- Типовые законы автоматического регулирования

Содержание
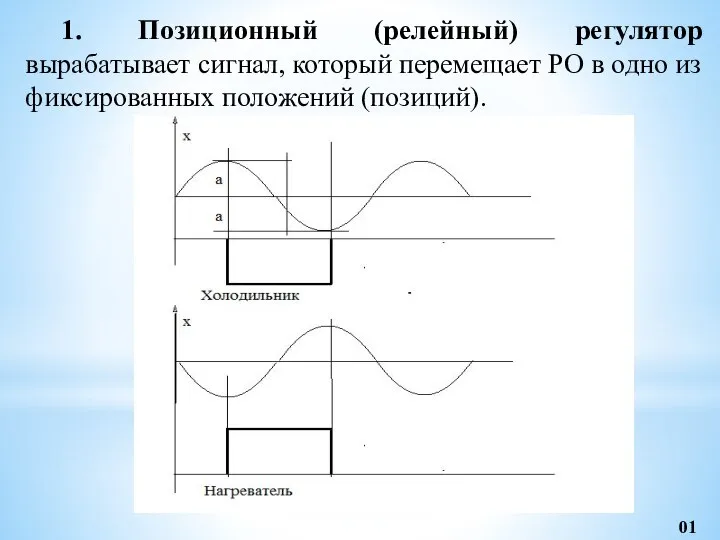
- 2. 01 1. Позиционный (релейный) регулятор вырабатывает сигнал, который перемещает РО в одно из фиксированных положений (позиций).
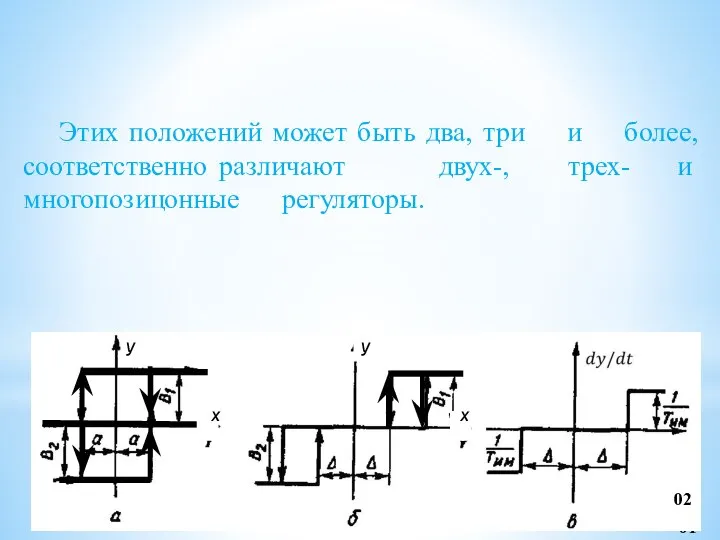
- 3. 01 y y x x 02 Этих положений может быть два, три и более, соответственно различают
- 4. Величина 2а определяет зону неоднозначности регулятора. При увеличении входной величины x (она же – выходная величина
- 5. Трехпозиционные регуляторы (рис. 1, б) в отличие от двухпозиционных кроме двух устойчивых положений — «больше» В1
- 6. 03
- 7. Устройство, которое воспринимает разность между текущим и заданным значениями регулируемой величины и преобразует ее в воздействие
- 8. С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает относительно медленные переходные процессы и
- 9. 04
- 10. 05
- 12. 06
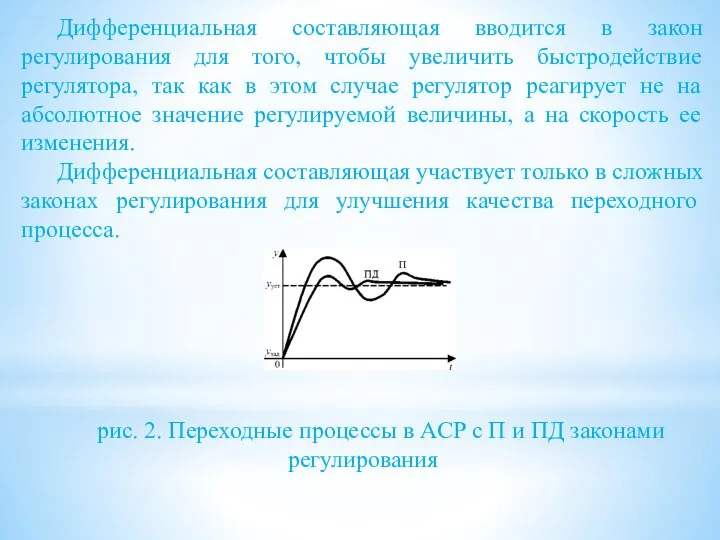
