- Теория подобия и моделирования

Содержание
- 2. Турбулентное и ламинарное течение Критерий Рейнольдса Re = dwρ/μ d - диаметр; w - скорость потока;
- 3. Турбулентность Турбуле́нтность (лат.. turbulentus — бурный, беспорядочный)- явление, заключающееся в том, что, обычно, при увеличении скорости
- 4. Динамические аналогии При ламинарном и турбулентном течениях работают разные формулы. Отдельные Идея признаки (гипотеза ) аналогии
- 5. Методы получения критериев подобия. Метод основан на использовании: а). π - теоремы (теоремы Букингема) б). Метода
- 6. Пример Пример Определение коэффициента лобового сопротивления. Дано: Труба с водой (модель); Характерный размер d; Значения параметров
- 7. Есть некая функция, которая определяет силу лобового сопротивления как ϕ(wa, db, ρc, μλ) = F Определим
- 8. π - теорема Всякое полное уравнение физического процесса записанное в определенной системе единиц может быть представлена
- 9. Пусть P1,..., Pk - независимые параметры; Pk+1,..., Pm - зависимые параметры. Pk+1,..., Pm. следует выразить через
- 10. [P0,k+1] = ψk+1{[P01],...,[P0k]} . . . . . . . . . . [P0,s] = ψs{[P01],...,[P0k]}
- 11. Пусть k = q ln[a] = ln[b] = . . . . ln[q] = Определяем [a],[b],...,[q]
- 12. k [P0,s] = ∏[P0i]Di,s/D i=1 Di,k+1/D = xi Di,s/D = yi Di,m/D = zi k [P0,k+1]
- 13. Пусть P1 = P01 P2 = P02 . . . . Pk = P0k k k
- 14. Планирование эксперимента; основные понятия
- 15. Планирование эксперимента Основные понятия. - Активный эксперимент - Пассивный эксперимент Основная идея активного эксперимента - добиться
- 16. 4. Область определения. Нормированные переменные. Пусть xj*- реальные факторы xj - нормированные факторы -1≤ xj ≤
- 17. М - информационная матрица плана X размерности (k+1)×(k+1) det(A-λI) = 0 где λ - корни характеристического
- 18. Пример Пусть модель y(a,x) = a0 + a1x1 + a2x2 +... + anxn x0 = 0
- 19. 8. Критерий планирования эксперимента. План эксперимента зависит от выбранного критерия. Критерий в основном определяет либо требования
- 20. Полный (простой) факторный эксперимент. Факторы - число n (n=3) Уровни (2) - (значения факторов - +1,
- 21. Планы для квадратичных моделей. Композиционный план второго порядка y = a0 + a1x1 + a2x2 +
- 22. Понятие рандомизации. Рандомизация заключается в том, что планируемые опыты выписываются в логическом порядке, а затем их
- 23. Главный эффект фактора А пропорционален разности между: а) средним значением по всем откликам, включающим обработку фактора
- 24. Греко-латинские квадраты. Латинский квадрат. Пусть имеются 3 фактора - P, L, S, и 4 уровня -
- 25. Метод экспериментальной оптимизации. Эти процедуры применяются при η =поиске оптимальных условий либо на объекте, либо на
- 26. Метод Бокса-Уилсона. Идея метода заключается в использовании метода крутого восхождения в сочетании с последовательно планируемым факторным
- 27. m – номер итерации α влияет на шаг. - оператор Набла Δх нужно подсчитать
- 28. Пример (на градиентный метод) max f(x) = 4x1 + 2x2 - x12 - x22 +5 =
- 29. ∂f/∂x1 = 4 - 2x1 ∂f/∂x2 = 2 - 2x2 ∇f(x0) = (4-2*4, 2-2*5) = (-4,
- 30. Оценивание градиента. Если функция η(x1, x2,..., xk), где x1, x2,..., xk - размерные величины, то перейдем
- 31. x2 x1 - из регрессионной модели - из разложения в ряд Тейлора Проведя факторный эксперимент и
- 32. Метод интегральных аналогов. Для получения критериев подобия по методу интегральных аналогов необходимо знать уравнения системы или
- 34. Пренебрегаем индексом 1; Разделим члены уравнения на - число подобия Струхаля - число подобия Фруда -
- 35. Фракталы. Размерность Хаусдорфа-Безиковича.
- 36. Введение Автор понятия и первых работ по фрактальной геометрии Бенуа Мандельброт Нестрогое определение: Фрактал - это
- 37. IFS (Iterated Functions Systems) Kern: xk+1= Fx (xk, yk) yk+1= Fy (xk, yk) Mandel / Julia
- 38. Примеры фракталов
- 39. 3D
- 41. Скачать презентацию
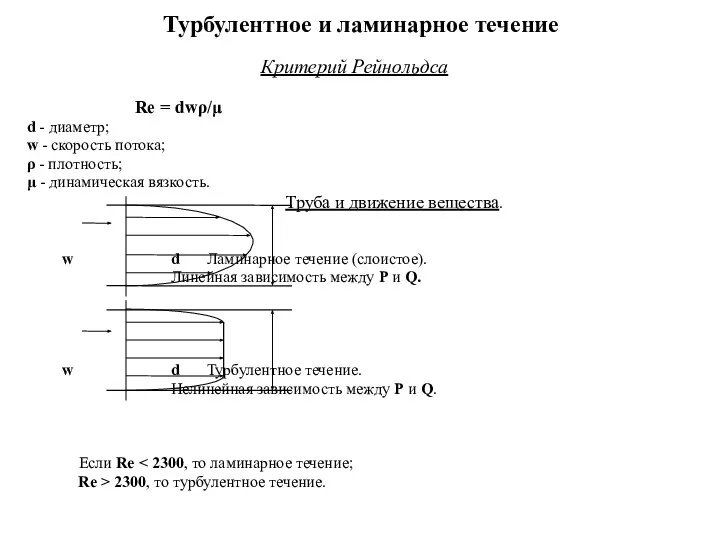
Турбулентное и ламинарное течение
Критерий Рейнольдса
Re = dwρ/μ
d - диаметр;
w - скорость
Турбулентное и ламинарное течение
Критерий Рейнольдса
Re = dwρ/μ
d - диаметр;
w - скорость
Турбулентность
Турбуле́нтность (лат.. turbulentus — бурный, беспорядочный)- явление, заключающееся в том, что, обычно, при
Турбулентность
Турбуле́нтность (лат.. turbulentus — бурный, беспорядочный)- явление, заключающееся в том, что, обычно, при
Динамические аналогии
При ламинарном и турбулентном течениях работают разные формулы.
