- Искусственный интеллект

Содержание
- 2. Искусственный интеллект – компьютерная самообучаемая система, предназначенная для решения задач высокого класса сложности. Он способен решать
- 3. В самом широком смысле под ИИ понимается область информационных технологий, разрабатывающая машины (системы), наделённые основными возможностями
- 4. Исследования в области ИИ ведутся по двум направлениям: бионическое – попытки смоделировать с помощью искусственных систем
- 5. Свойства систем ИИ: внутренняя интерпретируемость – вместе с информацией в базе знаний представлены информационные структуры, позволяющие
- 6. В основу ИИ ложатся нейронные сети. ИИ имеет обширную историю, делящуюся на три этапа. Период прорыва
- 7. 1-й этап - «Прорыв» 1943-статья У.Маккалока и У.Питтса о нервной активности, в котором они сформулировали понятие
- 8. 1-й этап - «Прорыв» 1957-Ф.Розенблатт попытался создать систему, моделирующую человеческий глаз и его взаимодействие с мозгом,
- 9. 2-й этап – «Пессимизм и застой» 1.Нейронные сети не могли решать задачи, внешне весьма сходные с
- 10. 3 этап – «Оптимизм и развитие» 1974 г. - П. Вербосом разработан алгоритм обратного распространения ошибки,
- 11. 1975 г. - Фукусима представляет Когнитрон –нейронная самоорганизация, архитектурой похожая на строение зрительной коры. Обучается конкурентным
- 12. 1987 г. - Гроссберг создал адаптивную резонансную теорию. Сети и алгоритмы в ней сохраняют пластичность, необходимую
- 13. Искусственный интеллект в сельском хозяйстве Технологии искусственного интеллекта (ИИ) применяются в различных отраслях народного хозяйства, в
- 14. С момента начала технологической революции изменилось очень многое. Теперь практически на каждом этапе получения урожая присутствует
- 15. Посадка растений изменилась с простого крепления плантатора к трактору. Новые запрограммированные машины имеют географическую карту, где
- 16. Мониторинг посевов Дроны теперь заняты в сельском хозяйстве. Их задача состоит в том, чтобы обрабатывать больше
- 17. Усовершенствованные машины, такие как Robocrop, удаляют сорняки без химической обработки. Они распознают сорняки удаляют их с
- 18. Эти тракторы требуют не большого участия человека. Это автономные машины, которые управляются и работают самостоятельно. Эти
- 19. Теперь дроны применяются на пастбищах. Это отличается от вертолетов, используемых фермерами в Австралии. Дроны используются для
- 20. Есть как приятные так и отрицательные последствия с которыми придется столкнуться обществу с внедрением таких технологий
- 22. Скачать презентацию

