- Уроки по Spike Prime. Датчик силы

Содержание
- 2. ЦЕЛЬ УРОКА Узнаем, как использовать датчик силы. Узнаем, как использовать функцию ожидания. Copyright © 2020 SPIKE
- 3. ЧТО ТАКОЕ ДАТЧИК СИЛЫ? Copyright © 2020 SPIKE Prime Lessons (primelessons.org) CC-BY-NC-SA. Датчик силы выполняет два
- 4. КАК МЫ ПРОГРАММИРУЕМ С ПОМОЩЬЮ ДАТЧИКА СИЛЫ Так же как и моторы, датчик силы должен быть
- 5. ЗАДАЧА 1: ДВИГАТЬСЯ ДО НАЖАТИЯ ДАТЧИКА СИЛЫ Запрограммируем робота, чтобы он двигался, пока вы не нажмете
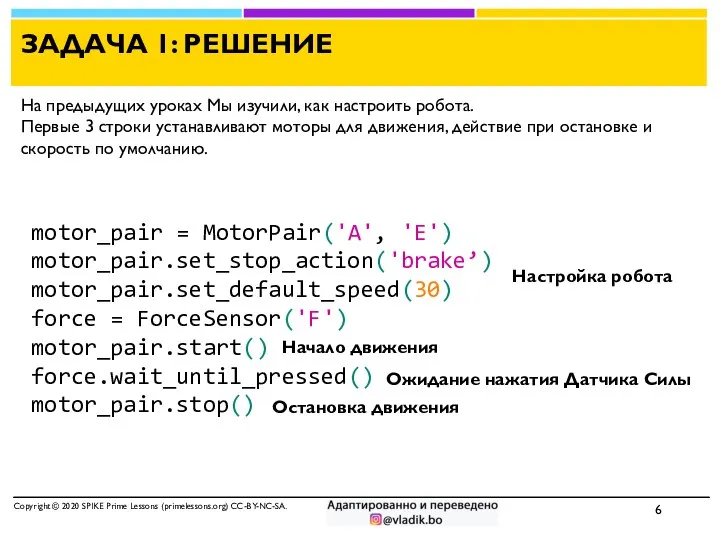
- 6. motor_pair = MotorPair('A', 'E') motor_pair.set_stop_action('brake’) motor_pair.set_default_speed(30) force = ForceSensor('F') motor_pair.start() force.wait_until_pressed() motor_pair.stop() ЗАДАЧА 1: РЕШЕНИЕ Copyright
- 8. Скачать презентацию

ЦЕЛЬ УРОКА
Узнаем, как использовать датчик силы.
Узнаем, как использовать функцию ожидания.
Copyright ©
ЦЕЛЬ УРОКА
Узнаем, как использовать датчик силы.
Узнаем, как использовать функцию ожидания.
Copyright ©
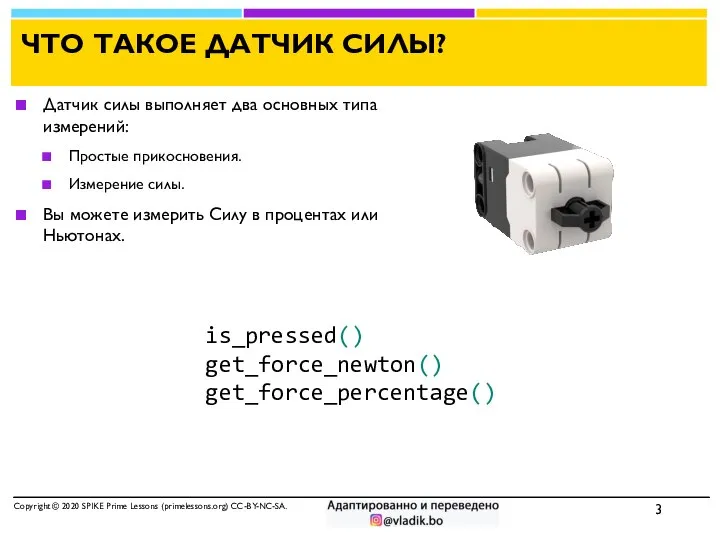
ЧТО ТАКОЕ ДАТЧИК СИЛЫ?
Copyright © 2020 SPIKE Prime Lessons (primelessons.org) CC-BY-NC-SA.
ЧТО ТАКОЕ ДАТЧИК СИЛЫ?
Copyright © 2020 SPIKE Prime Lessons (primelessons.org) CC-BY-NC-SA.
