- Получение передаточной функции методом пространства состояний

Содержание
- 2. Цель работы: Изучить основные типы динамических звеньев САУ, ознакомиться на практике с теорией пространства состояний, с
- 3. Пример
- 4. Шаг 1. Подписать все типовые динамические звенья интегрирующее звено интегрирующее звено дифференцирующее звено усилительное звено апериодическое
- 5. Шаг 2. Привести схему к виду с выделением чистых интеграторов интегрирующее звено дифферен- цирующее звено апериодическое
- 6. Шаг 3. Выбор базиса пространства состояний
- 7. Шаг 4. Описание входов интеграторов
- 8. Шаг 5. Составление матриц пространства состояний Шаг 6. Подставить в матрицы значения числовых коэффициентов (по вариантам
- 10. Скачать презентацию
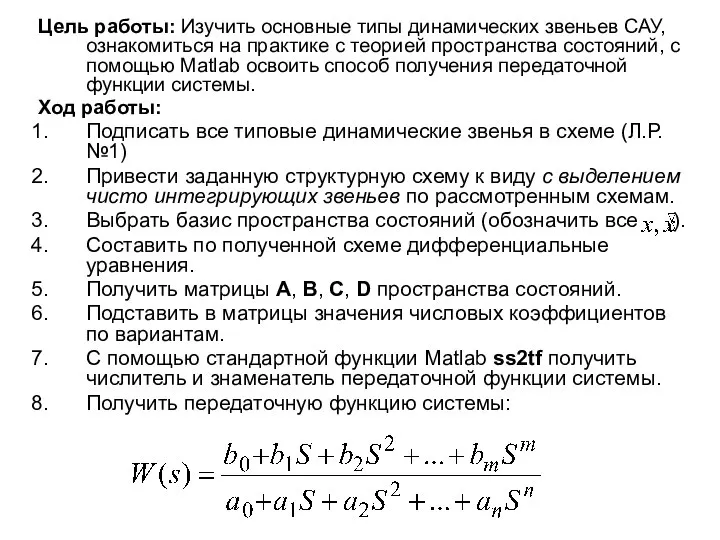
Цель работы: Изучить основные типы динамических звеньев САУ, ознакомиться на практике
Цель работы: Изучить основные типы динамических звеньев САУ, ознакомиться на практике
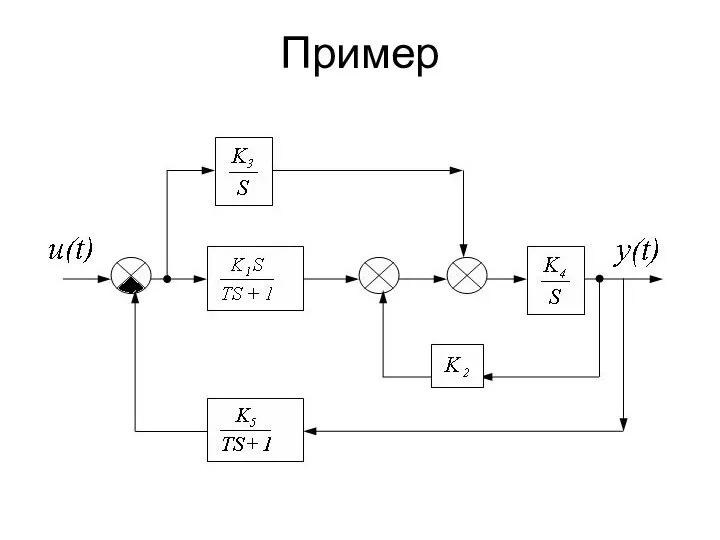
Пример
Пример
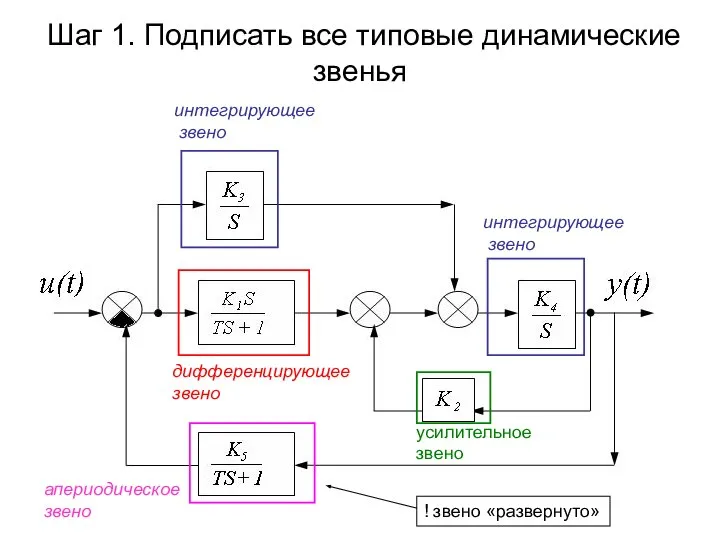
Шаг 1. Подписать все типовые динамические звенья
интегрирующее
звено
интегрирующее
звено
дифференцирующее
звено
усилительное
звено
апериодическое
звено
! звено «развернуто»
Шаг 1. Подписать все типовые динамические звенья
интегрирующее
звено
интегрирующее
звено
дифференцирующее
звено
усилительное
звено
апериодическое
звено
! звено «развернуто»
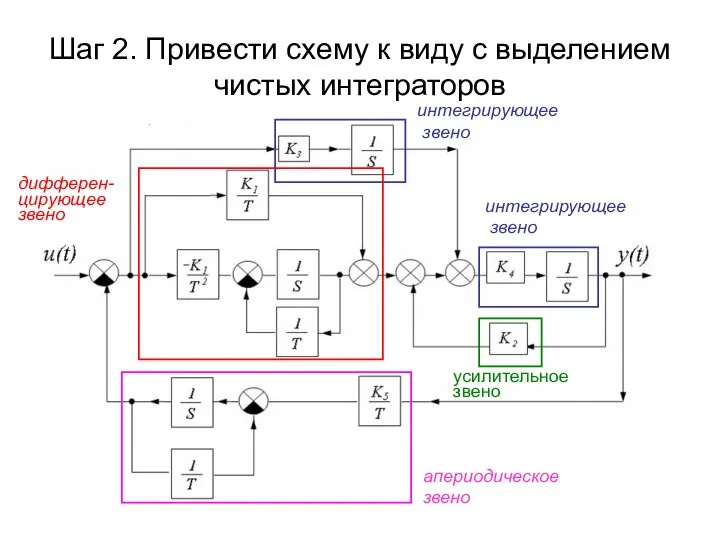
