- Динамическое описание систем. Фильтрация Калмана

Содержание
- 2. 1. Фильтрация Калмана. Введение 3 2. Анализ свойств Фильтра Калмана 9 2.1 Фильтрация медленных процессов 3.
- 4. Схема обработки фильтром ИСХ. ДАННЫЕ: 2 исходные оценки (зеленые точечки) модель движения – вектор скорости позволяет
- 5. Содержание Начальная оценка Подвижка: “экстра- поляция” Обработка вектора невязки Модель экстраполяции по опорным точкам оценок ИЗМЕРЕНИЕ
- 6. Динамика обработки информации x(k-2) y(k-2) x(k-1/k-2) Экстраполяция y(k-1) x(k/k-1) x(k/k-2)-пропуск ИЗМЕРЕНИЙ x(k) K(k)z(k/k-1) y(k) x(k+1) Z(k/k-1)
- 7. Размеры СТРОБА при пропуске измерений
- 8. Исходное описание движения в пространстве состояний в форме От него легко перейти к передаточной функции W(p)
- 16. Фильтрация Калмана Возможны два варианта описания динамических систем – с помощью дифференциальных или разностных уравнений. Наш
- 17. Задача фильтрации требует уменьшить влияние. Задачу фильтрации будем решать методом наименьших квадратов. Вводится эмпирический риск :
- 18. Принятая модель уравнения (1) дает возможность записать риск. Необходимо так выбрать xi, чтобы получить минимум по
- 19. – фильтр Калмана сглаживает шумы и, если шумы гауссовские, то этот фильтр является оптимальным. Формула (4)
- 20. Фильтр Калмана дает оценку процесса истинного процесса для гауссовских шумов, оптимальную по критерию (4) – по
