- Динамические системы и их математические модели

Содержание
- 2. План лекции №3 1. Статические и динамические системы. 2. Линейные и нелинейные системы. 3. Дифференциальные уравнения
- 3. Статические и динамические системы Динамическая система – система, в широком смысле находящаяся в постоянном движении, параметры
- 4. Принцип наложения (суперпозиции) Отклик (реакция) системы на сумму воздействий равен взвешенной сумме откликов (реакций) системы на
- 5. Дифференциальные уравнения динамических систем Составим дифференциальное уравнение для объекта с сосредоточенными ёмкостями. Уравнения энергетического и материального
- 6. Дифференциальные уравнения линейных систем Дифференциальные уравнения линейных систем имеют вид: После всех необходимых преобразований дифференциальное уравнение
- 7. Типовые воздействия Динамическая характеристика – это характеристика, определяющая реакцию системы на некоторые типовые входные воздействия (их
- 8. Функция Хевисайда Переходная характеристика – это реакция объекта/системы на функцию Хевисайда. Переходная характеристика обозначается h(t). 10/10/2017
- 9. Кривая разгона Кривая разгона – это реакция динамической системы на ступенчатое воздействие произвольной величины. Кривая разгона
- 10. Функция Дирака Импульсная переходная характеристика – это реакция объекта/системы на функцию Дирака. Импульсная переходная характеристика представляет
- 11. Гармоническое воздействие Гармоническая характеристика – это реакция объекта на гармоническое воздействие. 10/10/2017 АСУТП В ТТТ. ЛЕКЦИЯ
- 12. Интеграл свертки 10/10/2017 АСУТП В ТТТ. ЛЕКЦИЯ 3
- 13. Переходная характеристика Если входное воздействие представляет собой единичную ступеньку или функцию Хевисайда (то есть, на выходе
- 14. Статическая и динамическая системы Из интеграла свертки следует, что выходная величина динамической системы в некоторый момент
- 15. Преобразование Лапласа С помощью преобразования Лапласа каждой функции в пространстве оригиналов ставится в соответствие некая функция
