- Геометрия в 3D-пространстве

Содержание
- 2. КООРДИНАТЫ ТОЧКИ В трехмерном пространстве положение каждой точки задается набором из 3 вещественных чисел – координат
- 3. ДЕКАРТОВА СК
- 4. СФЕРИЧЕСКИЕ КООРДИНАТЫ Сферические координаты являются обобщением полярных координат на случай трехмерного пространства, получаемого путем добавления еще
- 5. СФЕРИЧЕСКАЯ СК
- 6. ВЗАИМОСВЯЗЬ ДЕКАРТОВЫХ И СФЕРИЧЕСКИХ КООРДИНАТ
- 7. ОБЪЕКТЫ КОНЕЧНЫХ РАЗМЕРОВ Для объектов конечных размеров необходимо указывать не только их положение, но и ориентацию
- 8. ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ Любой поворот в трехмерном пространстве может быть выполнен как последовательность 3-х поворотов,
- 9. ЭЙЛЕРОВЫ УГЛЫ Согласно Эйлеру для этого необходимо выполнить следующую последовательность поворотов поворот вокруг оси Z’ на
- 10. ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
- 11. ФОРМУЛЫ ПРЕОБРАЗОВАНИЙ
- 12. АЛГОРИТМЫ ПРОЕЦИРОВАНИЯ
- 13. ЗАДАЧА ПРОЕЦИРОВАНИЯ Отображение некоторого множества точек S пространства Rn на другое пространство Rm той же или
- 14. ПОСТРОЕНИЕ ПРОЕКЦИЙ Для построения проекции выбирается некоторая точка – центр проецирования – и плоскость проецирования или
- 15. ВИДЫ ПРОЕКЦИЙ Если в качестве центра проецирования выбирается собственная точка пространства R3, то проекция называется центральной
- 16. ВИДЫ ПАРАЛЛЕЛЬНЫХ ПРОЕКЦИЙ В зависимости от расположения картинной плоскости и координатных осей мировой системы координат параллельные
- 17. ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ Картинная плоскость совпадает с одной из координатных плоскостей или параллельна ей. Матрица проецирования вдоль
- 18. ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ В случае, если картинная плоскость параллельна плоскости YZ, матрица проецирования умножается на матрицу параллельного
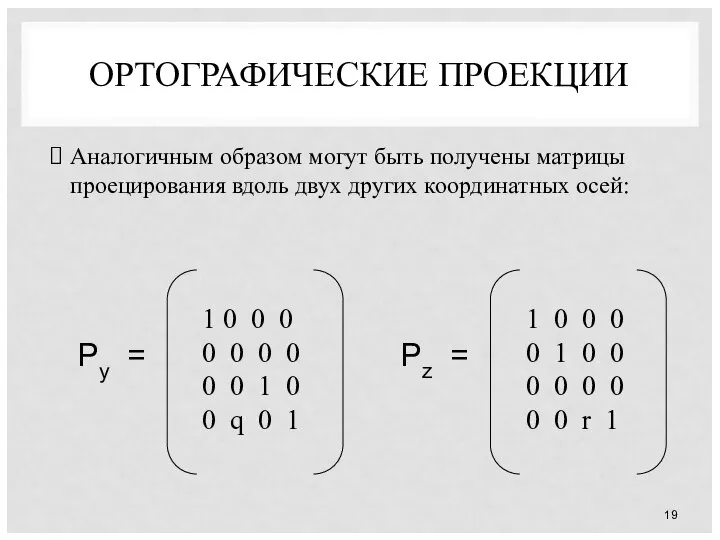