- 21. Анализ свойств Фильтра Калмана При а=0.999 и , х(t) есть медленный процесс, тогда что следует из
- 22. .⊗.. недостатки В таком фильтре Калмана почти полностью игнорируются наблюдения. При оценке ситуации фильтр Калмана не
- 23. Тогда , в этом случае (оценка) равна самим наблюдениям. Это значит, что фильтр Калмана не доверяет
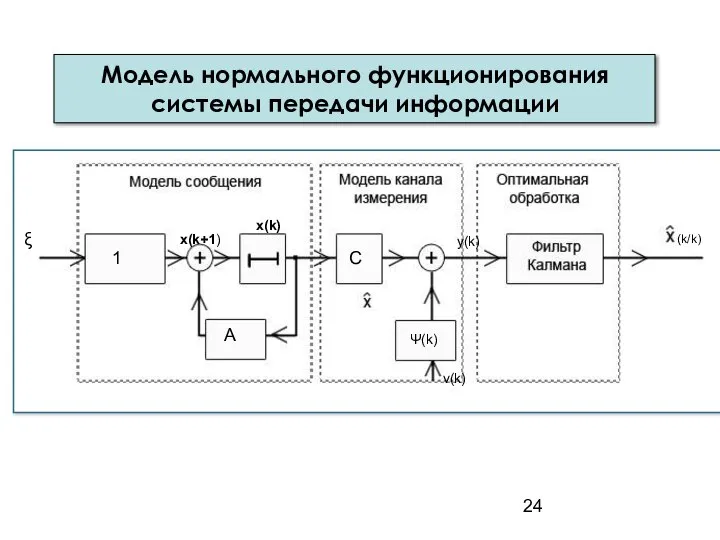
- 24. Модель нормального функционирования системы передачи информации 1 С x(k+1) x(k) y(k) A Ψ(k) v(k) ξ (k/k)
- 25. В первом случае вектор состояния системы x(fe) содержит в качестве своей компоненты передаваемое сообщение. Это сообщение
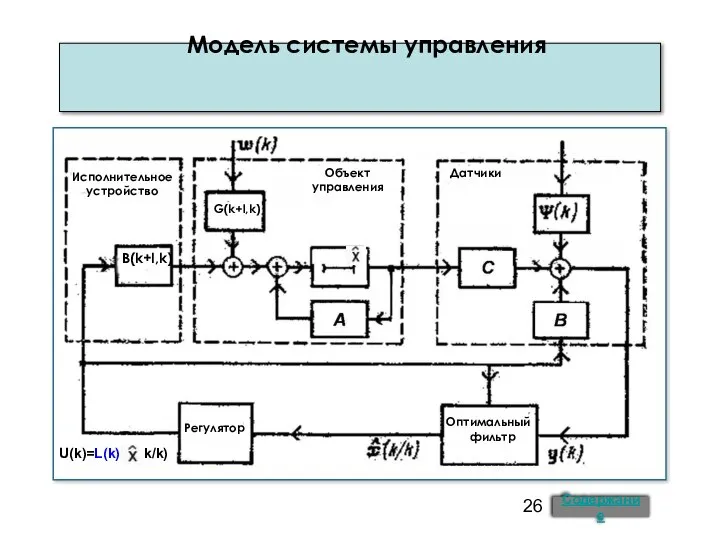
- 26. Модель системы управления Исполнительное устройство Объект управления Датчики G(k+l,k) B(k+l,k) Регулятор Оптимальный фильтр U(k)=L(k) (k/k) Содержание
- 27. На выходе регулятора имеем оптимальное управление aik = L(k)j.(k\k), где x(fc|ft) оптимальная оценка вектора состояния, получаемая
- 28. Одним из важных источников нарушений в ДС является канал измерения. Нарушения в канале измерения могут происходить
- 29. Основные особенности фильтра Калмана. фильтр представляет собой рекуррентный, удобный для реализации на ЭВМ, алгоритм вычисления оценки
- 30. алгоритмы фильтрации легко распространяются на многомерный случай(для многоканальных систем); так как параметры фильтра Калмана изменяются во
- 31. Вычислительная схема Фильтра Калмана Модель сообщения Модель канала Вход y(k) x(k) Вычисление P(k/k-1) Вычисление P(k/k) P
