- Структурный анализ механизмов. Вводная лекция (лекции №1)

Содержание
- 2. Теория механизмов и машин - наука, изучающая строение, кинематику и динамику механизмов в связи с их
- 3. Механизм система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других
- 4. Механизм система подвижных тел, одно из которых закреплено, а все остальные могут совершать вполне определенные движения
- 5. Классы механизмов 1. Механизмы двигателей и преобразователей; 2. Передаточные механизмы; 3. Исполнительные механизмы: 4. Механизмы управления,
- 6. Виды механизмов 1. Рычажные механизмы; 2. Зубчатые механизмы; 3. Кулачковые механизмы; 4. Комбинированные механизмы; (кулачково-рычажные, рычажно-зубчатые
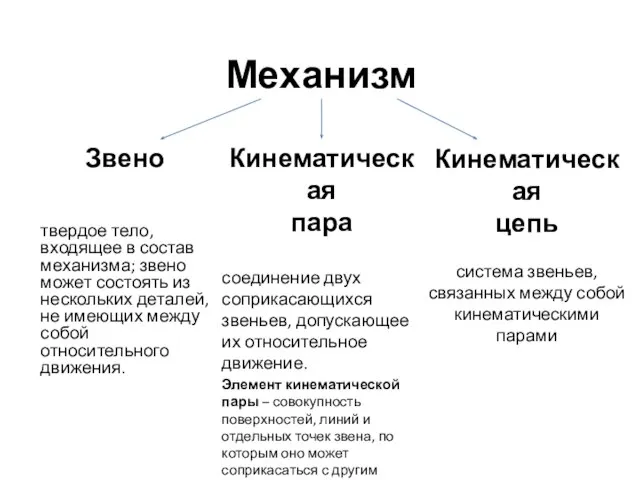
- 7. Механизм Звено твердое тело, входящее в состав механизма; звено может состоять из нескольких деталей, не имеющих
- 8. Виды звеньев стойка - звено, принимаемое за неподвижное; кривошип – вращающееся звено рычажного механизма, которое может
- 9. Виды звеньев
- 10. Виды звеньев
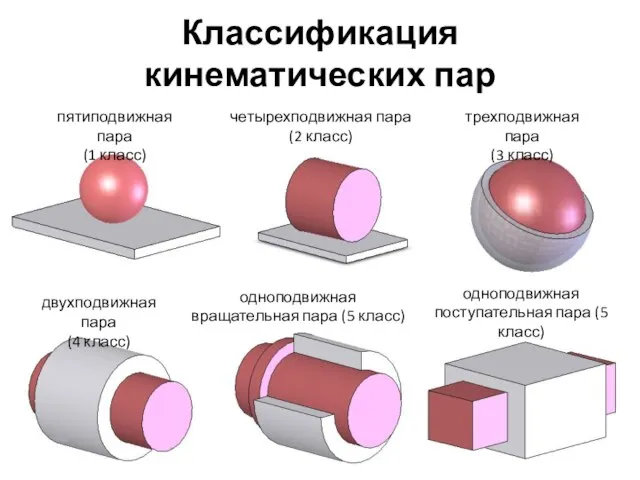
- 11. Классификация кинематических пар 1) По числу связей, налагаемых на относительное движение звеньев. Всякое свободно движущееся в
- 12. Классификация кинематических пар пятиподвижная пара (1 класс) четырехподвижная пара (2 класс) трехподвижная пара (3 класс) двухподвижная
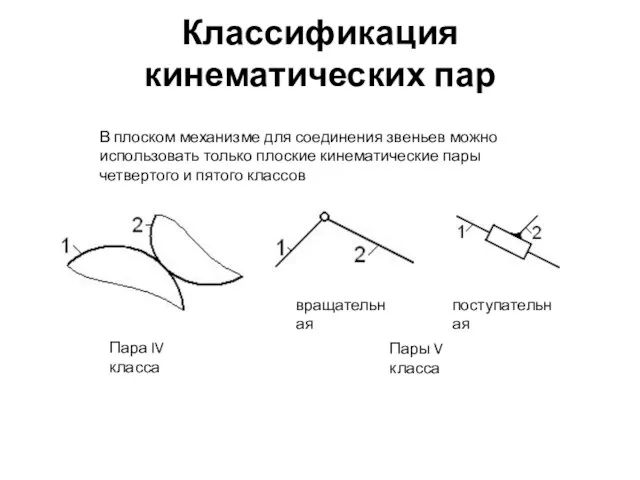
- 13. Классификация кинематических пар В плоском механизме для соединения звеньев можно использовать только плоские кинематические пары четвертого
- 14. Классификация кинематических цепей 1) По области движения звеньев цепи бывают плоские (траектории движения точек всех звеньев
- 15. Некоторые дополнительные определения обобщенная координата механизма – каждая из независимых координат, определяющих положение всех звеньев механизма
- 16. Степень подвижности механизма формула П. Л. Чебышева (для плоских механизмов) Впервые выведена им в 1869 г.