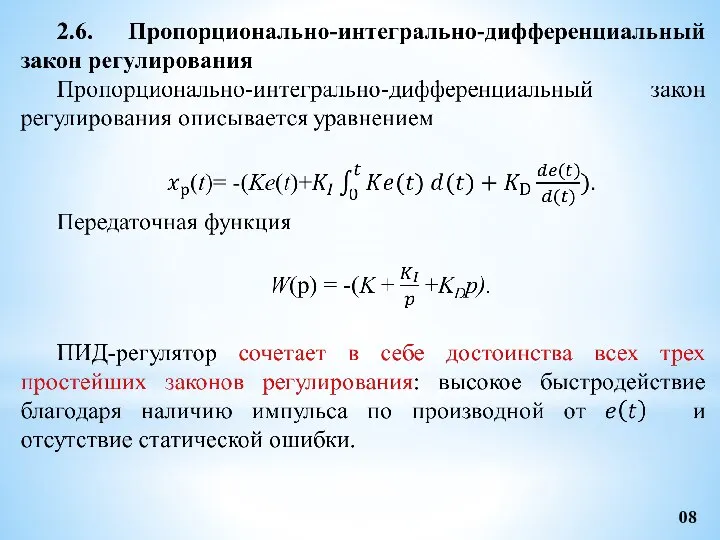
- 13. Дифференциальная составляющая вводится в закон регулирования для того, чтобы увеличить быстродействие регулятора, так как в этом
- 14. 07
- 15. 08
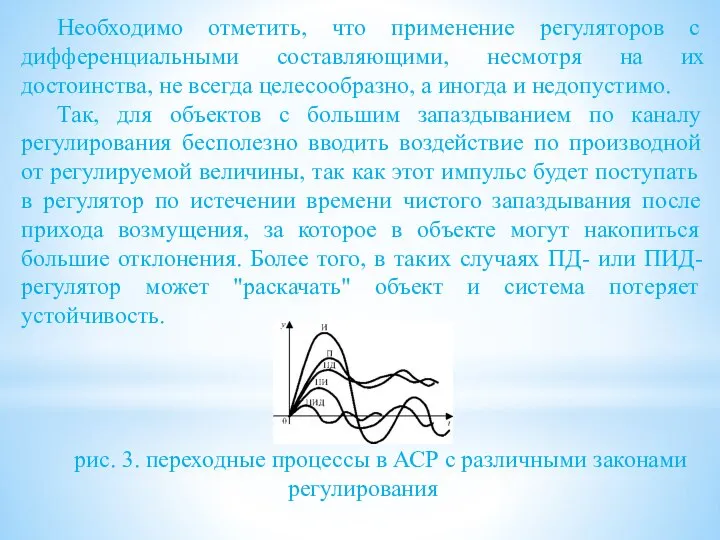
- 16. Необходимо отметить, что применение регуляторов с дифференциальными составляющими, несмотря на их достоинства, не всегда целесообразно, а
- 18. Скачать презентацию
01
1. Позиционный (релейный) регулятор вырабатывает сигнал, который перемещает РО в одно
01
1. Позиционный (релейный) регулятор вырабатывает сигнал, который перемещает РО в одно
01
y
y
x
x
02
Этих положений может быть два, три и более, соответственно различают двух-,
01
y
y
x
x
02
Этих положений может быть два, три и более, соответственно различают двух-,
Величина 2а определяет зону неоднозначности регулятора.
При увеличении входной величины x
Величина 2а определяет зону неоднозначности регулятора.