- 32. Динамика обработки информации x(k-2) y(k-2) x(k-1/k-2) Экстраполяция y(k-1) x(k/k-1) x(k/k-2)-пропуск ИЗМЕРЕНИЙ x(k) K(k)z(k/k-1) y(k) x(k+1) Z(k/k-1)
- 33. Динамика обработки информации x(k-2) y(k-2) x(k-1/k-2) Экстраполяция y(k-1) x(k/k-1) x(k/k) x(k) K(k)z(k/k-1) y(k) x(k+1) Z(k/k-1) y(k+1)
- 34. СТРОБЫ
- 35. Стробы
- 36. Динамика обработки информации x(k-2) y(k-2) x(k-1/k-2) Экстраполяция y(k-1) x(k/k-1) x(k/k) x(k) K(k)z(k/k-1) y(k) x(k+1) Z(k/k-1) y(k+1)
- 38. Скачать презентацию
1. Фильтрация Калмана. Введение 3
2. Анализ свойств Фильтра Калмана 9
2.1
1. Фильтрация Калмана. Введение 3
2. Анализ свойств Фильтра Калмана 9
2.1

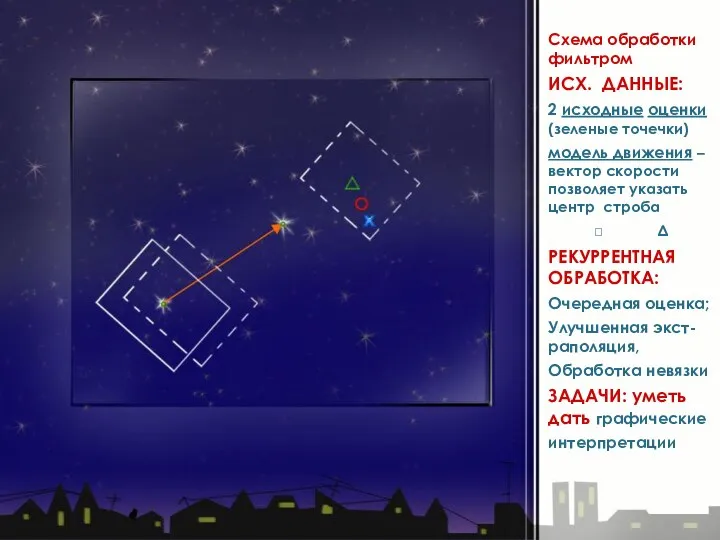
Схема обработки фильтром
ИСХ. ДАННЫЕ:
2 исходные оценки (зеленые точечки)
модель
Схема обработки фильтром
ИСХ. ДАННЫЕ:
2 исходные оценки (зеленые точечки)
модель

Содержание
Начальная
оценка
Подвижка:
“экстра-
поляция”
Обработка вектора
невязки
Модель экстраполяции
по опорным точкам оценок
ИЗМЕРЕНИЕ
Обработка измерений
Условные обозначения и этапы
Содержание
Начальная
оценка
Подвижка:
“экстра-
поляция”
Обработка вектора
невязки
Модель экстраполяции
по опорным точкам оценок
ИЗМЕРЕНИЕ
Обработка измерений
Условные обозначения и этапы
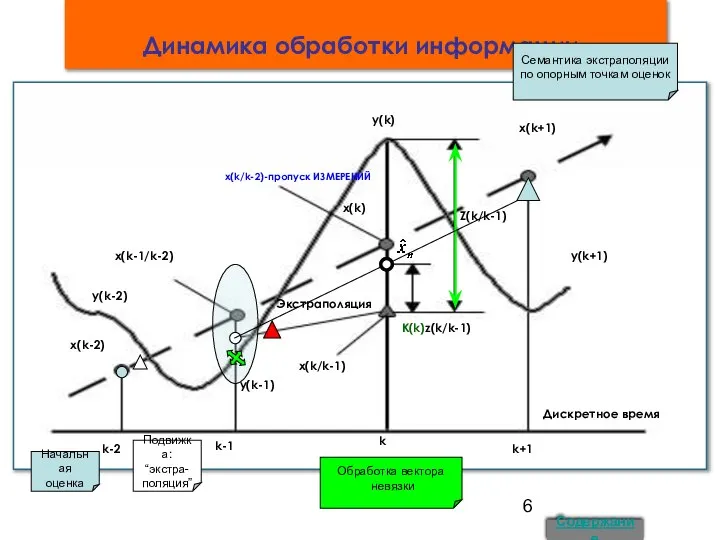
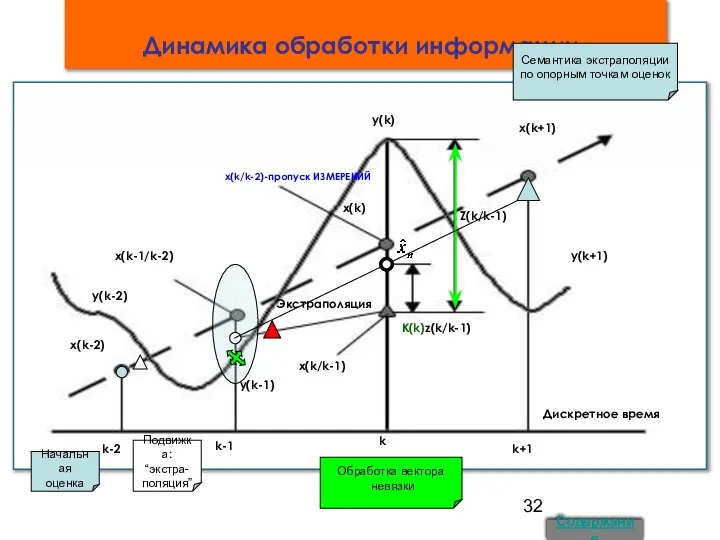
Динамика обработки информации
x(k-2)