- 19. ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ Аналогичным образом могут быть получены матрицы проецирования вдоль двух других координатных осей:
- 20. ВЫРОЖДЕННОСТЬ МАТРИЦ Матрицы проецирования являются вырожденными, т.е. проецирование является необратимой операцией Это отражает тот очевидный факт,
- 21. АКСОНОМЕТРИЧЕСКИЕ ПРОЕКЦИИ При аксонометрической проекции проектирующие прямые перпендикулярны картинной плоскости. В соответствии со взаимным расположением картинной
- 22. ВИДЫ АКСОНОМЕТРИЧЕСКИХ ПРОЕКЦИЙ Триметрическая проекция – нормальный вектор картинной плоскости образует с ортами координатных осей попарно
- 23. ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ Любая аксонометрическая проекция может быть получена комбинацией поворота до совмещения нормали к картинной
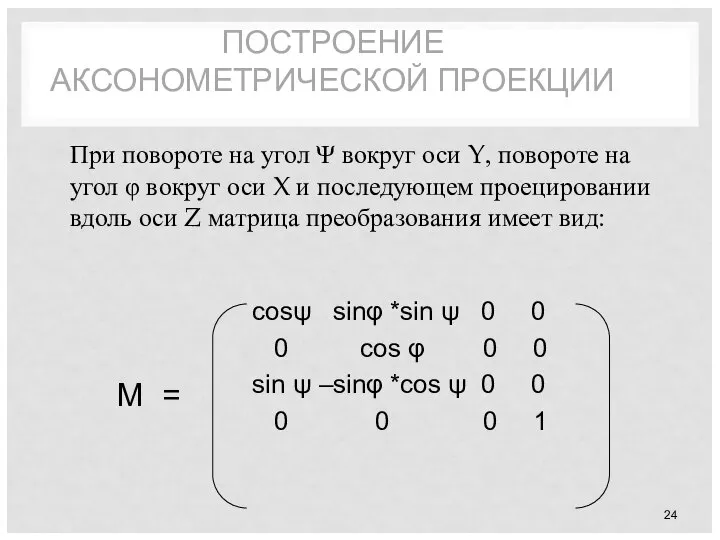
- 24. ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ При повороте на угол Ψ вокруг оси Y, повороте на угол φ вокруг
- 25. ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ Эта матрица получается в результате перемножения трех матриц – Ry, Rx и Pz:
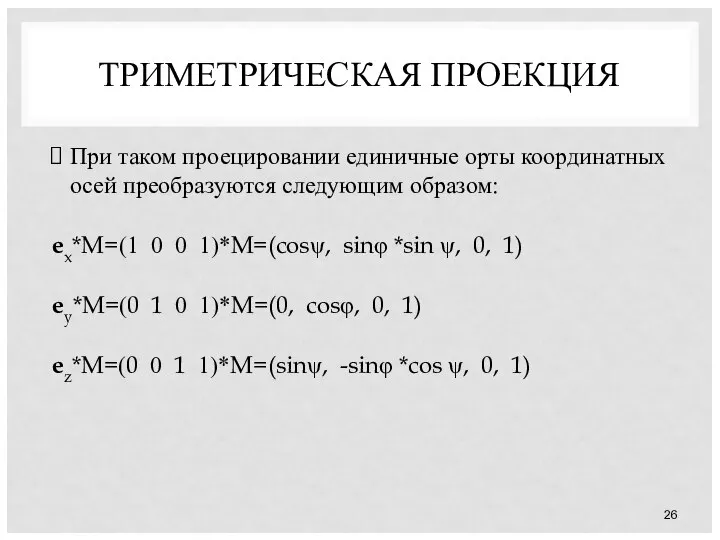
- 26. ТРИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ При таком проецировании единичные орты координатных осей преобразуются следующим образом: ex*M=(1 0 0 1)*M=(cosψ,
- 27. ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ Равенство углов между нормалью к картинной плоскости и двумя координатными осями означает равенство проекций
- 28. ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ Отсюда следует, что sin2 ψ = tg2 φ Теперь углы поворота вокруг осей ординат
- 29. ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ Аналогичным образом могут быть рассмотрены две другие диметрические проекции, соответствующие другим возможным выборам пар