- 16. Преобразование Лапласа. Пример. Таблица преобразования Лапласа приведена в учебнике В.Я. Ротача в параграфе 2.2. 10/10/2017 АСУТП
- 17. Преобразование Лапласа. Пример. Таблица преобразования Лапласа приведена в учебнике В.Я. Ротача в параграфе 2.2. 10/10/2017 АСУТП
- 18. Свойства преобразования Лапласа 1. Линейность: 2. Изображение производной оригинала: 3. Начальное значение оригинала: 4. Конечное значение
- 19. Передаточная функция Пусть имеется дифференциальное уравнение динамической системы, выведенное на предыдущей лекции: Входное воздействие: Рассматриваемая система
- 20. Передаточная функция Тогда получим выражение: Передаточная функция системы - отношение преобразованной по Лапласу выходной величины системы
- 21. Решение дифференциальных уравнений с помощью преобразования Лапласа 1. Преобразовать по Лапласу входное воздействие: 2. По дифференциальному
- 22. Обратное преобразование Лапласа Обратное преобразование Лапласа выполняется по формуле: где: σ – действительное число. 10/10/2017 АСУТП
- 23. Алгоритмические структуры систем управления и их элементарные звенья. Виды схем. Понятие элементарного звена Структурные схемы Функциональные
- 24. Звенья на структурных схемах При разделении схемы на звенья (части) необходимо соблюдать принципы (правила) автономности и
- 25. Элементарные звенья статическое (безинерционное, пропорциональное, П); - интегрирующее (И); - дифференцирующее (идеальное дифференцирующее, Д); - реальное
- 26. Статическое звено Также называется безинерционным, пропорциональным или П-звеном. Примером физической реализации П-звена является рычаг, клапаны с
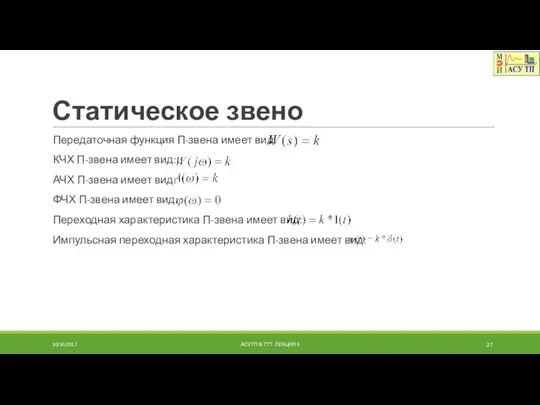
- 27. Статическое звено Передаточная функция П-звена имеет вид: КЧХ П-звена имеет вид: АЧХ П-звена имеет вид: ФЧХ
- 28. Интегрирующее звено Также называется И-звеном. Примером физической реализации И-звена является гидравлический исполнительный двигатель или гидравлическая система
- 29. Интегрирующее звено Передаточная функция И-звена имеет вид: КЧХ И-звена имеет вид: АЧХ И-звена имеет вид: ФЧХ
