- Пересечение поверхностей

Содержание
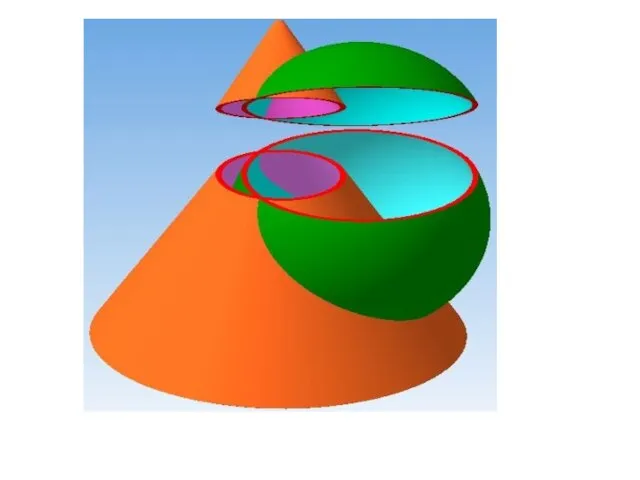
- 3. Метод секущих плоскостей
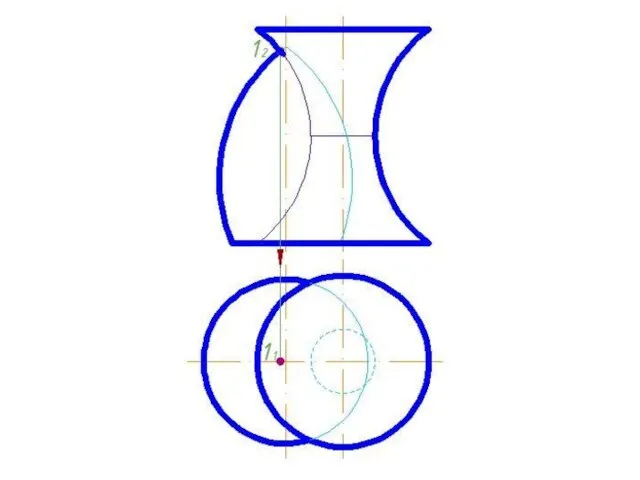
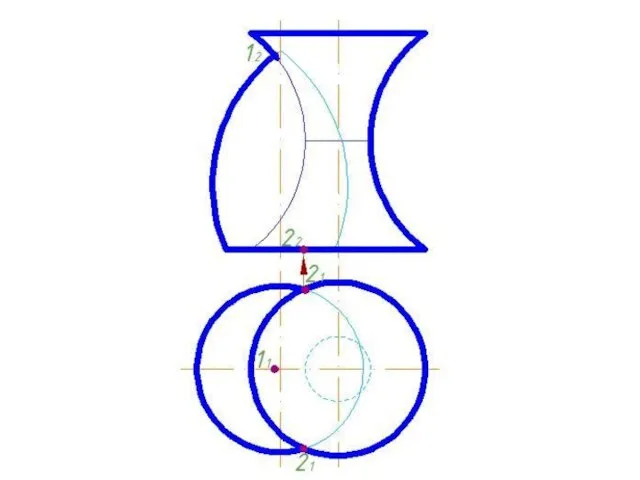
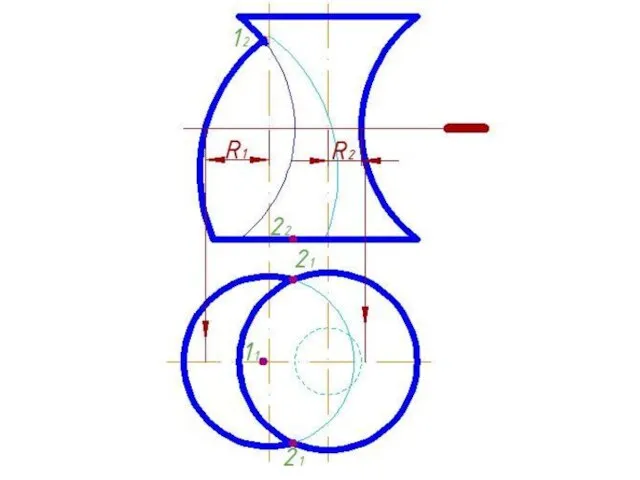
- 6. Алгоритм решения 2 ГПЗ. 1. Вводим вспомогательную секущую плоскость γ (желательно проецирующую плоскость или плоскость уровня).
- 20. Рисунок 47
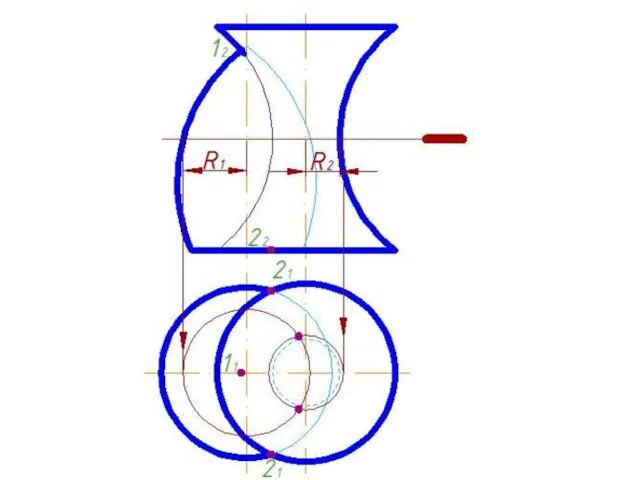
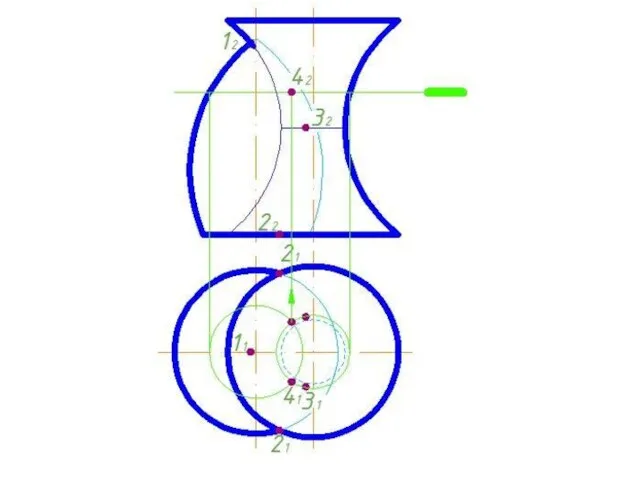
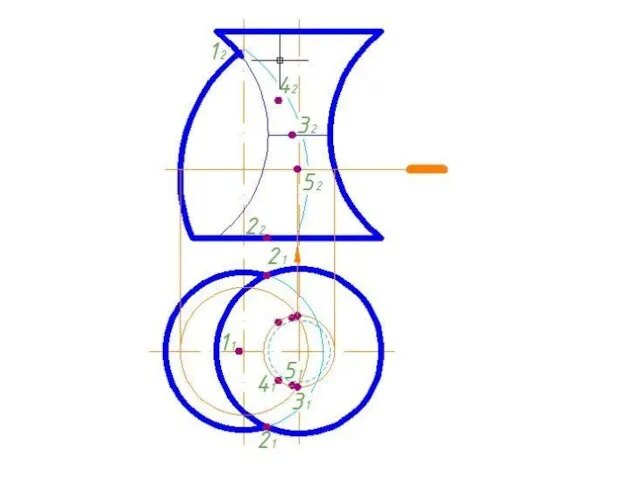
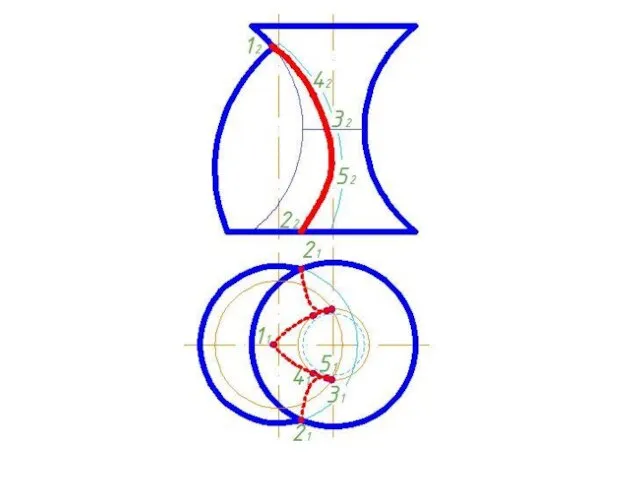
