- Объезд препятствий на пути

Содержание
- 2. Ранее нами изучены алгоритмы для движения робота по линии. Релейный регулятор на 2 датчика Пропорциональный регулятор
- 3. Теперь на этой линии будет расположено препятствие – банка, которую робот может просто сдвинуть, но этого
- 4. Чтобы решить задачу с объездом банок, разобьём её на несколько простых задач – подпрограмм: Движение по
- 5. Так выглядит подпрограмма «По линии»:
- 6. Теперь вернемся в Диаграмму поведения робота, удалим всё, кроме блока «Начало программы», и создадим вторую подпрограмму
- 7. Для настройки на линию необходимо установить банку. Чтобы робот реагировал на банку и выполнял повороты как
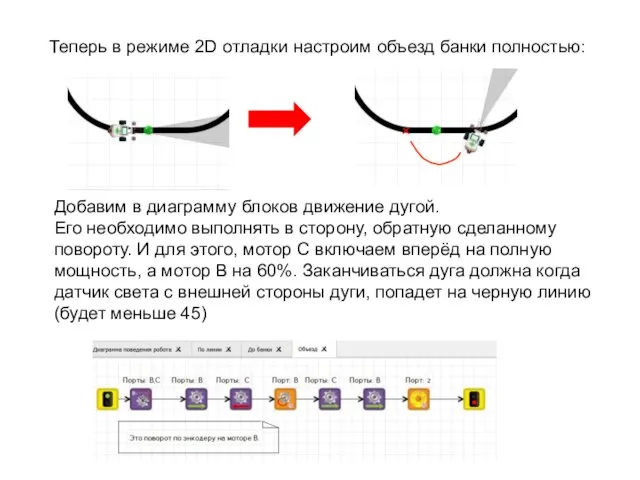
- 8. А Диаграмма поведения робота теперь будет выглядеть так: Объезд препятствия: Препятствие можно объехать разными способами: дугой,
- 9. Добавим в диаграмму блоков движение дугой. Его необходимо выполнять в сторону, обратную сделанному повороту. И для
- 10. Добавим в диаграмму блоков движение дугой. Его необходимо выполнять в сторону, обратную сделанному повороту. И для
- 12. Скачать презентацию
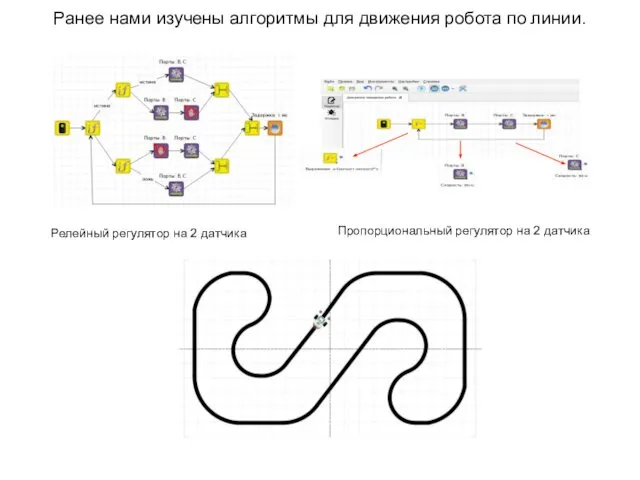
Ранее нами изучены алгоритмы для движения робота по линии.
Релейный регулятор на
Ранее нами изучены алгоритмы для движения робота по линии.
