Автоматическое планирование траектории. Программа для оптимального поиска пути от одной точки до другой в двумерном пространстве
- Автоматическое планирование траектории. Программа для оптимального поиска пути от одной точки до другой в двумерном пространстве

Содержание
- 2. Высшая школа экономики, Москва, 2019 КРАТКОЕ ОПИСАНИЕ ПРОЕКТА фото фото фото Программа предназначена для оптимального поиска
- 3. Высшая школа экономики, Москва, 2019 ОСНОВНЫЕ ПОНЯТИЯ, ОПРЕДЕЛЕНИЯ, ТЕРМИНЫ фото фото фото Open-вершины – вершины, минимальное
- 4. Высшая школа экономики, Москва, 2019 АКТУАЛЬНОСТЬ РАБОТЫ фото фото фото Программа может быть предназначена для пользователей,
- 5. Высшая школа экономики, Москва, 2019 ЦЕЛЬ И ЗАДАЧИ РАБОТЫ фото фото фото Цель работы Программа находит
- 6. Высшая школа экономики, Москва, 2019 ВЫБОР АЛГОРИТМОВ ДЛЯ РЕАЛИЗАЦИИ фото фото фото Для реализации поиска пути
- 7. Высшая школа экономики, Москва, 2019 ОПИСАНИЕ A* фото фото Алгоритм работает следующим образом. Для начала достаётся
- 8. Высшая школа экономики, Москва, 2019 ДЕМОНСТРАЦИЯ РАБОТЫ A* фото фото
- 9. Высшая школа экономики, Москва, 2019 ОПИСАНИЕ ТИПОВ ДВИЖЕНИЯ фото фото фото Allowdiagonal – разрешено перемещение в
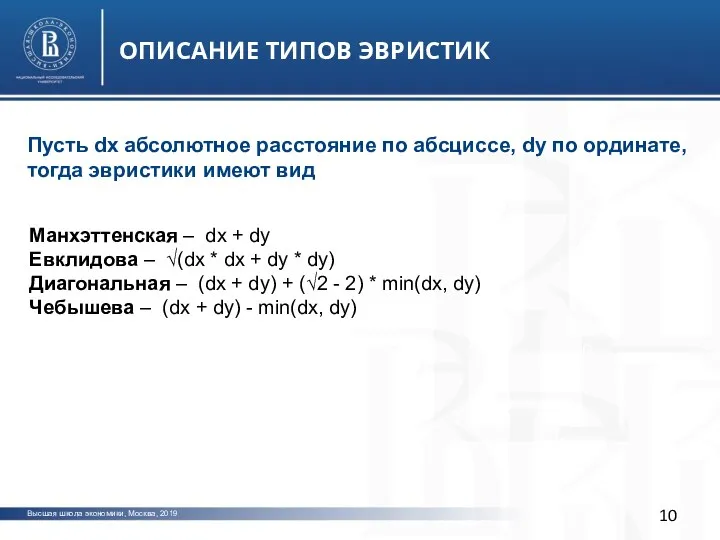
- 10. Высшая школа экономики, Москва, 2019 ОПИСАНИЕ ТИПОВ ЭВРИСТИК фото фото фото Манхэттенская – dx + dy
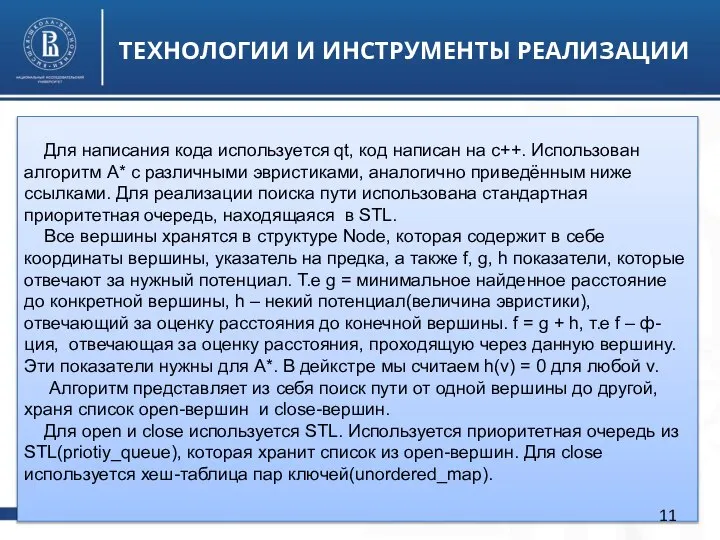
- 11. Высшая школа экономики, Москва, 2019 ТЕХНОЛОГИИ И ИНСТРУМЕНТЫ РЕАЛИЗАЦИИ фото фото фото Для написания кода используется
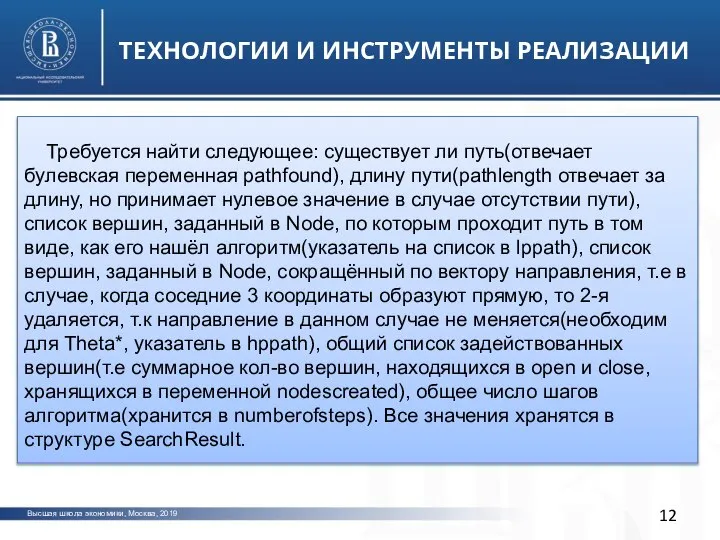
- 12. Высшая школа экономики, Москва, 2019 ТЕХНОЛОГИИ И ИНСТРУМЕНТЫ РЕАЛИЗАЦИИ фото фото фото Требуется найти следующее: существует
- 13. Высшая школа экономики, Москва, 2019 ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ фото фото фото Программа определяет наличие пути между
- 14. Высшая школа экономики, Москва, 2019 СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ фото фото https://www.cs.helsinki.fi/u/bmmalone/heuristic-search-fall-2013/Korf1996.pdf http://www.cs.cmu.edu/~maxim/files/ad_aij08_preprint.pdf https://www.cs.cmu.edu/~maxim/files/tutorials/robschooltutorial_oct10.pdf http://theory.stanford.edu/~amitp/GameProgramming/ https://ru.wikipedia.org/wiki/A* http://neerc.ifmo.ru/wiki/index.php?title=%D0%90%D0%BB%D0%B3%D0%BE%D1%80%D0%B8%D1%82%D0%BC_A*
