- Системы ходов. Виды теодолитных ходов

Содержание
- 2. Виды теодолитных ходов 1. Замкнутые
- 3. Измерены Горизонтальные углы β, магнитный азимут Am0. Расстояния по линиям l Вертикальные углы ν или превышения
- 4. 1) Вычисляют измеренную сумму внутренних углов 2) Теоретическую сумму внутренних углов 3) Невязку углов по ходу
- 5. 7) Исправляют углы β за невязку углов 8) Вычисляют дирекционный угол α0 начального направления 9) Дирекционные
- 6. 11) Вычисляют приращения координат на всех линиях 12) Невязки по x и y для линий замкнутого
- 7. 15) Исправляют приращения координат за невязки 16) Вычисляют прямоугольные координаты точек ☺ Обработка теодолитного хода
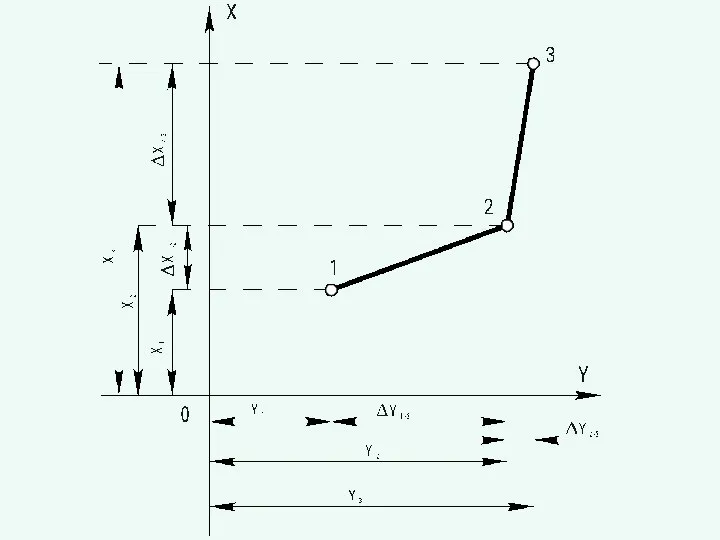
- 8. Определение плановых координат точек на местности XB = XA + ΔXAB YB = YA + ΔYAB
- 10. Нарисовать схему теодолитного хода и нанести на неё значения измеренных горизонтальных углов и вычисленных горизонтальных проложений
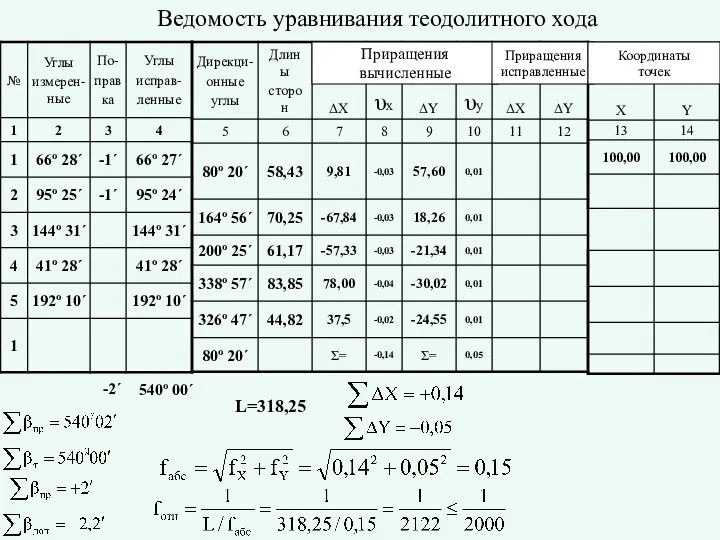
- 11. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода
- 12. 3. Просуммировать измеренные горизонтальные углы 4. Определить теоретическую сумму углов
- 13. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода
- 15. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода
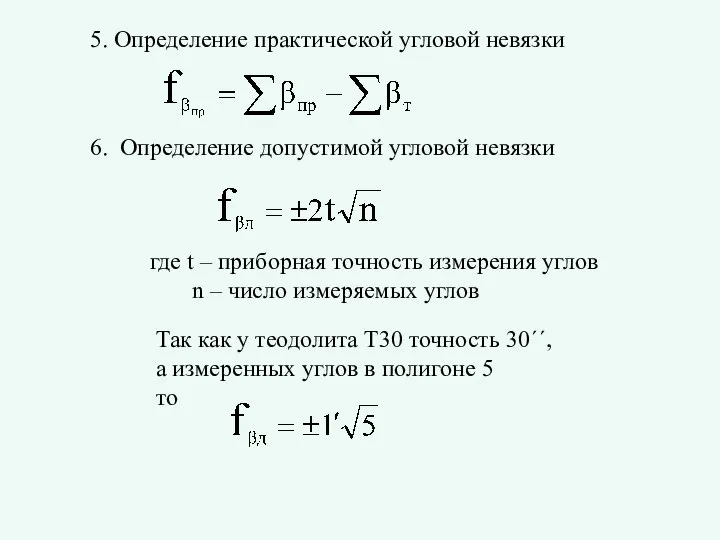