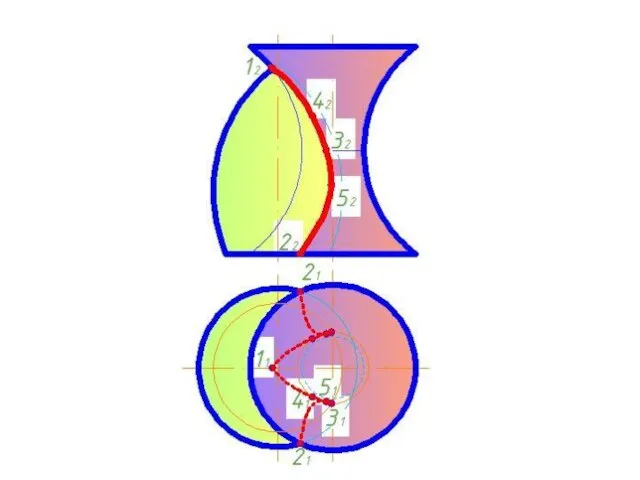
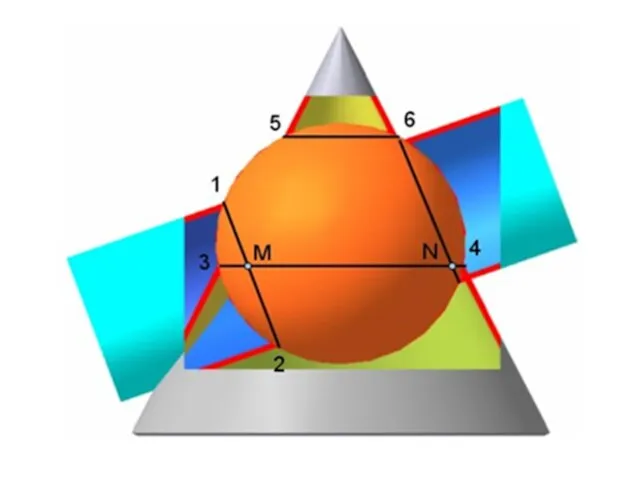
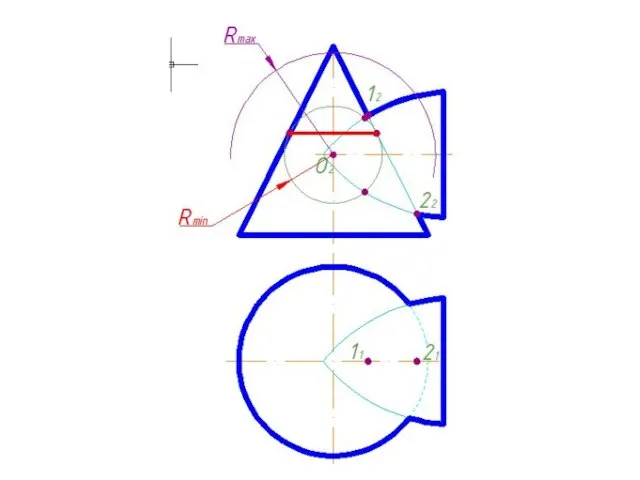
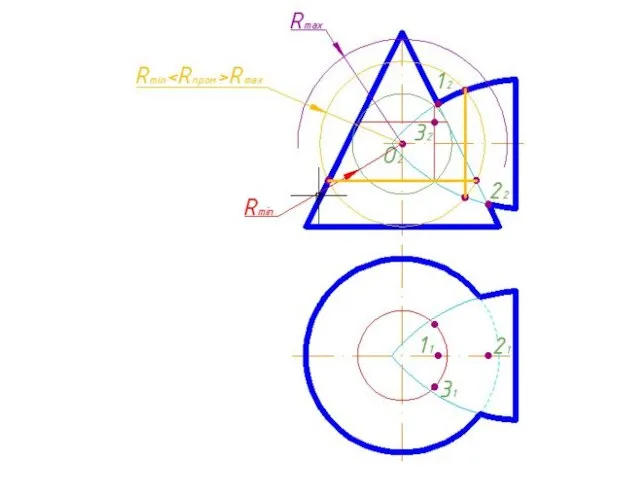
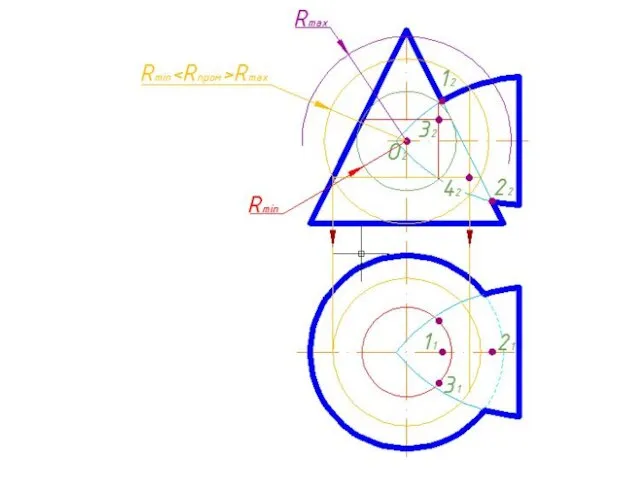
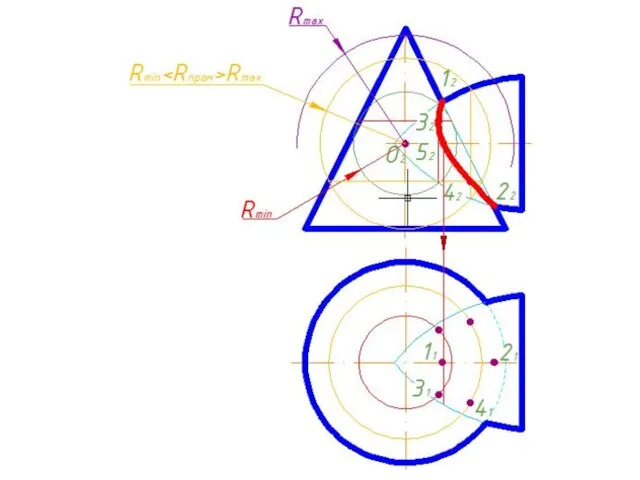
- 41. Метод вспомогательных концентрических сфер Для применения метода концентрических сфер необходимо выполнение трех условий: 1) Обе пересекающиеся
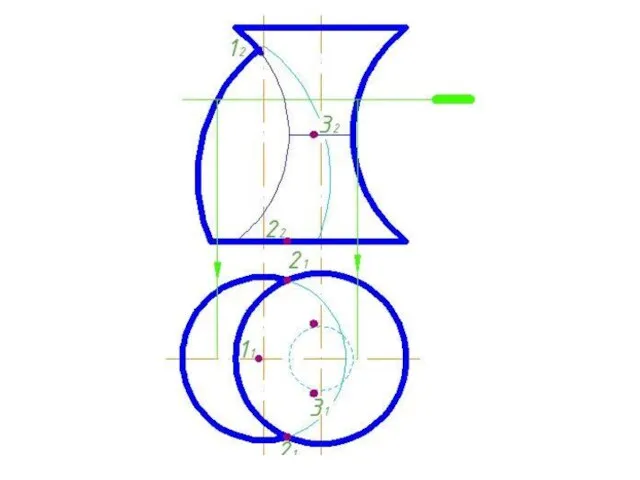
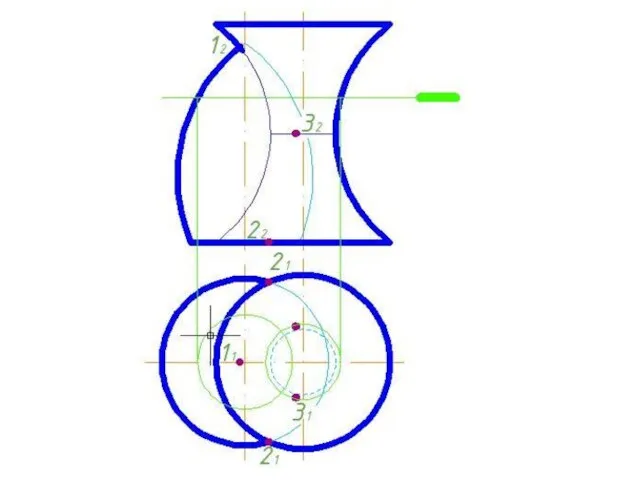
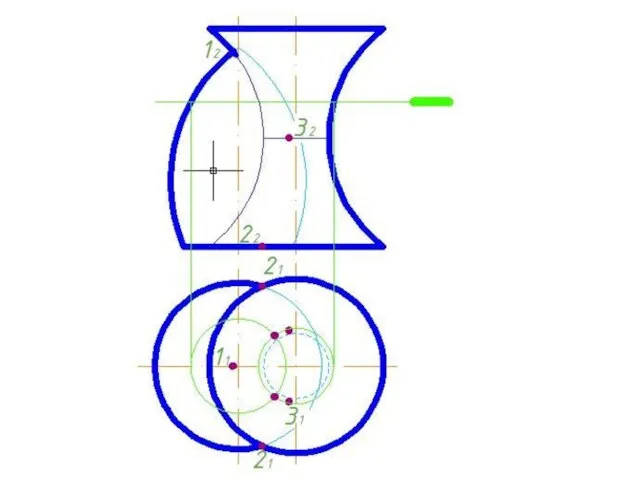
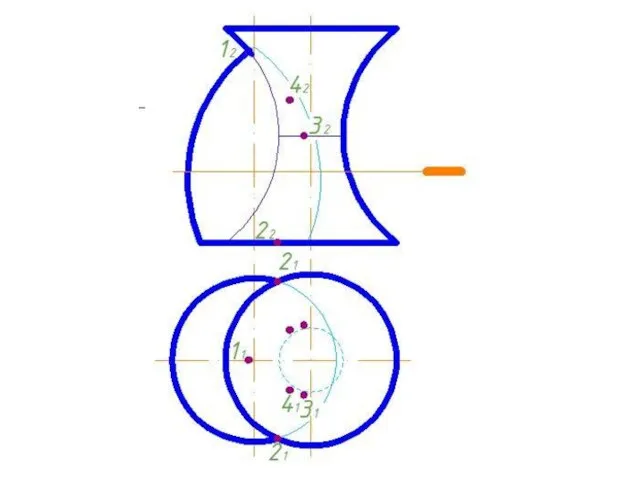
