- Моделирование системы управления продольным движением самолета

Содержание
- 2. Моделирование – осуществление имитационных экспериментов при помощи построения некоторой системы-модели, которая является подобием системы-оригинала для изучения
- 3. Линеаризованная модель движения судна при изменении курса может быть записана в виде: (1) - отклонение угла
- 4. Для моделирования необходимо сначала привести модель в дискретный вид. Дискретная система будет описываться следующим уравнением: где
- 5. Синтез управляющих воздействий модели объекта по оценкам состояния. Синтез управляющих воздействий при неполном измерении. Синтез адаптивной
- 6. Синтез управляющих воздействий модели объекта по оценкам состояния.
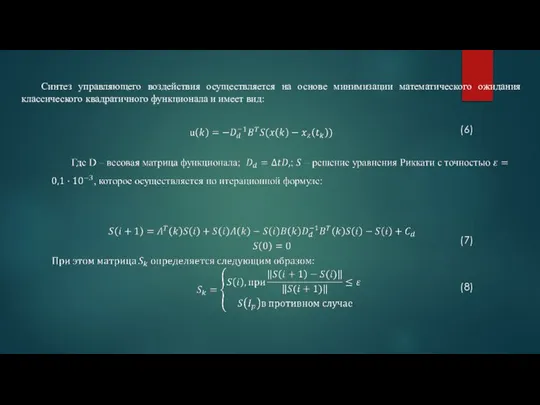
- 7. Синтез управляющего воздействия осуществляется на основе минимизации математического ожидания классического квадратичного функционала и имеет вид: (7)
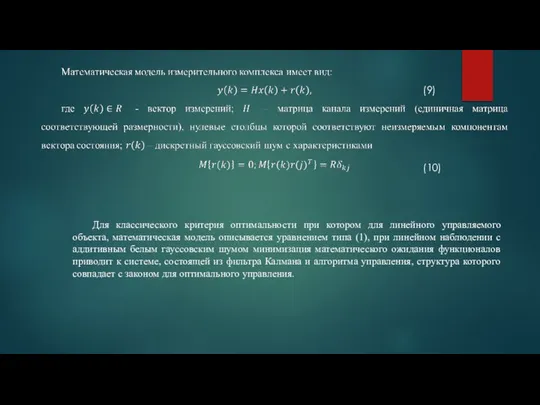
- 8. (9) (10) Для классического критерия оптимальности при котором для линейного управляемого объекта, математическая модель описывается уравнением
- 10. Результаты График изменения угла отклонения руля
- 11. Графики изменения вектора состояния и его оценка
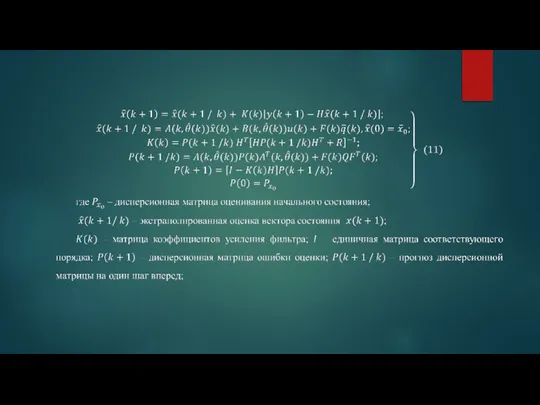
- 12. Синтез управляющих воздействий при неполном измерении.
- 13. Методы синтеза управляющих воздействий при неполном измерении отличаются от методов синтеза по оценкам состояния лишь матрицей
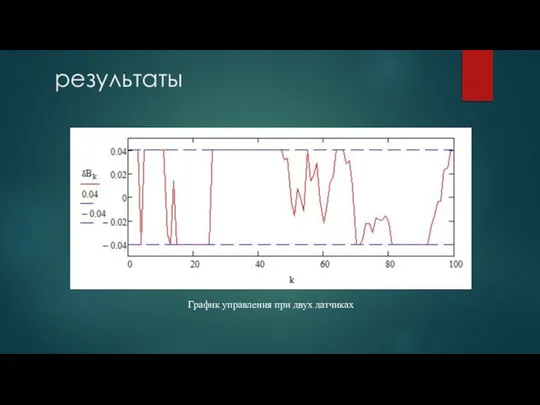
- 14. результаты График управления при двух датчиках
- 15. Графики изменения вектора состояния и его оценка, для двух датчиков
- 16. Синтез адаптивной системы управления.