- 17. Степень подвижности механизма При расчете степени подвижности механизма необходимо учитывать следующие, нередко встречающиеся ситуации: наличие кратных
- 18. Виды звеньев
- 19. Классификация плоских механизмов по Л.В.Ассуру Группа Ассура – это кинематическая цепь с нулевой степенью подвижности относительно
- 20. Классификация плоских механизмов по Л.В.Ассуру Пусть группа состоит из n звеньев; для соединения этих звеньев между
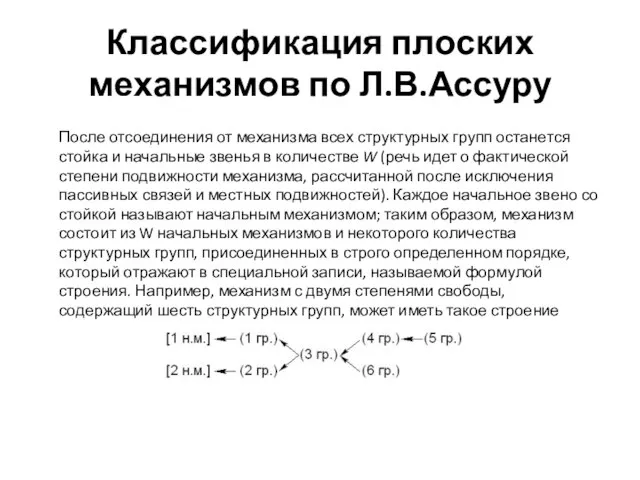
- 21. Классификация плоских механизмов по Л.В.Ассуру После отсоединения от механизма всех структурных групп останется стойка и начальные
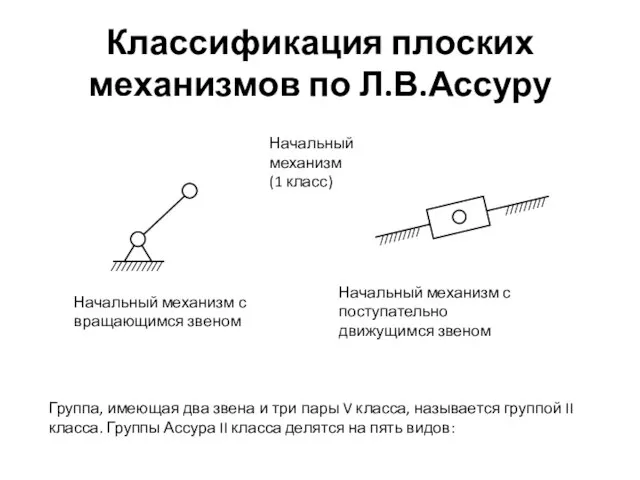
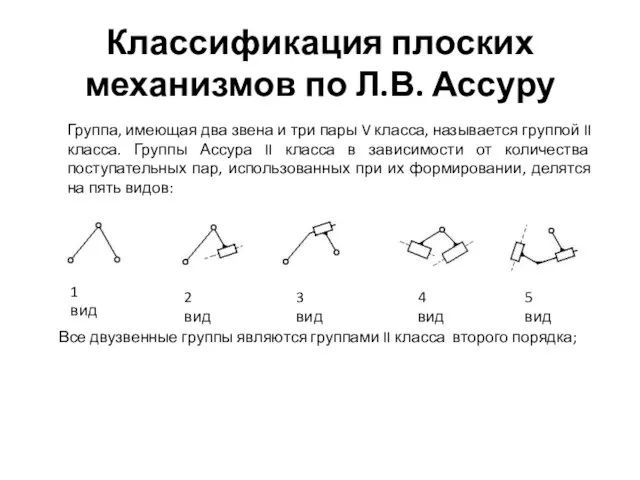
- 22. Классификация плоских механизмов по Л.В.Ассуру Группа, имеющая два звена и три пары V класса, называется группой
- 23. Классификация плоских механизмов по Л.В. Ассуру 1 вид 2 вид 3 вид 4 вид 5 вид
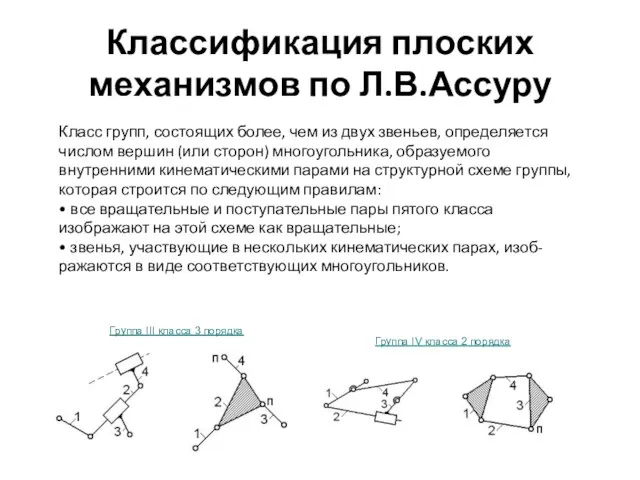
- 24. Классификация плоских механизмов по Л.В.Ассуру Класс групп, состоящих более, чем из двух звеньев, определяется числом вершин
- 26. Скачать презентацию
Теория механизмов и машин - наука, изучающая строение, кинематику и динамику
Теория механизмов и машин - наука, изучающая строение, кинематику и динамику
Механизм
система тел, предназначенная для преобразования движения одного или нескольких твердых
Механизм система тел, предназначенная для преобразования движения одного или нескольких твердых