При увеличении входной величины x
Трехпозиционные регуляторы (рис. 1, б) в отличие от двухпозиционных кроме двух
Трехпозиционные регуляторы (рис. 1, б) в отличие от двухпозиционных кроме двух
03
03
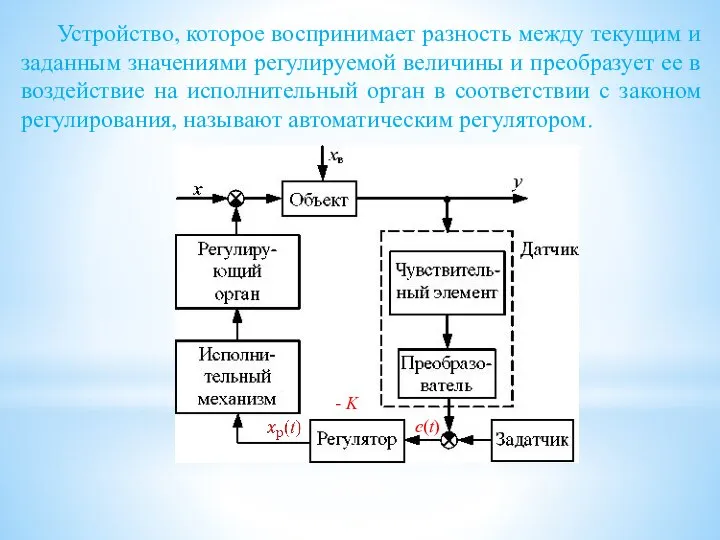
Устройство, которое воспринимает разность между текущим и заданным значениями регулируемой величины
Устройство, которое воспринимает разность между текущим и заданным значениями регулируемой величины
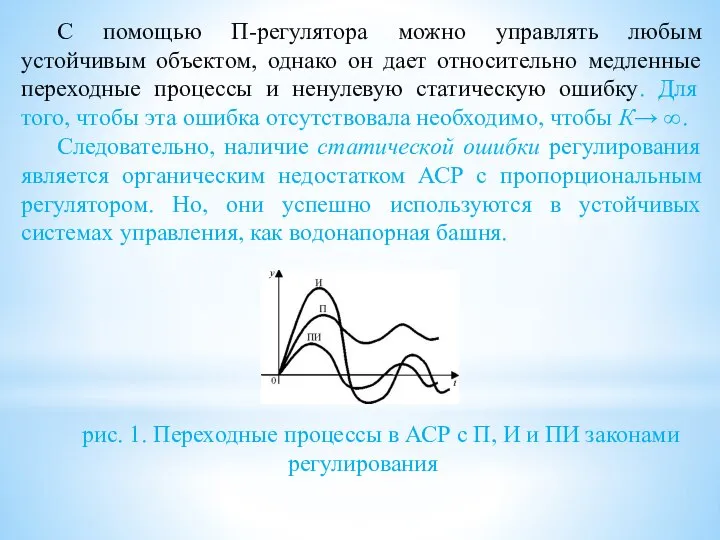
С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает
С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает
04
04
05
05

06
06
Дифференциальная составляющая вводится в закон регулирования для того, чтобы увеличить быстродействие
Дифференциальная составляющая вводится в закон регулирования для того, чтобы увеличить быстродействие
07
07
08
08
Необходимо отметить, что применение регуляторов с дифференциальными составляющими, несмотря на их
Необходимо отметить, что применение регуляторов с дифференциальными составляющими, несмотря на их
 СВОБОДНЫЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ. УСЛОВИЯ ВОЗНИКНОВЕНИЯ СВОБОДНЫХ КОЛЕБАНИЙ.
СВОБОДНЫЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ. УСЛОВИЯ ВОЗНИКНОВЕНИЯ СВОБОДНЫХ КОЛЕБАНИЙ. Изучение свойств волос – носителей информации о минеральном составе всего организма
Изучение свойств волос – носителей информации о минеральном составе всего организма Презентация Электробезопасность Опасности электрических систем
Презентация Электробезопасность Опасности электрических систем  Особенности САПР
Особенности САПР Двигатели летательных аппаратов
Двигатели летательных аппаратов Электронно-дырочный переход
Электронно-дырочный переход Использование достижений физики атомного ядра в медицине
Использование достижений физики атомного ядра в медицине Закон всемирного тяготения
Закон всемирного тяготения Проблемалық жағдай
Проблемалық жағдай Автоколебания. Условия возбуждения автоколебаний
Автоколебания. Условия возбуждения автоколебаний Презентация по физике "Свободное и вынужденное колебание тел" - скачать
Презентация по физике "Свободное и вынужденное колебание тел" - скачать 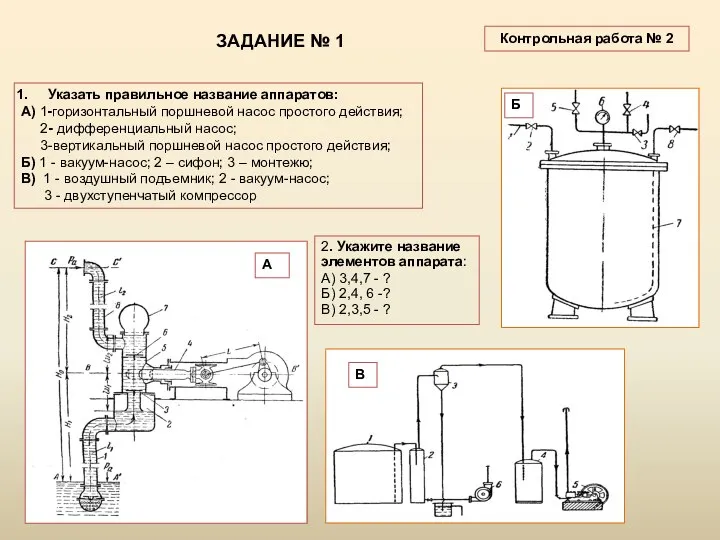 Указать правильное название аппаратов. Контрольная работа №2
Указать правильное название аппаратов. Контрольная работа №2 Электрическая цепь
Электрическая цепь Скорость движения жидкости как сплошной среды
Скорость движения жидкости как сплошной среды Сообщающиеся сосуды
Сообщающиеся сосуды Метод я́дерного магни́тного резона́нса
Метод я́дерного магни́тного резона́нса Механічні хвилі. Звук
Механічні хвилі. Звук  Зависимость силы тока от напряжения и сопротивления. Закон Ома для участка цепи
Зависимость силы тока от напряжения и сопротивления. Закон Ома для участка цепи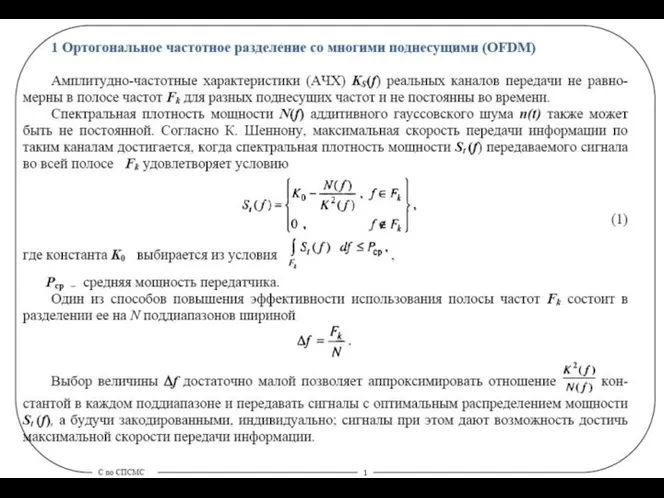 Ортогональное частотное разделение со многими поднесущими (OFDM)
Ортогональное частотное разделение со многими поднесущими (OFDM) Mathematical Modeling of Energy Efficiency
Mathematical Modeling of Energy Efficiency Планетарная (ядерная) модель атома Атом – микрочастица, состоящая из положительно заряженного ядра и окружающих его электронов
Планетарная (ядерная) модель атома Атом – микрочастица, состоящая из положительно заряженного ядра и окружающих его электронов Задачи с межпредметными связями
Задачи с межпредметными связями Презентация Электроизмерительные приборы
Презентация Электроизмерительные приборы  Механические колебания. Гармонические колебания. Дифференциальное уравнение гармонических колебаний материальной точки
Механические колебания. Гармонические колебания. Дифференциальное уравнение гармонических колебаний материальной точки Знакомство с ременной передачей
Знакомство с ременной передачей Презентация по физике "Электромагнитные явления" - скачать
Презентация по физике "Электромагнитные явления" - скачать  Секреты колебательного контура
Секреты колебательного контура Прорывные квантовые технологии в медицине, основанные на новых физических принципах действия
Прорывные квантовые технологии в медицине, основанные на новых физических принципах действия