- Проецирование трехмерных объектов

Содержание
- 2. КЛАССИФИКАЦИЯ ПРОЕКЦИЙ
- 3. Определение В общем случае проекции преобразуют точки, заданные в системе координат размерностью n в точки системы
- 4. Основные элементы проекции: Центр проекции Проецирующие лучи (проекторы)- прямые Проекционная (картинная) плоскость плоские геометрические проекции
- 5. Плоские геометрические проекции центральные параллельные
- 6. Центральная проекция центр проекции находится на конечном расстоянии от проекционной плоскости
- 7. Параллельная проекция центр проекции удален на бесконечность
- 8. Одноточечная проекция Точка схода называется главной, если совокупность прямых параллельна одной из координатных осей
- 9. Основные виды проекций Плоские геометрические проекции Параллельные Ортографические Аксонометрические Изометрические Косоугольные Центральные
- 10. Вывод формул центральной перспективной проекции Расположение осей координат на экране
- 11. Системы координат
- 12. Плоскость экрана совпадает с проекционной k – расстояние от наблюдателя до проекционной плоскости А проецируется на
- 13. Определим координаты A’ Из подобия треугольников Ay Az N и yэ ON
- 14. точку наблюдения поместить в начало координат, проекционную плоскость на расстояние а
- 16. Буфер кадра (Frame buffer) буфер глубины или Z-буфер (Depth buffer), буфер цвета (Color buffer), накопительный буфер
- 17. Проверка глубины - это эффективная технология удаления скрытых поверхностей активизировать проверку глубины glEnable(GL_DEPTH_TEST); В программе glClear(GL_COLOR_BUFFER_BIT
- 18. ПРЕОБРАЗОВАНИЯ ТОЧЕК В РАЗНЫХ СИСТЕМАХ КООРДИНАТ
- 21. Масштабирование glScale (arg1, arg2, arg3) аргументы - коэффициенты масштабирования по каждой из осей
- 22. изменить положение точки наблюдения void gluLookAt (GLdouble eyex, GLdouble eyey, GLdouble eyez, GLdouble centerx, GLdouble centery,
- 23. Проекционные преобразования определяем отсекающий объем видимости Как сцена будет отображаться на экране монитора Какие объекты или
- 24. Параллельное проецирование в OpenGL
- 25. void glOrtho(GLdouble left, GLdouble right, GLdouble bottom, GLdouble top, GLdouble near, GLdouble far) void gluOrtho2D(GLdouble left,
- 26. Перспективные преобразования в OpenGL
- 27. void glFrustum(GLdouble left, GLdouble right, GLdouble bottom, GLdouble top, GLdouble near, GLdouble far); glMatrixMode(GL_PROJECTION); glLoadIdentity(); glFrustum(xmin,
- 29. void gluPerspective(GLdouble angley, GLdouble aspect, GLdouble znear, GLdouble zfar)
- 30. Область вывода void glViewPort(GLint x, GLint y, GLint width, GLint height) ox=x+width/2, oy=y+height/2 Пусть px=width, py=height,
- 32. Скачать презентацию
КЛАССИФИКАЦИЯ ПРОЕКЦИЙ
КЛАССИФИКАЦИЯ ПРОЕКЦИЙ

Определение
В общем случае проекции преобразуют точки, заданные в системе координат размерностью
Определение
В общем случае проекции преобразуют точки, заданные в системе координат размерностью

Основные элементы проекции:
Центр проекции
Проецирующие лучи (проекторы)- прямые
Проекционная (картинная) плоскость
плоские геометрические
Основные элементы проекции:
Центр проекции
Проецирующие лучи (проекторы)- прямые
Проекционная (картинная) плоскость
плоские геометрические