Релейный регулятор на
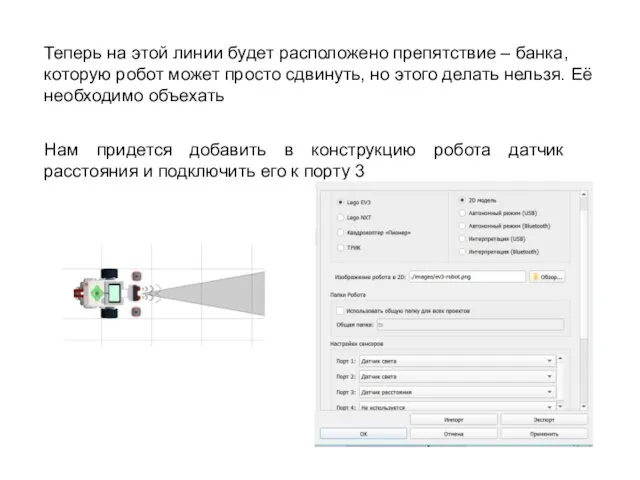
Теперь на этой линии будет расположено препятствие – банка, которую робот
Теперь на этой линии будет расположено препятствие – банка, которую робот
Чтобы решить задачу с объездом банок, разобьём её на несколько простых
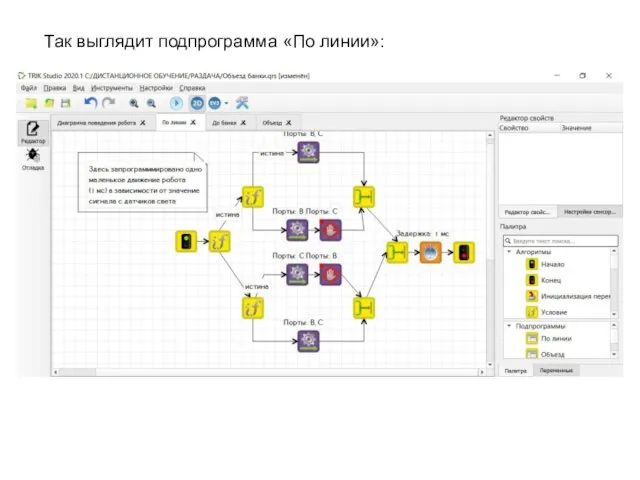
Так выглядит подпрограмма «По линии»:
Так выглядит подпрограмма «По линии»:
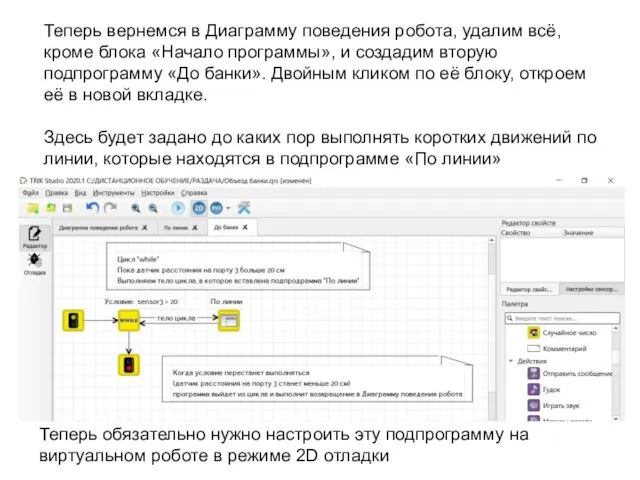
Теперь вернемся в Диаграмму поведения робота, удалим всё, кроме блока «Начало
Теперь вернемся в Диаграмму поведения робота, удалим всё, кроме блока «Начало

Для настройки на линию необходимо установить банку. Чтобы робот реагировал на
Для настройки на линию необходимо установить банку. Чтобы робот реагировал на

А Диаграмма поведения робота теперь будет выглядеть так:
Объезд препятствия:
Препятствие можно объехать
А Диаграмма поведения робота теперь будет выглядеть так:
Объезд препятствия:
Препятствие можно объехать
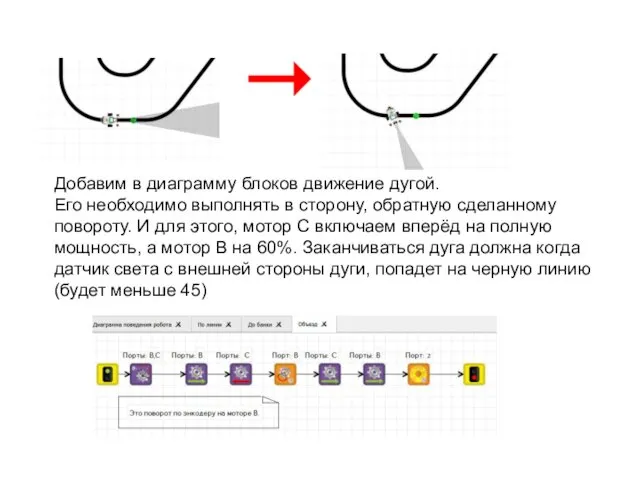
Добавим в диаграмму блоков движение дугой.
Его необходимо выполнять в сторону, обратную
Добавим в диаграмму блоков движение дугой.
