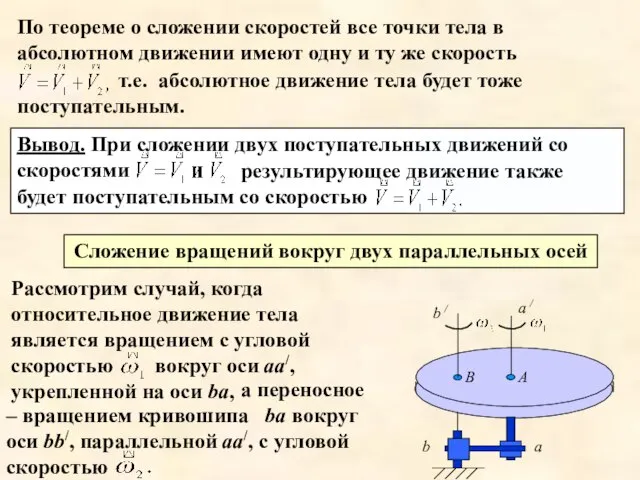
Рассмотрим случай, когда относительное движение тела является вращением с угловой скоростью
Вывод.
Рассмотрим случай, когда относительное движение тела является вращением с угловой скоростью
Вывод.
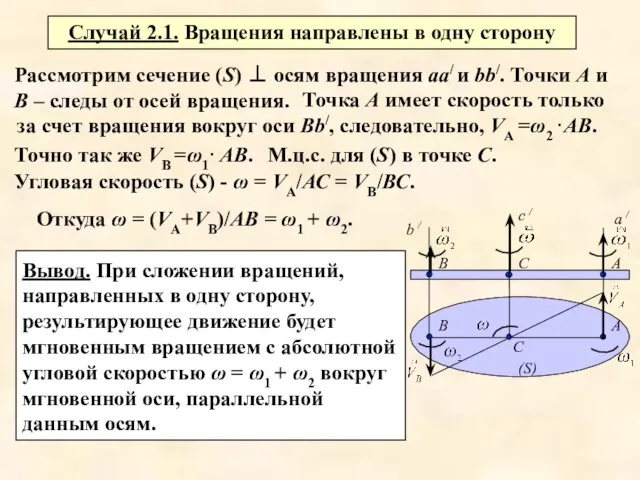
Рассмотрим сечение (S) ⊥ осям вращения аа/ и bb/. Точки А
Рассмотрим сечение (S) ⊥ осям вращения аа/ и bb/. Точки А
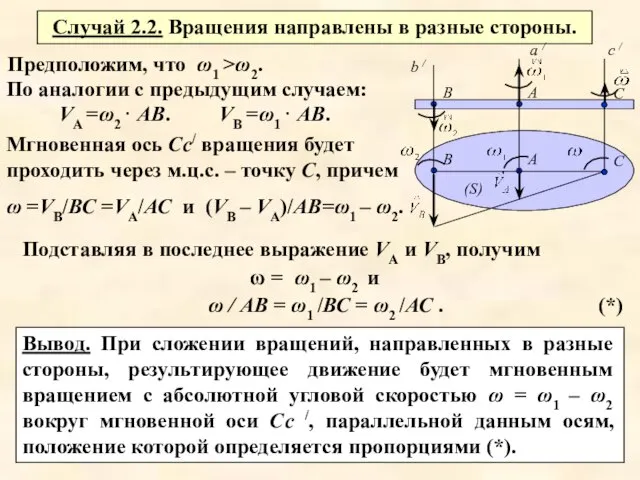
Предположим, что ω1 >ω2.
Мгновенная ось Сс/ вращения будет проходить через
Предположим, что ω1 >ω2.