Отдельные Идея
признаки
Динамические аналогии
При ламинарном и турбулентном течениях работают разные формулы.
Отдельные Идея
признаки
Методы получения критериев подобия.
Метод основан на использовании:
а). π - теоремы (теоремы
Методы получения критериев подобия.
Метод основан на использовании:
а). π - теоремы (теоремы
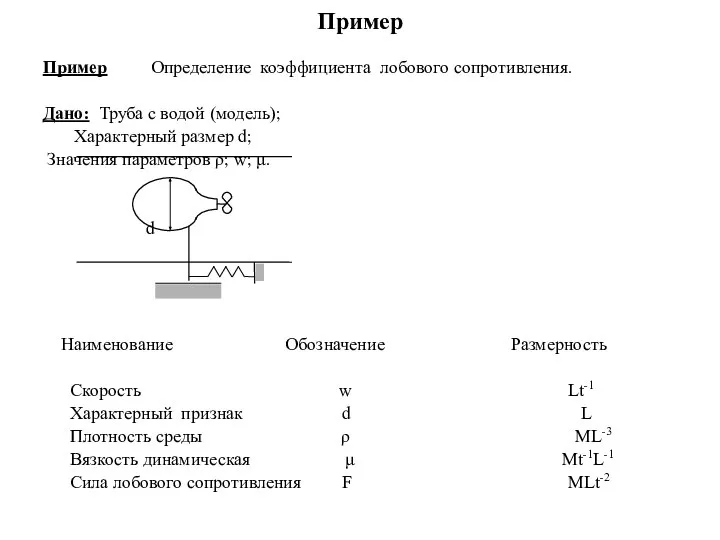
Пример
Пример Определение коэффициента лобового сопротивления.
Дано: Труба с водой (модель);
Характерный размер
Пример
Пример Определение коэффициента лобового сопротивления.
Дано: Труба с водой (модель);
Характерный размер
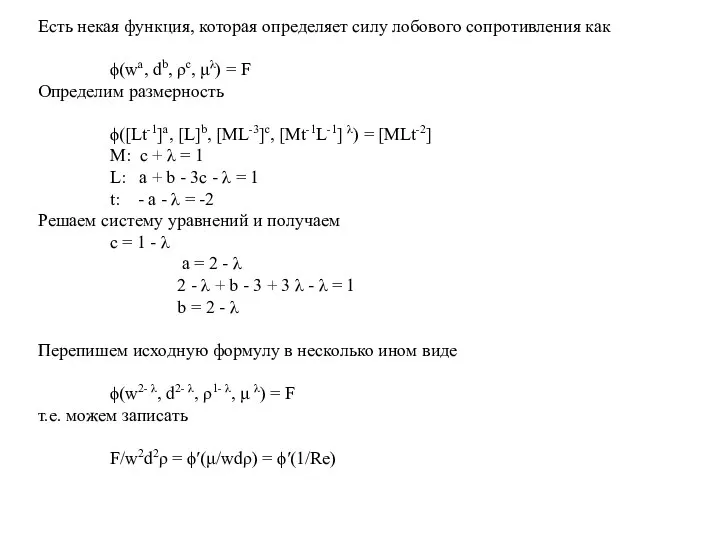
Есть некая функция, которая определяет силу лобового сопротивления как
ϕ(wa, db, ρc,
Есть некая функция, которая определяет силу лобового сопротивления как ϕ(wa, db, ρc,
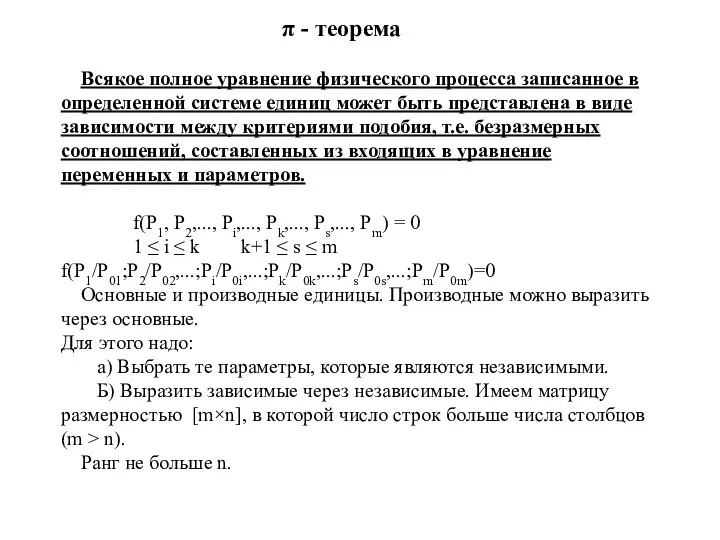
π - теорема
Всякое полное уравнение физического процесса записанное в
π - теорема Всякое полное уравнение физического процесса записанное в
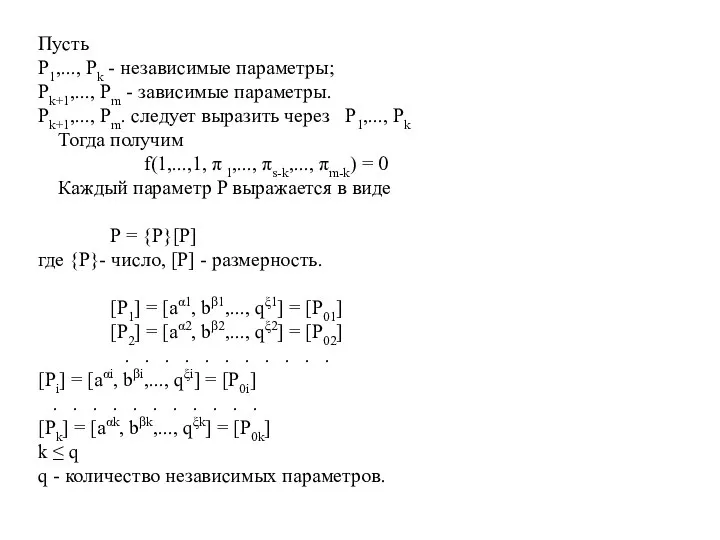
Пусть
P1,..., Pk - независимые параметры;
Pk+1,..., Pm - зависимые параметры.