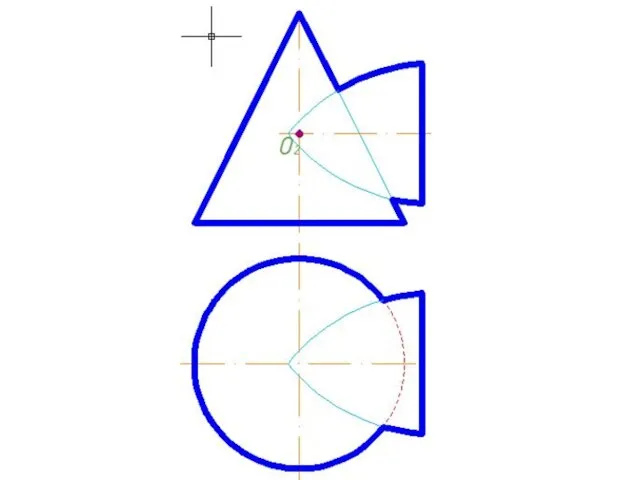
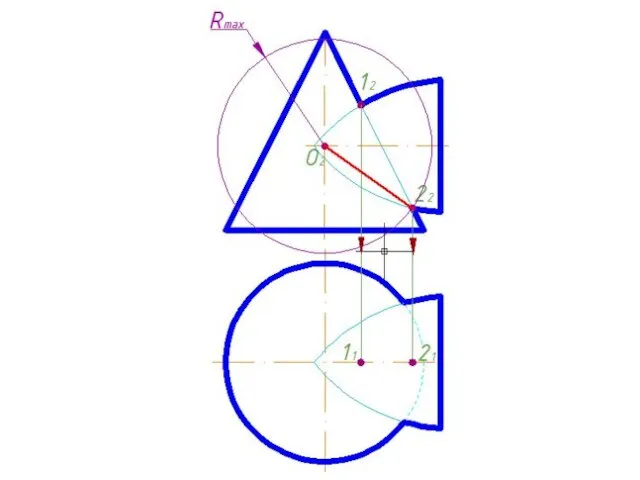
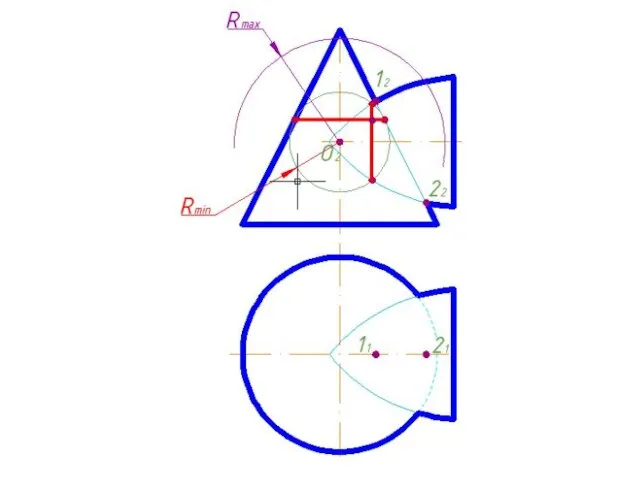
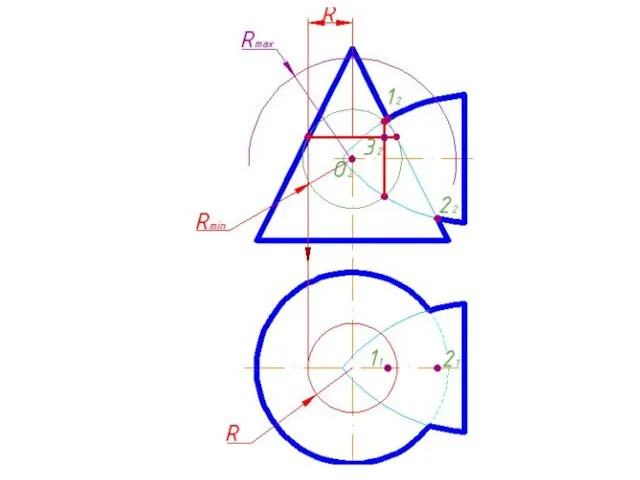
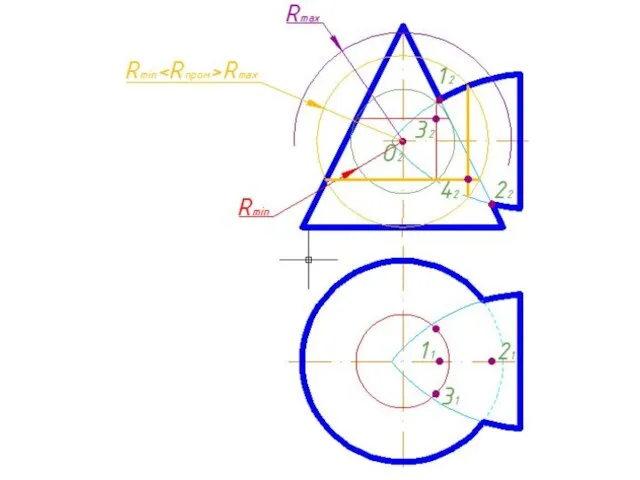
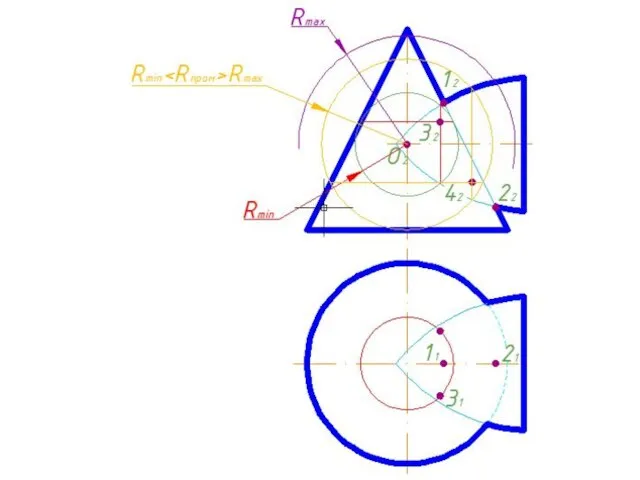
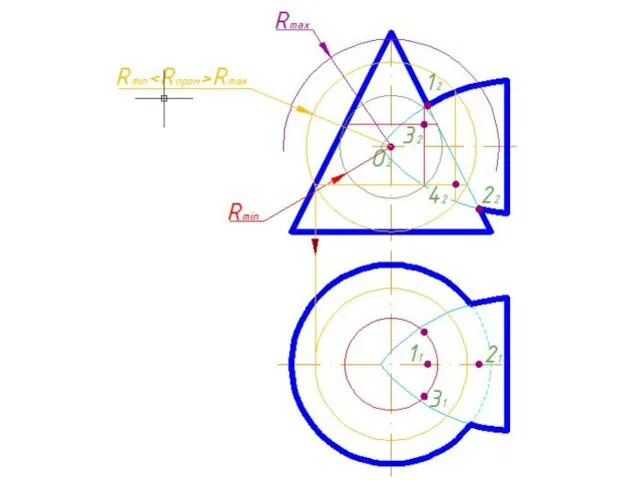
- 42. Алгоритм решения Находим центр секущих сфер – точку пересечения осей вращения заданных поверхностей. Находим радиус максимальной
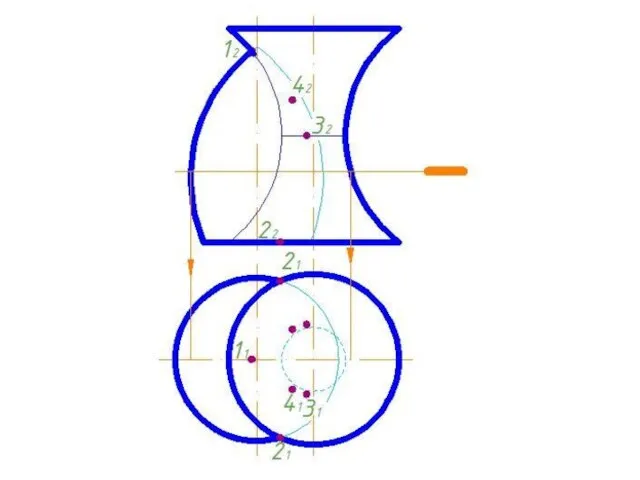
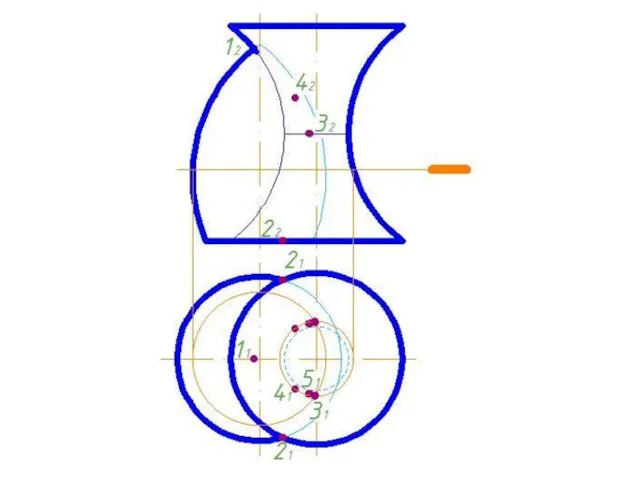
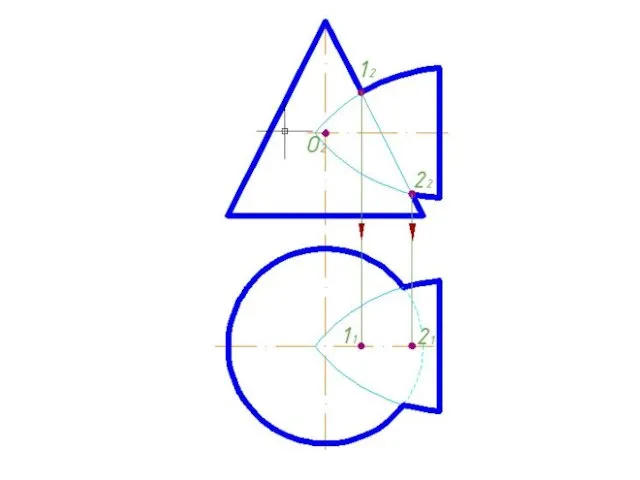