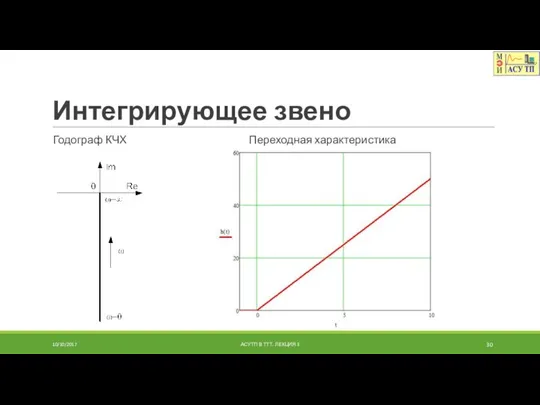
- 30. Интегрирующее звено Годограф КЧХ Переходная характеристика 10/10/2017 АСУТП В ТТТ. ЛЕКЦИЯ 3
- 31. Апериодическое звено Также называется А-звеном или инерционным звеном первого порядка. Примером физической реализации А-звена является RC-цепочка,
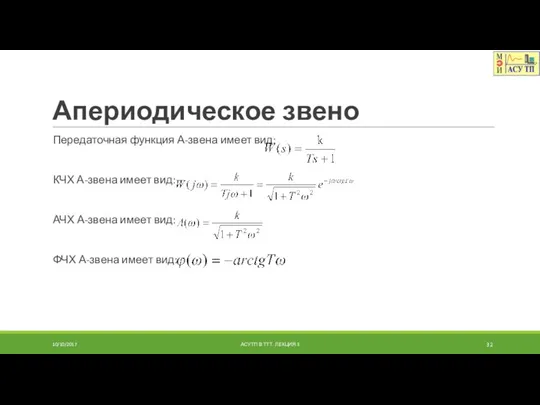
- 32. Апериодическое звено Передаточная функция А-звена имеет вид: КЧХ А-звена имеет вид: АЧХ А-звена имеет вид: ФЧХ
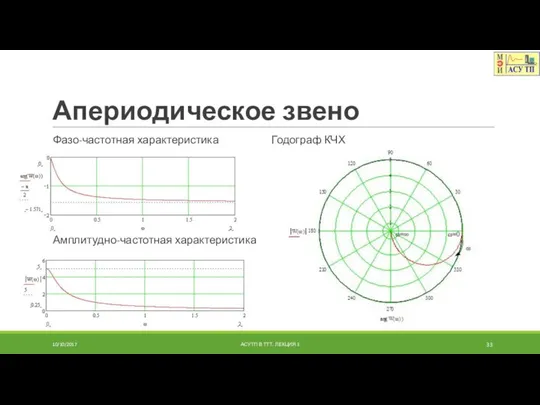
- 33. Апериодическое звено Фазо-частотная характеристика Годограф КЧХ Амплитудно-частотная характеристика 10/10/2017 АСУТП В ТТТ. ЛЕКЦИЯ 3
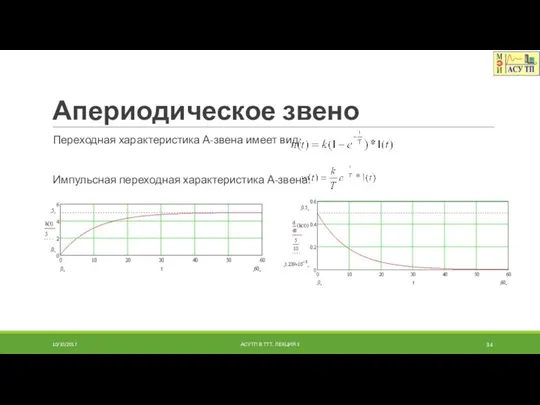
- 34. Апериодическое звено Переходная характеристика А-звена имеет вид: Импульсная переходная характеристика А-звена: 10/10/2017 АСУТП В ТТТ. ЛЕКЦИЯ
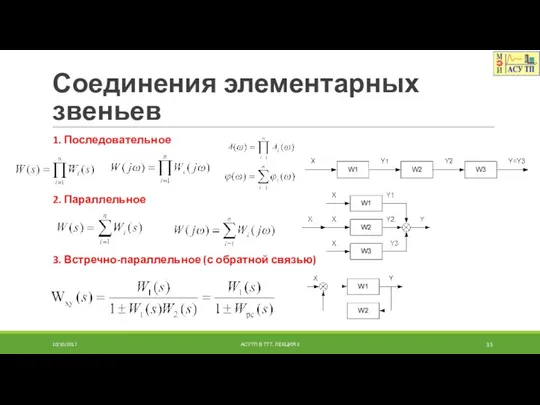
- 35. Соединения элементарных звеньев 1. Последовательное 2. Параллельное 3. Встречно-параллельное (с обратной связью) 10/10/2017 АСУТП В ТТТ.
- 36. Математические модели объектов управления Объекты С самовыравниванием Без самовыравнивания 10/10/2017 АСУТП В ТТТ. ЛЕКЦИЯ 3
- 38. Скачать презентацию
План лекции №3
1. Статические и динамические системы.
2. Линейные и нелинейные системы.
3.
План лекции №3
1. Статические и динамические системы.
2. Линейные и нелинейные системы.
3.
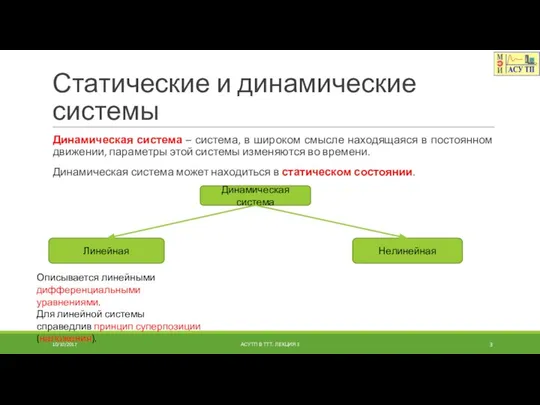
Статические и динамические системы
Динамическая система – система, в широком смысле находящаяся
Статические и динамические системы
Динамическая система – система, в широком смысле находящаяся
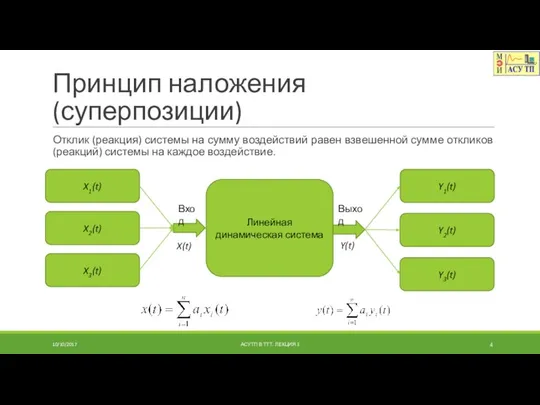
Принцип наложения (суперпозиции)
Отклик (реакция) системы на сумму воздействий равен взвешенной сумме
Принцип наложения (суперпозиции)
Отклик (реакция) системы на сумму воздействий равен взвешенной сумме

Дифференциальные уравнения динамических систем
Составим дифференциальное уравнение для объекта с сосредоточенными ёмкостями.