- 30. СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ Тогда из условий sin2 ψ = tg2 φ и cos2 φ = 4*(sin2
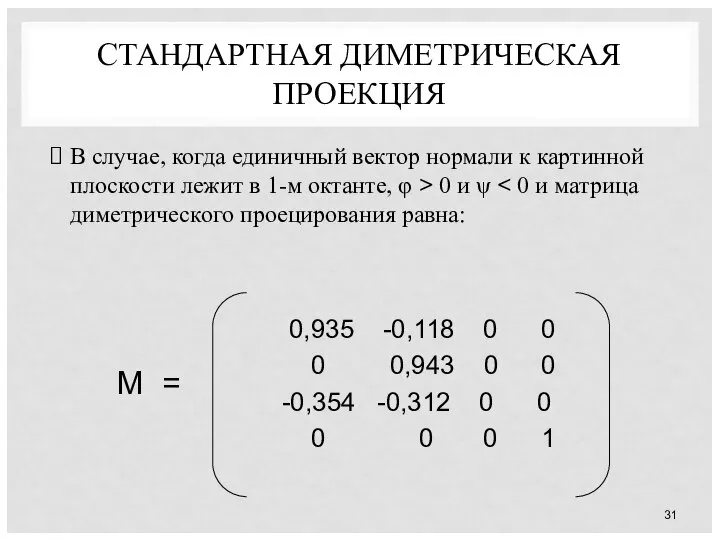
- 31. СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ В случае, когда единичный вектор нормали к картинной плоскости лежит в 1-м октанте,
- 32. ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ В этом случае все три проекции единичных ортов равны между собой, что приводит к
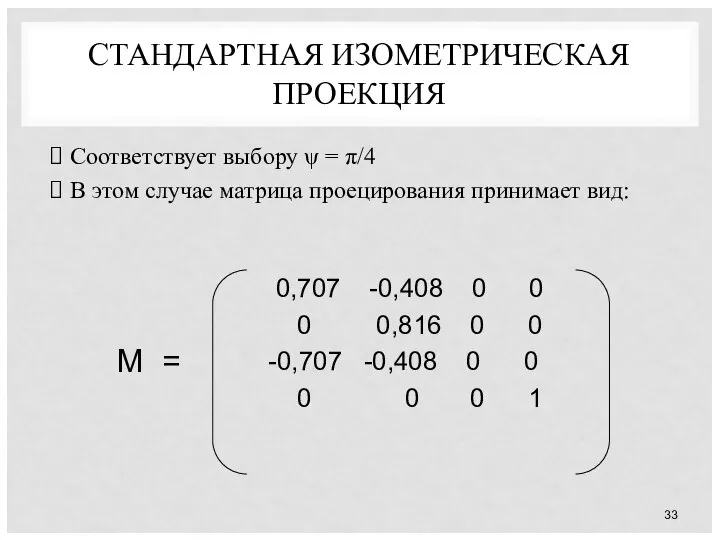
- 33. СТАНДАРТНАЯ ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ Соответствует выбору ψ = π/4 В этом случае матрица проецирования принимает вид:
- 34. КОСОУГОЛЬНЫЕ ПРОЕКЦИИ При косоугольном проецировании пучок проецирующих лучей не перпендикулярен картинной плоскости. Косоугольные проекции сочетают в
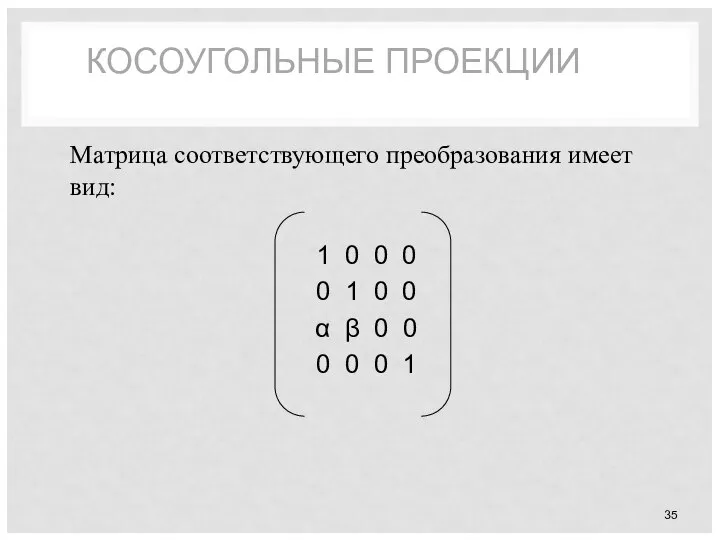
- 35. КОСОУГОЛЬНЫЕ ПРОЕКЦИИ Матрица соответствующего преобразования имеет вид:
- 36. ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ Выделяют два вида косоугольных проекций: свободную, кабинетную. В случае свободной проекции угол наклона
- 37. ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ Кабинетная проекция является частным случаем свободной проекции – масштаб по оси Z вдвое
- 38. ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ Пусть центр проецирования – точка C с координатами (0, 0, c) на оси Z
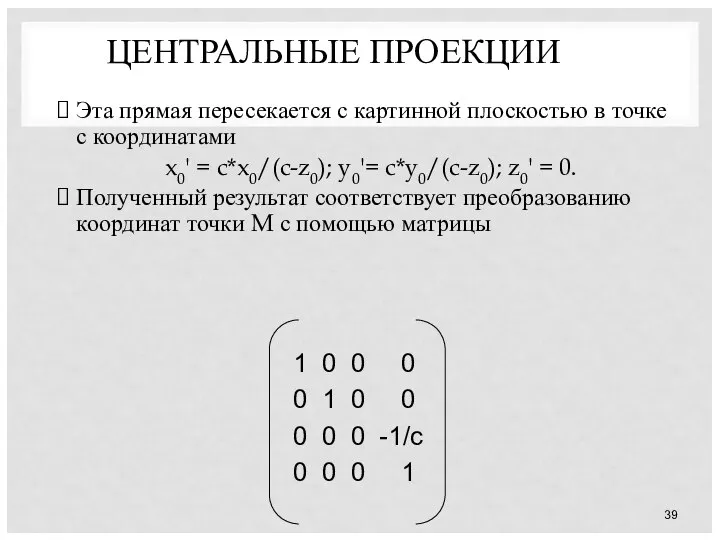
- 39. ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ Эта прямая пересекается с картинной плоскостью в точке с координатами x0' = c*x0/(c-z0); y0'=
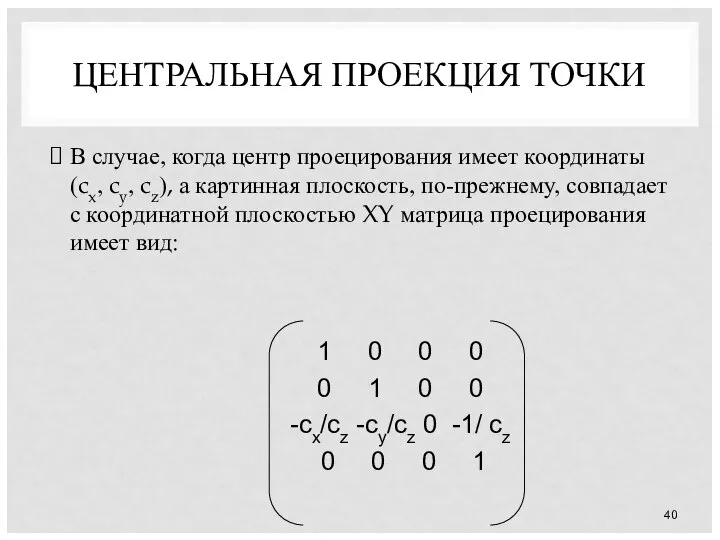
- 40. ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ В случае, когда центр проецирования имеет координаты (cx, cy, cz), а картинная плоскость,
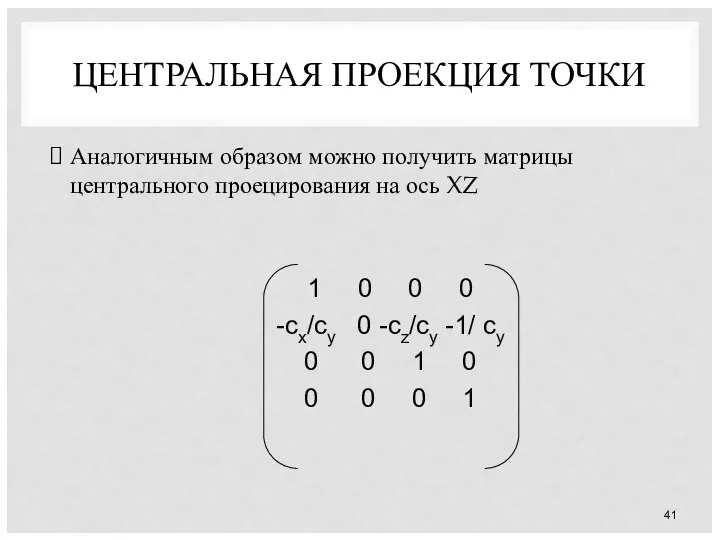
- 41. ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ Аналогичным образом можно получить матрицы центрального проецирования на ось XZ