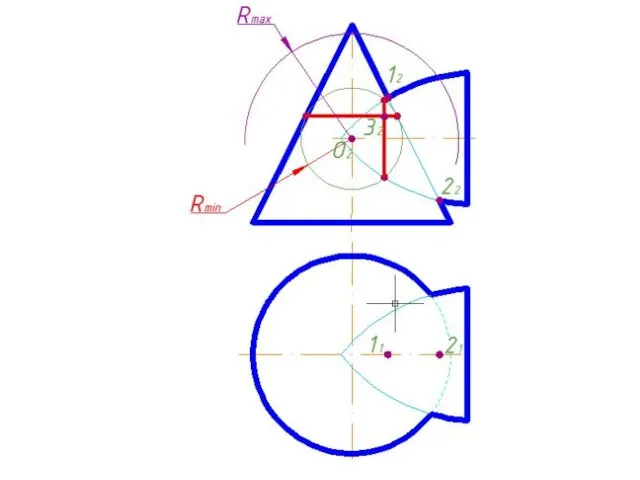
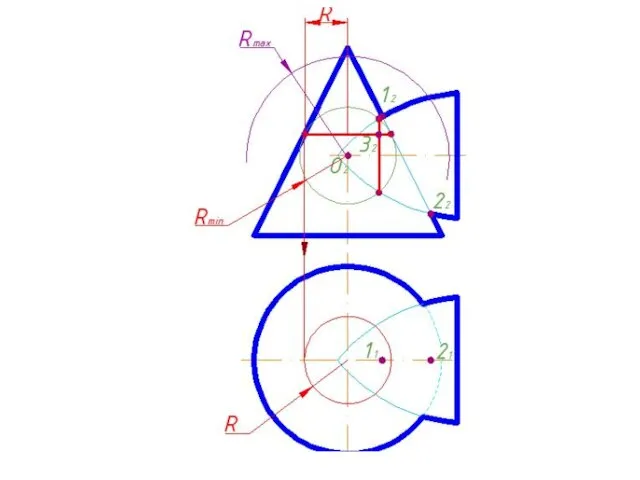
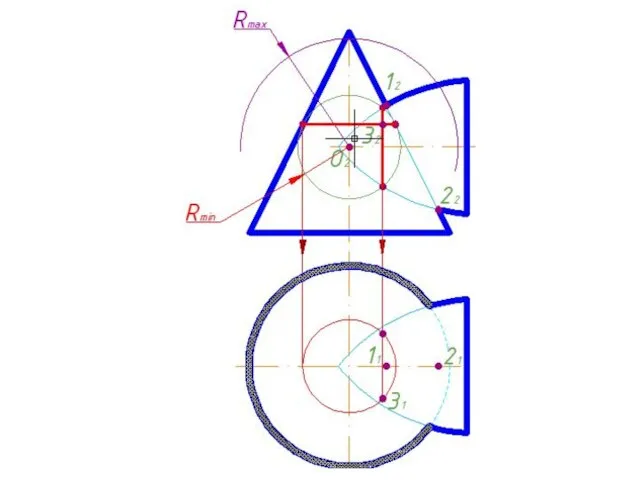
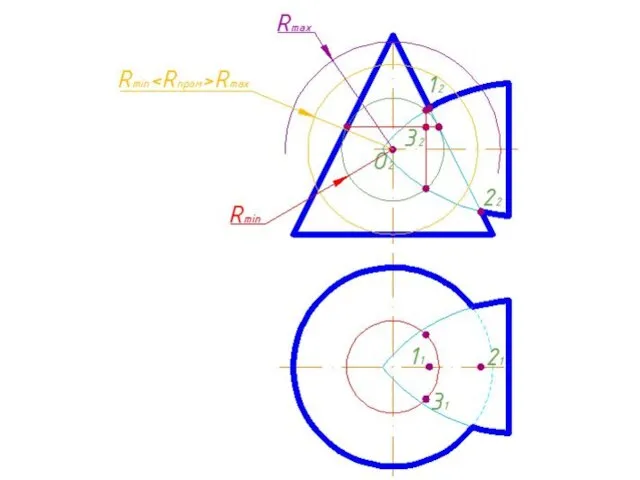
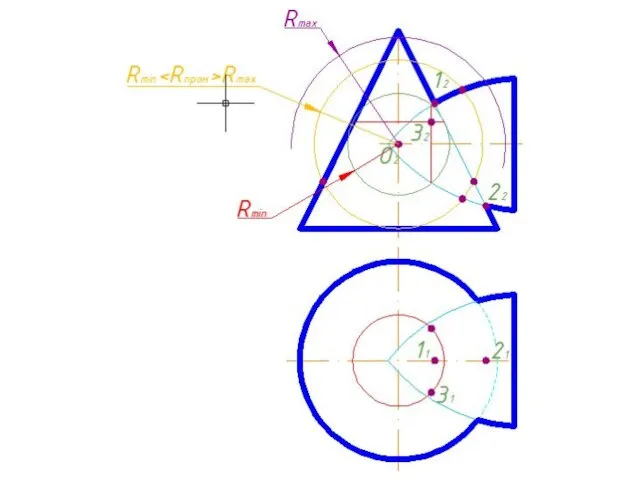
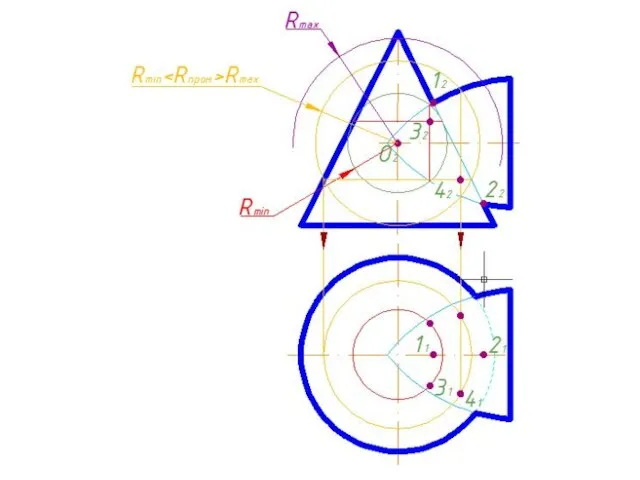
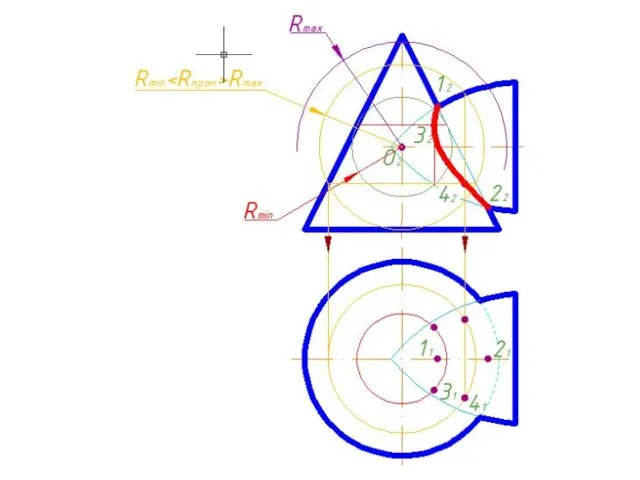
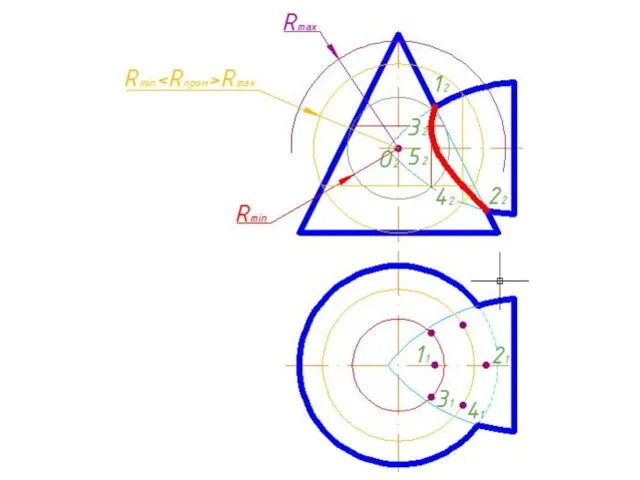
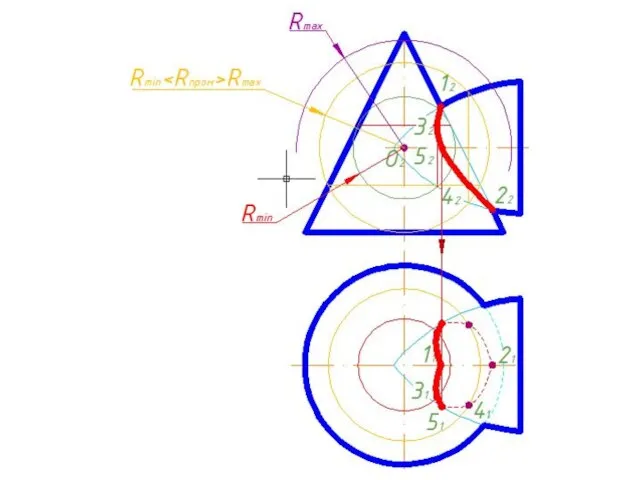
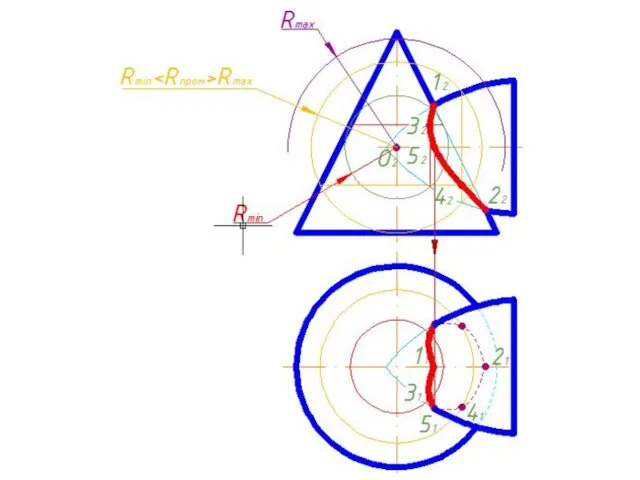
- 43. 4. Строим линии пересечения сферы Rmin с заданными поверхностями. 5. Определяем точки пресечения построенных линий. 6.