Дифференциальные уравнения динамических систем
Составим дифференциальное уравнение для объекта с сосредоточенными ёмкостями.

Дифференциальные уравнения линейных систем
Дифференциальные уравнения линейных систем имеют вид:
После всех необходимых
Дифференциальные уравнения линейных систем
Дифференциальные уравнения линейных систем имеют вид:
После всех необходимых

Типовые воздействия
Динамическая характеристика – это характеристика, определяющая реакцию системы на некоторые
Типовые воздействия
Динамическая характеристика – это характеристика, определяющая реакцию системы на некоторые

Функция Хевисайда
Переходная характеристика – это реакция объекта/системы на функцию Хевисайда. Переходная
Функция Хевисайда
Переходная характеристика – это реакция объекта/системы на функцию Хевисайда. Переходная
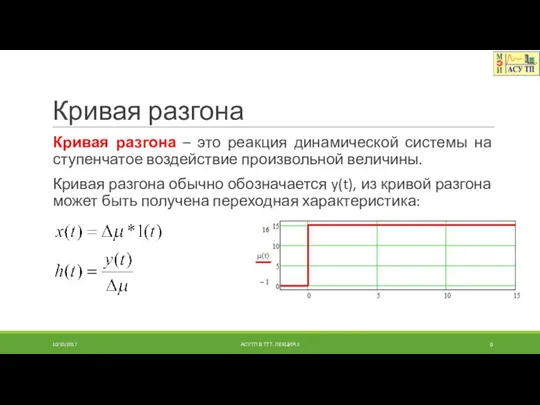
Кривая разгона
Кривая разгона – это реакция динамической системы на ступенчатое воздействие
Кривая разгона
Кривая разгона – это реакция динамической системы на ступенчатое воздействие
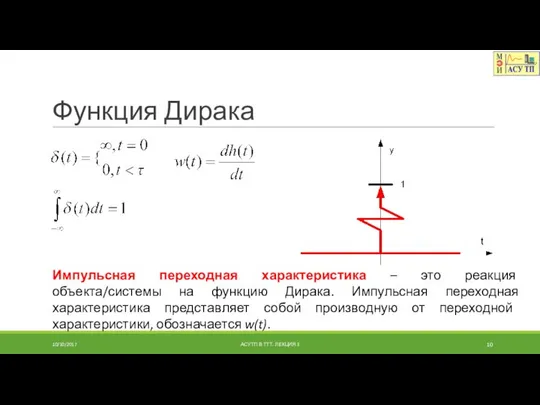
Функция Дирака
Импульсная переходная характеристика – это реакция объекта/системы на функцию Дирака.
Функция Дирака
Импульсная переходная характеристика – это реакция объекта/системы на функцию Дирака.

Гармоническое воздействие
Гармоническая характеристика – это реакция объекта на гармоническое воздействие.
10/10/2017
АСУТП В
Гармоническое воздействие
Гармоническая характеристика – это реакция объекта на гармоническое воздействие.