- 16. Скачать презентацию
Высшая школа экономики, Москва, 2019
КРАТКОЕ ОПИСАНИЕ ПРОЕКТА
фото
фото
фото
Программа предназначена для оптимального поиска
Высшая школа экономики, Москва, 2019
КРАТКОЕ ОПИСАНИЕ ПРОЕКТА
фото
фото
фото
Программа предназначена для оптимального поиска
Высшая школа экономики, Москва, 2019
ОСНОВНЫЕ ПОНЯТИЯ, ОПРЕДЕЛЕНИЯ, ТЕРМИНЫ
фото
фото
фото
Open-вершины – вершины, минимальное
Высшая школа экономики, Москва, 2019
ОСНОВНЫЕ ПОНЯТИЯ, ОПРЕДЕЛЕНИЯ, ТЕРМИНЫ
фото
фото
фото
Open-вершины – вершины, минимальное
Высшая школа экономики, Москва, 2019
АКТУАЛЬНОСТЬ РАБОТЫ
фото
фото
фото
Программа может быть предназначена для пользователей,
Высшая школа экономики, Москва, 2019
АКТУАЛЬНОСТЬ РАБОТЫ
фото
фото
фото
Программа может быть предназначена для пользователей,
Высшая школа экономики, Москва, 2019
ЦЕЛЬ И ЗАДАЧИ РАБОТЫ
фото
фото
фото
Цель работы
Программа находит оптимальное
Высшая школа экономики, Москва, 2019
ЦЕЛЬ И ЗАДАЧИ РАБОТЫ
фото
фото
фото
Цель работы Программа находит оптимальное
Высшая школа экономики, Москва, 2019
ВЫБОР АЛГОРИТМОВ ДЛЯ РЕАЛИЗАЦИИ
фото
фото
фото
Для реализации поиска
Высшая школа экономики, Москва, 2019
ВЫБОР АЛГОРИТМОВ ДЛЯ РЕАЛИЗАЦИИ
фото
фото
фото
Для реализации поиска
Высшая школа экономики, Москва, 2019
ОПИСАНИЕ A*
фото
фото
Алгоритм работает следующим образом. Для
Высшая школа экономики, Москва, 2019
ОПИСАНИЕ A*
фото
фото
Алгоритм работает следующим образом. Для
Высшая школа экономики, Москва, 2019
ДЕМОНСТРАЦИЯ РАБОТЫ A*
фото
фото
Высшая школа экономики, Москва, 2019
ДЕМОНСТРАЦИЯ РАБОТЫ A*
фото
фото
Высшая школа экономики, Москва, 2019
ОПИСАНИЕ ТИПОВ ДВИЖЕНИЯ
фото
фото
фото
Allowdiagonal – разрешено перемещение в
Высшая школа экономики, Москва, 2019
ОПИСАНИЕ ТИПОВ ДВИЖЕНИЯ
фото
фото
фото
Allowdiagonal – разрешено перемещение в
Высшая школа экономики, Москва, 2019
ОПИСАНИЕ ТИПОВ ЭВРИСТИК
фото
фото
фото
Манхэттенская – dx + dy
Евклидова
Высшая школа экономики, Москва, 2019
ОПИСАНИЕ ТИПОВ ЭВРИСТИК
фото
фото
фото
Манхэттенская – dx + dy