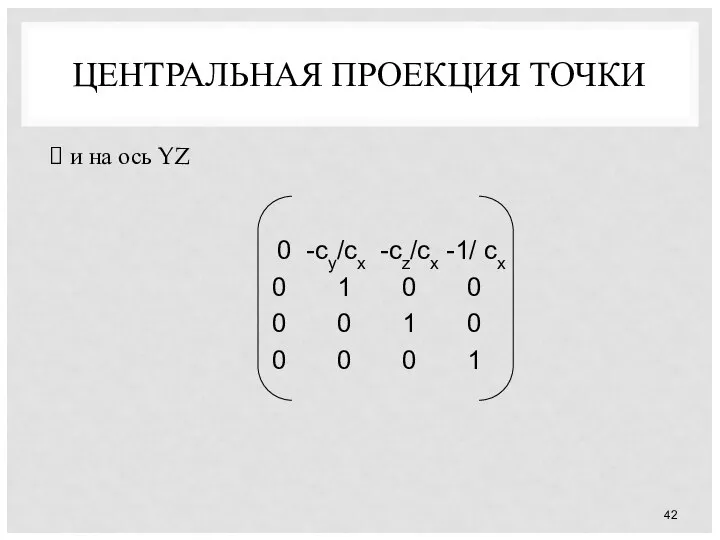
- 42. ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ и на ось YZ
- 43. ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ПРЯМОЙ Центральной проекцией прямой также является прямая. Пусть p(t) = p0 + Vt При
- 45. Скачать презентацию
КООРДИНАТЫ ТОЧКИ
В трехмерном пространстве положение каждой точки задается набором из
КООРДИНАТЫ ТОЧКИ
В трехмерном пространстве положение каждой точки задается набором из
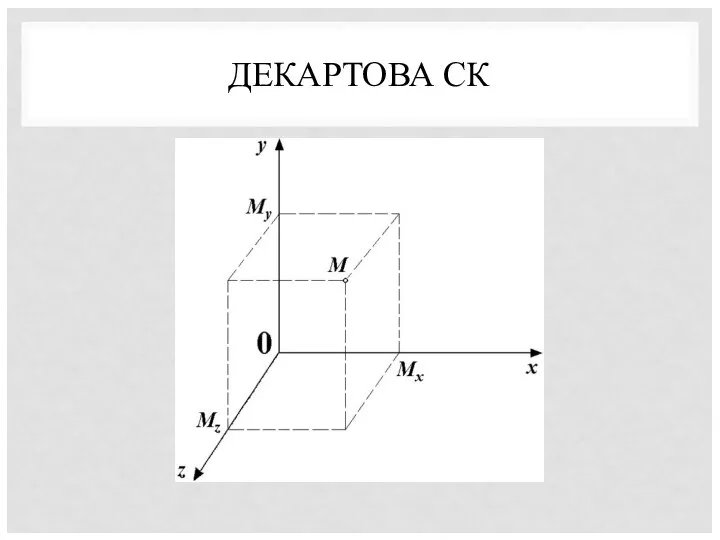
ДЕКАРТОВА СК
ДЕКАРТОВА СК
СФЕРИЧЕСКИЕ КООРДИНАТЫ
Сферические координаты являются обобщением полярных координат на случай трехмерного
СФЕРИЧЕСКИЕ КООРДИНАТЫ
Сферические координаты являются обобщением полярных координат на случай трехмерного
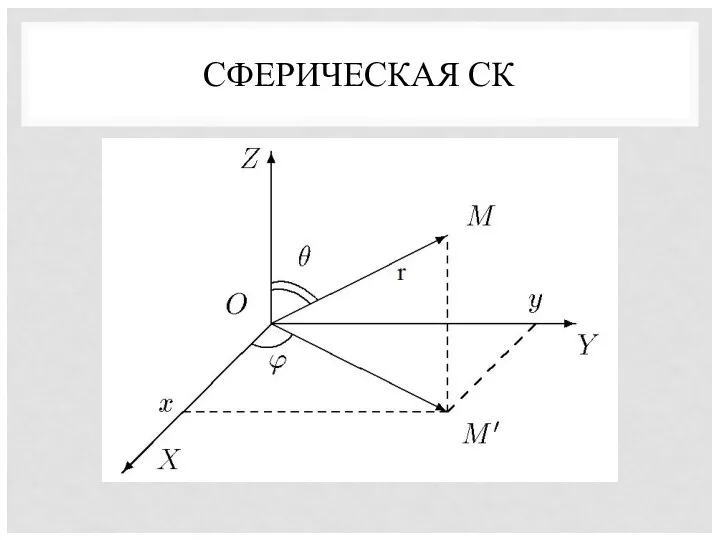
СФЕРИЧЕСКАЯ СК
СФЕРИЧЕСКАЯ СК
ВЗАИМОСВЯЗЬ ДЕКАРТОВЫХ И СФЕРИЧЕСКИХ КООРДИНАТ
ВЗАИМОСВЯЗЬ ДЕКАРТОВЫХ И СФЕРИЧЕСКИХ КООРДИНАТ
ОБЪЕКТЫ КОНЕЧНЫХ РАЗМЕРОВ
Для объектов конечных размеров необходимо указывать не только
ОБЪЕКТЫ КОНЕЧНЫХ РАЗМЕРОВ
Для объектов конечных размеров необходимо указывать не только
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
Любой поворот в трехмерном пространстве может быть выполнен
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
Любой поворот в трехмерном пространстве может быть выполнен
ЭЙЛЕРОВЫ УГЛЫ
Согласно Эйлеру для этого необходимо выполнить следующую последовательность поворотов
поворот вокруг
ЭЙЛЕРОВЫ УГЛЫ
Согласно Эйлеру для этого необходимо выполнить следующую последовательность поворотов
поворот вокруг

ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
ПОВОРОТ ОБЪЕКТНОЙ СИСТЕМЫ КООРДИНАТ
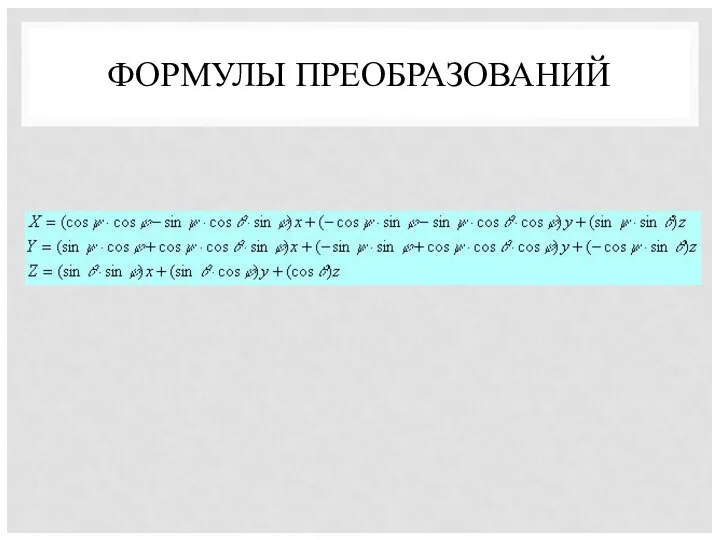
ФОРМУЛЫ ПРЕОБРАЗОВАНИЙ
ФОРМУЛЫ ПРЕОБРАЗОВАНИЙ
АЛГОРИТМЫ ПРОЕЦИРОВАНИЯ
АЛГОРИТМЫ ПРОЕЦИРОВАНИЯ
ЗАДАЧА ПРОЕЦИРОВАНИЯ
Отображение некоторого множества точек S пространства Rn на другое пространство
