- Трехмерная графика

Содержание
- 2. Ожидаемые вопросы: Много☺
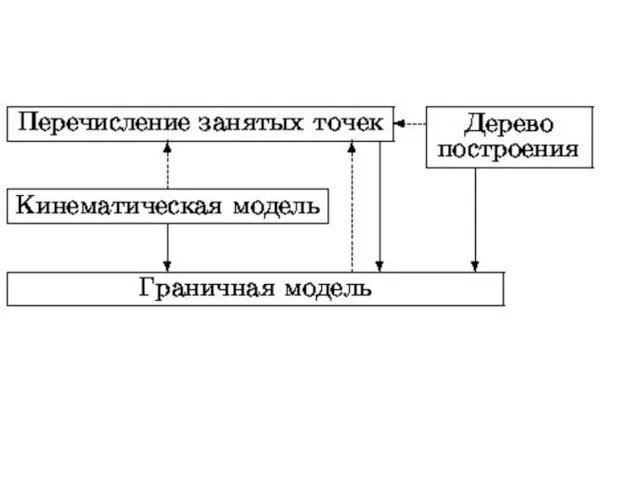
- 3. Типы 3D моделей Можно выделить два основных типа представлений 3D моделей: · граничное, когда в модели
- 5. Используются две основных разновидности способов представления поверхностей тела: · представление в виде набора вершин, ребер и
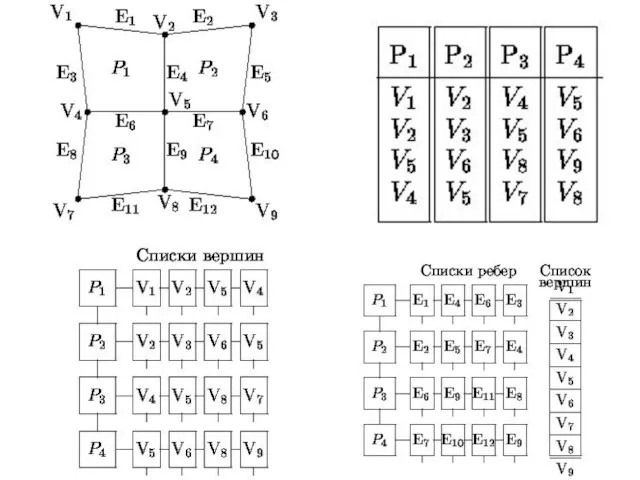
- 6. Полигональная сетка представляет собой набор вершин, ребер и плоских многоугольников. Вершины соединяются ребрами. Многоугольники рассматриваются либо
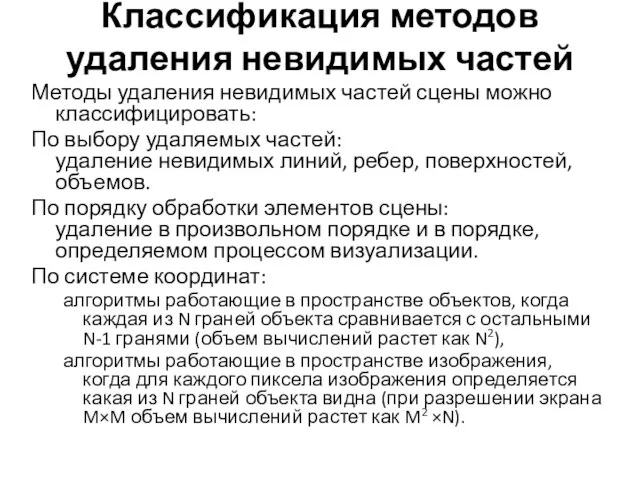
- 8. Классификация методов удаления невидимых частей Методы удаления невидимых частей сцены можно классифицировать: По выбору удаляемых частей:
- 9. Алгоритмы удаления линий Применение - векторные устройства. Могут применяться и в растровых для ускорения процесса визуализации,
- 10. Алгоритм удаления поверхностей с Z-буфером
- 11. Если известно уравнение плоскости, в которой лежит обрабатываемый многоугольник, то можно обойтись без хранения Z-координат вершин.