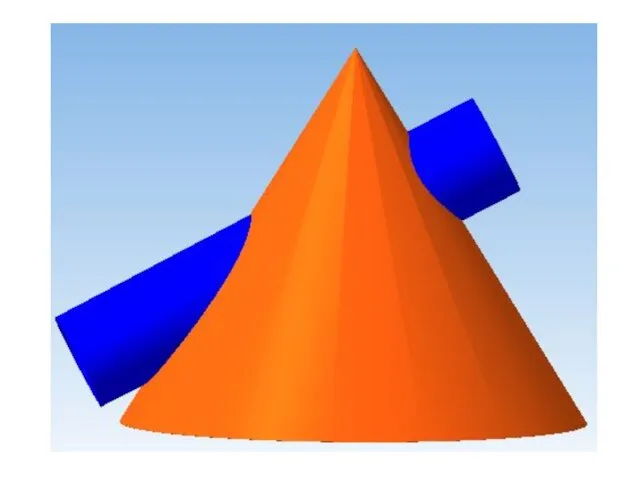
- 44. Пересечение соосных поверхностей вращения Соосные поверхности – это поверхности, имеющие общую ось вращения. Сфера, центр которой
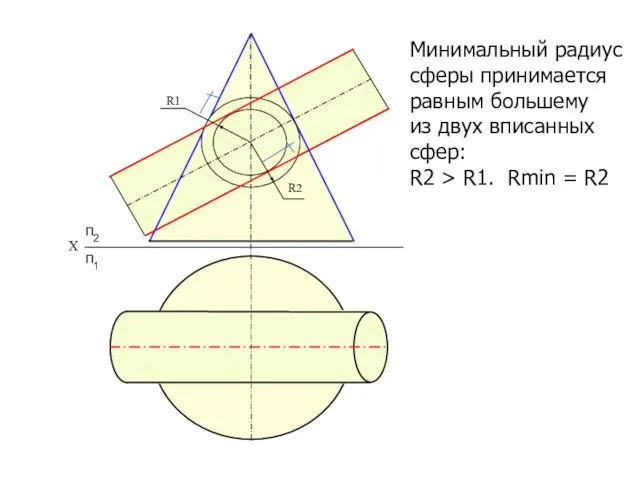
- 48. Х п2 п1 R1 R2 Минимальный радиус сферы принимается равным большему из двух вписанных сфер: R2
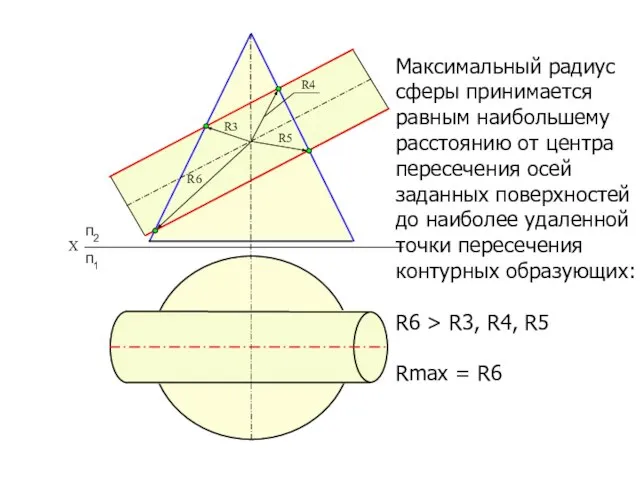
- 49. Х п2 п1 R3 R6 R4 R5 Максимальный радиус сферы принимается равным наибольшему расстоянию от центра
- 66. Рисунок 49
- 96. Скачать презентацию
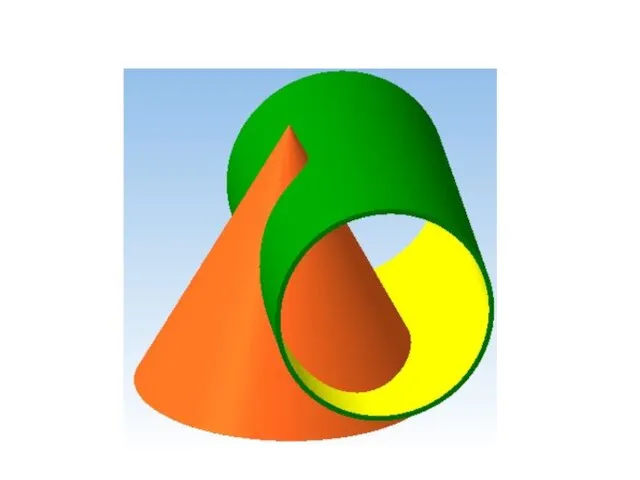

Метод секущих плоскостей
Метод секущих плоскостей
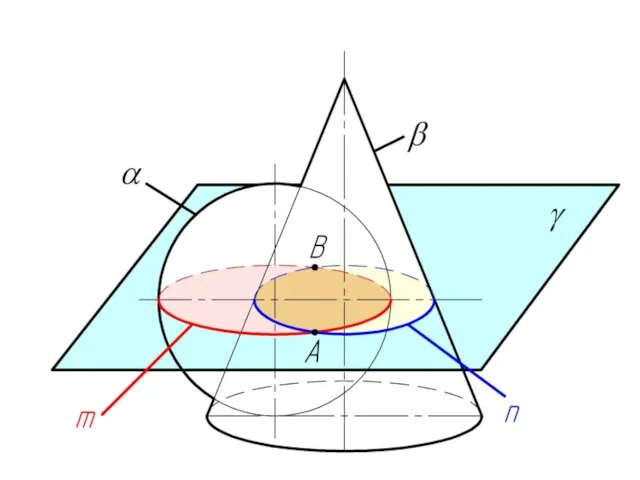
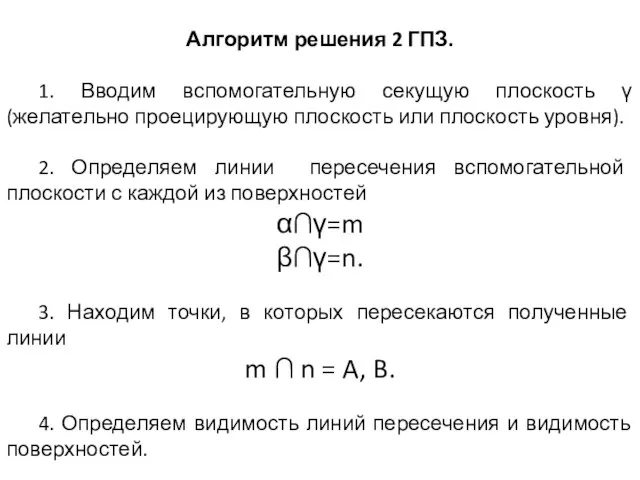
Алгоритм решения 2 ГПЗ.
1. Вводим вспомогательную секущую плоскость γ (желательно проецирующую
1. Вводим вспомогательную секущую плоскость γ (желательно проецирующую
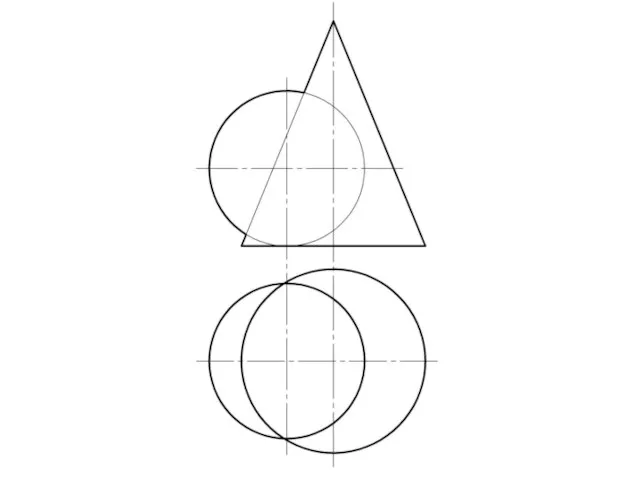
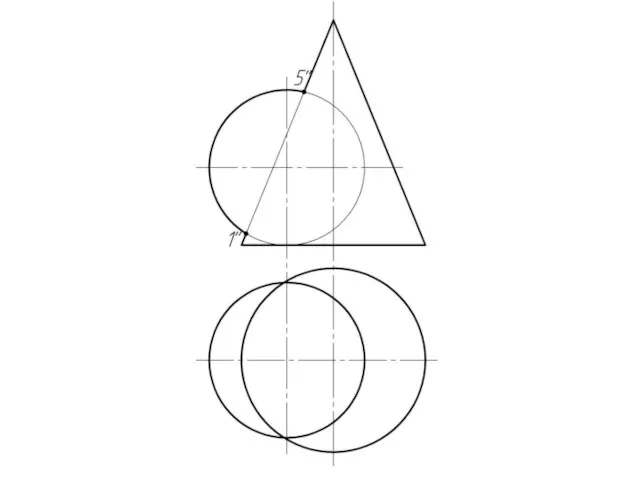
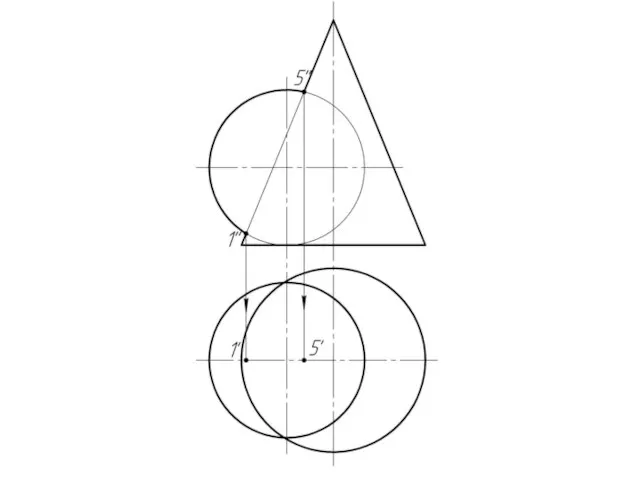
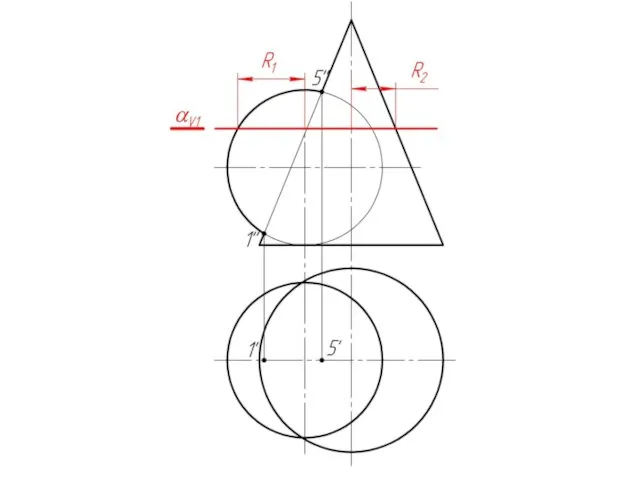