- 17. (13)
- 18. (14) (15)
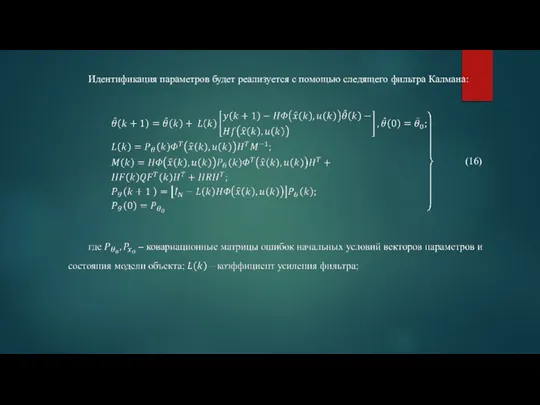
- 19. Идентификация параметров будет реализуется с помощью следящего фильтра Калмана: (16)
- 20. В данном случае вектор неизвестных параметров содержит следующие элементы: Матрица Φ имеет вид:
- 21. Результаты График адаптивного управления
- 22. Графики изменения вектора состояния и его оценки, при адаптивном управлении
- 23. Графики неизвестных параметров и их оценки.
- 24. Заключение В рамках данной работы было осуществлено имитационное моделирование продольного движения самолёта и написаны соответствующие программы.
- 26. Скачать презентацию
Моделирование – осуществление имитационных экспериментов при помощи построения некоторой системы-модели, которая
Моделирование – осуществление имитационных экспериментов при помощи построения некоторой системы-модели, которая
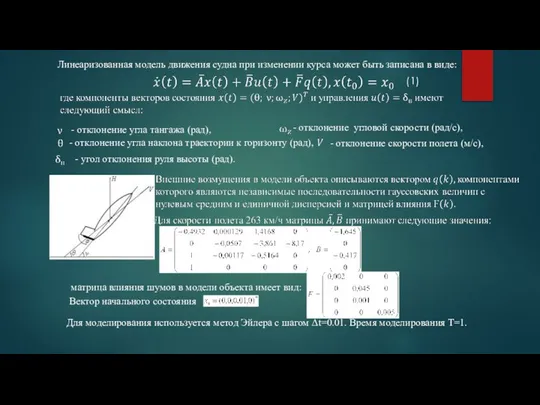
Линеаризованная модель движения судна при изменении курса может быть записана в
Линеаризованная модель движения судна при изменении курса может быть записана в
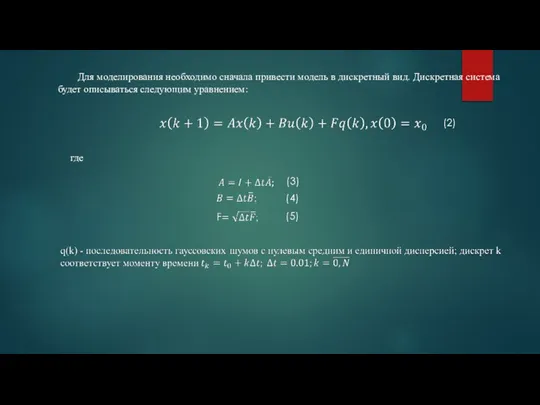
Для моделирования необходимо сначала привести модель в дискретный вид. Дискретная система
Для моделирования необходимо сначала привести модель в дискретный вид. Дискретная система
Синтез управляющих воздействий модели объекта по оценкам состояния.
Синтез управляющих воздействий при
Синтез управляющих воздействий модели объекта по оценкам состояния.
Синтез управляющих воздействий при
Синтез управляющих воздействий модели объекта по оценкам состояния.
Синтез управляющих воздействий модели объекта по оценкам состояния.
Синтез управляющего воздействия осуществляется на основе минимизации математического ожидания классического квадратичного
Синтез управляющего воздействия осуществляется на основе минимизации математического ожидания классического квадратичного
(9)
(10)
Для классического критерия оптимальности при котором для линейного управляемого объекта, математическая
(9)
(10)
Для классического критерия оптимальности при котором для линейного управляемого объекта, математическая

Результаты
График изменения угла отклонения руля
Результаты
График изменения угла отклонения руля
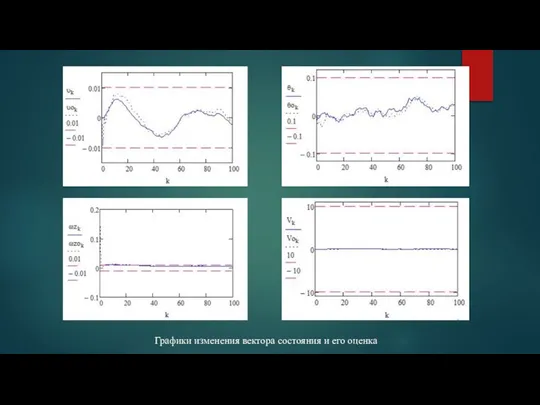
Графики изменения вектора состояния и его оценка
Графики изменения вектора состояния и его оценка
Синтез управляющих воздействий при неполном измерении.