- 12. Найдем приращение Z-координаты пиксела при шаге по X на dx, помня, что Y очередной обрабатываемой строки
- 13. Общая схема Инициализировать кадровый и Z-буфера. Кадровый буфер закрашивается фоном. Z-буфер закрашивается минимальным значением Z. Выполнить
- 14. Построчный алгоритм с Z-буфером Рассмотрим теперь алгоритм с Z-буфером размером в одну строку, который представляет собой
- 15. Построчный алгоритм Уоткинса В алгоритмах построчного сканирования результирующее изображение генерируется построчно причем, используется связность соседних растровых
- 16. Алгоритм трассировки лучей Удаление невидимых (скрытых) поверхностей в алгоритме трассировки лучей выполняется следующим образом: · сцена
- 17. Ясно, что наиболее важная часть алгоритма - процедура определения пересечения, которая в принципе выполняется Rx×Ry×N раз
- 19. При использовании сферической оболочки для определения пересечения луча со сферой достаточно сосчитать расстояние от луча до
- 20. Минимальное расстояние от точки центра сферы P0(x0,y0,z0) до луча равно: d2 = (x-x0)2 + (y-y0)2 +
- 21. РЕАЛИСТИЧНОЕ ПРЕДСТАВЛЕНИЕ СЦЕН
- 22. Где нужен реализм: · в конструировании, · в архитектуре, · в биологии и медицине, · в
- 23. Основные направления: · синтез реалистичных изображений, · реалистическое оживление синтезированных объектов. С точки зрения приложений в
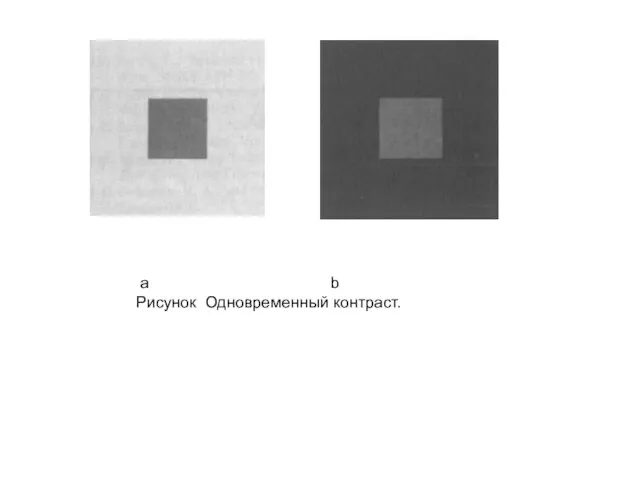
- 24. a b Рисунок Одновременный контраст.
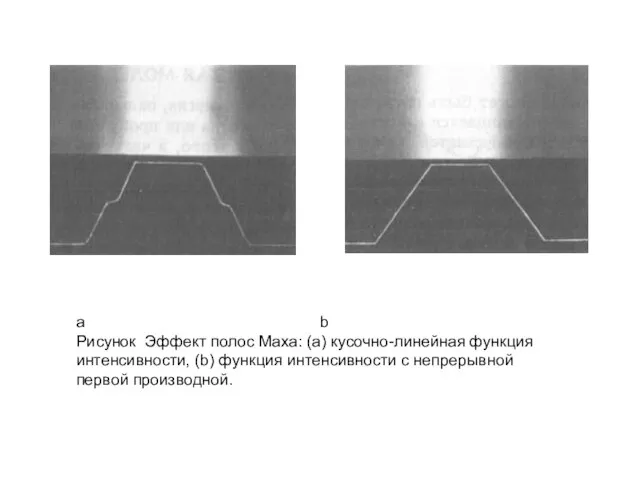
- 25. a b Рисунок Эффект полос Маха: (а) кусочно-линейная функция интенсивности, (b) функция интенсивности с непрерывной первой
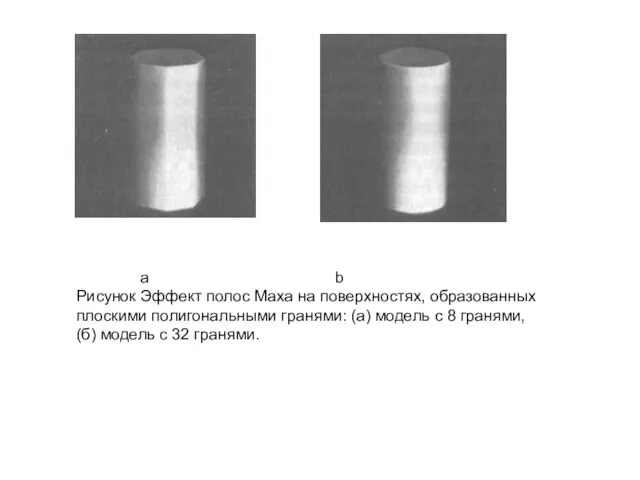
- 26. a b Рисунок Эффект полос Маха на поверхностях, образованных плоскими полигональными гранями: (а) модель с 8
- 27. Простая модель освещенности Свет точечного источника отражается от идеального рассеивателя по закону косинусов Ламберта: интенсивность отраженного
- 28. Поверхность предметов, изображенных при помощи простой модели освещения с ламбертовым диффузным отражением, выглядит блеклой и матовой.