Механизм
система подвижных тел, одно из которых закреплено, а все остальные
Механизм система подвижных тел, одно из которых закреплено, а все остальные
Классы механизмов
1. Механизмы двигателей и преобразователей;
2. Передаточные механизмы;
3. Исполнительные механизмы:
4. Механизмы
Классы механизмов
1. Механизмы двигателей и преобразователей;
2. Передаточные механизмы;
3. Исполнительные механизмы:
4. Механизмы
Виды механизмов
1. Рычажные механизмы;
2. Зубчатые механизмы;
3. Кулачковые механизмы;
4. Комбинированные механизмы;
(кулачково-рычажные, рычажно-зубчатые
Виды механизмов
1. Рычажные механизмы;
2. Зубчатые механизмы;
3. Кулачковые механизмы;
4. Комбинированные механизмы;
(кулачково-рычажные, рычажно-зубчатые
Механизм
Звено
твердое тело, входящее в состав механизма; звено может состоять из нескольких
Механизм
Звено
твердое тело, входящее в состав механизма; звено может состоять из нескольких
Виды звеньев
стойка - звено, принимаемое за неподвижное;
кривошип – вращающееся звено рычажного
Виды звеньев
стойка - звено, принимаемое за неподвижное;
кривошип – вращающееся звено рычажного

Виды звеньев
Виды звеньев

Виды звеньев
Виды звеньев
Классификация
кинематических пар
1) По числу связей, налагаемых на относительное движение звеньев.
Всякое
Классификация
кинематических пар
1) По числу связей, налагаемых на относительное движение звеньев.