y(k-2)
x(k-1/k-2)
Экстраполяция
y(k-1)
x(k/k-1)
x(k/k-2)-пропуск ИЗМЕРЕНИЙ
x(k)
K(k)z(k/k-1)
y(k)
x(k+1)
Z(k/k-1)
y(k+1)
Содержание
Начальная
оценка
Подвижка:
“экстра-
поляция”
Обработка вектора
невязки
Семантика экстраполяции
по опорным точкам оценок
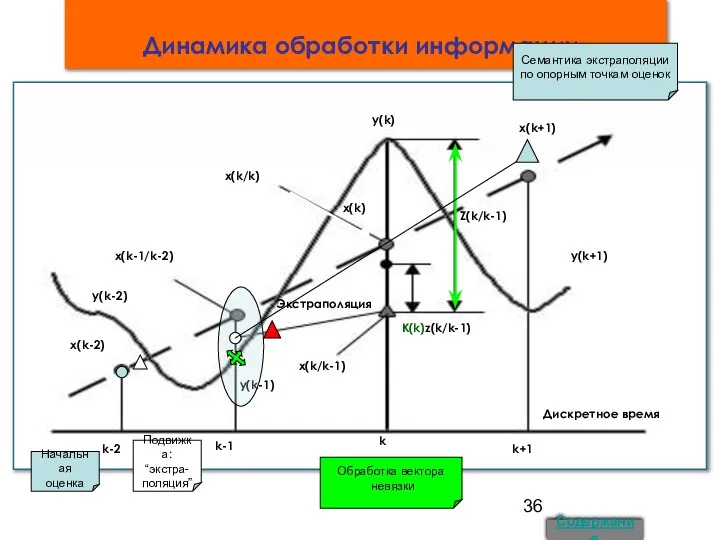
Динамика обработки информации
x(k-2)
y(k-2)
x(k-1/k-2)
Экстраполяция
y(k-1)
x(k/k-1)
x(k/k-2)-пропуск ИЗМЕРЕНИЙ
x(k)
K(k)z(k/k-1)
y(k)
x(k+1)
Z(k/k-1)
y(k+1)
Содержание
Начальная
оценка
Подвижка:
“экстра-
поляция”
Обработка вектора
невязки
Семантика экстраполяции
по опорным точкам оценок
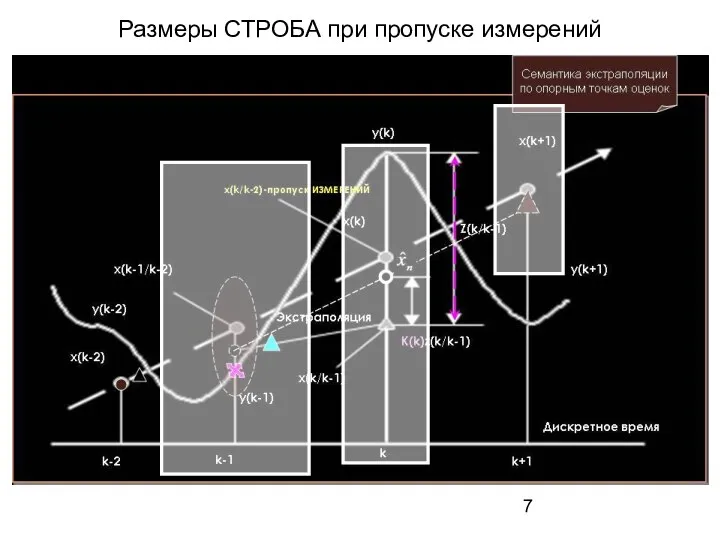
Размеры СТРОБА при пропуске измерений
Размеры СТРОБА при пропуске измерений
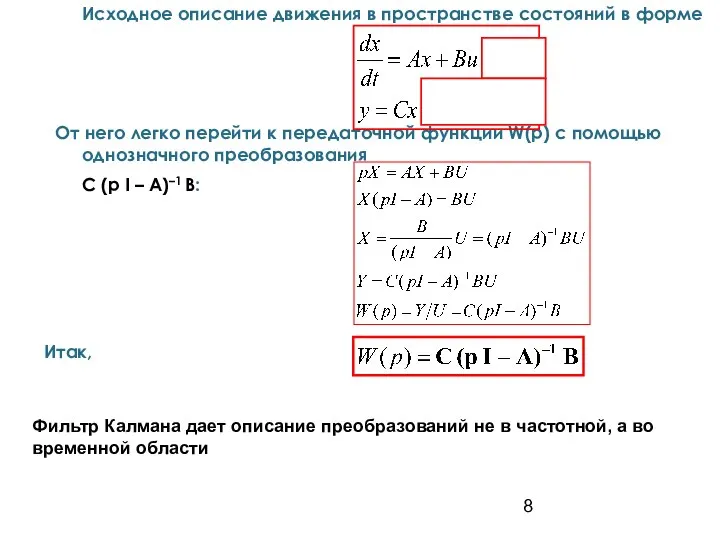
Исходное описание движения в пространстве состояний в форме
От него легко перейти
Исходное описание движения в пространстве состояний в форме
От него легко перейти
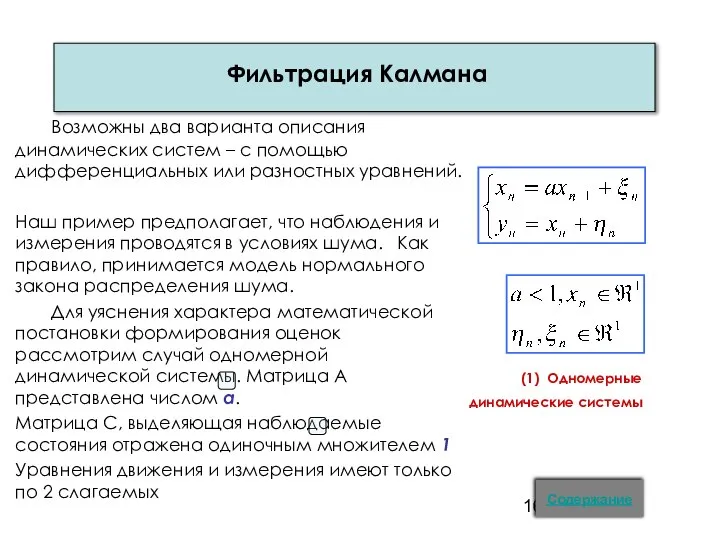
Фильтрация Калмана
Возможны два варианта описания динамических систем – с помощью дифференциальных
Фильтрация Калмана
Возможны два варианта описания динамических систем – с помощью дифференциальных
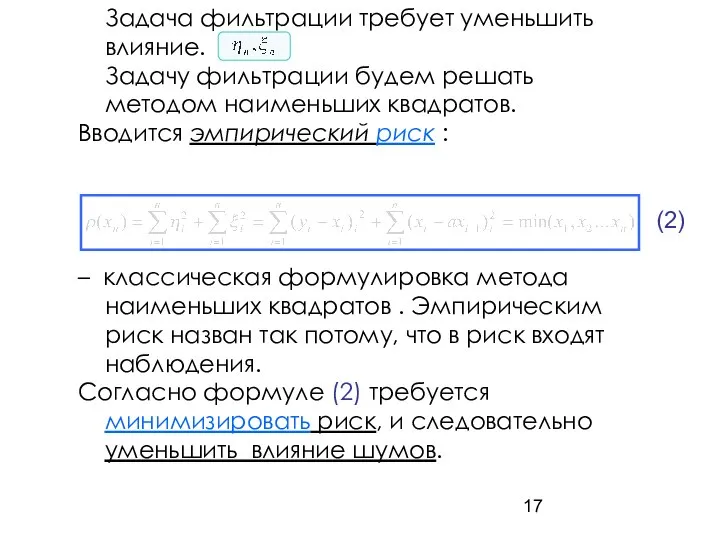
Задача фильтрации требует уменьшить влияние.
Задачу фильтрации будем решать методом наименьших квадратов.
Вводится
Задача фильтрации требует уменьшить влияние.
Задачу фильтрации будем решать методом наименьших квадратов.