Евклидова
Высшая школа экономики, Москва, 2019
ТЕХНОЛОГИИ И ИНСТРУМЕНТЫ РЕАЛИЗАЦИИ
фото
фото
фото
Для написания кода
Высшая школа экономики, Москва, 2019
ТЕХНОЛОГИИ И ИНСТРУМЕНТЫ РЕАЛИЗАЦИИ
фото
фото
фото
Для написания кода
Высшая школа экономики, Москва, 2019
ТЕХНОЛОГИИ И ИНСТРУМЕНТЫ РЕАЛИЗАЦИИ
фото
фото
фото
Требуется найти следующее:
Высшая школа экономики, Москва, 2019
ТЕХНОЛОГИИ И ИНСТРУМЕНТЫ РЕАЛИЗАЦИИ
фото
фото
фото
Требуется найти следующее:
Высшая школа экономики, Москва, 2019
ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
фото
фото
фото
Программа определяет наличие пути между
Высшая школа экономики, Москва, 2019
ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
фото
фото
фото
Программа определяет наличие пути между
Высшая школа экономики, Москва, 2019
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
фото
фото
https://www.cs.helsinki.fi/u/bmmalone/heuristic-search-fall-2013/Korf1996.pdf
http://www.cs.cmu.edu/~maxim/files/ad_aij08_preprint.pdf
https://www.cs.cmu.edu/~maxim/files/tutorials/robschooltutorial_oct10.pdf
http://theory.stanford.edu/~amitp/GameProgramming/
https://ru.wikipedia.org/wiki/A*
http://neerc.ifmo.ru/wiki/index.php?title=%D0%90%D0%BB%D0%B3%D0%BE%D1%80%D0%B8%D1%82%D0%BC_A*
Высшая школа экономики, Москва, 2019
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
фото
фото
https://www.cs.helsinki.fi/u/bmmalone/heuristic-search-fall-2013/Korf1996.pdf
http://www.cs.cmu.edu/~maxim/files/ad_aij08_preprint.pdf
https://www.cs.cmu.edu/~maxim/files/tutorials/robschooltutorial_oct10.pdf
http://theory.stanford.edu/~amitp/GameProgramming/
https://ru.wikipedia.org/wiki/A*
http://neerc.ifmo.ru/wiki/index.php?title=%D0%90%D0%BB%D0%B3%D0%BE%D1%80%D0%B8%D1%82%D0%BC_A*
 Последовательности. Арифметическая и геометрическая прогрессии
Последовательности. Арифметическая и геометрическая прогрессии Теорема Менелая
Теорема Менелая Соотношение между сторонами и углами треугольника. Скалярное произведение векторов. (Вариант 2)
Соотношение между сторонами и углами треугольника. Скалярное произведение векторов. (Вариант 2) Плоские фигуры - многоугольники. Объемные фигуры