- 16. 7. Определение значений поправок в измеренные углы 8. Вычисление исправленных горизонтальных углов 9. Выписать значение исходного
- 17. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода -2´ 540º 00´
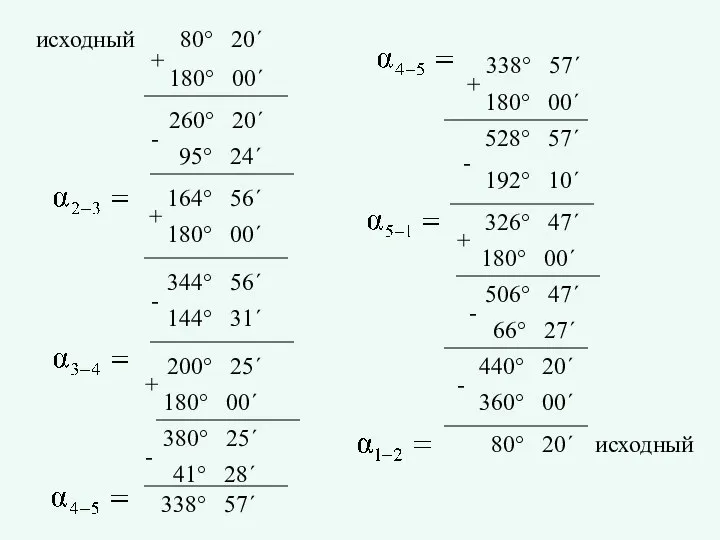
- 18. Правые по ходу углы Левые по ходу углы 10. Вычисление значений остальных дирекционных углов
- 20. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода -2´ 540º 00´
- 21. 11. Определение вычисленных приращений координат ΔX = S cos α ΔY = S sin α
- 22. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода -2´ 540º 00´
- 23. 12. Определение сумм ΔX и ΔY, при этом Определение абсолютной и относительной линейных невязок теодолитного хода
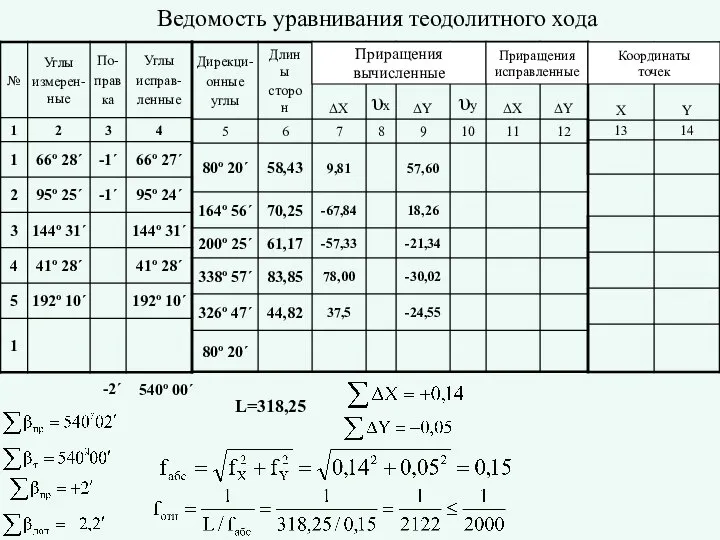
- 24. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода -2´ 540º 00´ L=318,25
- 25. Увязка приращений координат Необходимо разбросать невязки по ΔX и ΔY пропорционально длинам сторон хода и с
- 26. Приращения вычисленные Приращения исправленные Координаты точек Ведомость уравнивания теодолитного хода -2´ 540º 00´ L=318,25
- 27. 16. Вычисление уравненных приращений координат 17. Вычисление координат точек полигона
- 29. Скачать презентацию
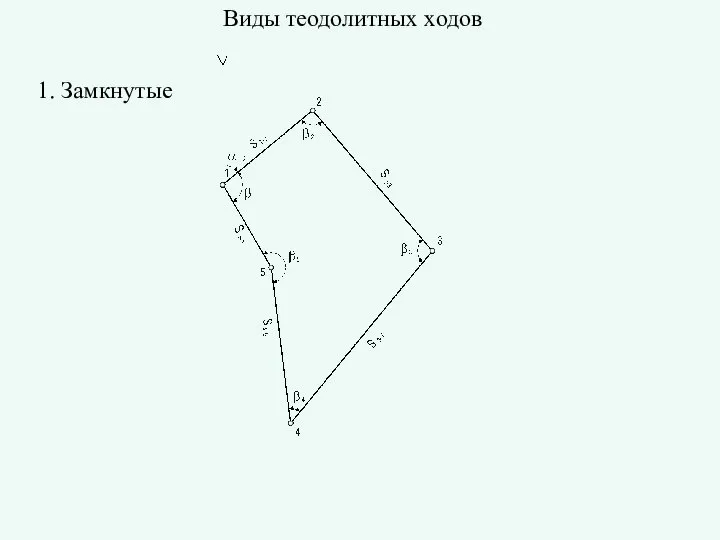
Виды теодолитных ходов
1. Замкнутые
Виды теодолитных ходов
1. Замкнутые

Измерены
Горизонтальные углы β, магнитный азимут Am0.