Вводится
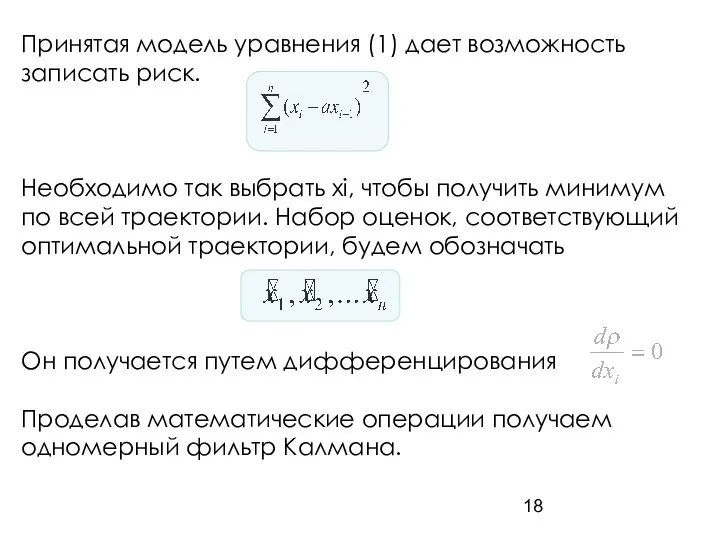
Принятая модель уравнения (1) дает возможность записать риск.
Необходимо так выбрать xi,
Принятая модель уравнения (1) дает возможность записать риск.
Необходимо так выбрать xi,
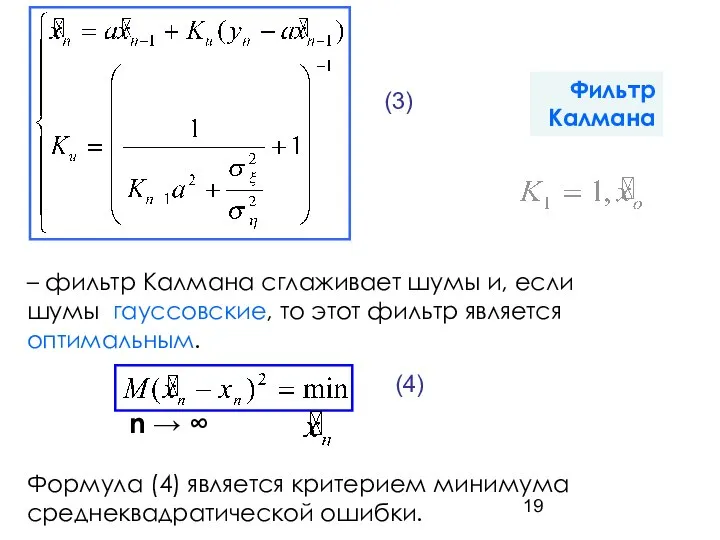
– фильтр Калмана сглаживает шумы и, если шумы гауссовские, то этот
– фильтр Калмана сглаживает шумы и, если шумы гауссовские, то этот
Фильтр Калмана дает оценку процесса истинного процесса для гауссовских шумов, оптимальную
Фильтр Калмана дает оценку процесса истинного процесса для гауссовских шумов, оптимальную
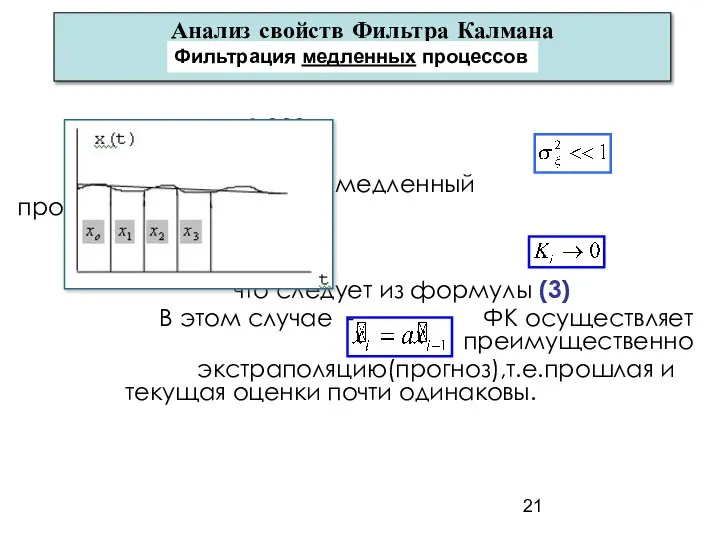
Анализ свойств Фильтра Калмана
При а=0.999 и
,
х(t)
Анализ свойств Фильтра Калмана
При а=0.999 и
,
х(t)
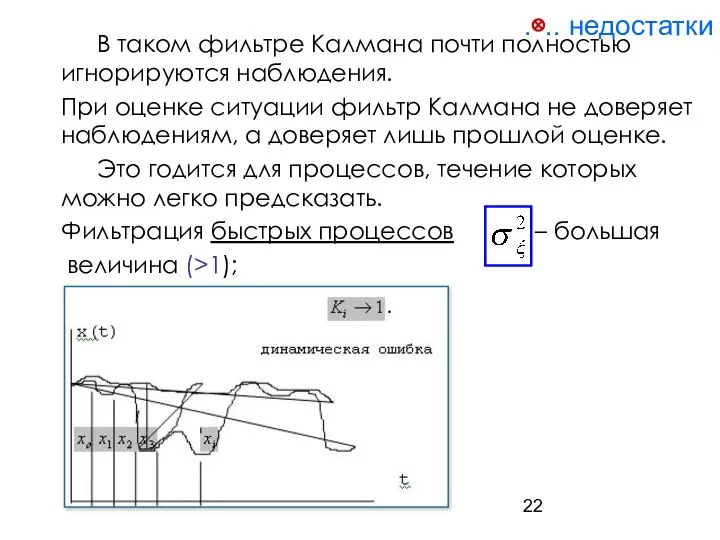
.⊗.. недостатки
В таком фильтре Калмана почти полностью игнорируются наблюдения.
