Особливості нелінійних систем, типові нелінійності. Особливості структурнодинамічних схем нелінійних систем
- Особливості нелінійних систем, типові нелінійності. Особливості структурнодинамічних схем нелінійних систем

Содержание
- 2. План лекції Особливості нелінійних систем пожежної автоматики. Типи нелінійностей. Типові нелінійності. Особливості побудови СДС нелінійних систем
- 3. 1. Особливості нелінійних систем пожежної автоматики. Нелінійною системою автоматичного управління (НСАУ) називається система, що описується диференціальними
- 4. 1. Особливості нелінійних систем пожежної автоматики. До таких систем не застосуємо принцип суперпозиції. Елементи таких систем
- 5. 2. Типи нелінійностей. Типові нелінійності. статичні нелінійності; динамічні нелінійності. Статичні нелінійності - це елементи, вихідний та
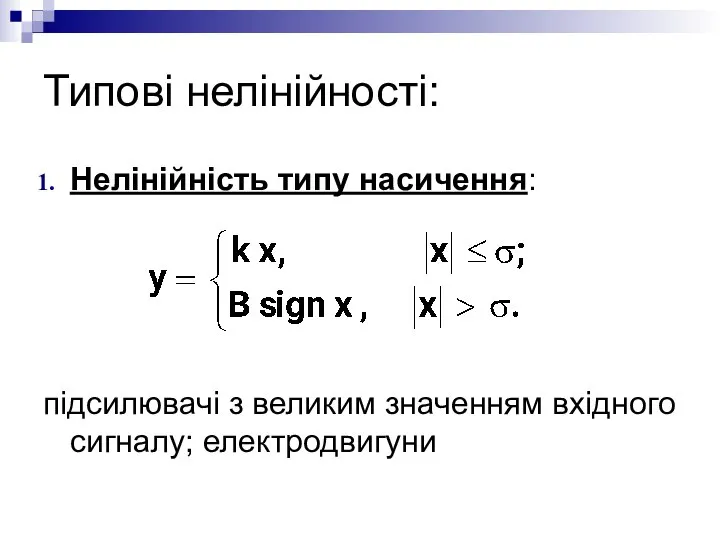
- 6. Типові нелінійності: Нелінійність типу насичення: підсилювачі з великим значенням вхідного сигналу; електродвигуни
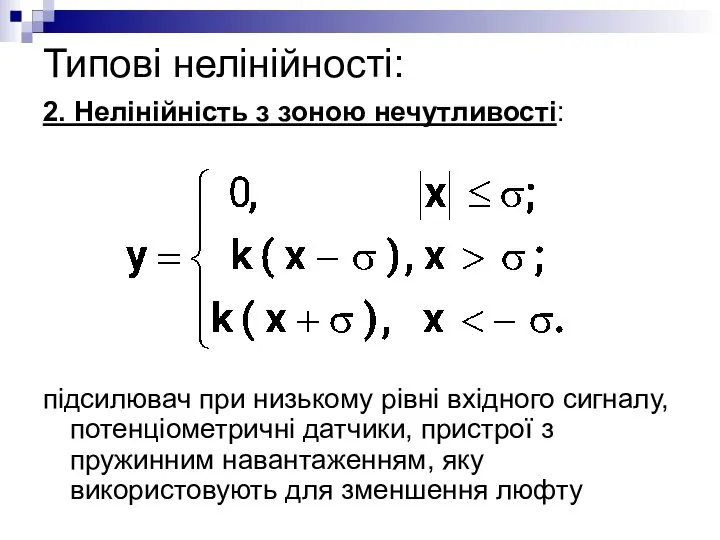
- 7. Типові нелінійності: 2. Нелінійність з зоною нечутливості: підсилювач при низькому рівні вхідного сигналу, потенціометричні датчики, пристрої
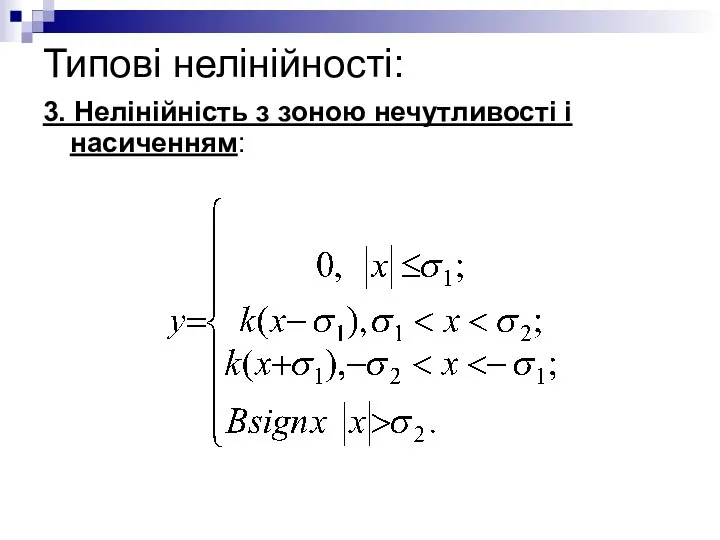
- 8. Типові нелінійності: 3. Нелінійність з зоною нечутливості і насиченням:
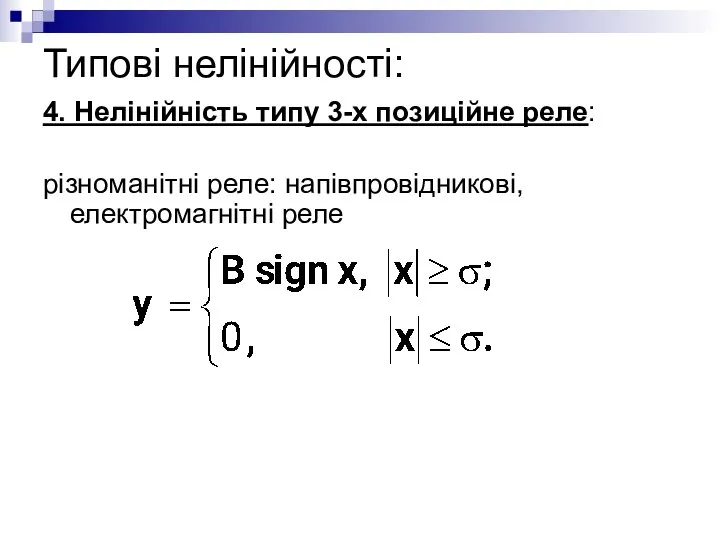
- 9. Типові нелінійності: 4. Нелінійність типу 3-х позиційне реле: різноманітні реле: напівпровідникові, електромагнітні реле
- 10. 3. ОСОБЛИВОСТІ ПОБУДОВИ СДС НЕЛІНІЙНИХ СИСТЕМ нелінійні елементи позначаються на схемі
- 11. 4. ГАРМОНІЧНА ЛІНЕАРИЗАЦІЯ НЕЛІНІЙНОСТЕЙ Суттєвість методів дослідження нелінійних систем з використанням гармонічної лінеаризації нелінійностей полягає в
- 12. 4. ГАРМОНІЧНА ЛІНЕАРИЗАЦІЯ НЕЛІНІЙНОСТЕЙ Суттєвість методів дослідження нелінійних систем з використанням гармонічної лінеаризації нелінійностей полягає в
- 13. Умови застосування методу: в системі повинні існувати автоколивання; лінійна частина нелінійної системи повинна бути фільтром низьких
- 14. Після застосування методу гармонічної лінеаризації вихідний сигнал можна представити у вигляді
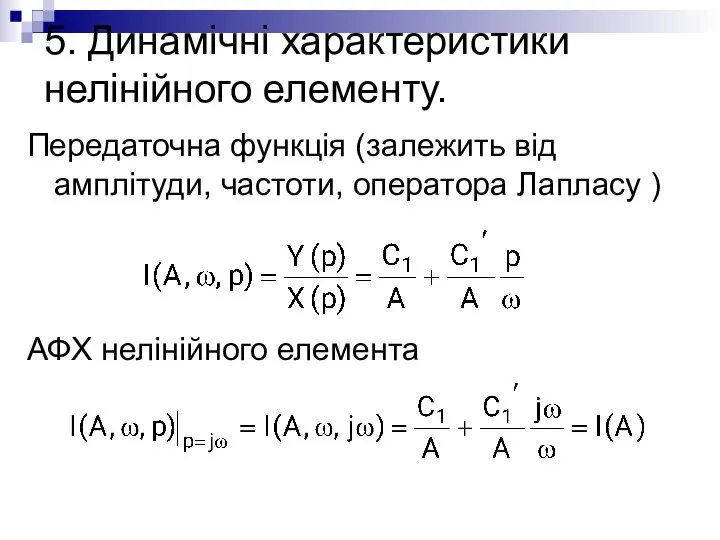
- 15. 5. Динамічні характеристики нелінійного елементу. Передаточна функція (залежить від амплітуди, частоти, оператора Лапласу ) АФХ нелінійного
- 16. 5. Динамічні характеристики нелінійного елементу. Особливостями еквівалентної ПФ НЛЕ є: 1. Вона встановлює зв'язок між зображенням
- 18. Скачать презентацию
План лекції
Особливості нелінійних систем пожежної автоматики.