Искусственный интеллект – компьютерная самообучаемая система, предназначенная для решения задач высокого
Искусственный интеллект – компьютерная самообучаемая система, предназначенная для решения задач высокого
В самом широком смысле под ИИ понимается область информационных технологий, разрабатывающая
В самом широком смысле под ИИ понимается область информационных технологий, разрабатывающая
Исследования в области ИИ ведутся по двум направлениям:
бионическое – попытки смоделировать
Исследования в области ИИ ведутся по двум направлениям:
бионическое – попытки смоделировать
Свойства систем ИИ:
внутренняя интерпретируемость – вместе с информацией в базе знаний
Свойства систем ИИ:
внутренняя интерпретируемость – вместе с информацией в базе знаний
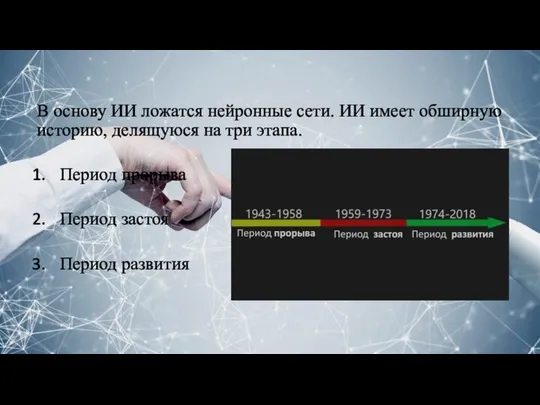
В основу ИИ ложатся нейронные сети. ИИ имеет обширную историю, делящуюся
В основу ИИ ложатся нейронные сети. ИИ имеет обширную историю, делящуюся
1-й этап - «Прорыв»
1943-статья У.Маккалока и У.Питтса о нервной активности,
1-й этап - «Прорыв»
1943-статья У.Маккалока и У.Питтса о нервной активности,
1-й этап - «Прорыв»
1957-Ф.Розенблатт попытался создать систему, моделирующую человеческий глаз
1-й этап - «Прорыв»
1957-Ф.Розенблатт попытался создать систему, моделирующую человеческий глаз
2-й этап – «Пессимизм и застой»
1.Нейронные сети не могли решать задачи,
2-й этап – «Пессимизм и застой»
1.Нейронные сети не могли решать задачи,
3 этап – «Оптимизм и развитие»
1974 г. - П. Вербосом разработан
3 этап – «Оптимизм и развитие»
1974 г. - П. Вербосом разработан
1975 г. - Фукусима представляет Когнитрон –нейронная самоорганизация, архитектурой похожая на
1975 г. - Фукусима представляет Когнитрон –нейронная самоорганизация, архитектурой похожая на
1987 г. - Гроссберг создал адаптивную резонансную теорию. Сети и алгоритмы
1987 г. - Гроссберг создал адаптивную резонансную теорию. Сети и алгоритмы
Искусственный интеллект в сельском хозяйстве
Технологии искусственного интеллекта (ИИ) применяются в различных
Искусственный интеллект в сельском хозяйстве
Технологии искусственного интеллекта (ИИ) применяются в различных

С момента начала технологической революции изменилось очень многое. Теперь практически на
С момента начала технологической революции изменилось очень многое. Теперь практически на

Посадка растений изменилась с простого крепления плантатора к трактору. Новые запрограммированные
Посадка растений изменилась с простого крепления плантатора к трактору. Новые запрограммированные

Мониторинг посевов
Дроны теперь заняты в сельском хозяйстве. Их задача состоит в
Мониторинг посевов
Дроны теперь заняты в сельском хозяйстве. Их задача состоит в