ЗАДАЧА ПРОЕЦИРОВАНИЯ
Отображение некоторого множества точек S пространства Rn на другое пространство
ПОСТРОЕНИЕ ПРОЕКЦИЙ
Для построения проекции выбирается некоторая точка – центр проецирования –
ПОСТРОЕНИЕ ПРОЕКЦИЙ
Для построения проекции выбирается некоторая точка – центр проецирования –
ВИДЫ ПРОЕКЦИЙ
Если в качестве центра проецирования выбирается собственная точка пространства R3,
ВИДЫ ПРОЕКЦИЙ
Если в качестве центра проецирования выбирается собственная точка пространства R3,
ВИДЫ ПАРАЛЛЕЛЬНЫХ ПРОЕКЦИЙ
В зависимости от расположения картинной плоскости и координатных осей
ВИДЫ ПАРАЛЛЕЛЬНЫХ ПРОЕКЦИЙ
В зависимости от расположения картинной плоскости и координатных осей
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
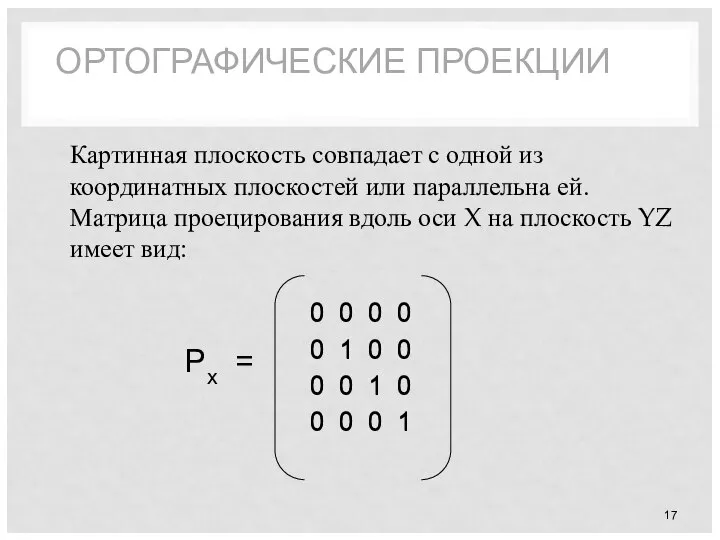
Картинная плоскость совпадает с одной из координатных плоскостей или параллельна
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
Картинная плоскость совпадает с одной из координатных плоскостей или параллельна
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
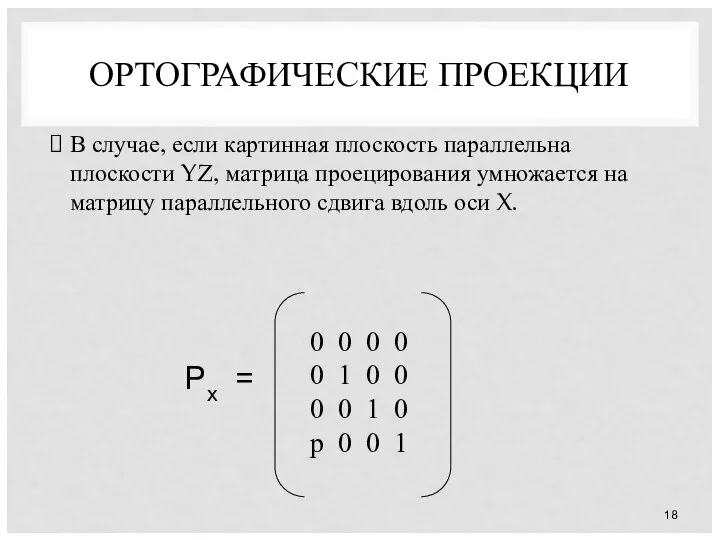
В случае, если картинная плоскость параллельна плоскости YZ, матрица проецирования
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
В случае, если картинная плоскость параллельна плоскости YZ, матрица проецирования
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
Аналогичным образом могут быть получены матрицы проецирования вдоль двух других
ОРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
Аналогичным образом могут быть получены матрицы проецирования вдоль двух других
ВЫРОЖДЕННОСТЬ МАТРИЦ
Матрицы проецирования являются вырожденными, т.е. проецирование является необратимой операцией
Это
ВЫРОЖДЕННОСТЬ МАТРИЦ
Матрицы проецирования являются вырожденными, т.е. проецирование является необратимой операцией
Это
АКСОНОМЕТРИЧЕСКИЕ ПРОЕКЦИИ