Pk+1,..., Pm.
Пусть P1,..., Pk - независимые параметры; Pk+1,..., Pm - зависимые параметры. Pk+1,..., Pm.
![[P0,k+1] = ψk+1{[P01],...,[P0k]} . . . . . . . .](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1457352/slide-9.jpg)
[P0,k+1] = ψk+1{[P01],...,[P0k]}
. . . . . . . .
[P0,k+1] = ψk+1{[P01],...,[P0k]} . . . . . . . .
![Пусть k = q ln[a] = ln[b] = . . .](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1457352/slide-10.jpg)
Пусть k = q
ln[a] =
ln[b] =
. . . .
ln[q] =
Определяем
Пусть k = q ln[a] = ln[b] = . . . . ln[q] = Определяем
![k [P0,s] = ∏[P0i]Di,s/D i=1 Di,k+1/D = xi Di,s/D = yi](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1457352/slide-11.jpg)
k
[P0,s] = ∏[P0i]Di,s/D
i=1
Di,k+1/D = xi
Di,s/D = yi
Di,m/D = zi
k [P0,s] = ∏[P0i]Di,s/D i=1 Di,k+1/D = xi Di,s/D = yi Di,m/D = zi

Пусть
P1 = P01
P2 = P02
. . . .
Pk =
Пусть P1 = P01 P2 = P02 . . . . Pk =

Планирование эксперимента;
основные понятия
Планирование эксперимента;
основные понятия
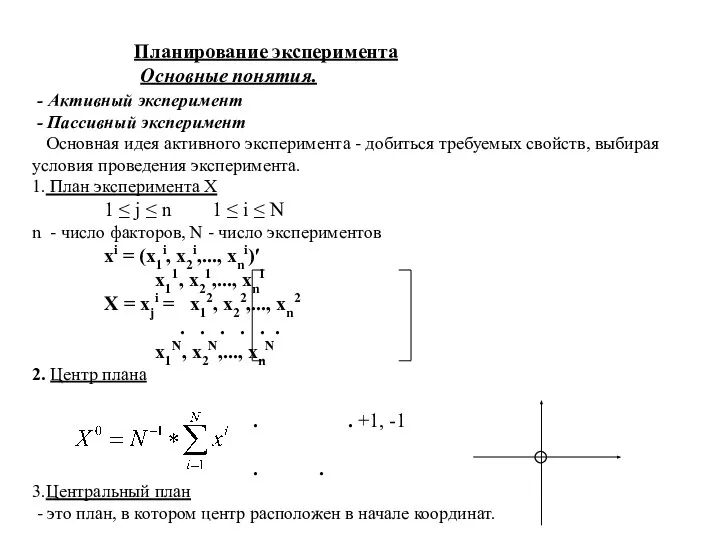
Планирование эксперимента
Основные понятия.
- Активный эксперимент
- Пассивный эксперимент
Основная
Планирование эксперимента Основные понятия. - Активный эксперимент - Пассивный эксперимент Основная
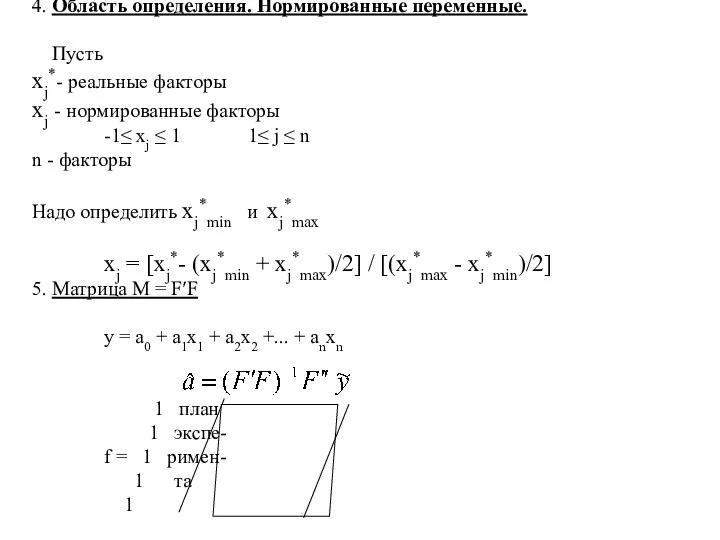
4. Область определения. Нормированные переменные.