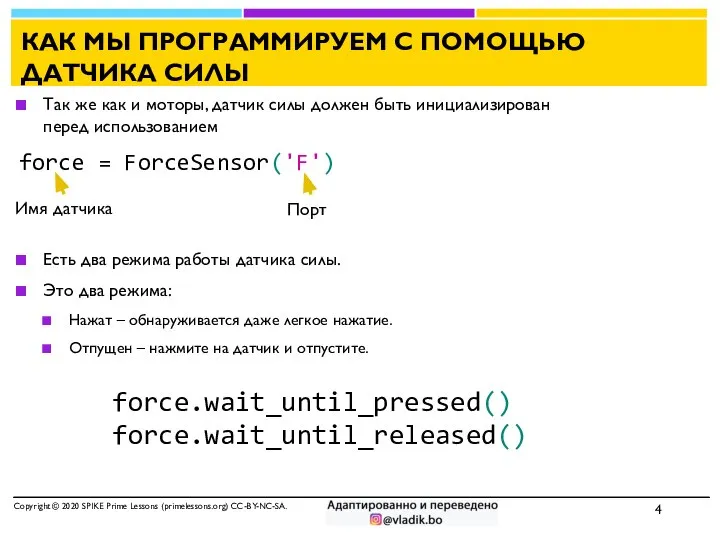
КАК МЫ ПРОГРАММИРУЕМ С ПОМОЩЬЮ ДАТЧИКА СИЛЫ
Так же как и моторы,
КАК МЫ ПРОГРАММИРУЕМ С ПОМОЩЬЮ ДАТЧИКА СИЛЫ
Так же как и моторы,
ЗАДАЧА 1: ДВИГАТЬСЯ ДО НАЖАТИЯ ДАТЧИКА СИЛЫ
Запрограммируем робота, чтобы он двигался,
ЗАДАЧА 1: ДВИГАТЬСЯ ДО НАЖАТИЯ ДАТЧИКА СИЛЫ
Запрограммируем робота, чтобы он двигался,
motor_pair = MotorPair('A', 'E')
motor_pair.set_stop_action('brake’)
motor_pair.set_default_speed(30)
force = ForceSensor('F')
motor_pair.start()
force.wait_until_pressed()
motor_pair.stop()
ЗАДАЧА 1: РЕШЕНИЕ
Copyright © 2020 SPIKE Prime Lessons (primelessons.org) CC-BY-NC-SA.
На
motor_pair = MotorPair('A', 'E')
motor_pair.set_stop_action('brake’)
motor_pair.set_default_speed(30)
force = ForceSensor('F')
motor_pair.start()
force.wait_until_pressed()
motor_pair.stop()
ЗАДАЧА 1: РЕШЕНИЕ
Copyright © 2020 SPIKE Prime Lessons (primelessons.org) CC-BY-NC-SA.
На
 БО
БО Технология создания мульмедийной презентации
Технология создания мульмедийной презентации Дополненная реальность в образовательных программах
Дополненная реальность в образовательных программах Почему виртуальная реальность не выстрелила?
Почему виртуальная реальность не выстрелила? Циклические алгоритмы
Циклические алгоритмы Ао Компания ТрансТелеКом. Коммутация
Ао Компания ТрансТелеКом. Коммутация Тема: «Современные средства телекоммуникации.» Подготовила студентка КОА 32 ПИ Скороходова Татьяна Алексеевна Преподават
Тема: «Современные средства телекоммуникации.» Подготовила студентка КОА 32 ПИ Скороходова Татьяна Алексеевна Преподават 3D-моделирование. Для чего нужно 3D-моделирование?
3D-моделирование. Для чего нужно 3D-моделирование? Администрирование БД. Управление разрешениями
Администрирование БД. Управление разрешениями Информационная безопасность. Общие принципы. (Лекция 1)
Информационная безопасность. Общие принципы. (Лекция 1) Workshop. Mattepainting. Фотоколажування
Workshop. Mattepainting. Фотоколажування Форматирование текста
Форматирование текста Вспоминалки. Доступ к свойствам и методам
Вспоминалки. Доступ к свойствам и методам Программная инженерия
Программная инженерия Организация, проведение и оценка эксперимента
Организация, проведение и оценка эксперимента Конструирование языка пиктограмм пользовательского интерфейса
Конструирование языка пиктограмм пользовательского интерфейса Cals - технологии
Cals - технологии Що таке Angular
Що таке Angular Развитие Алгоритмов шифрования
Развитие Алгоритмов шифрования Системы счисления
Системы счисления Методы научных исследований
Методы научных исследований Классификация компьютерных сетей
Классификация компьютерных сетей Принципы построения распределенных баз данных
Принципы построения распределенных баз данных Как подготовить презентацию проекта. Пособие для учащихся
Как подготовить презентацию проекта. Пособие для учащихся Файловые системы. Работа с файлами в Windows API. Совместная работа с файлами
Файловые системы. Работа с файлами в Windows API. Совместная работа с файлами Вставка формулы в текстовый документ
Вставка формулы в текстовый документ История развития вычислительной техники
История развития вычислительной техники Internet communication
Internet communication