Его необходимо выполнять в сторону, обратную
Добавим в диаграмму блоков движение дугой.
Его необходимо выполнять в сторону, обратную
Добавим в диаграмму блоков движение дугой.
Его необходимо выполнять в сторону, обратную
 Двоичная система счисления
Двоичная система счисления Намеченные планы 5 G ( Roadmap)
Намеченные планы 5 G ( Roadmap) Программирование линейных алгоритмов
Программирование линейных алгоритмов Реферальная ссылка. Новый инструмент для набора новичков через интернет
Реферальная ссылка. Новый инструмент для набора новичков через интернет Мультисенсор. Мультисенсорная система
Мультисенсор. Мультисенсорная система 3D-принтер. Принцип действия, виды, назначение
3D-принтер. Принцип действия, виды, назначение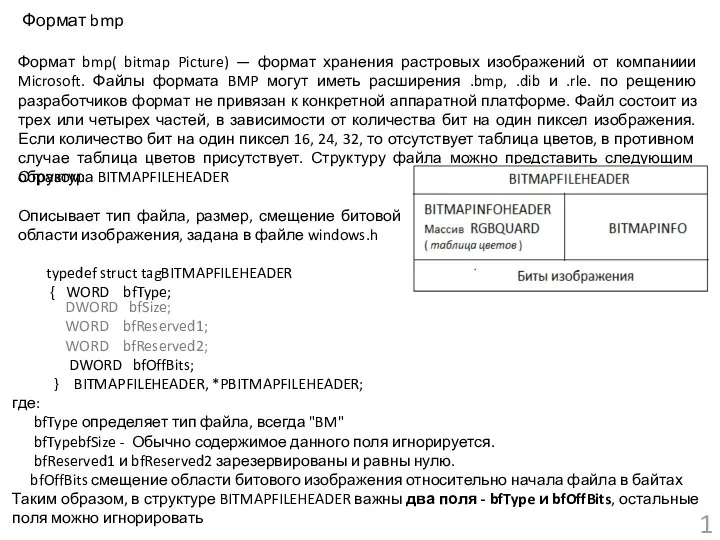 Формат bmp
Формат bmp Архитектура ОС. Многослойная и микроядерная архитектуры
Архитектура ОС. Многослойная и микроядерная архитектуры Электронная-цифровая подпись в информационных системах
Электронная-цифровая подпись в информационных системах Электронная цифровая подпись
Электронная цифровая подпись Правила и этапы создания сайта
Правила и этапы создания сайта СМИ. Как написать хорошую статью
СМИ. Как написать хорошую статью : Шифры замены
: Шифры замены Презентация "Алгоритм" - скачать презентации по Информатике
Презентация "Алгоритм" - скачать презентации по Информатике Применение метода монте-карло для моделирования теплопроводящих свойств композиционных материалов
Применение метода монте-карло для моделирования теплопроводящих свойств композиционных материалов Максимум возможностей. Реферальная ссылка
Максимум возможностей. Реферальная ссылка Глубокое системное программирование
Глубокое системное программирование Как защитить свой компьютер
Как защитить свой компьютер Персональный компьютер: устройство и назначение
Персональный компьютер: устройство и назначение Виды сервисов, обеспечивающих коммуникацию в Интернете, их преимущества и недостатки
Виды сервисов, обеспечивающих коммуникацию в Интернете, их преимущества и недостатки Systemy operacyjne. Wprowadzenie. Pojęcia podstawowe
Systemy operacyjne. Wprowadzenie. Pojęcia podstawowe Передумови виникнення напрямку. Інформаційна система
Передумови виникнення напрямку. Інформаційна система Графічний редактор Paint
Графічний редактор Paint Базы данных - 4
Базы данных - 4 Теорія алгоритмів
Теорія алгоритмів Информационно-аналитическое обеспечение для прогнозирования энергопотребления на основе ансамбля искусственных нейронных сетей
Информационно-аналитическое обеспечение для прогнозирования энергопотребления на основе ансамбля искусственных нейронных сетей Система управления реляционной базой данных Visual FoxPro. Лабораторная работа по дисциплине БД и ЭС
Система управления реляционной базой данных Visual FoxPro. Лабораторная работа по дисциплине БД и ЭС Телевидение Persik
Телевидение Persik