Пусть
xj*- реальные факторы
xj -
4. Область определения. Нормированные переменные. Пусть xj*- реальные факторы xj -

М - информационная матрица плана X размерности (k+1)×(k+1)
det(A-λI) = 0
где λ
М - информационная матрица плана X размерности (k+1)×(k+1) det(A-λI) = 0 где λ
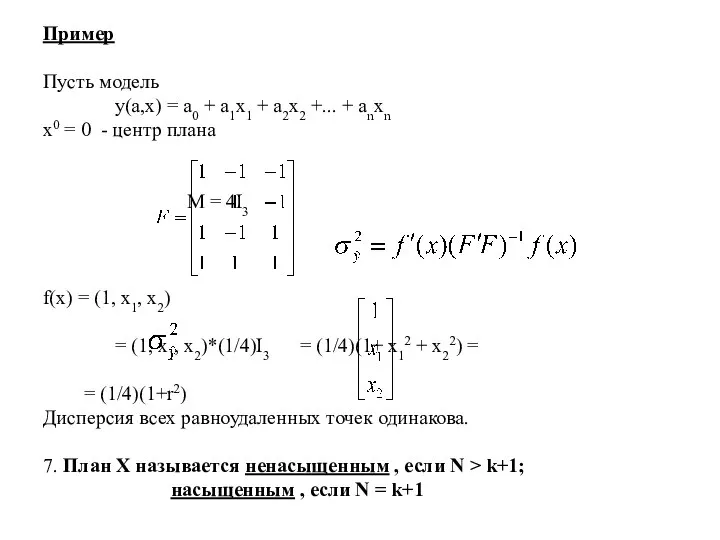
Пример
Пусть модель
y(a,x) = a0 + a1x1 + a2x2 +... +
Пример Пусть модель y(a,x) = a0 + a1x1 + a2x2 +... +
8. Критерий планирования эксперимента.
План эксперимента зависит от выбранного критерия. Критерий
8. Критерий планирования эксперимента. План эксперимента зависит от выбранного критерия. Критерий
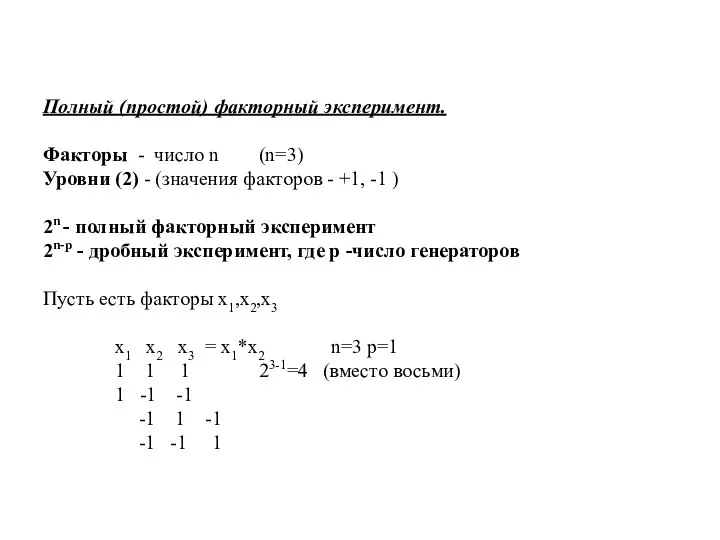
Полный (простой) факторный эксперимент.
Факторы - число n (n=3)
Уровни (2) - (значения факторов
Полный (простой) факторный эксперимент. Факторы - число n (n=3) Уровни (2) - (значения факторов
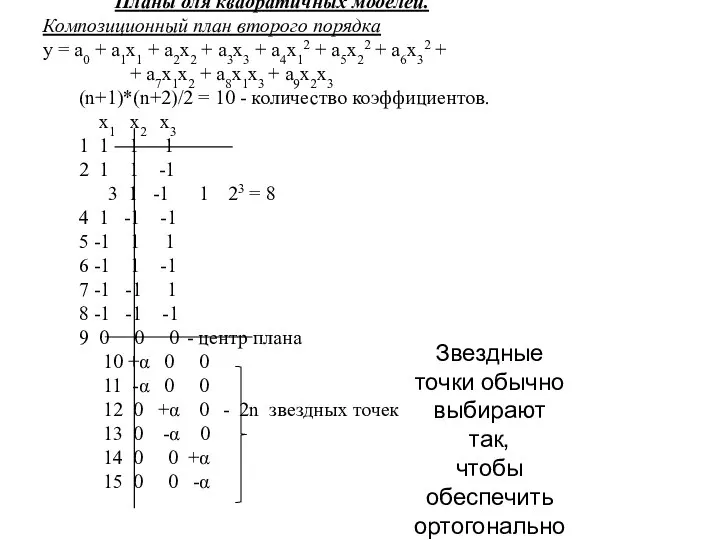
Планы для квадратичных моделей.