При оценке
.⊗.. недостатки
В таком фильтре Калмана почти полностью игнорируются наблюдения.
При оценке
Тогда , в этом случае (оценка) равна самим наблюдениям. Это значит,
Тогда , в этом случае (оценка) равна самим наблюдениям. Это значит,
Модель нормального функционирования
системы передачи информации
1
С
x(k+1)
x(k)
y(k)
A
Ψ(k)
v(k)
ξ
(k/k)
Модель нормального функционирования
системы передачи информации
1
С
x(k+1)
x(k)
y(k)
A
Ψ(k)
v(k)
ξ
(k/k)
В первом случае вектор состояния системы x(fe) содержит в качестве своей
В первом случае вектор состояния системы x(fe) содержит в качестве своей
Модель системы управления
Исполнительное
устройство
Объект
управления
Датчики
G(k+l,k)
B(k+l,k)
Регулятор
Оптимальный
фильтр
U(k)=L(k) (k/k)
Содержание
Модель системы управления
Исполнительное
устройство
Объект
управления
Датчики
G(k+l,k)
B(k+l,k)
Регулятор
Оптимальный
фильтр
U(k)=L(k) (k/k)
Содержание
На выходе регулятора имеем оптимальное управление aik = L(k)j.(k\k), где x(fc|ft)
На выходе регулятора имеем оптимальное управление aik = L(k)j.(k\k), где x(fc|ft)
Одним из важных источников нарушений в ДС является канал измерения. Нарушения
Одним из важных источников нарушений в ДС является канал измерения. Нарушения
Основные особенности фильтра Калмана.
фильтр представляет собой рекуррентный, удобный для реализации на
Основные особенности фильтра Калмана.
фильтр представляет собой рекуррентный, удобный для реализации на
алгоритмы фильтрации легко распространяются на многомерный случай(для многоканальных систем);
так как параметры
алгоритмы фильтрации легко распространяются на многомерный случай(для многоканальных систем);
так как параметры
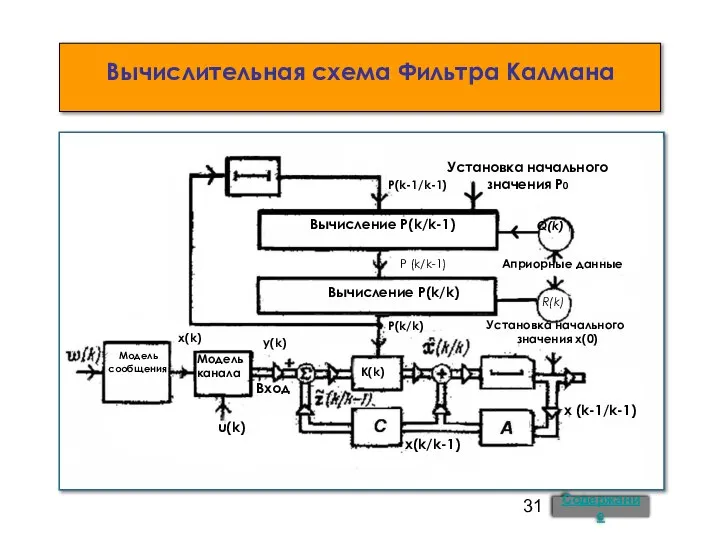
Вычислительная схема Фильтра Калмана
Модель
сообщения
Модель
канала
Вход
y(k)
x(k)
Вычисление P(k/k-1)
Вычисление P(k/k)
P (k/k-1)
P(k-1/k-1)
P(k/k)
Установка начального
Вычислительная схема Фильтра Калмана
Модель
сообщения
Модель
канала
Вход
y(k)
x(k)
Вычисление P(k/k-1)
Вычисление P(k/k)
P (k/k-1)
P(k-1/k-1)
P(k/k)
Установка начального
Динамика обработки информации