- 31. Механизм диффузного и зеркального отражения света Диффузное отражение света точечного источника от идеального рассеивателя определяется по
- 32. В реальных сценах, кроме света от точечных источников, присутствует и рассеянный свет, который упрощенно учитывается с
- 33. Свет, отраженный от идеального зеркала, виден только если угол между направлениями наблюдения и отражения равен нулю.
- 34. Суммарная модель освещения имеет вид: I = Ir ·Pr + Ip d+K(Pd ·cos(f) + W(l, f)
- 35. Модели закраски Существует три основных способа закраски многоугольников: однотонная закраска, закраска с интерполяцией интенсивности и закраска
- 36. При однотонной закраске предполагается, что и источник света и наблюдатель находятся в бесконечности, поэтому произведения L·N
- 37. В методе закраски с интерполяцией интенсивности (метод Гуро) нормали в вершинах многоугольников вычисляются как результат усреднения
- 38. В методе закраски с интерполяцией нормали (метод Фонга) значение нормали вдоль строки интерполируется между значениями нормалей
- 39. Прозрачность Суммарная закраска определяется следующим образом: I = k·Iб + (1-k)·Iд, где 0 Ј k Ј
- 40. Тени Простой способ определения объектов, попавших в тень и, следовательно, неосвещенных, аналогичен алгоритму удаления невидимых поверхностей:
- 41. Фактура Решение в лоб - представление в виде соответствующего (очень большого) количества многоугольников мало приемлемо. Более
- 42. Трассировка лучей Метод трассировки лучей используется не только для удаления невидимых частей, но, в основном, для
- 43. Тест Что такое компьютерная графика? Какие цветовые модели Вам известны? Каково условие пересечения двух прямых? Какие
- 44. Вопросы? Предложения?
- 46. Скачать презентацию
Ожидаемые вопросы:
Много☺
Ожидаемые вопросы:
Много☺
Типы 3D моделей
Можно выделить два основных типа представлений 3D моделей:
·
Типы 3D моделей
Можно выделить два основных типа представлений 3D моделей:
·
Используются две основных разновидности способов представления поверхностей тела:
· представление в
Используются две основных разновидности способов представления поверхностей тела:
· представление в
Полигональная сетка представляет собой набор вершин, ребер и плоских многоугольников. Вершины
Полигональная сетка представляет собой набор вершин, ребер и плоских многоугольников. Вершины
Классификация методов удаления невидимых частей
Методы удаления невидимых частей сцены можно классифицировать:
Классификация методов удаления невидимых частей
Методы удаления невидимых частей сцены можно классифицировать:
Алгоритмы удаления линий
Применение - векторные устройства. Могут применяться и в растровых
Алгоритмы удаления линий
Применение - векторные устройства. Могут применяться и в растровых
Алгоритм удаления поверхностей с Z-буфером
Алгоритм удаления поверхностей с Z-буфером
Если известно уравнение плоскости, в которой лежит обрабатываемый многоугольник, то можно
Если известно уравнение плоскости, в которой лежит обрабатываемый многоугольник, то можно
Найдем приращение Z-координаты пиксела при шаге по X на dx, помня,
Найдем приращение Z-координаты пиксела при шаге по X на dx, помня,
Общая схема
Инициализировать кадровый и Z-буфера. Кадровый буфер закрашивается фоном. Z-буфер закрашивается
Общая схема
Инициализировать кадровый и Z-буфера. Кадровый буфер закрашивается фоном. Z-буфер закрашивается
Построчный алгоритм с Z-буфером
Рассмотрим теперь алгоритм с Z-буфером размером в одну
Построчный алгоритм с Z-буфером
Рассмотрим теперь алгоритм с Z-буфером размером в одну
Построчный алгоритм Уоткинса
В алгоритмах построчного сканирования результирующее изображение генерируется построчно причем,
Построчный алгоритм Уоткинса
В алгоритмах построчного сканирования результирующее изображение генерируется построчно причем,
Алгоритм трассировки лучей
Удаление невидимых (скрытых) поверхностей в алгоритме трассировки лучей выполняется
Алгоритм трассировки лучей
Удаление невидимых (скрытых) поверхностей в алгоритме трассировки лучей выполняется
Ясно, что наиболее важная часть алгоритма - процедура определения пересечения, которая
Ясно, что наиболее важная часть алгоритма - процедура определения пересечения, которая
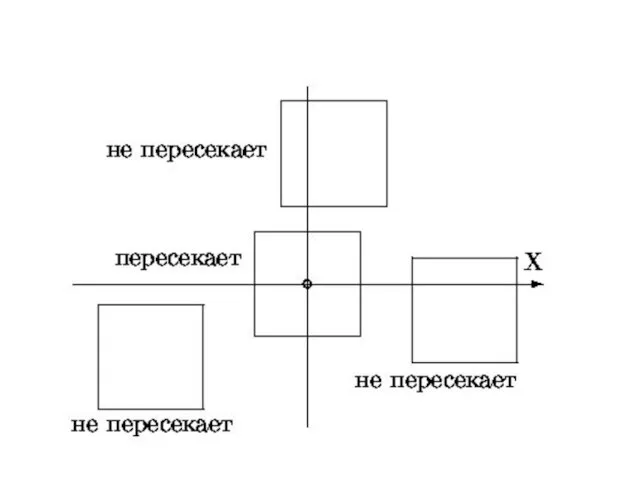
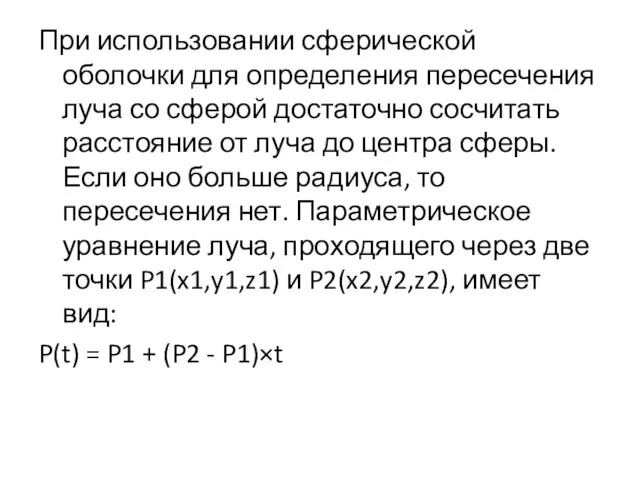
При использовании сферической оболочки для определения пересечения луча со сферой достаточно
При использовании сферической оболочки для определения пересечения луча со сферой достаточно
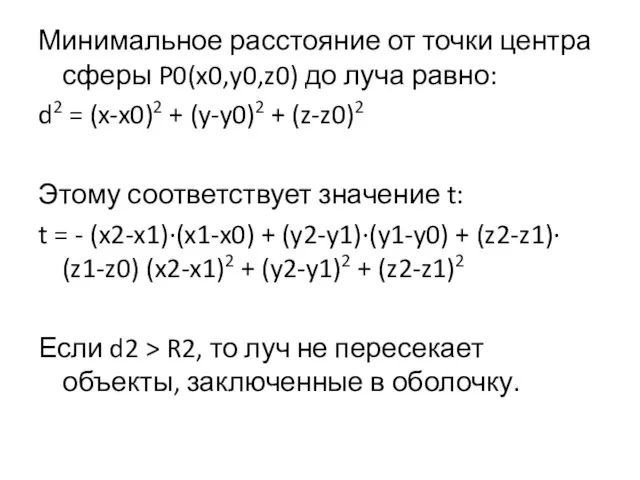
Минимальное расстояние от точки центра сферы P0(x0,y0,z0) до луча равно:
d2
Минимальное расстояние от точки центра сферы P0(x0,y0,z0) до луча равно:
d2

РЕАЛИСТИЧНОЕ ПРЕДСТАВЛЕНИЕ СЦЕН
РЕАЛИСТИЧНОЕ ПРЕДСТАВЛЕНИЕ СЦЕН
Где нужен реализм:
· в конструировании,
· в архитектуре,
· в биологии и медицине,
· в науке (компьютерное моделирование),
· в
Где нужен реализм: · в конструировании, · в архитектуре, · в биологии и медицине, · в науке (компьютерное моделирование), · в
Основные направления:
· синтез реалистичных изображений,
· реалистическое оживление синтезированных объектов.
