- Структурные схемы систем автоматического управления

Содержание
- 2. . 1) Структурные схемы и структурные преобразования Структурной схемой называется изображение системы управления в виде совокупности
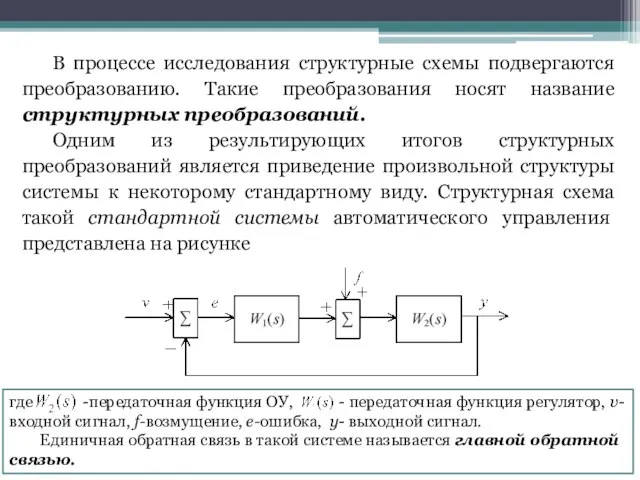
- 3. . где -передаточная функция ОУ, - передаточная функция регулятор, v- входной сигнал, f-возмущение, e-ошибка, y- выходной
- 4. . Преобразование произвольной структуры к стандартному виду осуществляется на основании правил структурных преобразований. Анализ структур систем
- 5. . Для этого соединения справедливы следующие соотношения: Y1(s) = W1(s)·X(s) Y(s) = W2(s)·Y1(s) = W1(s)·W2(s)·X(s) =
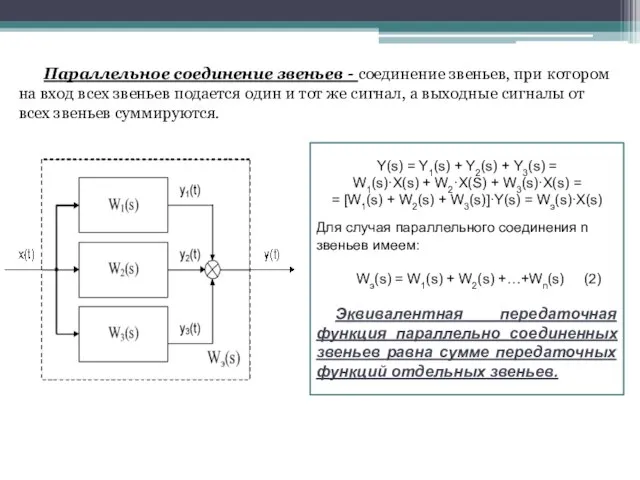
- 6. . Y(s) = Y1(s) + Y2(s) + Y3(s) = W1(s)·X(s) + W2·X(S) + W3(s)·X(s) = =
- 7. . Y(s) = W1(s)·E(s) = W1(s)·[X(s) – Y2(s)] Y2(s) = W2(s)·Y(s) Y(s) = W1(s)·X(s) – W1(s)·Y2(s)
- 8. Wэ(s) = W1(s)/[1 + W1(s)] – ООС (5) Wэ(s) = W1(s)/[1 – W1(s)] – ПОС (6)
- 9. В тех случаях, когда структурная схема оказывается слишком сложной, например, содержит перекрестные связи, ее упрощают пользуясь
- 10. 2) Перенос звена через узел 1) Структурные схемы и структурные преобразования 3) Перенос сумматора через звено
- 11. 4) Перенос звена через сумматор 1) Структурные схемы и структурные преобразования 5) Перенос сумматора через сумматор
- 12. При определении передаточной функции многоконтурной системы используется принцип вложенности: определяется минимальный вложенный контур и его передаточная
- 13. Структурная схема стандартной системы автоматического управления имеет вид где -передаточная функция ОУ, - передаточная функция регулятор,
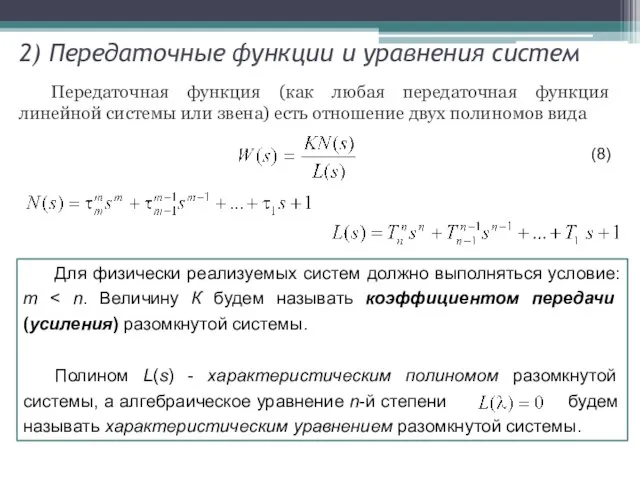
- 14. 2) Передаточные функции и уравнения систем Передаточная функция (как любая передаточная функция линейной системы или звена)
- 15. Если не содержит нулевых корней, то систему управления будем называть статичeской пo отношению к управляющему воздействию.