Шаг 2. Привести схему к виду с выделением чистых интеграторов
интегрирующее
звено
дифферен-
цирующее
звено
апериодическое
звено
усилительное
звено
интегрирующее
Шаг 2. Привести схему к виду с выделением чистых интеграторов
интегрирующее
звено
дифферен-
цирующее
звено
апериодическое
звено
усилительное
звено
интегрирующее
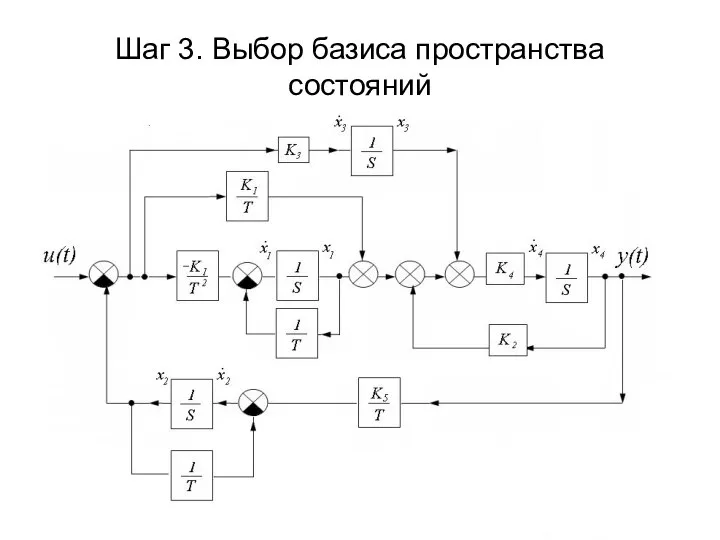
Шаг 3. Выбор базиса пространства состояний
Шаг 3. Выбор базиса пространства состояний

Шаг 4. Описание входов интеграторов
Шаг 4. Описание входов интеграторов
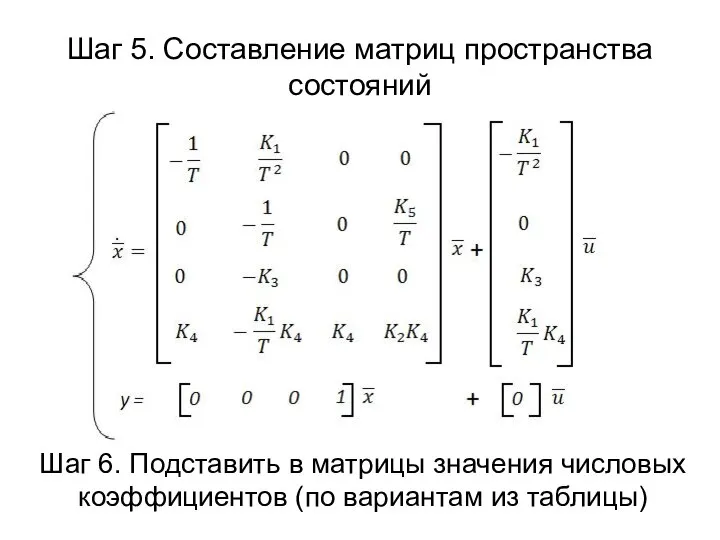
Шаг 5. Составление матриц пространства состояний
Шаг 6. Подставить в матрицы значения
Шаг 5. Составление матриц пространства состояний
Шаг 6. Подставить в матрицы значения
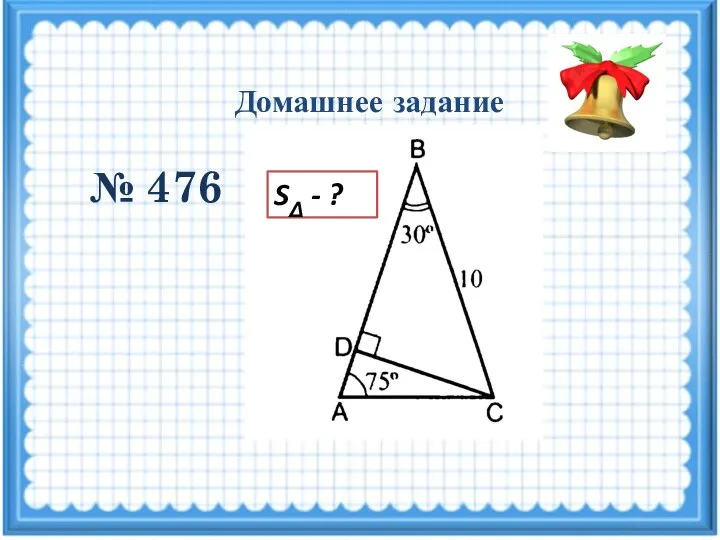 Домашнее задание № 476
Домашнее задание № 476 Математико-статистическое методы в педагогических исследованиях
Математико-статистическое методы в педагогических исследованиях Счастливый случай Урок – семинар “Функции и их графики” 9 класс
Счастливый случай Урок – семинар “Функции и их графики” 9 класс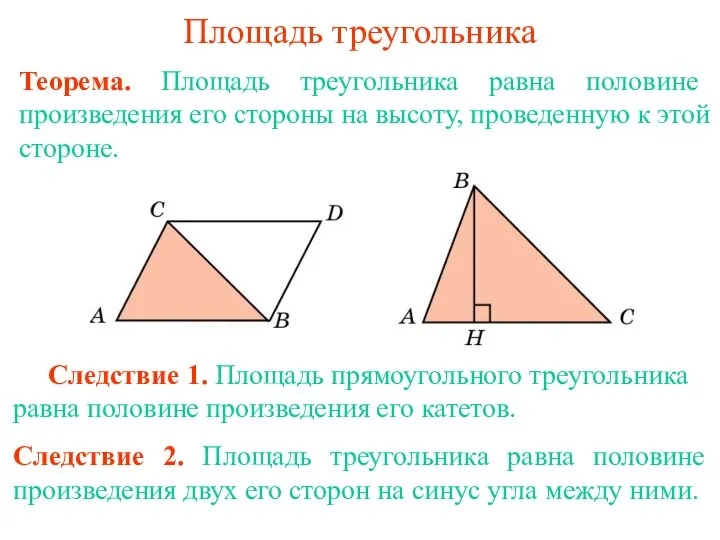 Площадь треугольника
Площадь треугольника Математическая викторина. 7 класс
Математическая викторина. 7 класс Взаимное расположение плоскостей. Параллельные плоскости
Взаимное расположение плоскостей. Параллельные плоскости Морской бой. Математическая игра
Морской бой. Математическая игра Столбчатые диаграммы