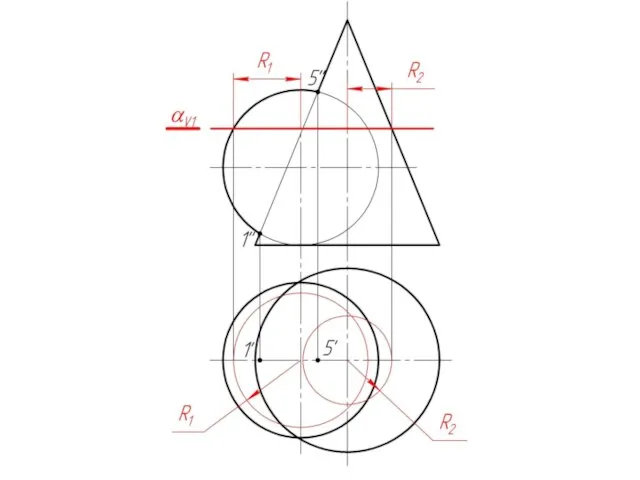
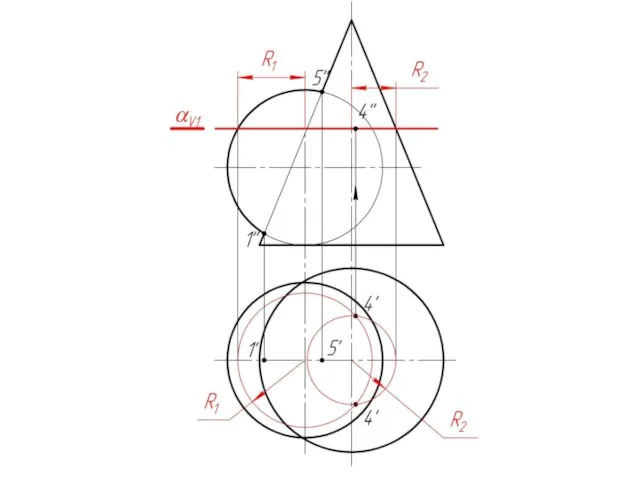
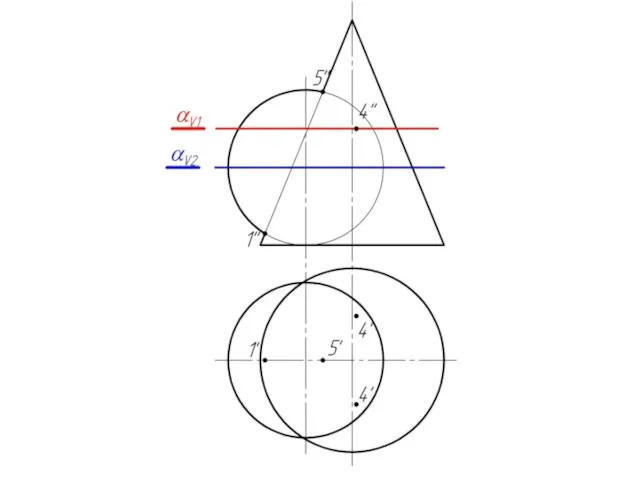
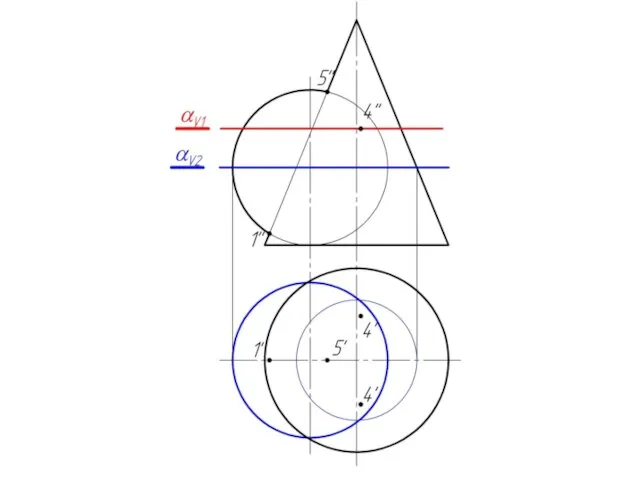
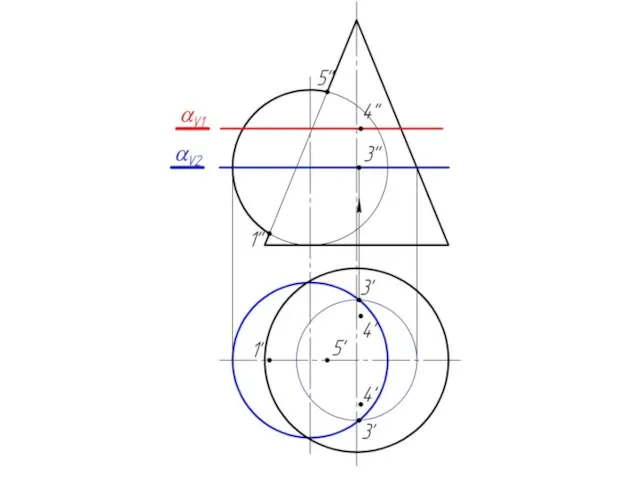
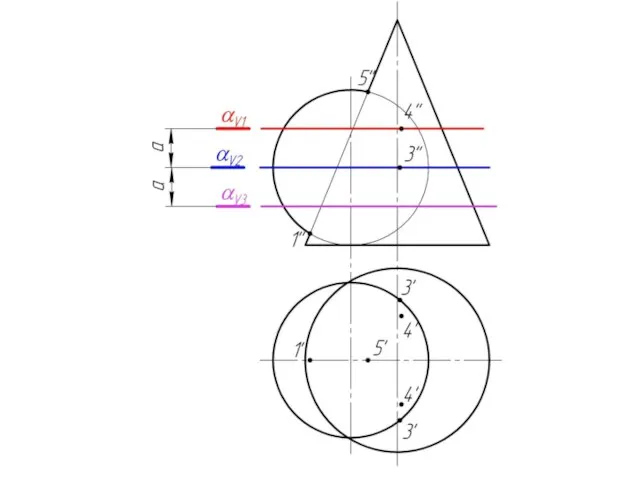

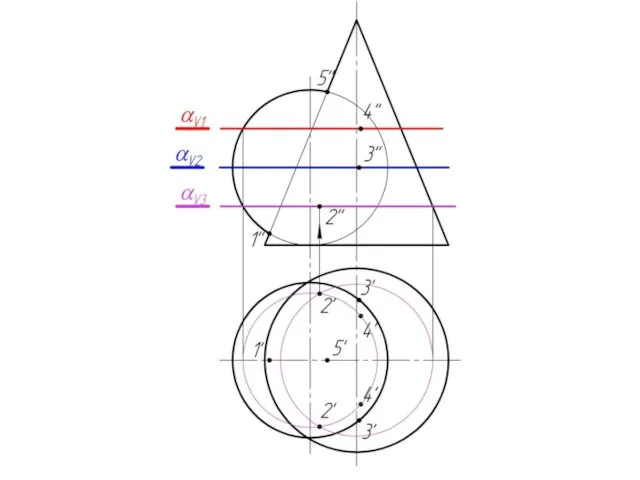
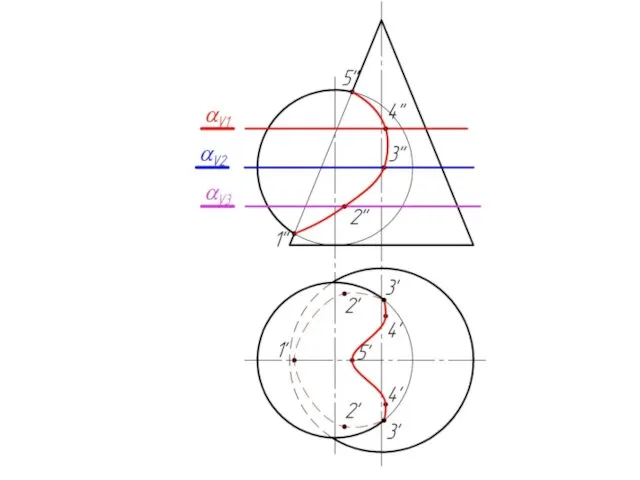
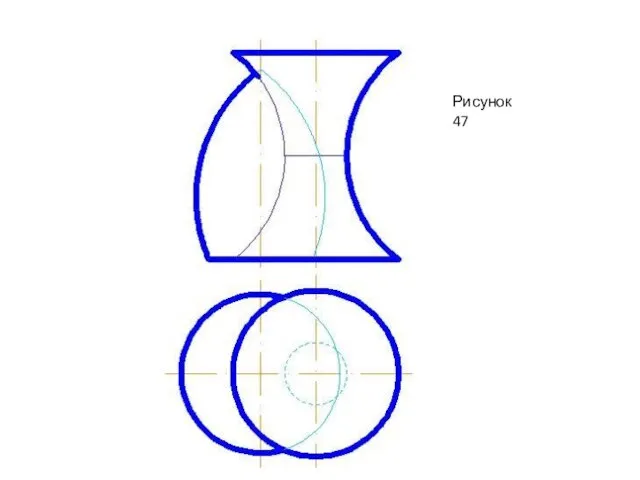
Рисунок 47
Рисунок 47






Метод вспомогательных концентрических сфер
Для применения метода концентрических сфер необходимо выполнение трех
Для применения метода концентрических сфер необходимо выполнение трех
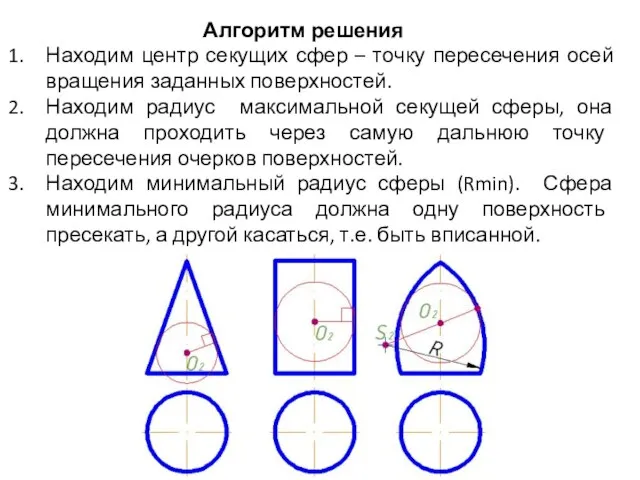
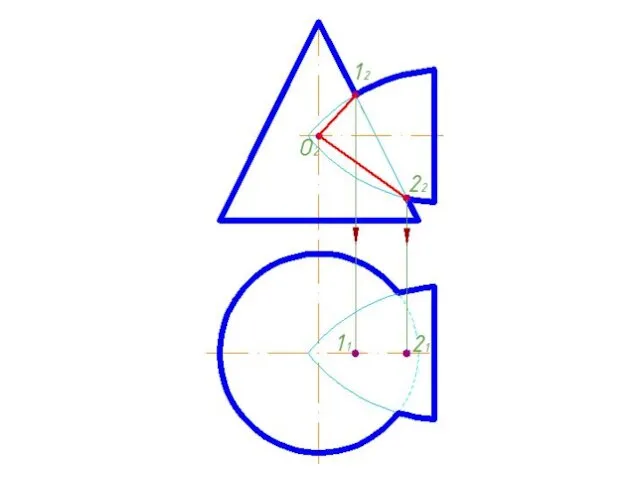
Алгоритм решения
Находим центр секущих сфер – точку пересечения осей вращения заданных
Алгоритм решения
Находим центр секущих сфер – точку пересечения осей вращения заданных
4. Строим линии пересечения сферы Rmin с заданными
поверхностями.
5. Определяем
4. Строим линии пересечения сферы Rmin с заданными
поверхностями.