Типи нелінійностей. Типові нелінійності.
Особливості побудови СДС
План лекції
Особливості нелінійних систем пожежної автоматики.
Типи нелінійностей. Типові нелінійності.
Особливості побудови СДС
1. Особливості нелінійних систем пожежної автоматики.
Нелінійною системою автоматичного управління (НСАУ) називається
1. Особливості нелінійних систем пожежної автоматики.
Нелінійною системою автоматичного управління (НСАУ) називається
1. Особливості нелінійних систем пожежної автоматики.
До таких систем не застосуємо принцип
1. Особливості нелінійних систем пожежної автоматики.
До таких систем не застосуємо принцип
2. Типи нелінійностей. Типові нелінійності.
статичні нелінійності;
динамічні нелінійності.
Статичні нелінійності - це елементи,
2. Типи нелінійностей. Типові нелінійності.
статичні нелінійності;
динамічні нелінійності.
Статичні нелінійності - це елементи,
Типові нелінійності:
Нелінійність типу насичення:
підсилювачі з великим значенням вхідного сигналу; електродвигуни
Типові нелінійності:
Нелінійність типу насичення:
підсилювачі з великим значенням вхідного сигналу; електродвигуни
Типові нелінійності:
2. Нелінійність з зоною нечутливості:
підсилювач при низькому рівні вхідного
Типові нелінійності:
2. Нелінійність з зоною нечутливості:
підсилювач при низькому рівні вхідного
Типові нелінійності:
3. Нелінійність з зоною нечутливості і насиченням:
Типові нелінійності:
3. Нелінійність з зоною нечутливості і насиченням:
Типові нелінійності:
4. Нелінійність типу 3-х позиційне реле:
різноманітні реле: напівпровідникові, електромагнітні реле
Типові нелінійності:
4. Нелінійність типу 3-х позиційне реле:
різноманітні реле: напівпровідникові, електромагнітні реле
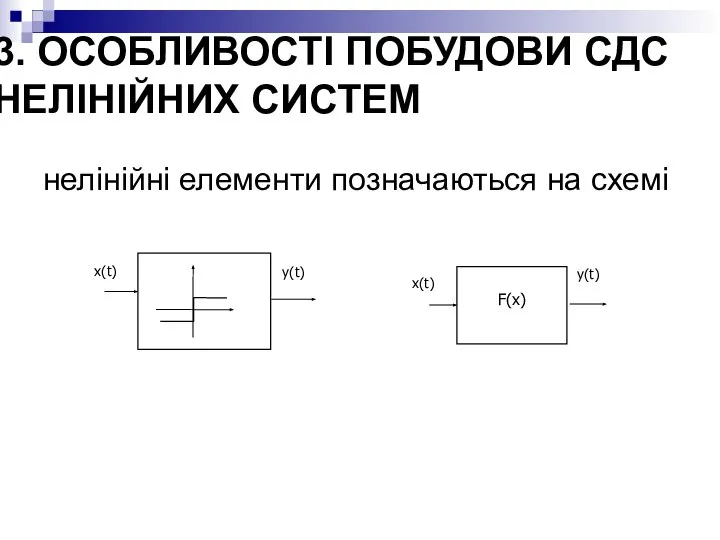
3. ОСОБЛИВОСТІ ПОБУДОВИ СДС
НЕЛІНІЙНИХ СИСТЕМ
нелінійні елементи позначаються на схемі
3. ОСОБЛИВОСТІ ПОБУДОВИ СДС
НЕЛІНІЙНИХ СИСТЕМ
нелінійні елементи позначаються на схемі
4. ГАРМОНІЧНА ЛІНЕАРИЗАЦІЯ НЕЛІНІЙНОСТЕЙ
Суттєвість методів дослідження нелінійних систем з використанням
4. ГАРМОНІЧНА ЛІНЕАРИЗАЦІЯ НЕЛІНІЙНОСТЕЙ
Суттєвість методів дослідження нелінійних систем з використанням
4. ГАРМОНІЧНА ЛІНЕАРИЗАЦІЯ НЕЛІНІЙНОСТЕЙ
Суттєвість методів дослідження нелінійних систем з використанням
4. ГАРМОНІЧНА ЛІНЕАРИЗАЦІЯ НЕЛІНІЙНОСТЕЙ
Суттєвість методів дослідження нелінійних систем з використанням
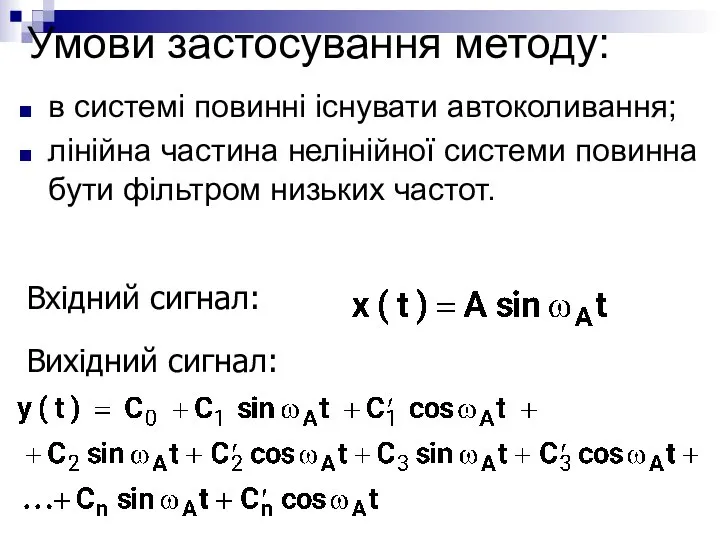
Умови застосування методу:
в системі повинні існувати автоколивання;
лінійна частина нелінійної системи повинна
Умови застосування методу:
в системі повинні існувати автоколивання;
лінійна частина нелінійної системи повинна
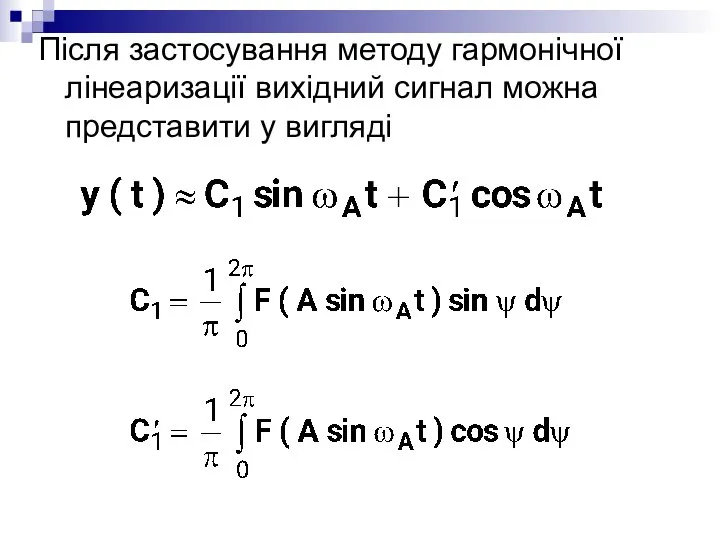
Після застосування методу гармонічної лінеаризації вихідний сигнал можна представити у вигляді
Після застосування методу гармонічної лінеаризації вихідний сигнал можна представити у вигляді
5. Динамічні характеристики нелінійного елементу.
Передаточна функція (залежить від амплітуди, частоти, оператора
5. Динамічні характеристики нелінійного елементу.
Передаточна функція (залежить від амплітуди, частоти, оператора
5. Динамічні характеристики нелінійного елементу.
Особливостями еквівалентної ПФ НЛЕ є:
1. Вона встановлює
5. Динамічні характеристики нелінійного елементу.