- 16. Рассмотрим характеристики замкнутой системы (10) передаточная функция замкнутой системы передаточная функция замкнутой системы по ошибке передаточная
- 17. После подстановки, имеем (11) - xapактеpистичeский полином замкнутой систeмы – xapактepистичeкое уpавнeние замкнутой систeмы. Для физически
- 19. Скачать презентацию
.
1) Структурные схемы и структурные преобразования
Структурной схемой называется
.
1) Структурные схемы и структурные преобразования
Структурной схемой называется
.
где -передаточная функция ОУ, - передаточная функция регулятор,
.
где -передаточная функция ОУ, - передаточная функция регулятор,
.
Преобразование произвольной структуры к стандартному виду осуществляется на
.
Преобразование произвольной структуры к стандартному виду осуществляется на

.
Для этого соединения справедливы следующие соотношения:
Y1(s) = W1(s)·X(s) Y(s)
.
Для этого соединения справедливы следующие соотношения:
Y1(s) = W1(s)·X(s) Y(s)
.
Y(s) = Y1(s) + Y2(s) + Y3(s) =
.
Y(s) = Y1(s) + Y2(s) + Y3(s) =
![. Y(s) = W1(s)·E(s) = W1(s)·[X(s) – Y2(s)] Y2(s) = W2(s)·Y(s)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/579290/slide-6.jpg)
.
Y(s) = W1(s)·E(s) = W1(s)·[X(s) – Y2(s)]
Y2(s) =
.
Y(s) = W1(s)·E(s) = W1(s)·[X(s) – Y2(s)]
Y2(s) =
![Wэ(s) = W1(s)/[1 + W1(s)] – ООС (5) Wэ(s) = W1(s)/[1](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/579290/slide-7.jpg)
Wэ(s) = W1(s)/[1 + W1(s)] – ООС (5)
Wэ(s) = W1(s)/[1 + W1(s)] – ООС (5)
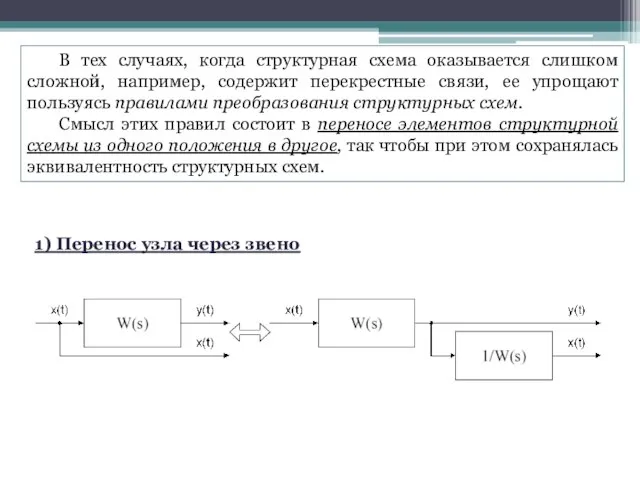
В тех случаях, когда структурная схема оказывается слишком сложной, например, содержит
В тех случаях, когда структурная схема оказывается слишком сложной, например, содержит
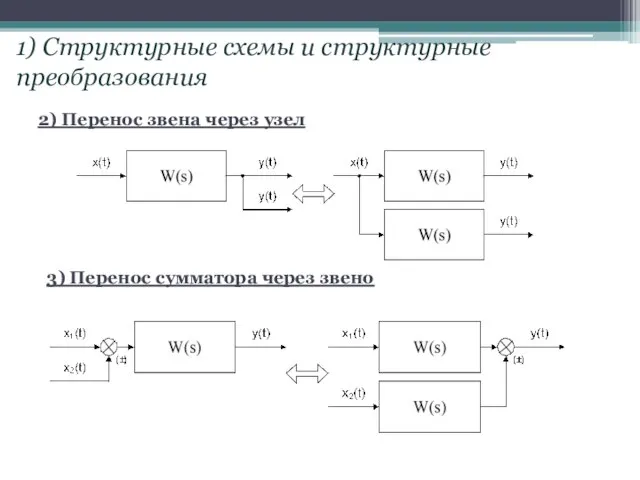
2) Перенос звена через узел
1) Структурные схемы и структурные преобразования
3) Перенос
2) Перенос звена через узел
1) Структурные схемы и структурные преобразования
3) Перенос
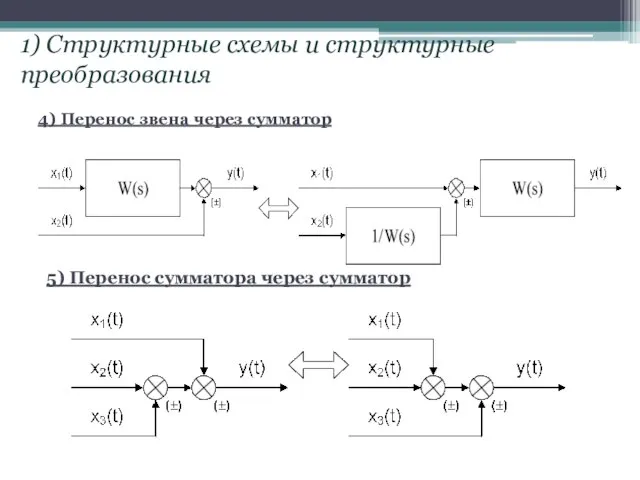
4) Перенос звена через сумматор
1) Структурные схемы и структурные преобразования
5) Перенос
4) Перенос звена через сумматор
1) Структурные схемы и структурные преобразования
5) Перенос
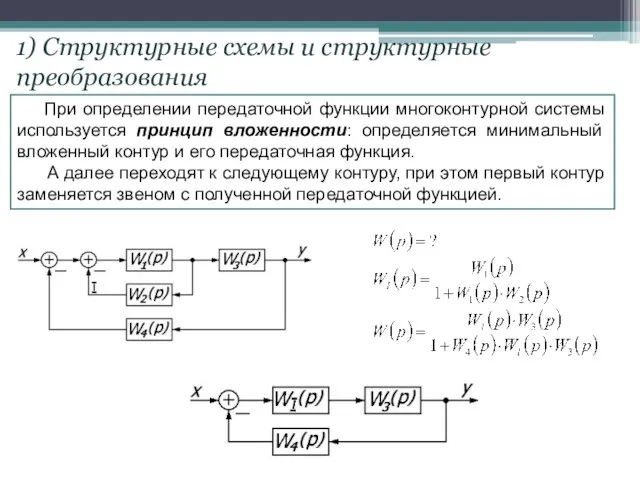
При определении передаточной функции многоконтурной системы используется принцип вложенности: определяется