Синтез управляющих воздействий при неполном измерении.
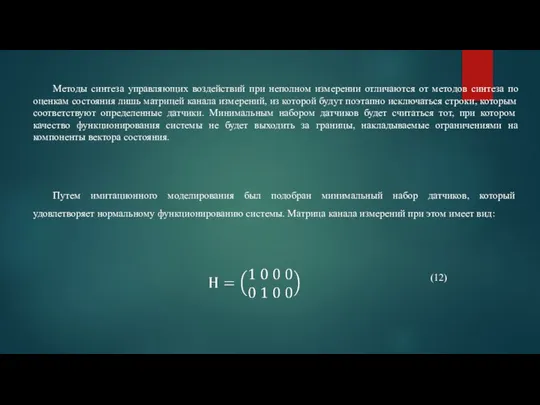
Методы синтеза управляющих воздействий при неполном измерении отличаются от методов синтеза
Методы синтеза управляющих воздействий при неполном измерении отличаются от методов синтеза
результаты
График управления при двух датчиках
результаты
График управления при двух датчиках
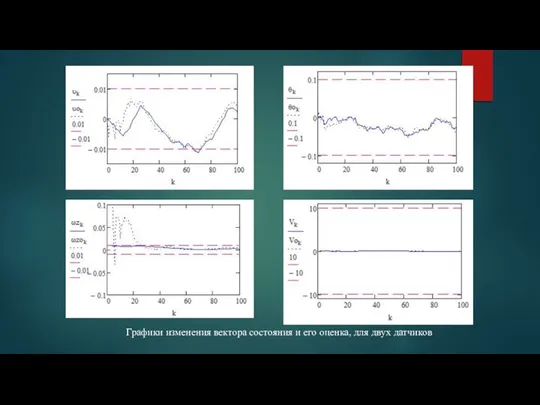
Графики изменения вектора состояния и его оценка, для двух датчиков
Графики изменения вектора состояния и его оценка, для двух датчиков
Синтез адаптивной системы управления.
Синтез адаптивной системы управления.
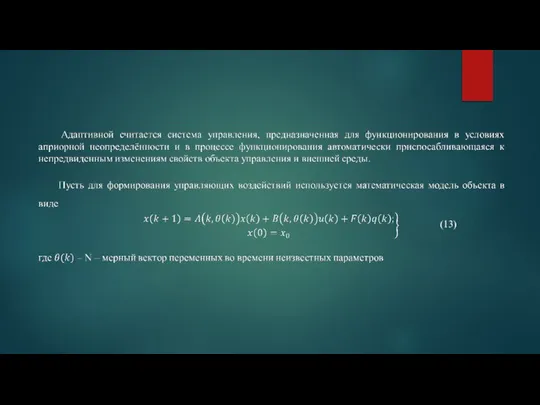
(13)
(13)
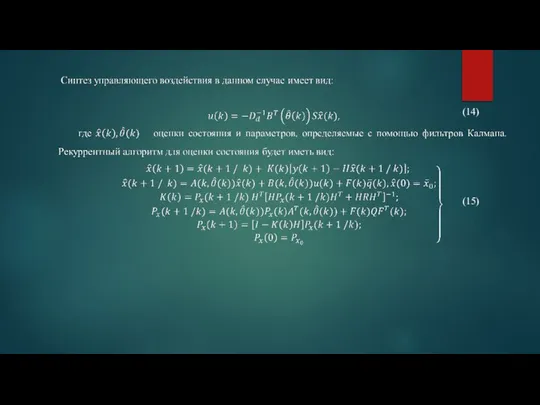
(14)
(15)
(14)
(15)
Идентификация параметров будет реализуется с помощью следящего фильтра Калмана:
(16)
Идентификация параметров будет реализуется с помощью следящего фильтра Калмана:
(16)
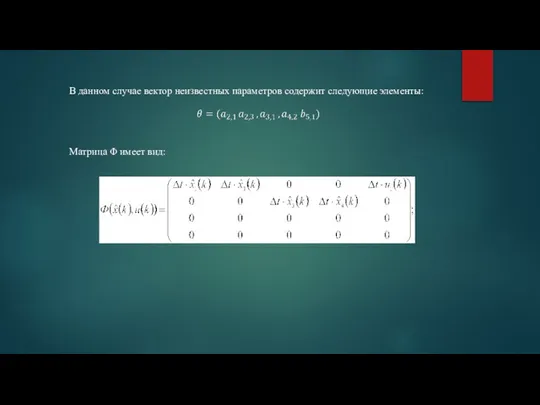
В данном случае вектор неизвестных параметров содержит следующие элементы:
Матрица Φ имеет
В данном случае вектор неизвестных параметров содержит следующие элементы:
Матрица Φ имеет

Результаты
График адаптивного управления
Результаты
График адаптивного управления
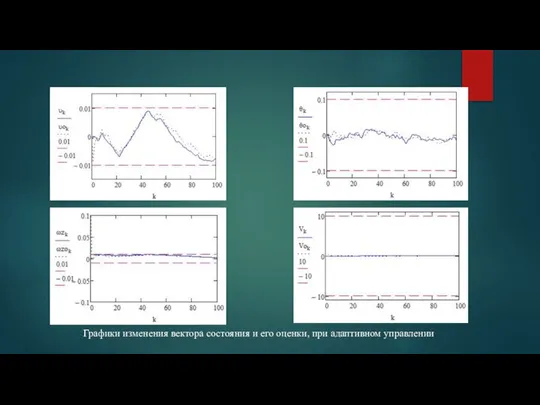
Графики изменения вектора состояния и его оценки, при адаптивном управлении
Графики изменения вектора состояния и его оценки, при адаптивном управлении
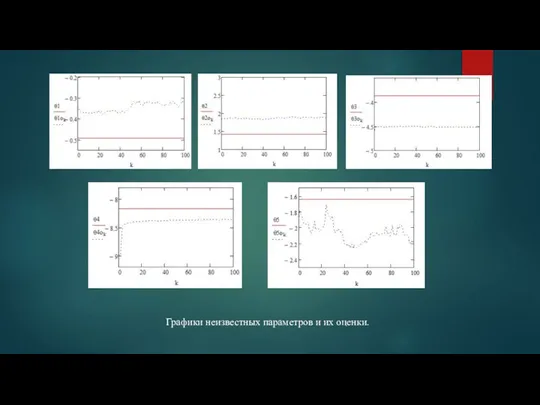
Графики неизвестных параметров и их оценки.
Графики неизвестных параметров и их оценки.
Заключение
В рамках данной работы было осуществлено имитационное моделирование продольного движения самолёта
Заключение
В рамках данной работы было осуществлено имитационное моделирование продольного движения самолёта
 Числовые последовательности. 9 класс
Числовые последовательности. 9 класс Объемы. Объем прямоугольного параллелепипеда
Объемы. Объем прямоугольного параллелепипеда Структура курсовой работы по дисциплине «Элементарная математика»