Всякое
Классификация
кинематических пар
пятиподвижная пара
(1 класс)
четырехподвижная пара
(2 класс)
трехподвижная пара
(3
Классификация
кинематических пар
пятиподвижная пара
(1 класс)
четырехподвижная пара
(2 класс)
трехподвижная пара (3
Классификация
кинематических пар
В плоском механизме для соединения звеньев можно использовать только
Классификация
кинематических пар
В плоском механизме для соединения звеньев можно использовать только
Классификация
кинематических цепей
1) По области движения звеньев цепи бывают плоские (траектории
Классификация
кинематических цепей
1) По области движения звеньев цепи бывают плоские (траектории
Некоторые дополнительные определения
обобщенная координата механизма – каждая из независимых координат, определяющих
Некоторые дополнительные определения
обобщенная координата механизма – каждая из независимых координат, определяющих
Степень подвижности
механизма
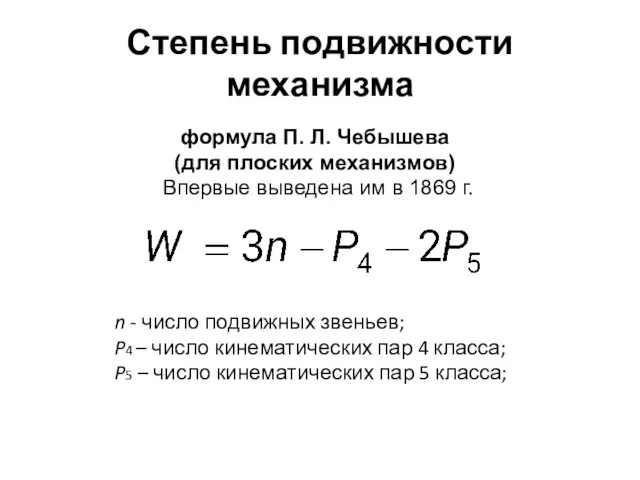
формула П. Л. Чебышева
(для плоских механизмов)
Впервые выведена им в
Степень подвижности
механизма
формула П. Л. Чебышева
(для плоских механизмов)
Впервые выведена им в
Степень подвижности
механизма
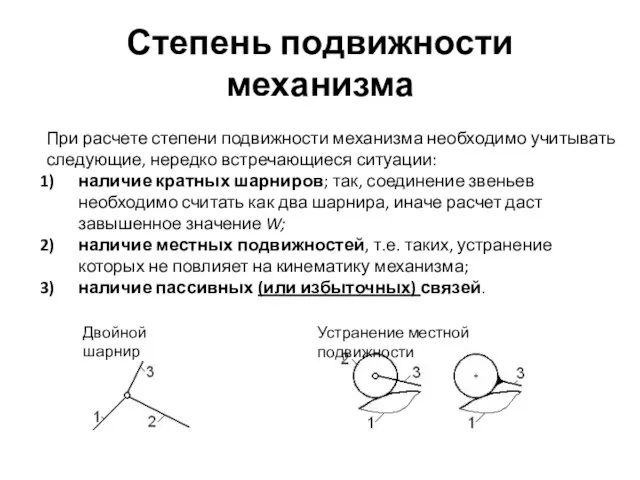
При расчете степени подвижности механизма необходимо учитывать следующие, нередко встречающиеся
Степень подвижности
механизма
При расчете степени подвижности механизма необходимо учитывать следующие, нередко встречающиеся

Виды звеньев
Виды звеньев
Классификация плоских механизмов по Л.В.Ассуру
Группа Ассура – это кинематическая цепь с
Классификация плоских механизмов по Л.В.Ассуру
Группа Ассура – это кинематическая цепь с
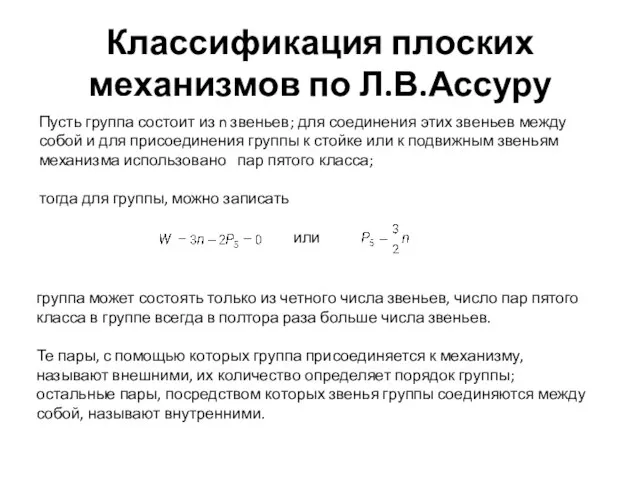
Классификация плоских механизмов по Л.В.Ассуру
Пусть группа состоит из n звеньев; для
Классификация плоских механизмов по Л.В.Ассуру
Пусть группа состоит из n звеньев; для
Классификация плоских механизмов по Л.В.Ассуру
После отсоединения от механизма всех структурных групп
Классификация плоских механизмов по Л.В.Ассуру
После отсоединения от механизма всех структурных групп
Классификация плоских механизмов по Л.В.Ассуру
Группа, имеющая два звена и три пары
Классификация плоских механизмов по Л.В.Ассуру
Группа, имеющая два звена и три пары
Классификация плоских механизмов по Л.В. Ассуру
1 вид
2 вид
3 вид
4 вид
5 вид
Группа,
Классификация плоских механизмов по Л.В. Ассуру
1 вид
2 вид
3 вид
4 вид
5 вид
Группа,
Классификация плоских механизмов по Л.В.Ассуру
Класс групп, состоящих более, чем из двух
Классификация плоских механизмов по Л.В.Ассуру