Усовершенствованные машины, такие как Robocrop, удаляют сорняки без химической обработки. Они
Усовершенствованные машины, такие как Robocrop, удаляют сорняки без химической обработки. Они
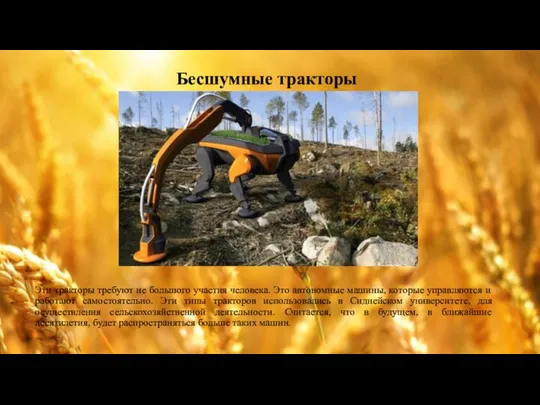
Эти тракторы требуют не большого участия человека. Это автономные машины, которые
Эти тракторы требуют не большого участия человека. Это автономные машины, которые
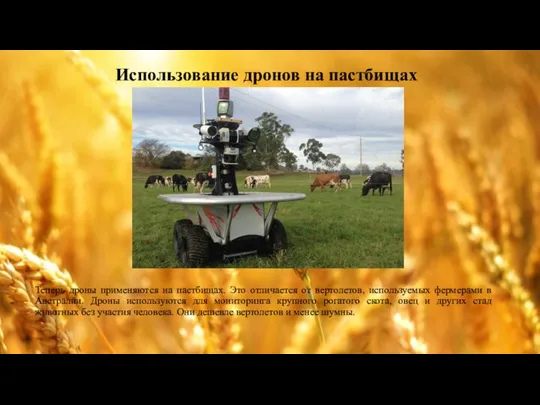
Теперь дроны применяются на пастбищах. Это отличается от вертолетов, используемых фермерами
Теперь дроны применяются на пастбищах. Это отличается от вертолетов, используемых фермерами
Есть как приятные так и отрицательные последствия с которыми придется столкнуться
Есть как приятные так и отрицательные последствия с которыми придется столкнуться
 ТЕХНОЛОГИЯ РАБОТЫ С ТАБЛИЦАМИ В БАЗАХ ДАННЫХ
ТЕХНОЛОГИЯ РАБОТЫ С ТАБЛИЦАМИ В БАЗАХ ДАННЫХ Построение филогенетических деревьев
Построение филогенетических деревьев Разработка сайтов
Разработка сайтов Система Help Desk
Система Help Desk Динамические массивы
Динамические массивы Режимы и способы обработки данных
Режимы и способы обработки данных Ведение аккаунта Instagram и контент-план
Ведение аккаунта Instagram и контент-план Режиссура мультимедийной истории
Режиссура мультимедийной истории Хранение, выборка и редактирование данных
Хранение, выборка и редактирование данных Устройство компьютера. Ребусы
Устройство компьютера. Ребусы Пространство имен RegularExpressions (C#)
Пространство имен RegularExpressions (C#) Информационная безопасность. Виды возможных угроз
Информационная безопасность. Виды возможных угроз Коммерческое предложение. Продвижение сайта
Коммерческое предложение. Продвижение сайта Информация и информационные процессы (10 класс)
Информация и информационные процессы (10 класс) Основы языка SQL
Основы языка SQL Система автоматизации проектирования Quartus II. Компиляция. Назначение контактов. Моделирование
Система автоматизации проектирования Quartus II. Компиляция. Назначение контактов. Моделирование КОМПЬЮТЕРНАЯ ГРАФИКА ОБРАБОТКА ГРАФИЧЕСКОЙ ИНФОРМАЦИИ
КОМПЬЮТЕРНАЯ ГРАФИКА ОБРАБОТКА ГРАФИЧЕСКОЙ ИНФОРМАЦИИ «Антивирусные программы» Учитель информатики Мурашова Татьяна Юрьевна
«Антивирусные программы» Учитель информатики Мурашова Татьяна Юрьевна Презентация на тему Носители информации
Презентация на тему Носители информации  Representation of data in computer systems
Representation of data in computer systems Android Notifications. Toast-уведомления. Оповещения
Android Notifications. Toast-уведомления. Оповещения Defect tracking
Defect tracking Поколения ЭВМ. Компьютеры 4, 5 и 6 поколения
Поколения ЭВМ. Компьютеры 4, 5 и 6 поколения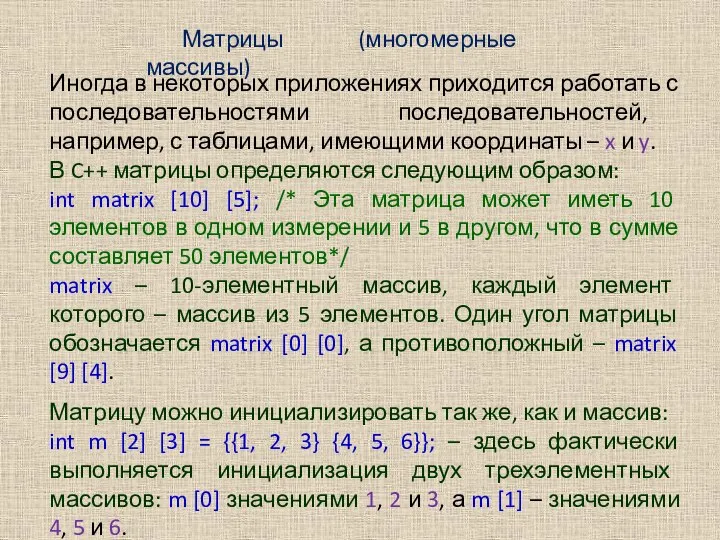 Матрицы (многомерные массивы)
Матрицы (многомерные массивы) Презентация "Алгоритм – как модель деятельности" - скачать презентации по Информатике
Презентация "Алгоритм – как модель деятельности" - скачать презентации по Информатике Количество информации. Единицы измерения количества информации
Количество информации. Единицы измерения количества информации Растровая и векторная графика Форматы графических файлов
Растровая и векторная графика Форматы графических файлов Programming_C._Practice_1
Programming_C._Practice_1