При определении передаточной функции многоконтурной системы используется принцип вложенности: определяется

Структурная схема стандартной системы автоматического управления имеет вид
где -передаточная функция ОУ,
Структурная схема стандартной системы автоматического управления имеет вид
где -передаточная функция ОУ,
2) Передаточные функции и уравнения систем
Передаточная функция (как любая передаточная функция
2) Передаточные функции и уравнения систем
Передаточная функция (как любая передаточная функция

Если не содержит нулевых корней, то систему управления будем называть статичeской
Если не содержит нулевых корней, то систему управления будем называть статичeской
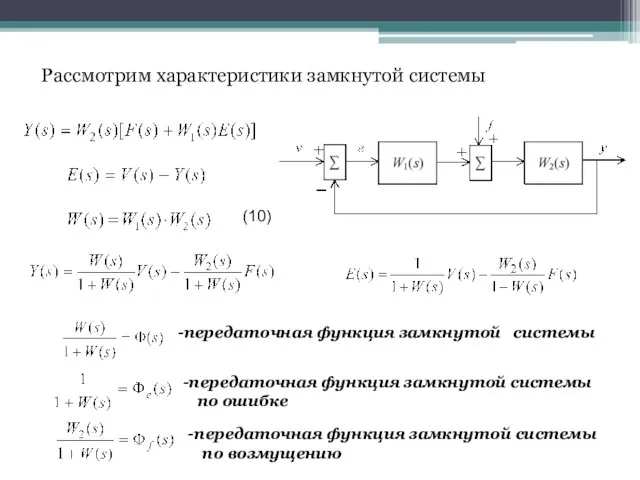
Рассмотрим характеристики замкнутой системы
(10)
передаточная функция замкнутой системы
передаточная функция замкнутой системы
Рассмотрим характеристики замкнутой системы
(10)
передаточная функция замкнутой системы
передаточная функция замкнутой системы
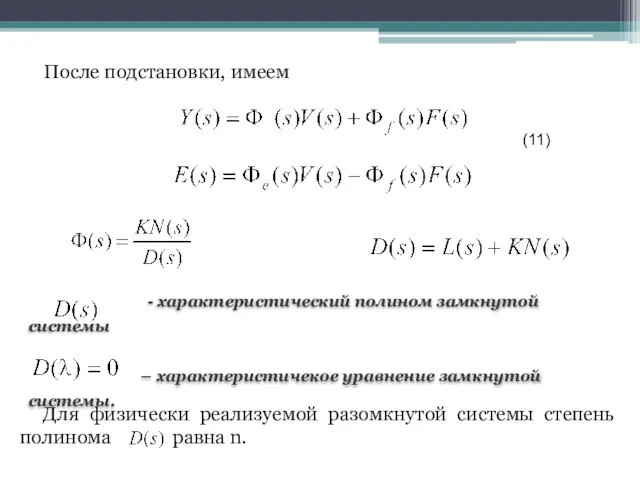
После подстановки, имеем
(11)
- xapактеpистичeский полином замкнутой систeмы
– xapактepистичeкое уpавнeние
После подстановки, имеем
(11)
- xapактеpистичeский полином замкнутой систeмы
– xapактepистичeкое уpавнeние
 Образование дисперсных систем
Образование дисперсных систем Презентация на тему: «Теория фотоэффекта»
Презентация на тему: «Теория фотоэффекта» ТЕМА УРОКА «Закон Паскаля»
ТЕМА УРОКА «Закон Паскаля» Гравиметрическая, или гравитационная разведка (гравиразведка)
Гравиметрическая, или гравитационная разведка (гравиразведка) Физические процессы в биологических мембранах. (Лекции 8, 9)
Физические процессы в биологических мембранах. (Лекции 8, 9) Жоғары жиілікті сыйымдылықты разрядтың
Жоғары жиілікті сыйымдылықты разрядтың Сила пружності. Закон Гука
Сила пружності. Закон Гука «Световые явления» урок – обобщение 8 класс Разработала: Аксёнова Наталья Петровна, МОУ «СОШ № 100» г. Новокузнецк 2010 г.
«Световые явления» урок – обобщение 8 класс Разработала: Аксёнова Наталья Петровна, МОУ «СОШ № 100» г. Новокузнецк 2010 г.  Маломощные радиостанции КВ диапазона. Тактико-технические данные радиостанции Р-130М. (Тема 4.1)