Плоские геометрические проекции
центральные
параллельные
Плоские геометрические проекции
центральные
параллельные
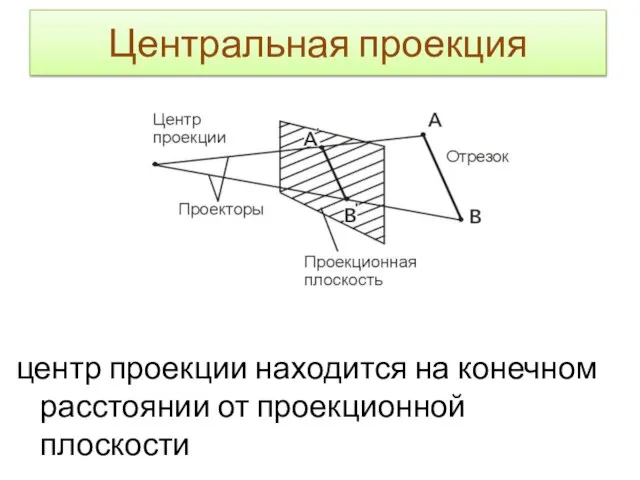
Центральная проекция
центр проекции находится на конечном расстоянии от проекционной плоскости
Центральная проекция
центр проекции находится на конечном расстоянии от проекционной плоскости
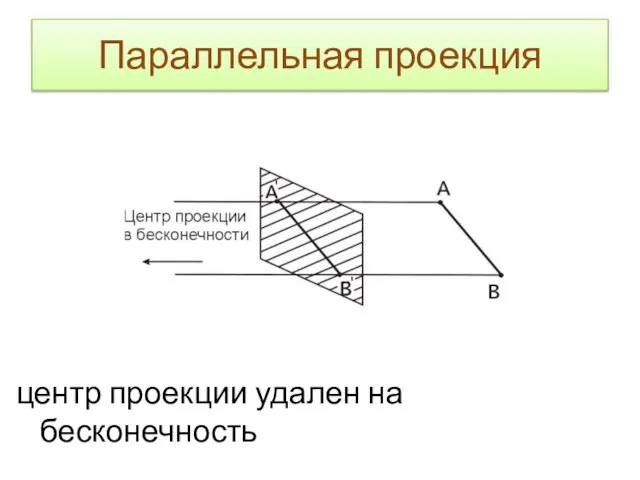
Параллельная проекция
центр проекции удален на бесконечность
Параллельная проекция
центр проекции удален на бесконечность
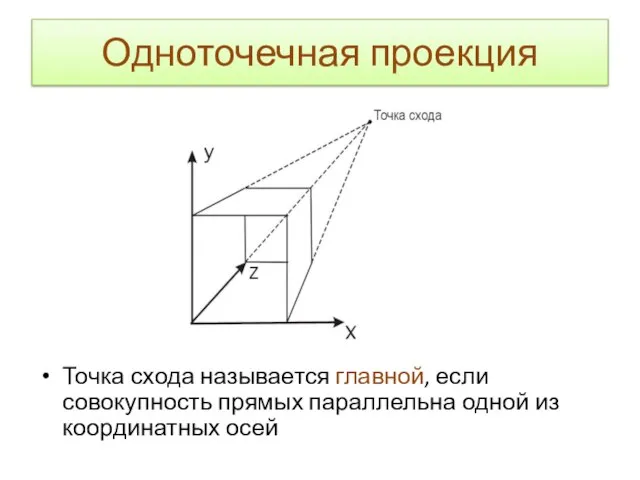
Одноточечная проекция
Точка схода называется главной, если совокупность прямых параллельна одной из
Одноточечная проекция
Точка схода называется главной, если совокупность прямых параллельна одной из

Основные виды проекций
Плоские геометрические проекции
Параллельные
Ортографические
Аксонометрические
Изометрические
Косоугольные
Центральные
Основные виды проекций
Плоские геометрические проекции
Параллельные
Ортографические
Аксонометрические
Изометрические
Косоугольные
Центральные
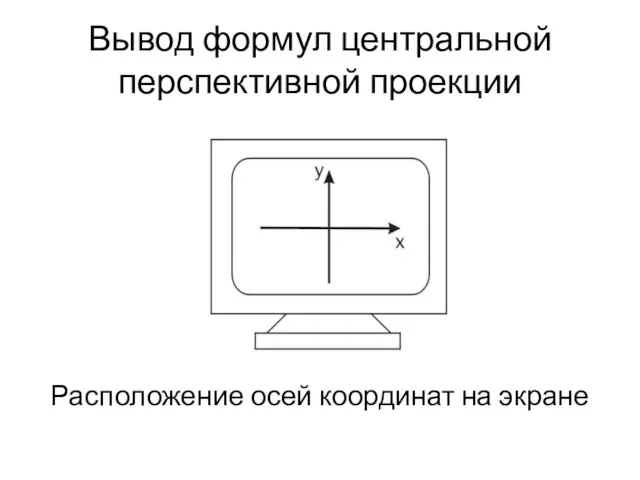
Вывод формул центральной перспективной проекции
Расположение осей координат на экране
Вывод формул центральной перспективной проекции
Расположение осей координат на экране