При аксонометрической проекции проектирующие прямые перпендикулярны картинной плоскости. В соответствии
АКСОНОМЕТРИЧЕСКИЕ ПРОЕКЦИИ
При аксонометрической проекции проектирующие прямые перпендикулярны картинной плоскости. В соответствии
ВИДЫ АКСОНОМЕТРИЧЕСКИХ ПРОЕКЦИЙ
Триметрическая проекция – нормальный вектор картинной плоскости образует с
ВИДЫ АКСОНОМЕТРИЧЕСКИХ ПРОЕКЦИЙ
Триметрическая проекция – нормальный вектор картинной плоскости образует с
ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ
Любая аксонометрическая проекция может быть получена комбинацией поворота до
ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ
Любая аксонометрическая проекция может быть получена комбинацией поворота до
ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ
При повороте на угол Ψ вокруг оси Y, повороте
ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ
При повороте на угол Ψ вокруг оси Y, повороте
ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ
Эта матрица получается в результате перемножения трех матриц –
ПОСТРОЕНИЕ АКСОНОМЕТРИЧЕСКОЙ ПРОЕКЦИИ
Эта матрица получается в результате перемножения трех матриц –
ТРИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
При таком проецировании единичные орты координатных осей преобразуются следующим образом:
ex*M=(1
ТРИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
При таком проецировании единичные орты координатных осей преобразуются следующим образом:
ex*M=(1
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Равенство углов между нормалью к картинной плоскости и двумя координатными
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Равенство углов между нормалью к картинной плоскости и двумя координатными
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Отсюда следует, что
sin2 ψ = tg2 φ
Теперь углы
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Отсюда следует, что