Структура курсовой работы по дисциплине «Элементарная математика» Меньше на некоторое число.
Меньше на некоторое число. Презентация по математике "Кубик рубика" - скачать
Презентация по математике "Кубик рубика" - скачать  Пересечение цилиндров
Пересечение цилиндров Автор работы: Перчикова Антонина Васильевна
Автор работы: Перчикова Антонина Васильевна  Сравнение отрезков и углов
Сравнение отрезков и углов Золотое сечение
Золотое сечение выполнила ученица 5а класса Пятакова Дарья
выполнила ученица 5а класса Пятакова Дарья Презентация по математике "Закрепление пройденного. Умножение и деление многозначных чисел" - скачать
Презентация по математике "Закрепление пройденного. Умножение и деление многозначных чисел" - скачать  Принятие решений при неполной информации. Классификация методов теории принятия решений
Принятие решений при неполной информации. Классификация методов теории принятия решений Основные понятия и аксиомы стереометрии
Основные понятия и аксиомы стереометрии Линейная алгебра. Лекция №1. Часть 1
Линейная алгебра. Лекция №1. Часть 1 Площадь круга
Площадь круга Взаимное расположение двух прямых, прямой и плоскости, двух плоскостей. (Лекция 4.1)
Взаимное расположение двух прямых, прямой и плоскости, двух плоскостей. (Лекция 4.1) Числа 1, 2, 3
Числа 1, 2, 3 Сравнение значений выражений
Сравнение значений выражений Неравенство треугольника
Неравенство треугольника Общее и различие в свойствах четырехугольников
Общее и различие в свойствах четырехугольников Теорема Пифагора
Теорема Пифагора Тестовые задания по математике для 9 класса
Тестовые задания по математике для 9 класса Взаимное расположение прямых и плоскосте в пространстве
Взаимное расположение прямых и плоскосте в пространстве Задачи городского тура олимпиады
Задачи городского тура олимпиады Математика в торговле
Математика в торговле Призма
Призма Презентация на тему Квадратный корень из степени
Презентация на тему Квадратный корень из степени  Десятичные дроби
Десятичные дроби