Расстояния по линиям l
Вертикальные углы
Измерены
Горизонтальные углы β, магнитный азимут Am0.
Расстояния по линиям l
Вертикальные углы
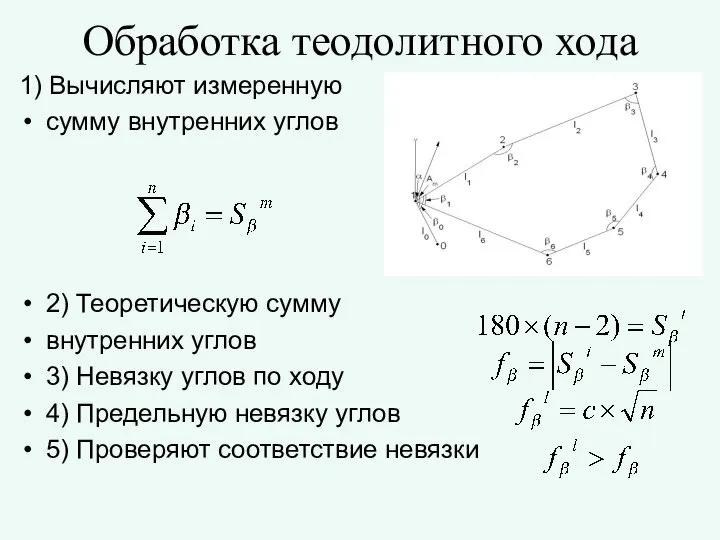
1) Вычисляют измеренную
сумму внутренних углов
2) Теоретическую сумму
внутренних углов
3) Невязку
1) Вычисляют измеренную
сумму внутренних углов
2) Теоретическую сумму
внутренних углов
3) Невязку
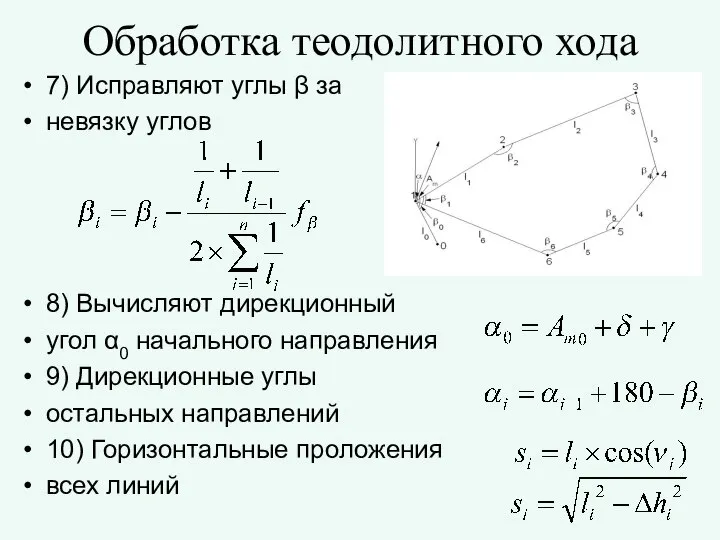
7) Исправляют углы β за
невязку углов
8) Вычисляют дирекционный
угол α0 начального
7) Исправляют углы β за
невязку углов
8) Вычисляют дирекционный
угол α0 начального
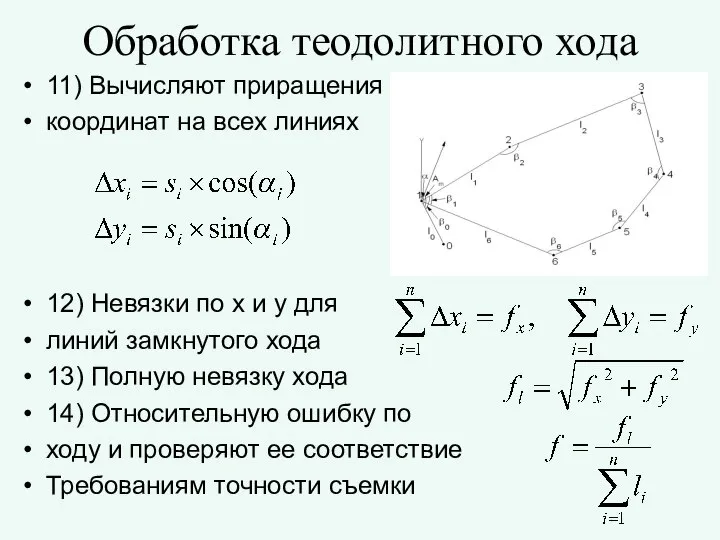
11) Вычисляют приращения
координат на всех линиях
12) Невязки по x и y
11) Вычисляют приращения