Системы координат
Системы координат

Плоскость экрана совпадает с проекционной
k – расстояние от наблюдателя до проекционной
Плоскость экрана совпадает с проекционной
k – расстояние от наблюдателя до проекционной

Определим координаты A’
Из подобия треугольников Ay Az N и yэ
Определим координаты A’
Из подобия треугольников Ay Az N и yэ

точку наблюдения поместить в начало координат,
проекционную плоскость на расстояние а
точку наблюдения поместить в начало координат,
проекционную плоскость на расстояние а


Буфер кадра (Frame buffer)
буфер глубины или Z-буфер (Depth buffer),
буфер цвета
Буфер кадра (Frame buffer)
буфер глубины или Z-буфер (Depth buffer),
буфер цвета

Проверка глубины - это эффективная технология удаления скрытых поверхностей
активизировать проверку глубины
glEnable(GL_DEPTH_TEST);
В
Проверка глубины - это эффективная технология удаления скрытых поверхностей
активизировать проверку глубины
glEnable(GL_DEPTH_TEST);
В

ПРЕОБРАЗОВАНИЯ ТОЧЕК В РАЗНЫХ СИСТЕМАХ КООРДИНАТ
ПРЕОБРАЗОВАНИЯ ТОЧЕК В РАЗНЫХ СИСТЕМАХ КООРДИНАТ



Масштабирование
glScale (arg1, arg2, arg3)
аргументы - коэффициенты масштабирования по каждой из осей
Масштабирование
glScale (arg1, arg2, arg3)
аргументы - коэффициенты масштабирования по каждой из осей

изменить положение точки наблюдения
void gluLookAt (GLdouble eyex, GLdouble eyey, GLdouble eyez,
GLdouble centerx,
изменить положение точки наблюдения
void gluLookAt (GLdouble eyex, GLdouble eyey, GLdouble eyez,
GLdouble centerx,

Проекционные преобразования
определяем отсекающий объем видимости
Как сцена будет отображаться на экране монитора
Какие объекты
Проекционные преобразования
определяем отсекающий объем видимости
Как сцена будет отображаться на экране монитора
Какие объекты

Параллельное проецирование в OpenGL
Параллельное проецирование в OpenGL

void glOrtho(GLdouble left, GLdouble right, GLdouble bottom, GLdouble top, GLdouble near, GLdouble
void glOrtho(GLdouble left, GLdouble right, GLdouble bottom, GLdouble top, GLdouble near, GLdouble
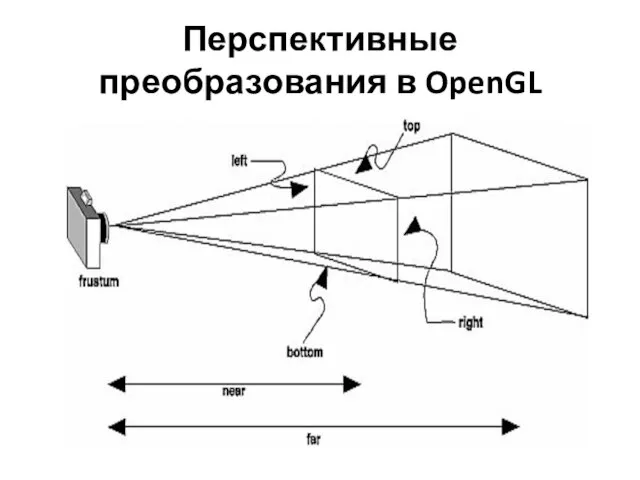
Перспективные преобразования в OpenGL
Перспективные преобразования в OpenGL

void glFrustum(GLdouble left, GLdouble right, GLdouble bottom, GLdouble top, GLdouble near,
void glFrustum(GLdouble left, GLdouble right, GLdouble bottom, GLdouble top, GLdouble near,


void gluPerspective(GLdouble angley, GLdouble aspect, GLdouble znear, GLdouble zfar)
void gluPerspective(GLdouble angley, GLdouble aspect, GLdouble znear, GLdouble zfar)