x(k-2)
y(k-2)
x(k-1/k-2)
Экстраполяция
y(k-1)
x(k/k-1)
x(k/k-2)-пропуск ИЗМЕРЕНИЙ
x(k)
K(k)z(k/k-1)
y(k)
x(k+1)
Z(k/k-1)
y(k+1)
Содержание
Начальная
оценка
Подвижка:
“экстра-
поляция”
Обработка вектора
невязки
Семантика экстраполяции
по опорным точкам оценок
Динамика обработки информации
x(k-2)
y(k-2)
x(k-1/k-2)
Экстраполяция
y(k-1)
x(k/k-1)
x(k/k-2)-пропуск ИЗМЕРЕНИЙ
x(k)
K(k)z(k/k-1)
y(k)
x(k+1)
Z(k/k-1)
y(k+1)
Содержание
Начальная
оценка
Подвижка:
“экстра-
поляция”
Обработка вектора
невязки
Семантика экстраполяции
по опорным точкам оценок
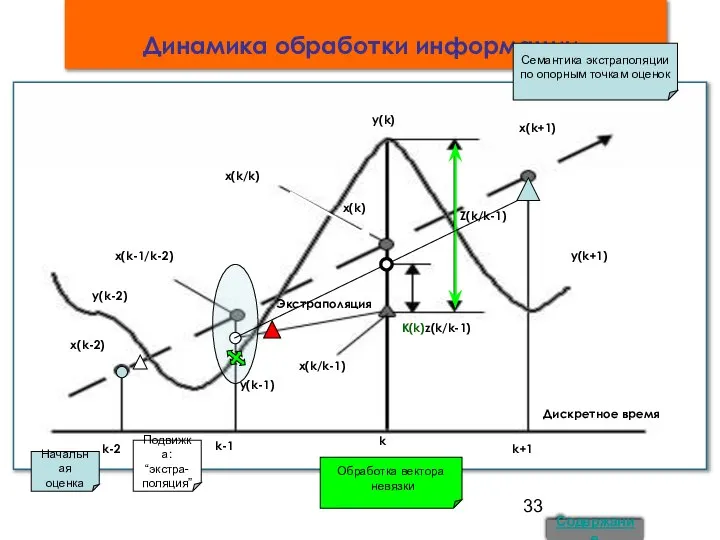
Динамика обработки информации
x(k-2)
y(k-2)
x(k-1/k-2)
Экстраполяция
y(k-1)
x(k/k-1)
x(k/k)
x(k)
K(k)z(k/k-1)
y(k)
x(k+1)
Z(k/k-1)
y(k+1)
Содержание
Начальная
оценка
Подвижка:
“экстра-
поляция”
Обработка вектора
невязки
Семантика экстраполяции
по опорным точкам оценок
Динамика обработки информации
x(k-2)
y(k-2)
x(k-1/k-2)
Экстраполяция
y(k-1)
x(k/k-1)
x(k/k)
x(k)
K(k)z(k/k-1)
y(k)
x(k+1)
Z(k/k-1)
y(k+1)
Содержание
Начальная
оценка
Подвижка:
“экстра-
поляция”
Обработка вектора
невязки
Семантика экстраполяции
по опорным точкам оценок
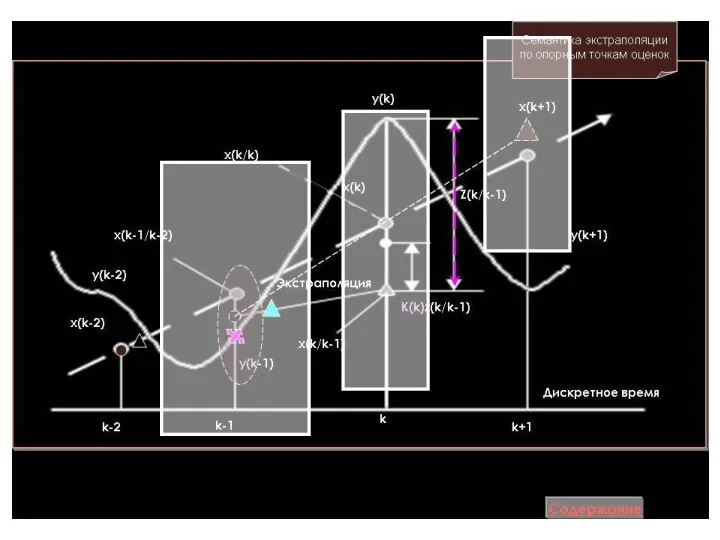
СТРОБЫ
СТРОБЫ
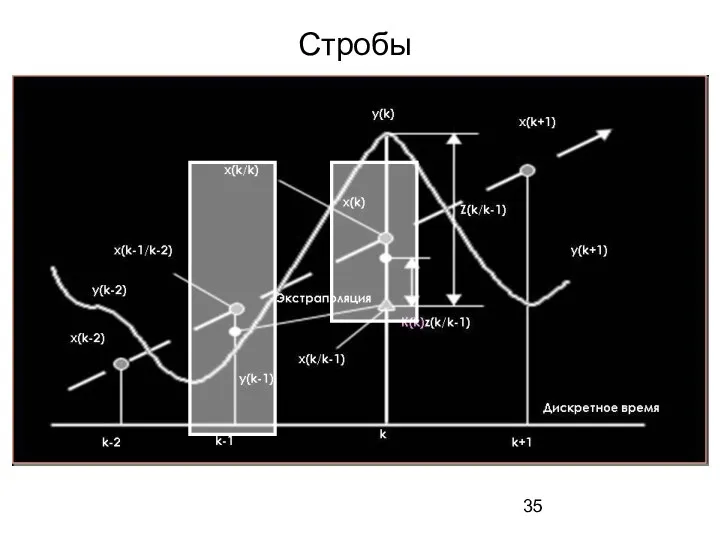
Стробы
Стробы
Динамика обработки информации
x(k-2)
y(k-2)
x(k-1/k-2)
Экстраполяция
y(k-1)
x(k/k-1)
x(k/k)
x(k)
K(k)z(k/k-1)
y(k)
x(k+1)
Z(k/k-1)
y(k+1)
Содержание
Начальная
оценка
Подвижка:
“экстра-
поляция”
Обработка вектора
невязки
Семантика экстраполяции
по опорным точкам оценок
Динамика обработки информации
x(k-2)
y(k-2)
x(k-1/k-2)
Экстраполяция
y(k-1)
x(k/k-1)
x(k/k)
x(k)
K(k)z(k/k-1)
y(k)
x(k+1)
Z(k/k-1)
y(k+1)
Содержание
Начальная
оценка
Подвижка:
“экстра-
поляция”
Обработка вектора
невязки
Семантика экстраполяции
по опорным точкам оценок
 Решение уравнения cosx = a. Понятие арккосинуса числа
Решение уравнения cosx = a. Понятие арккосинуса числа Урок - морское путешествие
Урок - морское путешествие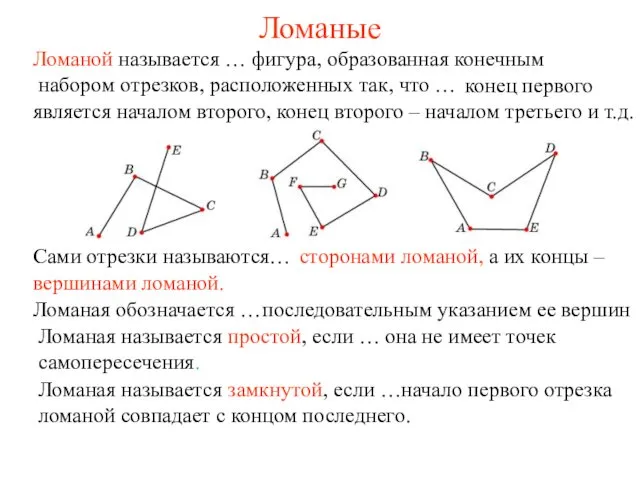 Ломаные и многоугольники
Ломаные и многоугольники Одночлен. 7 класс