sin2 ψ = tg2 φ
Теперь углы
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Аналогичным образом могут быть рассмотрены две другие диметрические проекции, соответствующие
ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Аналогичным образом могут быть рассмотрены две другие диметрические проекции, соответствующие
СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Тогда из условий
sin2 ψ = tg2 φ
и
cos2
СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Тогда из условий
sin2 ψ = tg2 φ
и
cos2
СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
В случае, когда единичный вектор нормали к картинной плоскости
СТАНДАРТНАЯ ДИМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
В случае, когда единичный вектор нормали к картинной плоскости
ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
В этом случае все три проекции единичных ортов равны между
ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
В этом случае все три проекции единичных ортов равны между
СТАНДАРТНАЯ ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Соответствует выбору ψ = π/4
В этом случае матрица
СТАНДАРТНАЯ ИЗОМЕТРИЧЕСКАЯ ПРОЕКЦИЯ
Соответствует выбору ψ = π/4
В этом случае матрица
КОСОУГОЛЬНЫЕ ПРОЕКЦИИ
При косоугольном проецировании пучок проецирующих лучей не перпендикулярен картинной плоскости.
КОСОУГОЛЬНЫЕ ПРОЕКЦИИ
При косоугольном проецировании пучок проецирующих лучей не перпендикулярен картинной плоскости.
КОСОУГОЛЬНЫЕ ПРОЕКЦИИ
Матрица соответствующего преобразования имеет вид:
КОСОУГОЛЬНЫЕ ПРОЕКЦИИ
Матрица соответствующего преобразования имеет вид:
ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ
Выделяют два вида косоугольных проекций:
свободную,
кабинетную.
В случае свободной проекции угол
ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ
Выделяют два вида косоугольных проекций:
свободную,
кабинетную.