Мгновенная ось Сс/ вращения будет проходить через
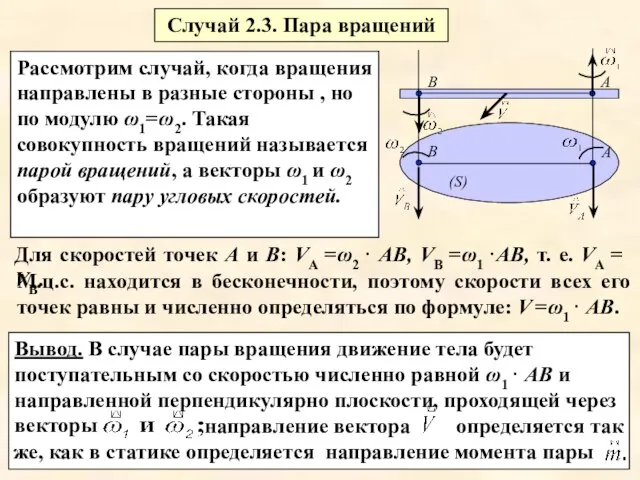
Вывод. В случае пары вращения движение тела будет поступательным со скоростью
Вывод. В случае пары вращения движение тела будет поступательным со скоростью
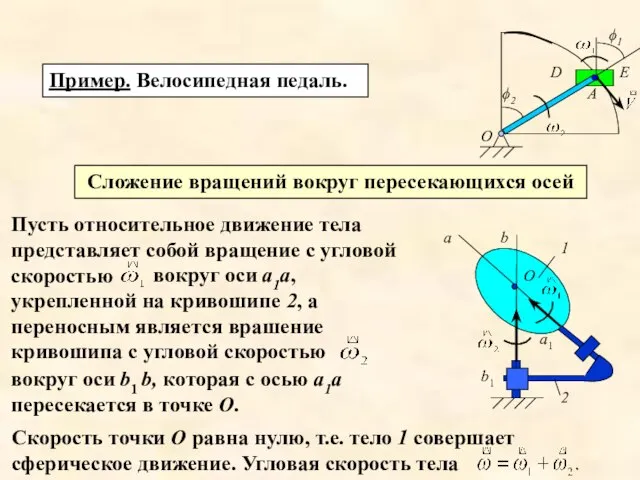
Пусть относительное движение тела представляет собой вращение с угловой скоростью
вокруг
Пусть относительное движение тела представляет собой вращение с угловой скоростью
вокруг
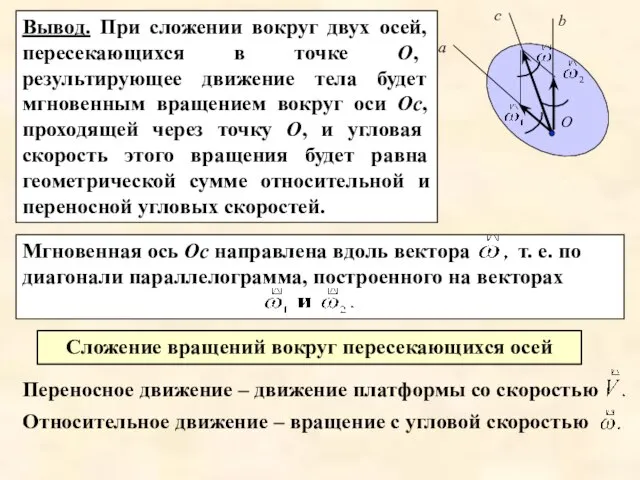
Мгновенная ось Ос направлена вдоль вектора
т. е. по диагонали параллелограмма,
Мгновенная ось Ос направлена вдоль вектора
т. е. по диагонали параллелограмма,
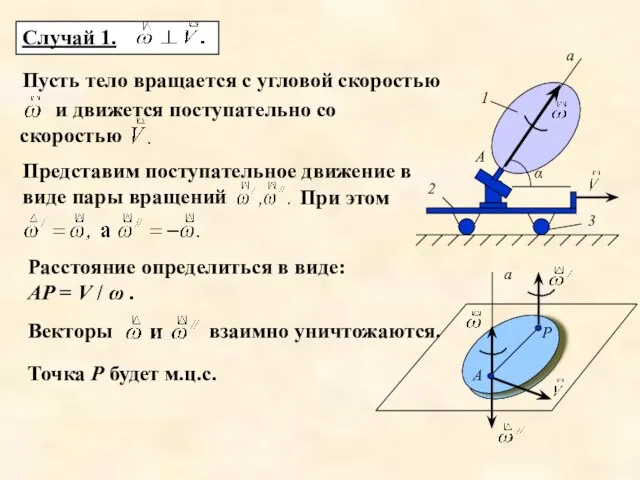
Пусть тело вращается с угловой скоростью
и движется поступательно со скоростью
Случай
Пусть тело вращается с угловой скоростью
и движется поступательно со скоростью
Случай
 «Знатоки физики» (физический ринг) 8 класс по теме: «Тепловые и электрические явления» Составила: Аксёнова Наталья Петровна, МО
«Знатоки физики» (физический ринг) 8 класс по теме: «Тепловые и электрические явления» Составила: Аксёнова Наталья Петровна, МО Магнит өрісі. Магнит индукция векторы
Магнит өрісі. Магнит индукция векторы Соединение половины вида и половины разреза
Соединение половины вида и половины разреза Применение лазерных технологий («лазерный пинцет») для исследования динамики наномашин
Применение лазерных технологий («лазерный пинцет») для исследования динамики наномашин Генератор переменного тока ( устаревшее «альтернатор»)
Генератор переменного тока ( устаревшее «альтернатор») Построение эпюр внутренних усилий в консольной балке при изгибе. Подбор поперечного сечения
Построение эпюр внутренних усилий в консольной балке при изгибе. Подбор поперечного сечения Тепловое излучение