Маломощные радиостанции КВ диапазона. Тактико-технические данные радиостанции Р-130М. (Тема 4.1) Аттестационная работа. Программа для отделения НО “Юный физик” для учащихся 7-9 классов
Аттестационная работа. Программа для отделения НО “Юный физик” для учащихся 7-9 классов Основы физики прочности и пластичности
Основы физики прочности и пластичности Fluorescence lyman-alpha stratospheric hygrometer (flash): application on meteorological balloons, long duration balloons
Fluorescence lyman-alpha stratospheric hygrometer (flash): application on meteorological balloons, long duration balloons Гідростатичний парадокс Автор: Загородня Катерина, учениця 8 класу Новогуйвинської гімназії Житомирського району Житомирськ
Гідростатичний парадокс Автор: Загородня Катерина, учениця 8 класу Новогуйвинської гімназії Житомирського району Житомирськ Звуковые волны
Звуковые волны Кріогенна техніка і технологія. Вступна лекція
Кріогенна техніка і технологія. Вступна лекція Решение задач на равноускоренное движение с помощью производных
Решение задач на равноускоренное движение с помощью производных Технология решения творческих изобретательских задач
Технология решения творческих изобретательских задач Производство, передача и использование электроэнергии
Производство, передача и использование электроэнергии Домашняя лабораторная работа. Ученицы 8 класса «Г» Навальневой Евгении. Исследование факторов влияющих на скорость испарения.
Домашняя лабораторная работа. Ученицы 8 класса «Г» Навальневой Евгении. Исследование факторов влияющих на скорость испарения. Короткое замыкание
Короткое замыкание Переменный электрический ток
Переменный электрический ток Система параллельных сил и пар
Система параллельных сил и пар Физико-технические основы создания ЭГК для термоэмиссионных ЯЭУ различного назначения
Физико-технические основы создания ЭГК для термоэмиссионных ЯЭУ различного назначения Механические волны
Механические волны Уравнение непрерывности
Уравнение непрерывности Презентация Прямолинейное равномерное движение
Презентация Прямолинейное равномерное движение  Качественный хроматографический анализ
Качественный хроматографический анализ Max.Industries. Технология термоядерного реактора
Max.Industries. Технология термоядерного реактора