10/10/2017
АСУТП В
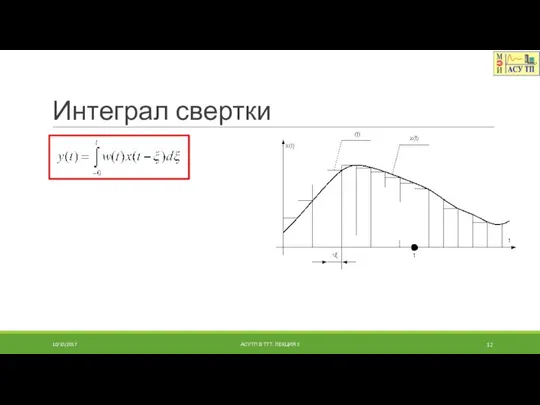
Интеграл свертки
10/10/2017
АСУТП В ТТТ. ЛЕКЦИЯ 3
Интеграл свертки
10/10/2017
АСУТП В ТТТ. ЛЕКЦИЯ 3

Переходная характеристика
Если входное воздействие представляет собой единичную ступеньку или функцию Хевисайда
Переходная характеристика
Если входное воздействие представляет собой единичную ступеньку или функцию Хевисайда
Статическая и динамическая системы
Из интеграла свертки следует, что выходная величина динамической
Статическая и динамическая системы
Из интеграла свертки следует, что выходная величина динамической
Преобразование Лапласа
С помощью преобразования Лапласа каждой функции в пространстве оригиналов ставится
Преобразование Лапласа
С помощью преобразования Лапласа каждой функции в пространстве оригиналов ставится

Преобразование Лапласа. Пример.
Таблица преобразования Лапласа приведена в учебнике В.Я. Ротача в
Преобразование Лапласа. Пример.
Таблица преобразования Лапласа приведена в учебнике В.Я. Ротача в
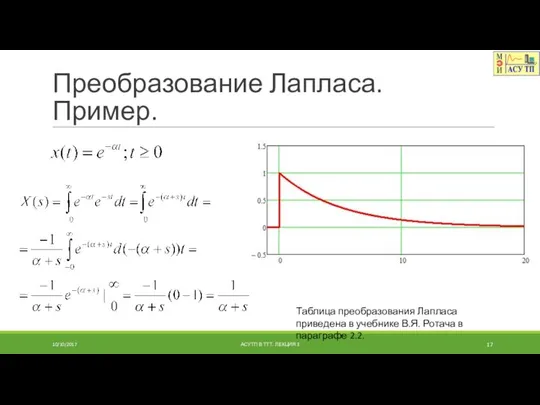
Преобразование Лапласа. Пример.
Таблица преобразования Лапласа приведена в учебнике В.Я. Ротача в
Преобразование Лапласа. Пример.
Таблица преобразования Лапласа приведена в учебнике В.Я. Ротача в

Свойства преобразования Лапласа
1. Линейность:
2. Изображение производной оригинала:
3. Начальное значение оригинала:
4.
Свойства преобразования Лапласа
1. Линейность:
2. Изображение производной оригинала:
3. Начальное значение оригинала:
4.

Передаточная функция
Пусть имеется дифференциальное уравнение динамической системы, выведенное на предыдущей лекции:
Входное
Передаточная функция
Пусть имеется дифференциальное уравнение динамической системы, выведенное на предыдущей лекции:
Входное
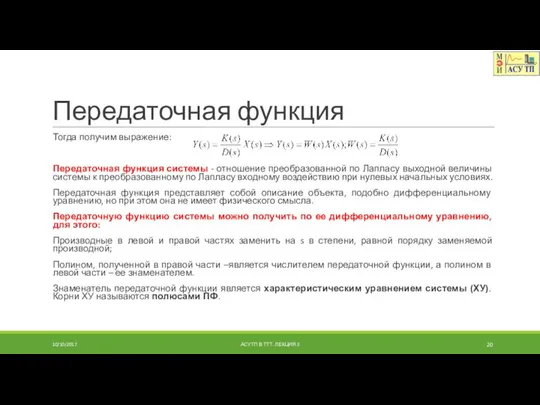
Передаточная функция
Тогда получим выражение:
Передаточная функция системы - отношение преобразованной по Лапласу
Передаточная функция
Тогда получим выражение:
Передаточная функция системы - отношение преобразованной по Лапласу

Решение дифференциальных уравнений с помощью преобразования Лапласа
1. Преобразовать по Лапласу входное
Решение дифференциальных уравнений с помощью преобразования Лапласа