Тепловое излучение Виды и характеристика ионизирующих излучений
Виды и характеристика ионизирующих излучений Тесты по физике. Электрические заряды и электрический ток
Тесты по физике. Электрические заряды и электрический ток Материаловедение. Основные свойства материалов
Материаловедение. Основные свойства материалов Презентация по физике "Магнітний запис інформації" - скачать бесплатно
Презентация по физике "Магнітний запис інформації" - скачать бесплатно Температура Презентацию подготовила Ученица 7А класса МОУ «СОШ №27 УИОП» г.Балаково Бояркина Анастасия Руководитель учитель фи
Температура Презентацию подготовила Ученица 7А класса МОУ «СОШ №27 УИОП» г.Балаково Бояркина Анастасия Руководитель учитель фи Решение задания №22 ЕГЭ по физике
Решение задания №22 ЕГЭ по физике Движение по инерции
Движение по инерции Механическая работа и мощность Подготовка к ГИА
Механическая работа и мощность Подготовка к ГИА Кинематика материальной точки
Кинематика материальной точки Сильно легированные и некристаллические полупроводники
Сильно легированные и некристаллические полупроводники Явления дифракции света
Явления дифракции света Закон всемирного тяготения
Закон всемирного тяготения Радиоизмерения и измерительные приборы
Радиоизмерения и измерительные приборы Теплофизические свойства твердых тел
Теплофизические свойства твердых тел ТЕПЛОМАССОПЕРЕНОС В ЯДЕРНО-ЭНЕРГЕТИЧЕСКИХ УСТАНОВКАХ
ТЕПЛОМАССОПЕРЕНОС В ЯДЕРНО-ЭНЕРГЕТИЧЕСКИХ УСТАНОВКАХ  Агрегатные состояния вещества или чудесные превращения. 8 класс
Агрегатные состояния вещества или чудесные превращения. 8 класс Телескопы
Телескопы Физика экзамен. Вариант 1
Физика экзамен. Вариант 1 Плавное включение ламп накаливания
Плавное включение ламп накаливания Закони Кеплера
Закони Кеплера Гидродинамика
Гидродинамика