Композиционный план второго порядка
y = a0 + a1x1
Планы для квадратичных моделей. Композиционный план второго порядка y = a0 + a1x1
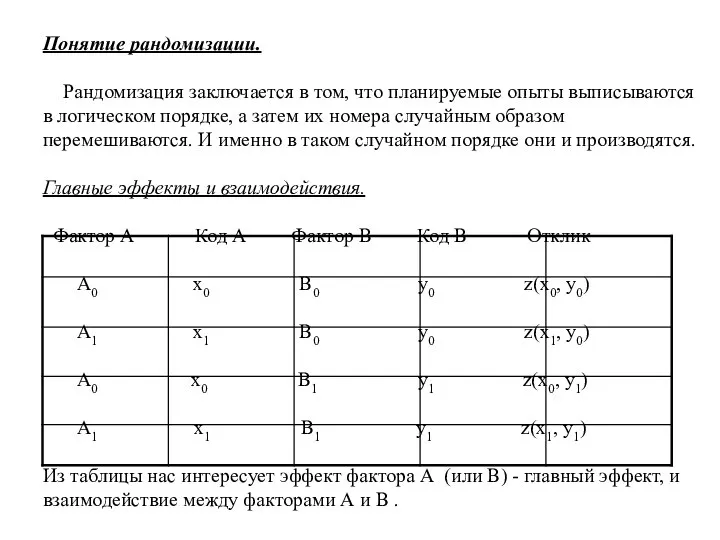
Понятие рандомизации.
Рандомизация заключается в том, что планируемые опыты выписываются в
Понятие рандомизации. Рандомизация заключается в том, что планируемые опыты выписываются в
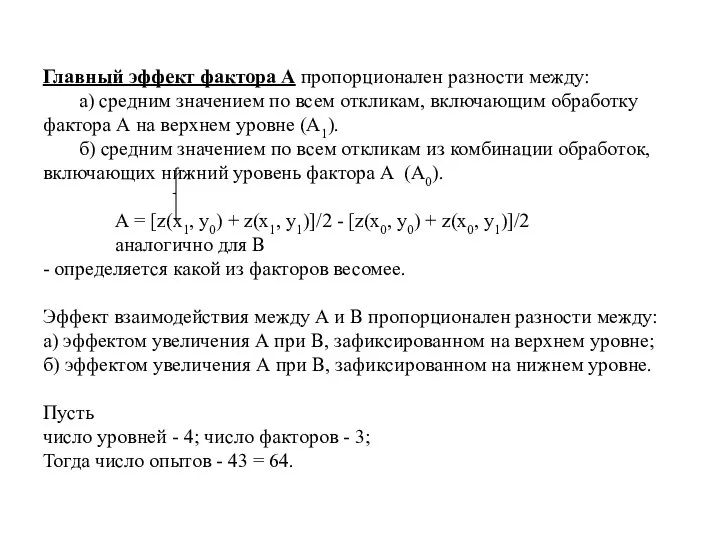
Главный эффект фактора А пропорционален разности между:
а) средним значением по всем
Главный эффект фактора А пропорционален разности между: а) средним значением по всем
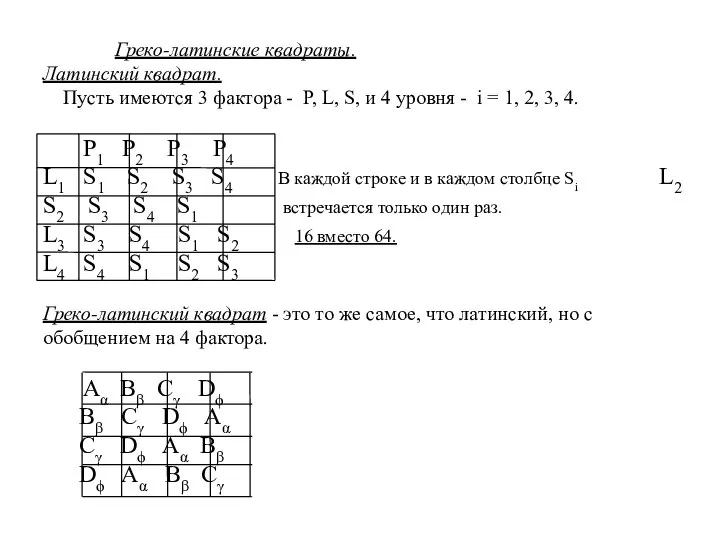
Греко-латинские квадраты.
Латинский квадрат.
Пусть имеются 3 фактора - P, L, S,
Греко-латинские квадраты. Латинский квадрат. Пусть имеются 3 фактора - P, L, S,
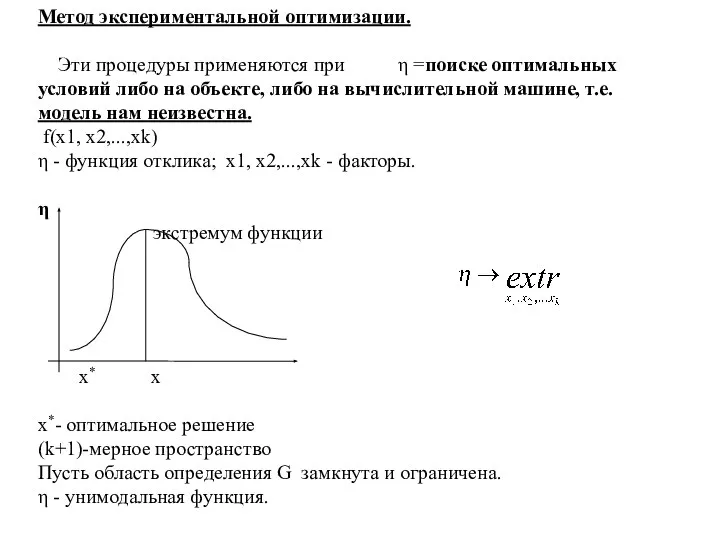
Метод экспериментальной оптимизации.