1. Преобразовать по Лапласу входное
Обратное преобразование Лапласа
Обратное преобразование Лапласа выполняется по формуле:
где: σ – действительное
Обратное преобразование Лапласа
Обратное преобразование Лапласа выполняется по формуле:
где: σ – действительное
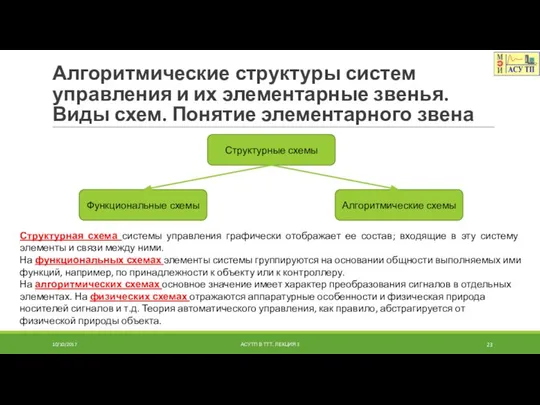
Алгоритмические структуры систем управления и их элементарные звенья. Виды схем. Понятие
Алгоритмические структуры систем управления и их элементарные звенья. Виды схем. Понятие
Звенья на структурных схемах
При разделении схемы на звенья (части) необходимо соблюдать
Звенья на структурных схемах
При разделении схемы на звенья (части) необходимо соблюдать
Элементарные звенья
статическое (безинерционное, пропорциональное, П);
- интегрирующее (И);
- дифференцирующее (идеальное дифференцирующее, Д);
-
Элементарные звенья
статическое (безинерционное, пропорциональное, П);
- интегрирующее (И);
- дифференцирующее (идеальное дифференцирующее, Д);
-
Статическое звено
Также называется безинерционным, пропорциональным или П-звеном. Примером физической реализации П-звена
Статическое звено
Также называется безинерционным, пропорциональным или П-звеном. Примером физической реализации П-звена
Статическое звено
Передаточная функция П-звена имеет вид:
КЧХ П-звена имеет вид:
АЧХ
Статическое звено
Передаточная функция П-звена имеет вид:
КЧХ П-звена имеет вид:
АЧХ
Интегрирующее звено
Также называется И-звеном. Примером физической реализации И-звена является гидравлический исполнительный
Интегрирующее звено
Также называется И-звеном. Примером физической реализации И-звена является гидравлический исполнительный
Интегрирующее звено
Передаточная функция И-звена имеет вид:
КЧХ И-звена имеет вид:
АЧХ
Интегрирующее звено
Передаточная функция И-звена имеет вид:
КЧХ И-звена имеет вид:
АЧХ
Интегрирующее звено
Годограф КЧХ Переходная характеристика
10/10/2017
АСУТП В ТТТ. ЛЕКЦИЯ 3
Интегрирующее звено
Годограф КЧХ Переходная характеристика
10/10/2017
АСУТП В ТТТ. ЛЕКЦИЯ 3
Апериодическое звено
Также называется А-звеном или инерционным звеном первого порядка.
Примером физической реализации
Апериодическое звено
Также называется А-звеном или инерционным звеном первого порядка.