Особливостями еквівалентної ПФ НЛЕ є:
1. Вона встановлює
 Минимизация стоимости выполнения работ при ограничении на время их выполнения
Минимизация стоимости выполнения работ при ограничении на время их выполнения Симметрия. Центральная симметрия
Симметрия. Центральная симметрия Решение заданий с производной
Решение заданий с производной Фестиваль педагогических идей «Открытый урок» Авторы работы: Юрко Оксана Александровна, Юрко Олеся Александровна учителя ма
Фестиваль педагогических идей «Открытый урок» Авторы работы: Юрко Оксана Александровна, Юрко Олеся Александровна учителя ма Расчет статической и динамической устойчивости системы
Расчет статической и динамической устойчивости системы Параллельные прямые, их признаки и свойства
Параллельные прямые, их признаки и свойства Треугольник. Первый признак равенства треугольников
Треугольник. Первый признак равенства треугольников Квадрат. Свойства квадрата
Квадрат. Свойства квадрата Свойства функций, непрерывных на отрезке
Свойства функций, непрерывных на отрезке Аттестационная работа. Образовательная программа внеурочной деятельности Математика вокруг нас. (5 класс)
Аттестационная работа. Образовательная программа внеурочной деятельности Математика вокруг нас. (5 класс) Обучение математике в начальных школах Германии
Обучение математике в начальных школах Германии Деление многочлена на одночлен
Деление многочлена на одночлен Ранг матрицы
Ранг матрицы Обучение решению задач на движение при обобщающем повторении
Обучение решению задач на движение при обобщающем повторении Практическое применение интегралов в различных областях
Практическое применение интегралов в различных областях Интегралы Методы интегрирования. Выполнила студентка группы СО-11 Раченкова Ольга
Интегралы Методы интегрирования. Выполнила студентка группы СО-11 Раченкова Ольга 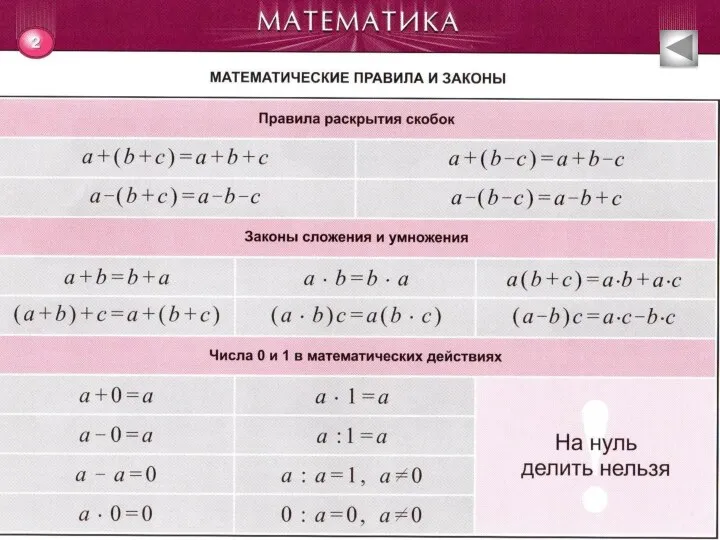 Математические правила и законы
Математические правила и законы Понятие логарифма. Урок алгебры 10 класс
Понятие логарифма. Урок алгебры 10 класс Умножение и деление натуральных чисел
Умножение и деление натуральных чисел Числа от 1 до 9. Письмо цифры 9. 1 класс
Числа от 1 до 9. Письмо цифры 9. 1 класс Длина окружности. Решение задач
Длина окружности. Решение задач Тест по теме «Окружность»
Тест по теме «Окружность» Наибольшее и наименьшее значения функции
Наибольшее и наименьшее значения функции Перевод процентов в десятичную дробь, а дробь в проценты
Перевод процентов в десятичную дробь, а дробь в проценты Свойства функции. Обобщающий урок
Свойства функции. Обобщающий урок Умножение и деление. Простые задачи
Умножение и деление. Простые задачи Как же начали считать? Сколько звезд на небе? А травинок в поле? Сколько крошек в хлебе? Сколько капель в море? На вопросы эти Не н
Как же начали считать? Сколько звезд на небе? А травинок в поле? Сколько крошек в хлебе? Сколько капель в море? На вопросы эти Не н И В ШУТКУ И ВСЕРЬЕЗ О МАТЕМАТИКЕ Бастрыкина В.В.
И В ШУТКУ И ВСЕРЬЕЗ О МАТЕМАТИКЕ Бастрыкина В.В.