С точки зрения приложений
Основные направления:
· синтез реалистичных изображений,
· реалистическое оживление синтезированных объектов.
С точки зрения приложений
a b
Рисунок Одновременный контраст.
a b
Рисунок Одновременный контраст.
a b
Рисунок Эффект полос Маха: (а) кусочно-линейная функция интенсивности, (b) функция
Рисунок Эффект полос Маха: (а) кусочно-линейная функция интенсивности, (b) функция
a b
Рисунок Эффект полос Маха на поверхностях, образованных плоскими полигональными гранями:
Рисунок Эффект полос Маха на поверхностях, образованных плоскими полигональными гранями:

Простая модель освещенности
Свет точечного источника отражается от идеального рассеивателя по закону
Простая модель освещенности
Свет точечного источника отражается от идеального рассеивателя по закону
Поверхность предметов, изображенных при помощи простой модели освещения с ламбертовым диффузным
Поверхность предметов, изображенных при помощи простой модели освещения с ламбертовым диффузным
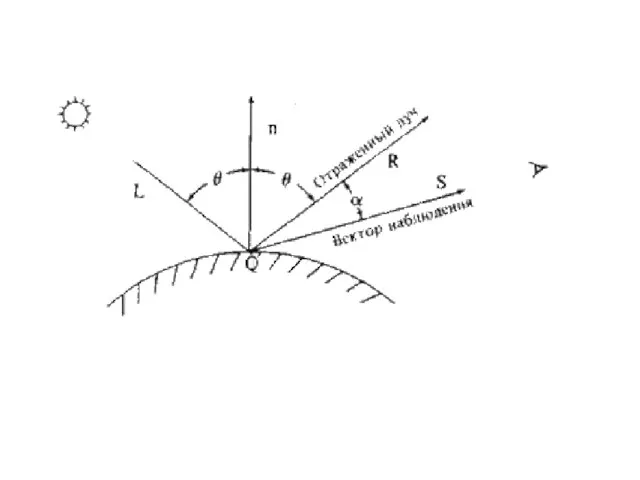
Механизм диффузного и зеркального отражения света
Диффузное отражение света точечного источника от
Механизм диффузного и зеркального отражения света
Диффузное отражение света точечного источника от
В реальных сценах, кроме света от точечных источников, присутствует и рассеянный
В реальных сценах, кроме света от точечных источников, присутствует и рассеянный
Свет, отраженный от идеального зеркала, виден только если угол между направлениями
Свет, отраженный от идеального зеркала, виден только если угол между направлениями
Суммарная модель освещения имеет вид:
I = Ir ·Pr + Ip
Суммарная модель освещения имеет вид:
I = Ir ·Pr + Ip
Модели закраски
Существует три основных способа закраски многоугольников: однотонная закраска, закраска с
Модели закраски
Существует три основных способа закраски многоугольников: однотонная закраска, закраска с
При однотонной закраске предполагается, что и источник света и наблюдатель находятся
При однотонной закраске предполагается, что и источник света и наблюдатель находятся
В методе закраски с интерполяцией интенсивности (метод Гуро) нормали в вершинах
В методе закраски с интерполяцией интенсивности (метод Гуро) нормали в вершинах
В методе закраски с интерполяцией нормали (метод Фонга) значение нормали вдоль
В методе закраски с интерполяцией нормали (метод Фонга) значение нормали вдоль
Прозрачность
Суммарная закраска определяется следующим образом:
I = k·Iб + (1-k)·Iд, где
Прозрачность
Суммарная закраска определяется следующим образом:
I = k·Iб + (1-k)·Iд, где
Тени
Простой способ определения объектов, попавших в тень и, следовательно, неосвещенных, аналогичен
Тени
Простой способ определения объектов, попавших в тень и, следовательно, неосвещенных, аналогичен
Фактура
Решение в лоб - представление в виде соответствующего (очень большого) количества
Фактура
Решение в лоб - представление в виде соответствующего (очень большого) количества
Трассировка лучей
Метод трассировки лучей используется не только для удаления невидимых частей,
Трассировка лучей
Метод трассировки лучей используется не только для удаления невидимых частей,
Тест
Что такое компьютерная графика?