Примером физической реализации
Апериодическое звено
Передаточная функция А-звена имеет вид:
КЧХ А-звена имеет вид:
АЧХ А-звена
Апериодическое звено
Передаточная функция А-звена имеет вид:
КЧХ А-звена имеет вид:
АЧХ А-звена
Апериодическое звено
Фазо-частотная характеристика Годограф КЧХ
Амплитудно-частотная характеристика
10/10/2017
АСУТП В ТТТ. ЛЕКЦИЯ 3
Апериодическое звено
Фазо-частотная характеристика Годограф КЧХ
Амплитудно-частотная характеристика
10/10/2017
АСУТП В ТТТ. ЛЕКЦИЯ 3
Апериодическое звено
Переходная характеристика А-звена имеет вид:
Импульсная переходная характеристика А-звена:
10/10/2017
АСУТП
Апериодическое звено
Переходная характеристика А-звена имеет вид:
Импульсная переходная характеристика А-звена:
10/10/2017
АСУТП
Соединения элементарных звеньев
1. Последовательное
2. Параллельное
3. Встречно-параллельное (с обратной связью)
10/10/2017
АСУТП В
Соединения элементарных звеньев
1. Последовательное
2. Параллельное
3. Встречно-параллельное (с обратной связью)
10/10/2017
АСУТП В
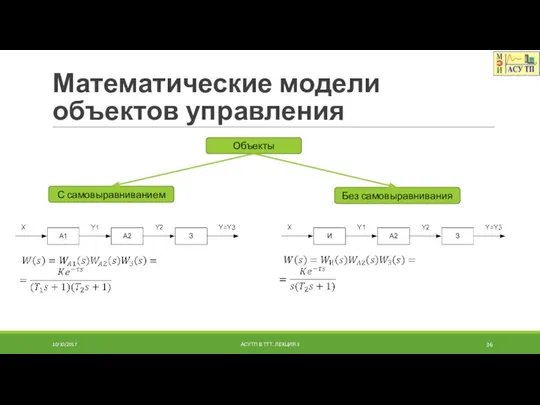
Математические модели объектов управления
Объекты
С самовыравниванием
Без самовыравнивания
10/10/2017
АСУТП В ТТТ. ЛЕКЦИЯ 3
Математические модели объектов управления
Объекты
С самовыравниванием
Без самовыравнивания
10/10/2017
АСУТП В ТТТ. ЛЕКЦИЯ 3
 Матрицы и действия над ними
Матрицы и действия над ними Статистические методы обработки медико-биологических данных. Нормальный закон распределения
Статистические методы обработки медико-биологических данных. Нормальный закон распределения Упрощение выражений
Упрощение выражений Цилиндр. Цилиндрическая поверхность. Площадь полной поверхности и объем цилиндра
Цилиндр. Цилиндрическая поверхность. Площадь полной поверхности и объем цилиндра Кривые второго порядка на плоскости
Кривые второго порядка на плоскости Архитектура и геометрия
Архитектура и геометрия Развитие творческой деятельности учащихся в процессе составления задач по историческим данным краеведческого характера
Развитие творческой деятельности учащихся в процессе составления задач по историческим данным краеведческого характера Площадь параллелограмма, треугольника и трапеции. Урок 18
Площадь параллелограмма, треугольника и трапеции. Урок 18 Параллелограмм. Свойства. Признаки
Параллелограмм. Свойства. Признаки Осевая и центральная симметрия
Осевая и центральная симметрия Математика в реальной жизни
Математика в реальной жизни Цилиндр. Правильный круглый цилиндр. Эллиптический цилиндр
Цилиндр. Правильный круглый цилиндр. Эллиптический цилиндр Площадь треугольника
Площадь треугольника Симметрия. Виды симметрии
Симметрия. Виды симметрии Перпендикулярность прямой и плоскости
Перпендикулярность прямой и плоскости Счёт предметов. Цифра 5
Счёт предметов. Цифра 5 Методы численного дифференцирования. Алгоритмы методов Эйлера
Методы численного дифференцирования. Алгоритмы методов Эйлера Презентация на тему Немного о дробях
Презентация на тему Немного о дробях  Метапредметные результаты. Компетентностноориентированные задания. 9 класс
Метапредметные результаты. Компетентностноориентированные задания. 9 класс Одночлен и его стандартный вид. 7 класс
Одночлен и его стандартный вид. 7 класс Статистические исследования
Статистические исследования Выделение целой части из неправильной дроби
Выделение целой части из неправильной дроби Деление рациональных дробей (Урок алгебры 8 класс)
Деление рациональных дробей (Урок алгебры 8 класс) Functions of Random Variables 2. Method of Distribution Functions
Functions of Random Variables 2. Method of Distribution Functions Презентация "Математики"
Презентация "Математики" Учитель: Зимина Марина Евгеньевна МОУ СОШ№8 г. Саранск Урок-путешествие к острову Натуральных чисел
Учитель: Зимина Марина Евгеньевна МОУ СОШ№8 г. Саранск Урок-путешествие к острову Натуральных чисел Подобие треугольников. Задачи
Подобие треугольников. Задачи Оформлення геометричних задач
Оформлення геометричних задач