Плоские фигуры - многоугольники. Объемные фигуры «Таблица умножения и деления». 2 класс
«Таблица умножения и деления». 2 класс Математический КВН Для учеников 3 класса (мероприятия проводят ученики 5 класса)
Математический КВН Для учеников 3 класса (мероприятия проводят ученики 5 класса)  Диаграммы в Excel
Диаграммы в Excel Презентация Оценка эффективности финансовых операций
Презентация Оценка эффективности финансовых операций Касательная к окружности. 7 класс
Касательная к окружности. 7 класс Презентация по математике "Соотношение углов и сторон прямоугольного треугольника" - скачать
Презентация по математике "Соотношение углов и сторон прямоугольного треугольника" - скачать  Функції. Властивості функцій. Перетворення графіків функцій
Функції. Властивості функцій. Перетворення графіків функцій Основные свойства степеней
Основные свойства степеней Теорема о площади треугольника
Теорема о площади треугольника Масштаб. Урок математики в 6 классе
Масштаб. Урок математики в 6 классе Деление с остатком
Деление с остатком Комбинаторика. Решение комбинаторных задач
Комбинаторика. Решение комбинаторных задач Презентация Знаки «+», «–»,«=»
Презентация Знаки «+», «–»,«=»  Тригонометрия в жизни
Тригонометрия в жизни Урок – закрепление по теме «Угол между прямой и плоскостью». Решение задач
Урок – закрепление по теме «Угол между прямой и плоскостью». Решение задач Презентация по математике "Теория бесконечных множеств. Часть 2" - скачать бесплатно
Презентация по математике "Теория бесконечных множеств. Часть 2" - скачать бесплатно Сечения параллелепипеда. Геометрия. 10 класс. г. Екатеринбург. МАОУ-гимназия №13. Учитель математики Анкина Тамара Степановна.
Сечения параллелепипеда. Геометрия. 10 класс. г. Екатеринбург. МАОУ-гимназия №13. Учитель математики Анкина Тамара Степановна.  Правила нахождения производных
Правила нахождения производных Арифметическая и геометрическая прогрессии
Арифметическая и геометрическая прогрессии Признаки делимости на 3 и 9
Признаки делимости на 3 и 9 Проверка деления с остатком
Проверка деления с остатком Объем цилиндра
Объем цилиндра Перпендикулярность прямой и плоскости
Перпендикулярность прямой и плоскости Математика. Примеры
Математика. Примеры