Класс групп, состоящих более, чем из двух
 Виды самоходной техники в АПК
Виды самоходной техники в АПК История изобретения паровых машин. Работу выполнила ученица 8б класса МКОУ СОШ пгт Подосиновец Пунченко Анастасия
История изобретения паровых машин. Работу выполнила ученица 8б класса МКОУ СОШ пгт Подосиновец Пунченко Анастасия Устный журнал
Устный журнал Термический каротаж. Внешние источники тепла. Излучение Солнца, звезд и галактик
Термический каротаж. Внешние источники тепла. Излучение Солнца, звезд и галактик Измерение основных физических величин
Измерение основных физических величин ,,Золоте правило” механіки
,,Золоте правило” механіки Домашнее задание по энтропии
Домашнее задание по энтропии Stretching springs
Stretching springs Средства тепловой диагностики, обработка и представление результатов измерений
Средства тепловой диагностики, обработка и представление результатов измерений Электрический ток в различных средах
Электрический ток в различных средах Сопутствующие явления. Диффузия
Сопутствующие явления. Диффузия Резонанс. Проявление в природе и технике
Резонанс. Проявление в природе и технике Линзы. Оптическая сила линзы Учитель физики МОУ Будинская ООШ Бабаева Валентина Васильевна.
Линзы. Оптическая сила линзы Учитель физики МОУ Будинская ООШ Бабаева Валентина Васильевна. Презентация по физике "Метод учебного проекта в преподавнии физики" -
Презентация по физике "Метод учебного проекта в преподавнии физики" -  Zaman boyutu (11)
Zaman boyutu (11) Энергія і яе крыніцы
Энергія і яе крыніцы Механические муфты
Механические муфты Термодинамика идеального газа. (Лекция 2)
Термодинамика идеального газа. (Лекция 2) Теория автоматического управления
Теория автоматического управления Урок по теме: « Звуковые волны». Пояснительная записка. Урок проводится в 8 – ом классе . Начинается урок с эпиграфа, который оп
Урок по теме: « Звуковые волны». Пояснительная записка. Урок проводится в 8 – ом классе . Начинается урок с эпиграфа, который оп Инерция
Инерция Винайдення автобуса
Винайдення автобуса Дуговой разряд
Дуговой разряд Акустика как часть физики
Акустика как часть физики Соединение деталей из тонколистового металла
Соединение деталей из тонколистового металла ДАВЛЕНИЕ ТВЕРДЫХ ТЕЛ
ДАВЛЕНИЕ ТВЕРДЫХ ТЕЛ  Методы наблюдения и регистрации элементарных частиц
Методы наблюдения и регистрации элементарных частиц МАНОМЕТРЫ 7 КЛАСС Автор: учитель физики МОУ «СОШ № 1» г. Ивантеевки Гагарина Марианна Сергеевна
МАНОМЕТРЫ 7 КЛАСС Автор: учитель физики МОУ «СОШ № 1» г. Ивантеевки Гагарина Марианна Сергеевна