Эти процедуры применяются при η =поиске оптимальных условий
Метод экспериментальной оптимизации. Эти процедуры применяются при η =поиске оптимальных условий

Метод Бокса-Уилсона.
Идея метода заключается в использовании метода крутого восхождения в
Метод Бокса-Уилсона. Идея метода заключается в использовании метода крутого восхождения в
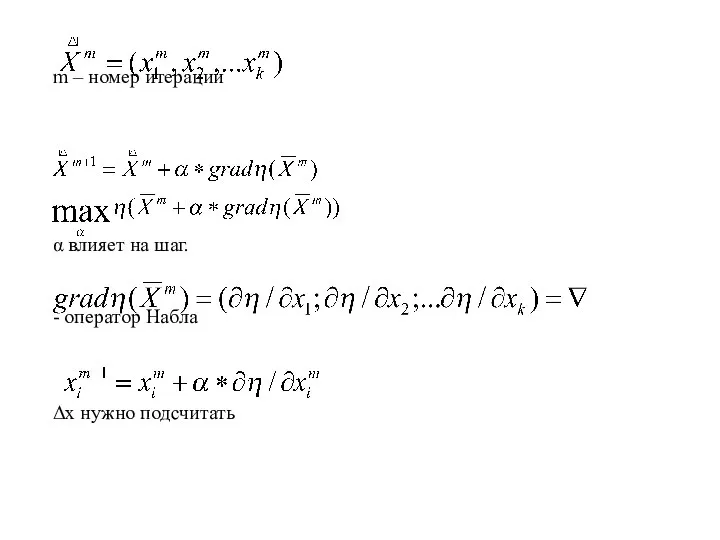
m – номер итерации
α влияет на шаг.
- оператор Набла
Δх нужно подсчитать
m – номер итерации
α влияет на шаг.
- оператор Набла
Δх нужно подсчитать
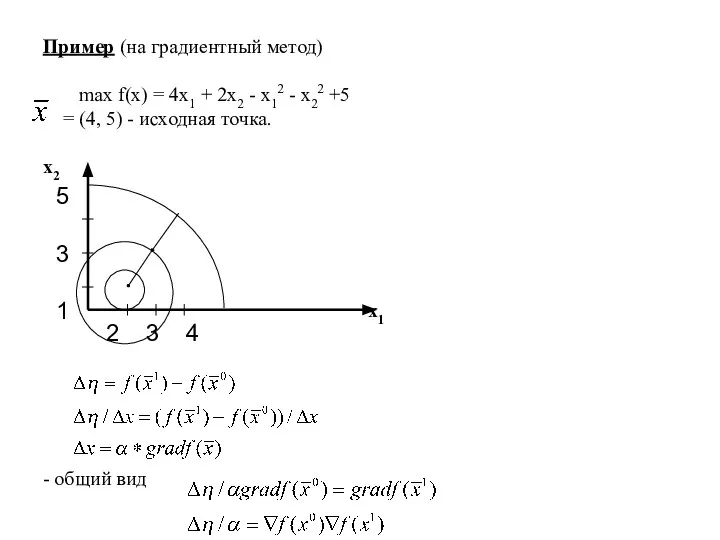
Пример (на градиентный метод)
max f(x) = 4x1 + 2x2 - x12
Пример (на градиентный метод) max f(x) = 4x1 + 2x2 - x12
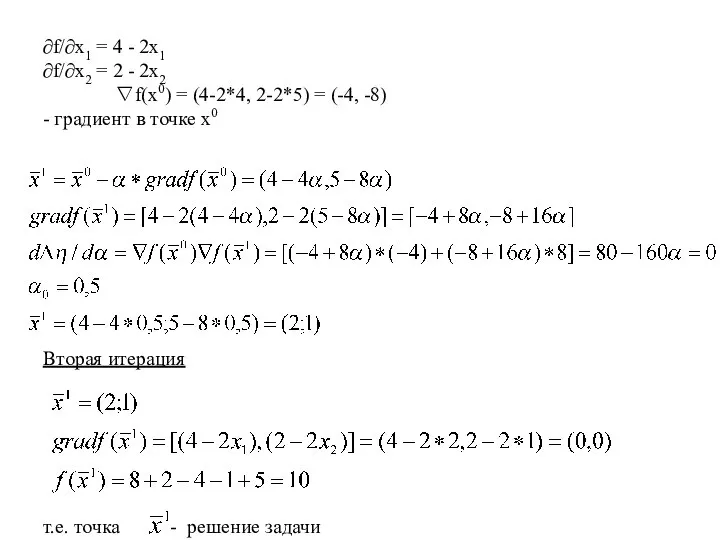
∂f/∂x1 = 4 - 2x1
∂f/∂x2 = 2 - 2x2
∇f(x0) = (4-2*4,
∂f/∂x1 = 4 - 2x1 ∂f/∂x2 = 2 - 2x2 ∇f(x0) = (4-2*4,
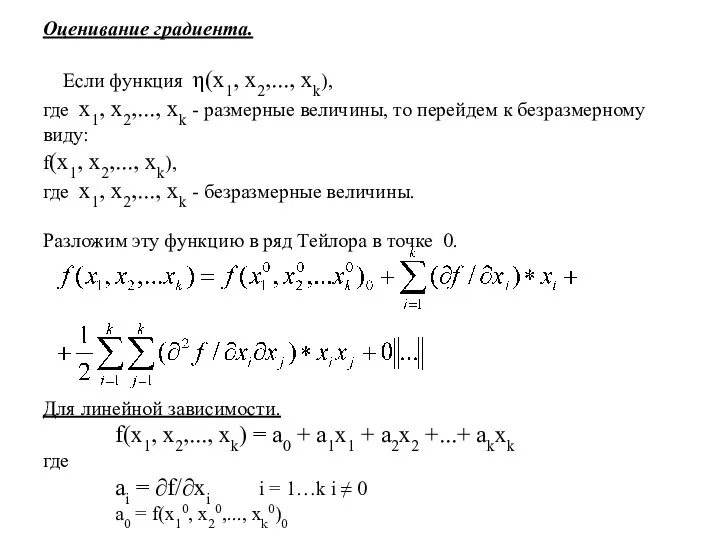
Оценивание градиента.