5. Определяем
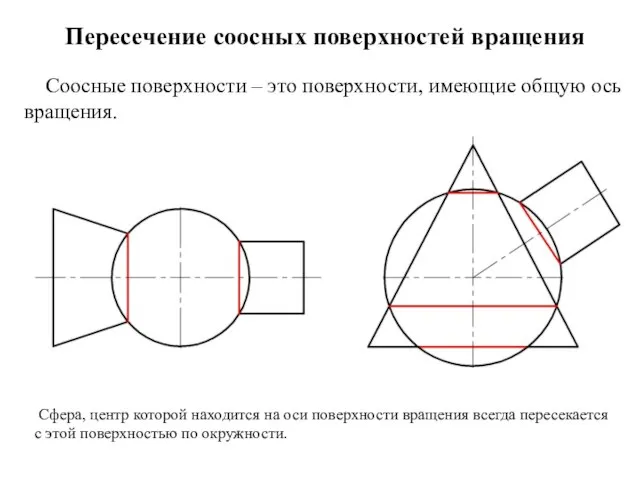
Пересечение соосных поверхностей вращения
Соосные поверхности – это поверхности, имеющие общую
Пересечение соосных поверхностей вращения
Соосные поверхности – это поверхности, имеющие общую

Х
п2
п1
R1
R2
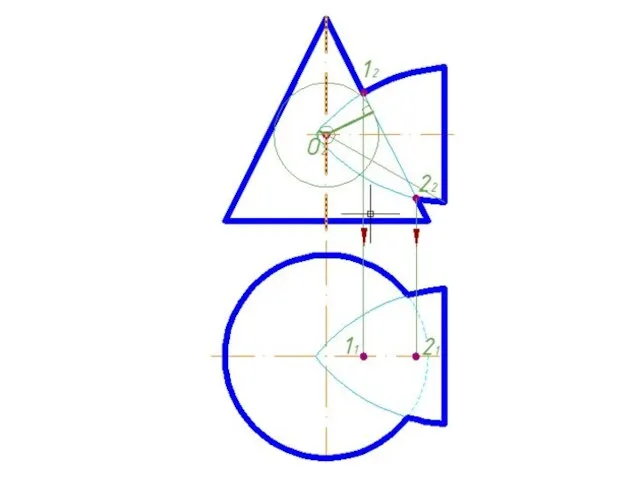
Минимальный радиус
сферы принимается
равным большему
из двух вписанных сфер:
R2 > R1. Rmin
Х
п2
п1
R1
R2
Минимальный радиус
сферы принимается
равным большему
из двух вписанных сфер:
R2 > R1. Rmin
Х
п2
п1
R3
R6
R4
R5
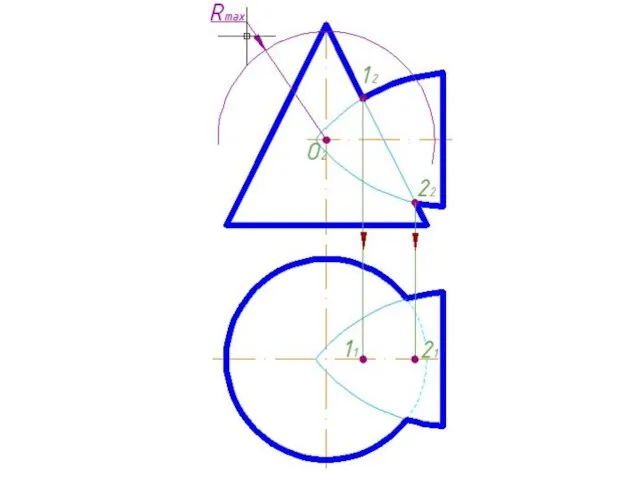
Максимальный радиус
сферы принимается
равным наибольшему
расстоянию от центра
пересечения осей
заданных поверхностей
до
Х
п2
п1
R3
R6
R4
R5
Максимальный радиус
сферы принимается
равным наибольшему
расстоянию от центра
пересечения осей
заданных поверхностей
до
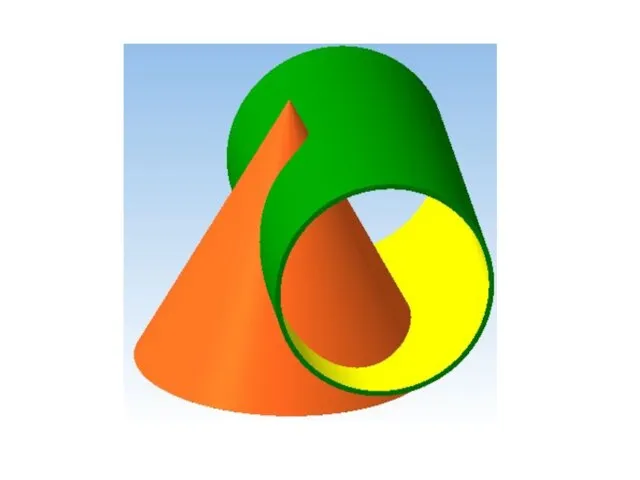

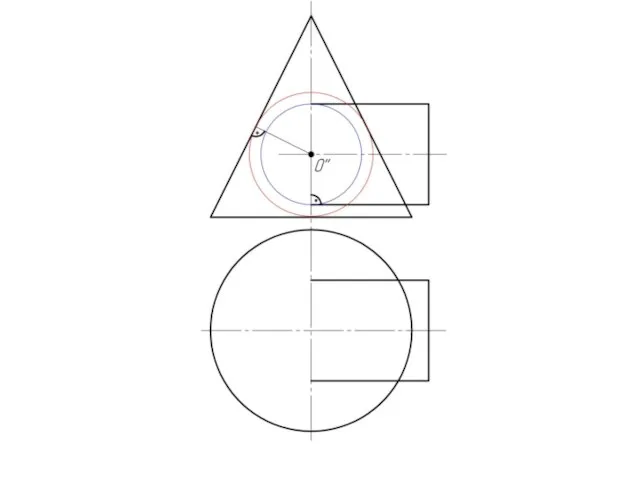
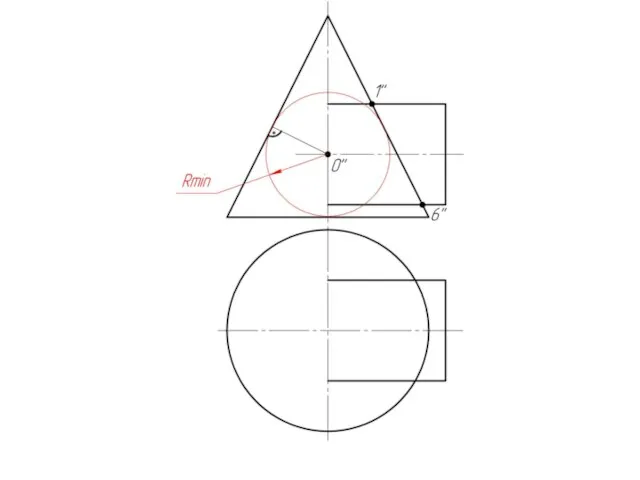
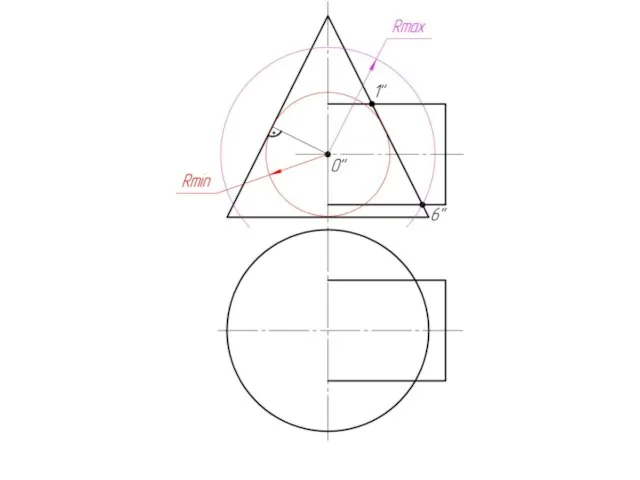
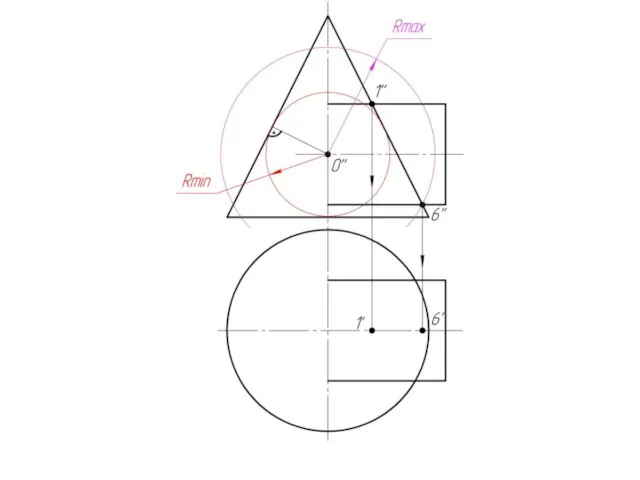
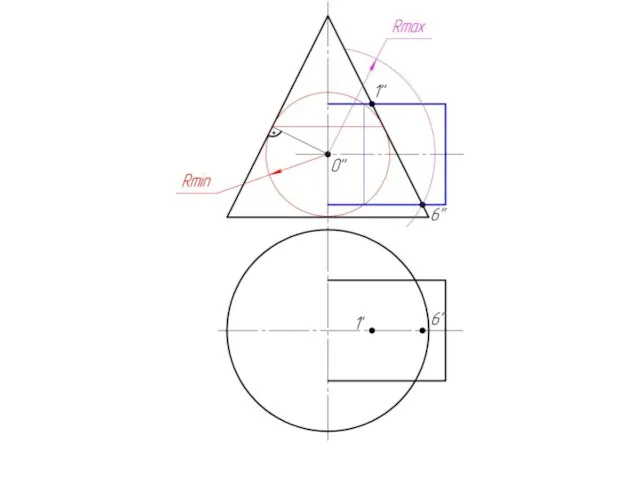
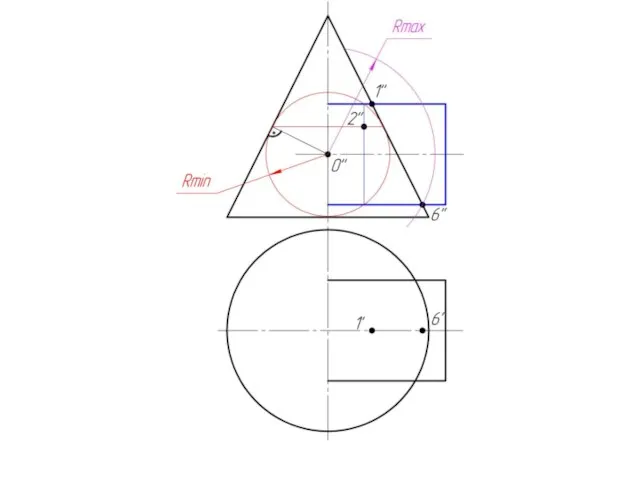
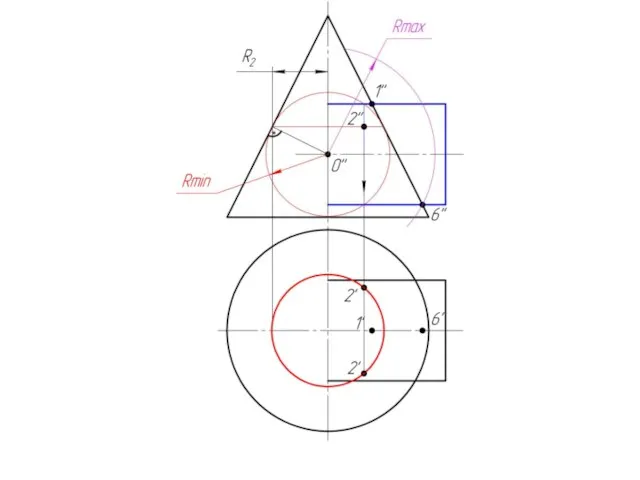
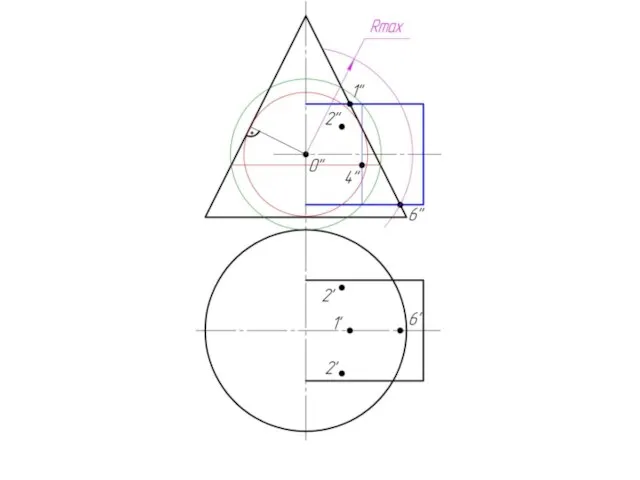

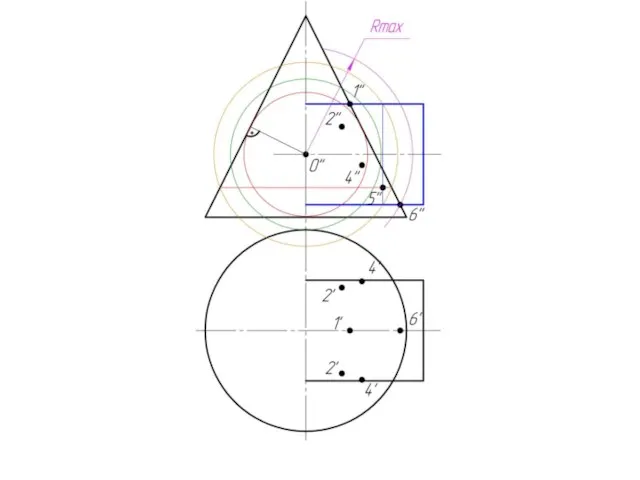
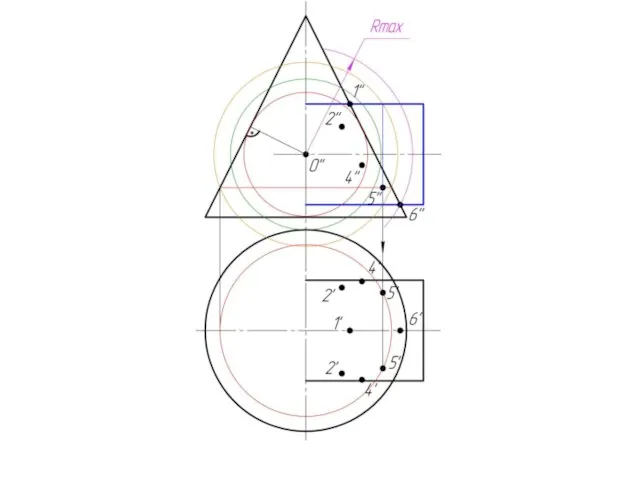
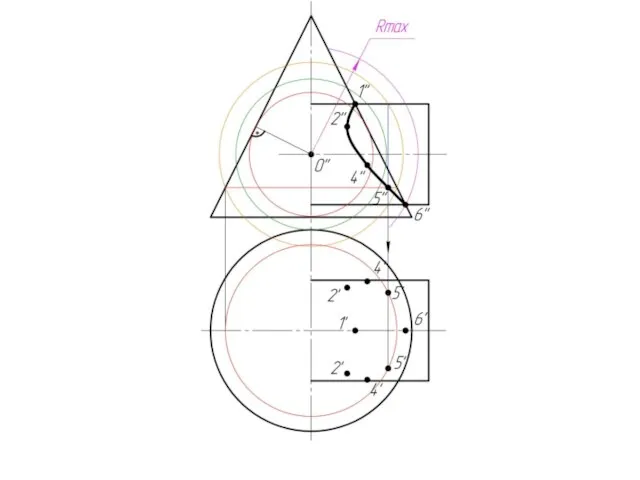
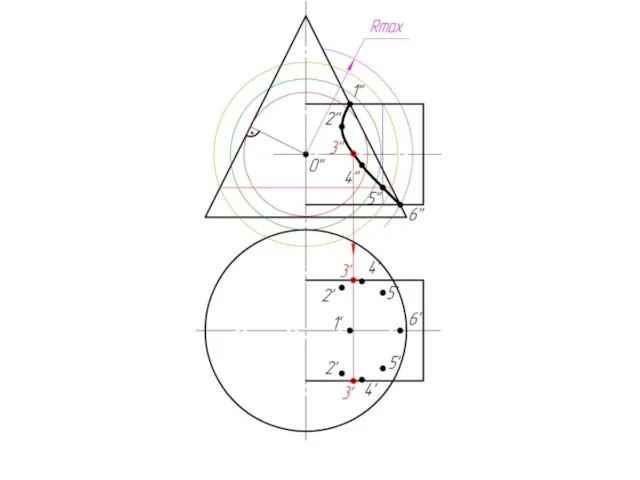
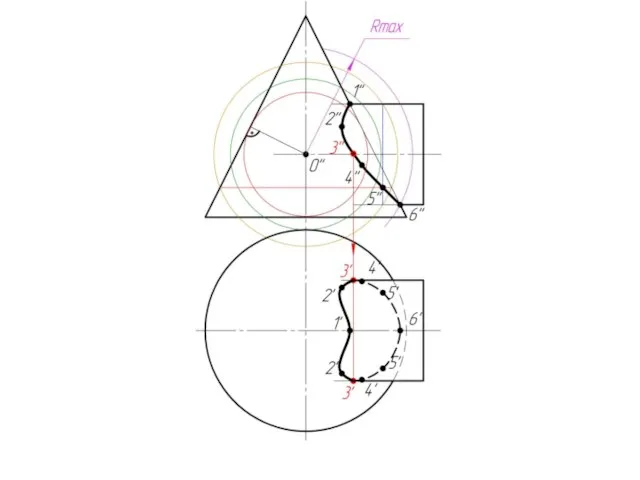
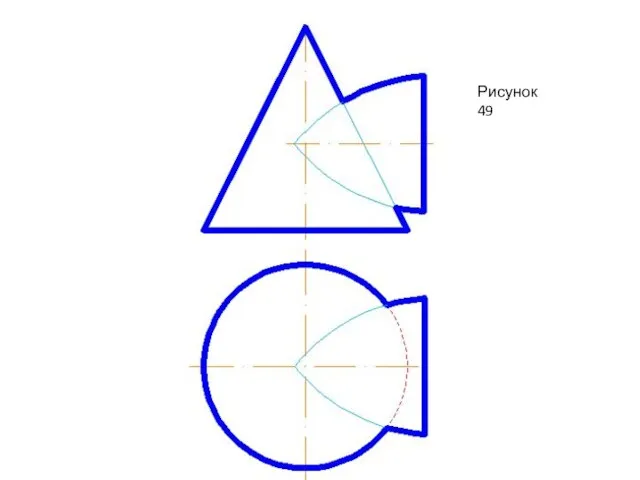
Рисунок 49
Рисунок 49



 Особенности решения различных типов задач. Задачи краеведческого, исторического содержания
Особенности решения различных типов задач. Задачи краеведческого, исторического содержания Алгоритмы с возвратом. (Лекция 9)
Алгоритмы с возвратом. (Лекция 9) Математика « Гармония»2 класс Соотношение единиц длины. _
Математика « Гармония»2 класс Соотношение единиц длины. _ Таблица сложения и вычитания с числом 4
Таблица сложения и вычитания с числом 4 Распределительное свойства умножения
Распределительное свойства умножения Cредняя линия треугольника, средняя линия трапеции