Одночлен. 7 класс Вычисления с рациональными числами
Вычисления с рациональными числами Преобразования графиков тригонометрических функций с модулем
Преобразования графиков тригонометрических функций с модулем Презентация по математике "О математическом языке" - скачать бесплатно
Презентация по математике "О математическом языке" - скачать бесплатно Выборочное наблюдение
Выборочное наблюдение Тема урока
Тема урока  Решение задач с практическим содержанием
Решение задач с практическим содержанием Векторна алгебра
Векторна алгебра Доли
Доли Это страшное слово: «Параметр»
Это страшное слово: «Параметр» Путешествие в страну обыкновенных дробей
Путешествие в страну обыкновенных дробей Логика. Доказательство и опровержение
Логика. Доказательство и опровержение Муниципальное бюджетное общеобразовательное учреждение гимназия №1 г. Североморск
Муниципальное бюджетное общеобразовательное учреждение гимназия №1 г. Североморск  Математические бои
Математические бои Методы математической статистики в психологопедагогических исследованиях
Методы математической статистики в психологопедагогических исследованиях Многоугольники
Многоугольники Квадратичная функция. Преобразование графика параболы путем параллельного переноса вдоль осей абцисс и ординат
Квадратичная функция. Преобразование графика параболы путем параллельного переноса вдоль осей абцисс и ординат Прямоугольник. Урок математики. 2 класс
Прямоугольник. Урок математики. 2 класс Решение треугольников
Решение треугольников Подобные треугольники. Подобные фигуры
Подобные треугольники. Подобные фигуры Свойства числовых неравенств
Свойства числовых неравенств Случаи сложения и вычитания, основанные на знании нумерации чиселм
Случаи сложения и вычитания, основанные на знании нумерации чиселм Тест по теме: "Пирамида". Часть 2. Вариант 2
Тест по теме: "Пирамида". Часть 2. Вариант 2 Функции нескольких переменных. Частные производные
Функции нескольких переменных. Частные производные Параллельность прямой и плоскости. Решение задач
Параллельность прямой и плоскости. Решение задач