Если функция η(x1, x2,..., xk),
где x1, x2,..., xk
Оценивание градиента. Если функция η(x1, x2,..., xk), где x1, x2,..., xk

x2
x1
- из регрессионной модели - из разложения в ряд Тейлора
Проведя
x2 x1 - из регрессионной модели - из разложения в ряд Тейлора Проведя
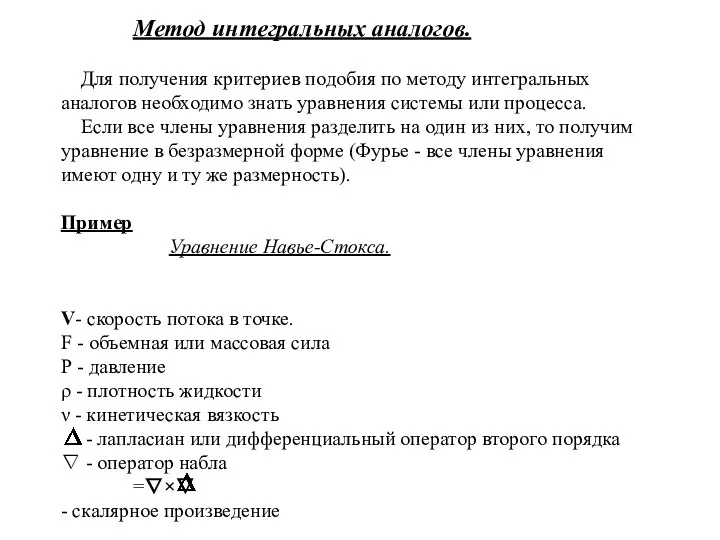
Метод интегральных аналогов.
Для получения критериев подобия по методу интегральных аналогов
Метод интегральных аналогов. Для получения критериев подобия по методу интегральных аналогов

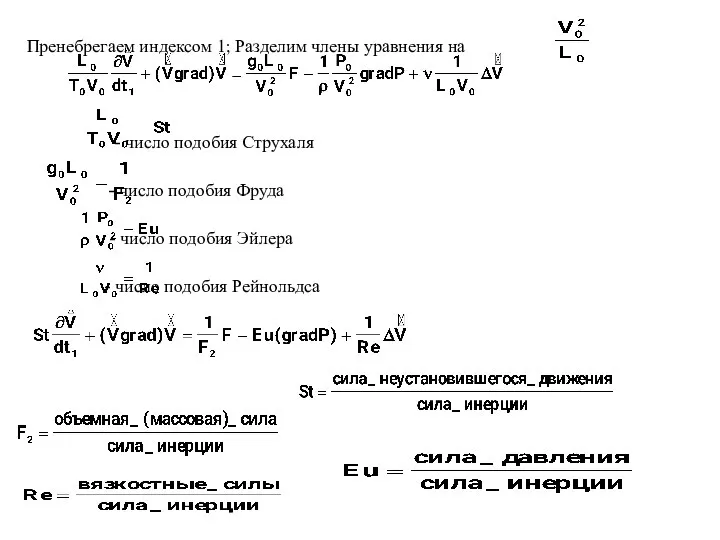
Пренебрегаем индексом 1; Разделим члены уравнения на - число подобия Струхаля
Пренебрегаем индексом 1; Разделим члены уравнения на - число подобия Струхаля
Фракталы.
Размерность Хаусдорфа-Безиковича.
Фракталы.
Размерность Хаусдорфа-Безиковича.