Cредняя линия треугольника, средняя линия трапеции Элементы статистики. Количество звонков в день за ноябрь
Элементы статистики. Количество звонков в день за ноябрь Смежные углы. Задачи
Смежные углы. Задачи Решение задач по аксиомам стереометрии
Решение задач по аксиомам стереометрии Быстрый счет. Табличное сложение чисел от 11 до 20
Быстрый счет. Табличное сложение чисел от 11 до 20 Определенный интеграл
Определенный интеграл Равнобедренный треугольник и его свойства
Равнобедренный треугольник и его свойства Третий признак равенства треугольников по трем сторонам
Третий признак равенства треугольников по трем сторонам Проект «Колодец». Деловая игра по теме «Цилиндр»
Проект «Колодец». Деловая игра по теме «Цилиндр» Презентация на тему Тригонометрия
Презентация на тему Тригонометрия  Свойства степени с натуральным показателем
Свойства степени с натуральным показателем Геометрические фигуры в пространстве
Геометрические фигуры в пространстве Проектная деятельность в школе как показатель сформированности познавательных УУД
Проектная деятельность в школе как показатель сформированности познавательных УУД Раскрытие скобок
Раскрытие скобок Квадратные уравнения ах2 + вх + с = 0
Квадратные уравнения ах2 + вх + с = 0 Параллельность прямой и плоскости
Параллельность прямой и плоскости Четыре замечательные точки треугольника
Четыре замечательные точки треугольника Пересечение поверхности и плоскости. Сечение поверхностей 2-го порядка
Пересечение поверхности и плоскости. Сечение поверхностей 2-го порядка Сумма углов треугольника. Виды треугольников
Сумма углов треугольника. Виды треугольников Задачи на движение
Задачи на движение Моделирование при управлении рисками авиапредприятий
Моделирование при управлении рисками авиапредприятий Избранные вопросы и задачи планиметрии. Пособие для факультативных занятий
Избранные вопросы и задачи планиметрии. Пособие для факультативных занятий Своя игра. Степень с натуральным показателем
Своя игра. Степень с натуральным показателем