Столбчатые диаграммы Презентация по математике "Паралелльность прямых" - скачать бесплатно
Презентация по математике "Паралелльность прямых" - скачать бесплатно Преобразование иррациональных выражений
Преобразование иррациональных выражений Координатная плоскость. Рисуем координатами
Координатная плоскость. Рисуем координатами Методика изучения случайных величин и их характеристик в курсе алгебры и начала анализа
Методика изучения случайных величин и их характеристик в курсе алгебры и начала анализа Фабрика звезд. Игра
Фабрика звезд. Игра Дроби разные нужны, дроби разные важны! (6 класс)
Дроби разные нужны, дроби разные важны! (6 класс) Лист Мебиуса
Лист Мебиуса Урок математики
Урок математики Измерение углов
Измерение углов Предел последовательности
Предел последовательности Натуральные числа. Комбинаторные задачи
Натуральные числа. Комбинаторные задачи Обыкновенные дроби
Обыкновенные дроби Упрощение выражений (2)
Упрощение выражений (2) Многоугольники. Их формы
Многоугольники. Их формы Леонард Эйлер
Леонард Эйлер Тапкырлаучыны тамыр тамгасы тышына чыгару. Тапкырлаучыны тамыр тамгасы астына кертү. 8 klass
Тапкырлаучыны тамыр тамгасы тышына чыгару. Тапкырлаучыны тамыр тамгасы астына кертү. 8 klass Графики функций. Подготовка к ГИА
Графики функций. Подготовка к ГИА ПЛОЩАДЬ. ЕДИНИЦЫ ПЛОЩАДИ.
ПЛОЩАДЬ. ЕДИНИЦЫ ПЛОЩАДИ.  Положительные и отрицательные числа. 6 класс
Положительные и отрицательные числа. 6 класс Правила вычисления производных
Правила вычисления производных