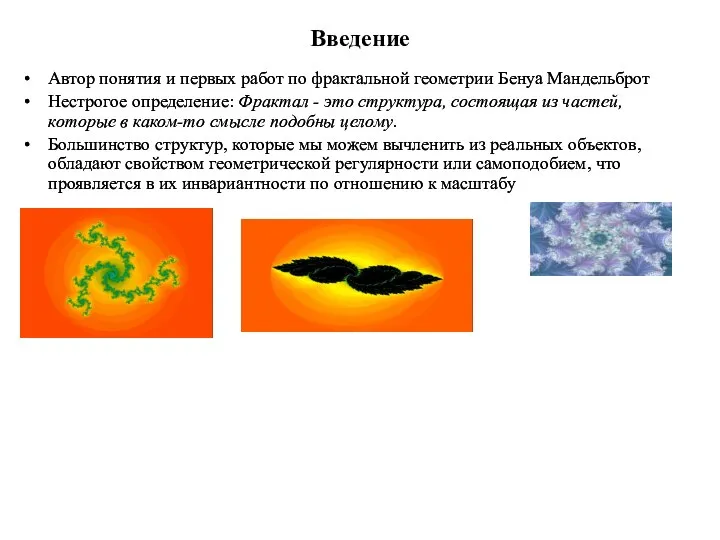
Введение
Автор понятия и первых работ по фрактальной геометрии Бенуа Мандельброт
Нестрогое определение:
Введение
Автор понятия и первых работ по фрактальной геометрии Бенуа Мандельброт
Нестрогое определение:
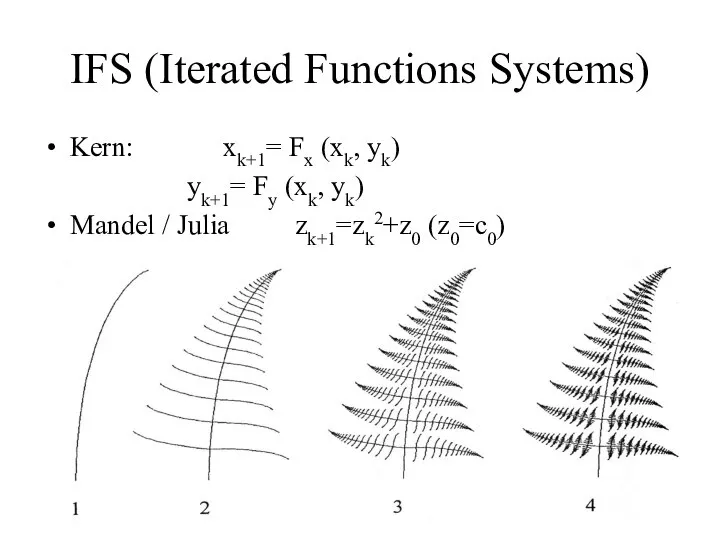
IFS (Iterated Functions Systems)
Kern: xk+1= Fx (xk, yk)
yk+1= Fy (xk, yk)
Mandel
IFS (Iterated Functions Systems)
Kern: xk+1= Fx (xk, yk)
yk+1= Fy (xk, yk)
Mandel

Примеры фракталов
Примеры фракталов
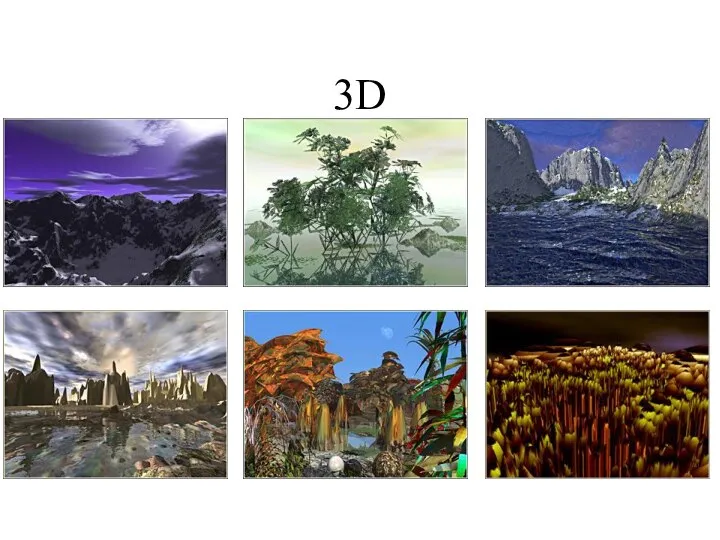
3D
3D
 Передача и использование электроэнергии
Передача и использование электроэнергии Самоиндукция. Индуктивность
Самоиндукция. Индуктивность Основные понятия и уравнения кинематики
Основные понятия и уравнения кинематики Електростатичне поле
Електростатичне поле  Пара сил. (Лекция 3)
Пара сил. (Лекция 3) Динамика кристаллической решетки
Динамика кристаллической решетки Аттестационная работа. «Электролиз. Применение электролиза»
Аттестационная работа. «Электролиз. Применение электролиза» Исследовательский проект Машина Голдберга Ловите привет!
Исследовательский проект Машина Голдберга Ловите привет! Неравновесные состояния и необратимые процессы. Броуновское движение
Неравновесные состояния и необратимые процессы. Броуновское движение Фотоэлектрические gреобразователи
Фотоэлектрические gреобразователи МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ О
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ О Радиоактивность. Строение атома
Радиоактивность. Строение атома klass_Magnitnoe_pole_Magnitnoe_pole_toka_Magnitnye_linii
klass_Magnitnoe_pole_Magnitnoe_pole_toka_Magnitnye_linii Давление на примере ЦПГ
Давление на примере ЦПГ Тепломассообмен. Теория подобия физических явлений. Числа подобия. Уравнения подобия
Тепломассообмен. Теория подобия физических явлений. Числа подобия. Уравнения подобия Электрическая дуга
Электрическая дуга Атомная физика
Атомная физика Аномальные свойства воды
Аномальные свойства воды Магнитное поле
Магнитное поле Новое состояние материи – кварк-глюонная плазма
Новое состояние материи – кварк-глюонная плазма Циклотрон
Циклотрон Презентация по физике "Электротехника" - скачать бесплатно
Презентация по физике "Электротехника" - скачать бесплатно Классификация способов обработки материалов потоками излучения
Классификация способов обработки материалов потоками излучения Презентация Ультрафиолетовые лучи
Презентация Ультрафиолетовые лучи  Расчет стержневых конструкций по предельному равновесию
Расчет стержневых конструкций по предельному равновесию Методы разделения белковых смесей. Хроматография
Методы разделения белковых смесей. Хроматография Творческий проект ученицы 9-а класса Симоновой Ольги. Учитель: Кенжина Н. М. Учитель информатики: Умнова Т.С.
Творческий проект ученицы 9-а класса Симоновой Ольги. Учитель: Кенжина Н. М. Учитель информатики: Умнова Т.С. Кристаллы. Образование кристаллов
Кристаллы. Образование кристаллов