Какие цветовые модели Вам известны?
Каково условие пересечения двух
Тест
Что такое компьютерная графика?
Какие цветовые модели Вам известны?
Каково условие пересечения двух
Вопросы?
Предложения?
Вопросы?
Предложения?
 Разработка клиентской части веб-приложения размещения товаров, резюме, недвижимости и услуг для рынка Аргентины
Разработка клиентской части веб-приложения размещения товаров, резюме, недвижимости и услуг для рынка Аргентины Інформаційно-комунікаційна система обробки результатів досліджень в спорті
Інформаційно-комунікаційна система обробки результатів досліджень в спорті Информация и её кодирование. Способы измерения информации
Информация и её кодирование. Способы измерения информации Inform Consulting. Более 12 лет на рынке Казахстана
Inform Consulting. Более 12 лет на рынке Казахстана AES стандарты. Rijndael алгоритмі. (Дәріс 6)
AES стандарты. Rijndael алгоритмі. (Дәріс 6)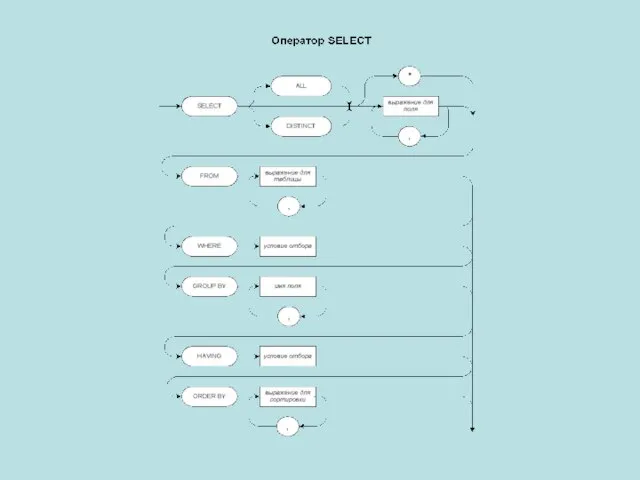 Схема построения запросов SQL
Схема построения запросов SQL Построение графиков функций в табличном редакторе MS EXCEL
Построение графиков функций в табличном редакторе MS EXCEL ОАиП текстовые файлы
ОАиП текстовые файлы Классификация
Классификация Способы записи алгоритмов
Способы записи алгоритмов Android Oreo 8.1
Android Oreo 8.1 Сценарии использования Системы
Сценарии использования Системы Delphi и базы данных
Delphi и базы данных Методы и средства проектирования информационных систем и технологий. Этапы проектирования ИС с использованием UML
Методы и средства проектирования информационных систем и технологий. Этапы проектирования ИС с использованием UML Проблемы информационной безопасности
Проблемы информационной безопасности Pilkington Spectrum Идеальный расчет
Pilkington Spectrum Идеальный расчет Основы программирования в Lazarus Гвасалия Д.А.
Основы программирования в Lazarus Гвасалия Д.А. Онлайн аптека. Мобильное приложение
Онлайн аптека. Мобильное приложение Алгоритмическая конструкция ветвление
Алгоритмическая конструкция ветвление practical_1658239220_aEhz
practical_1658239220_aEhz База даних
База даних Предмет методики обучения информатике
Предмет методики обучения информатике Форматирование текста
Форматирование текста Презентация на тему "История развития вычислительной техники"
Презентация на тему "История развития вычислительной техники" Библиографическое оформление научной работы
Библиографическое оформление научной работы Хранилища данных. Интеграция информационных ресурсов в хранилищах данных. (Лекция 6)
Хранилища данных. Интеграция информационных ресурсов в хранилищах данных. (Лекция 6) Электронные деньги (Цифровые деньги). Системы электронной наличности
Электронные деньги (Цифровые деньги). Системы электронной наличности Персональный компьютер: устройство и принцип работы
Персональный компьютер: устройство и принцип работы