В случае свободной проекции угол
ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ
Кабинетная проекция является частным случаем свободной проекции – масштаб
ВИДЫ КОСОУГОЛЬНЫХ ПРОЕКЦИЙ
Кабинетная проекция является частным случаем свободной проекции – масштаб
ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ
Пусть центр проецирования – точка C с координатами (0, 0,
ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ
Пусть центр проецирования – точка C с координатами (0, 0,
ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ
Эта прямая пересекается с картинной плоскостью в точке с координатами
x0'
ЦЕНТРАЛЬНЫЕ ПРОЕКЦИИ
Эта прямая пересекается с картинной плоскостью в точке с координатами
x0'
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
В случае, когда центр проецирования имеет координаты (cx, cy,
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
В случае, когда центр проецирования имеет координаты (cx, cy,
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
Аналогичным образом можно получить матрицы центрального проецирования на ось
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
Аналогичным образом можно получить матрицы центрального проецирования на ось
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
и на ось YZ
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ТОЧКИ
и на ось YZ
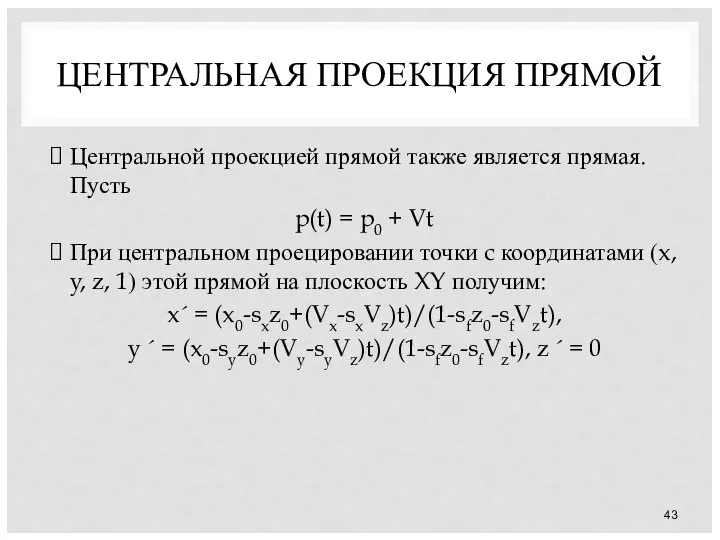
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ПРЯМОЙ
Центральной проекцией прямой также является прямая. Пусть
p(t) =
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ ПРЯМОЙ
Центральной проекцией прямой также является прямая. Пусть
p(t) =
 Презентация по математике "Использование игровых моментов при повторении на уроках математики в 5-ых классах" - скачать
Презентация по математике "Использование игровых моментов при повторении на уроках математики в 5-ых классах" - скачать  Преобразование выражений, содержащих квадратные корни
Преобразование выражений, содержащих квадратные корни Свойства параллельных прямых
Свойства параллельных прямых Непрерывные функции и их свойства. Асимптоты
Непрерывные функции и их свойства. Асимптоты Решение задач
Решение задач Не отрывая карандаша
Не отрывая карандаша Преобразование выражений, содержащих степени
Преобразование выражений, содержащих степени Приемы развития критического мышления Выполнила учитель математики МКОУ ВСОШ №2 Зайцева В.В.
Приемы развития критического мышления Выполнила учитель математики МКОУ ВСОШ №2 Зайцева В.В. Меры длины
Меры длины График функции у = f(х
График функции у = f(х Презентация на тему Решение задач на нахождение неизвестного по двум разностям (практический материал)
Презентация на тему Решение задач на нахождение неизвестного по двум разностям (практический материал)  Значение синуса, косинуса и тангенса для углов 30°, 45°, 60°
Значение синуса, косинуса и тангенса для углов 30°, 45°, 60° Графики функций. (9 класс)
Графики функций. (9 класс) Тригонометрия. Формулы тригонометрии
Тригонометрия. Формулы тригонометрии Биссектриса угла
Биссектриса угла Единицы измерения площадей
Единицы измерения площадей Деление дробей
Деление дробей Решение задач по теории вероятности
Решение задач по теории вероятности Непрерывность функции на отрезке
Непрерывность функции на отрезке Своя игра «Отношения и пропорция»
Своя игра «Отношения и пропорция» Алгебра высказываний при решении логических задач. Дизъюнктивные нормальные формы Лекция 3
Алгебра высказываний при решении логических задач. Дизъюнктивные нормальные формы Лекция 3 Комплексные числа и последовательности комплексных чисел. Лекция № 1
Комплексные числа и последовательности комплексных чисел. Лекция № 1 Оценка погрешности измерений
Оценка погрешности измерений Прямоугольник, ромб, квадрат
Прямоугольник, ромб, квадрат Рахуймо швидко з маленькою феєю
Рахуймо швидко з маленькою феєю Транспортная задача
Транспортная задача Изучение сформированности представлений о единицах времени у четвероклассников на уроках математики
Изучение сформированности представлений о единицах времени у четвероклассников на уроках математики Понятие о статистике и основных ее категориях. Формы представления данных. Сводка и группировка
Понятие о статистике и основных ее категориях. Формы представления данных. Сводка и группировка