Область вывода
void glViewPort(GLint x, GLint y, GLint width, GLint height)
ox=x+width/2, oy=y+height/2
Пусть
Область вывода
void glViewPort(GLint x, GLint y, GLint width, GLint height)
ox=x+width/2, oy=y+height/2
Пусть
 Контент. Различные виды контента
Контент. Различные виды контента Комп'ютерна графіка
Комп'ютерна графіка Проекные технологии. X-Designer
Проекные технологии. X-Designer Разработка запросов к базе данных
Разработка запросов к базе данных Модели жизненного цикла
Модели жизненного цикла Фреймворк Laravel
Фреймворк Laravel Презентация по ин-е
Презентация по ин-е Классификация программного обеспечения
Классификация программного обеспечения Серверы приложений, Web-серверы, Web-службы
Серверы приложений, Web-серверы, Web-службы Ременное соединение
Ременное соединение Презентация "Проблемы развития и освоения программной инженерии" - скачать презентации по Информатике
Презентация "Проблемы развития и освоения программной инженерии" - скачать презентации по Информатике Разработка интерфейса пользователя игрового сервера с дополнением datebase
Разработка интерфейса пользователя игрового сервера с дополнением datebase Социальная журналистика, формирование навыка написания эссе
Социальная журналистика, формирование навыка написания эссе Big Data. Эксгумация больших данных
Big Data. Эксгумация больших данных Алгоритмы планирования
Алгоритмы планирования Обоснование внедрения инновационных технологий на отраслевом предприятии
Обоснование внедрения инновационных технологий на отраслевом предприятии Стеки. Области применения стека
Стеки. Области применения стека Интернет-магазин Лавка счастья
Интернет-магазин Лавка счастья Построение диаграмм и графиков MS EXCEL 2007
Построение диаграмм и графиков MS EXCEL 2007 Алгоритмы типа ветвление
Алгоритмы типа ветвление Оnline системы управления библиографической информацией в помощь научному и учебному процессу
Оnline системы управления библиографической информацией в помощь научному и учебному процессу Сервис аренды инфраструктуры в облаке
Сервис аренды инфраструктуры в облаке Оформление кредита
Оформление кредита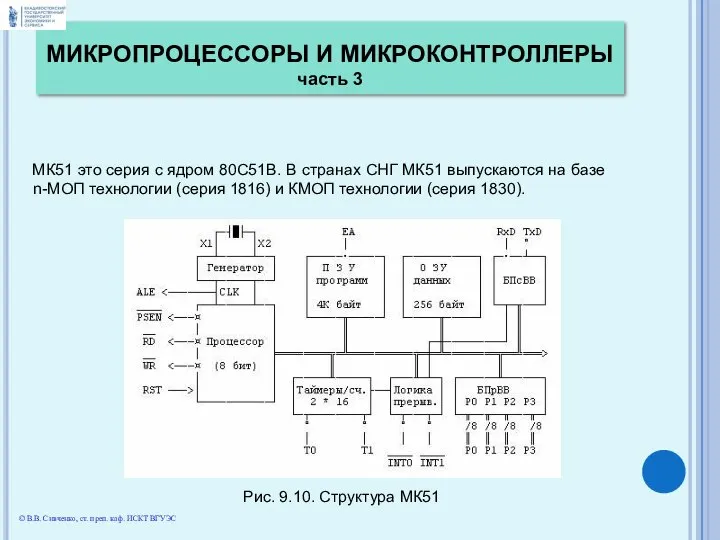 ОДНОКРИСТАЛЬНЫЕ МИКРОЭВМ ТИПА МК51 МК51 это серия с ядром 80С51В. В странах СНГ МК51 выпускаются на базе n-МОП технологии (серия 1816)
ОДНОКРИСТАЛЬНЫЕ МИКРОЭВМ ТИПА МК51 МК51 это серия с ядром 80С51В. В странах СНГ МК51 выпускаются на базе n-МОП технологии (серия 1816)  Skype. Программа интернет- телефония
Skype. Программа интернет- телефония Презентация "Базы данных и информационные системы. Основные понятия" - скачать презентации по Информатике
Презентация "Базы данных и информационные системы. Основные понятия" - скачать презентации по Информатике Моделирование окружающего мира
Моделирование окружающего мира Интернет-разведчик 1.0. Урок 6
Интернет-разведчик 1.0. Урок 6