координат на всех линиях
12) Невязки по x и y
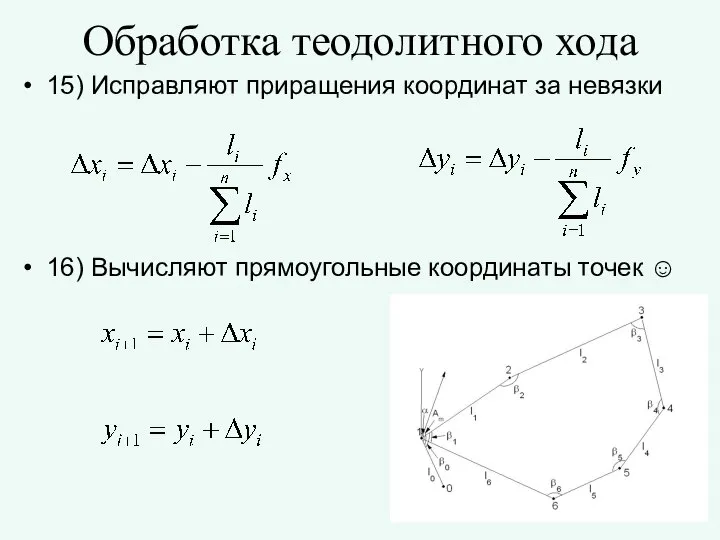
15) Исправляют приращения координат за невязки
16) Вычисляют прямоугольные координаты точек ☺
Обработка
15) Исправляют приращения координат за невязки
16) Вычисляют прямоугольные координаты точек ☺
Обработка

Определение плановых
координат точек
на местности
XB = XA + ΔXAB
YB = YA +
Определение плановых
координат точек
на местности
XB = XA + ΔXAB
YB = YA +
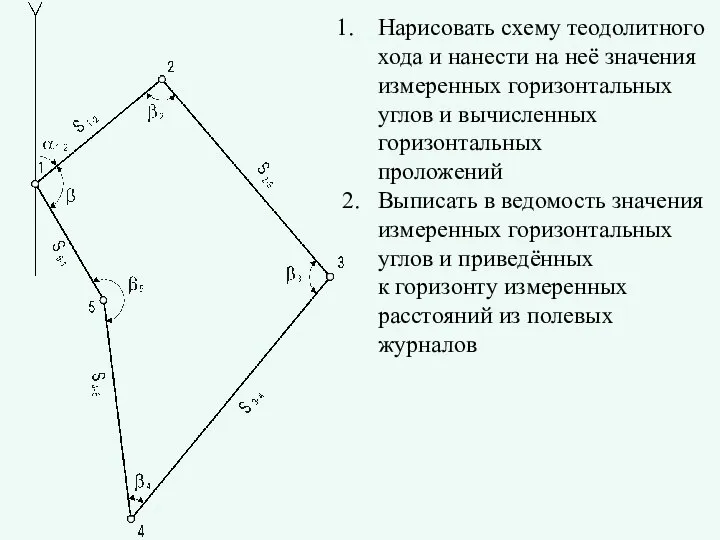
Нарисовать схему теодолитного
хода и нанести на неё значения
измеренных горизонтальных
Нарисовать схему теодолитного
хода и нанести на неё значения
измеренных горизонтальных

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
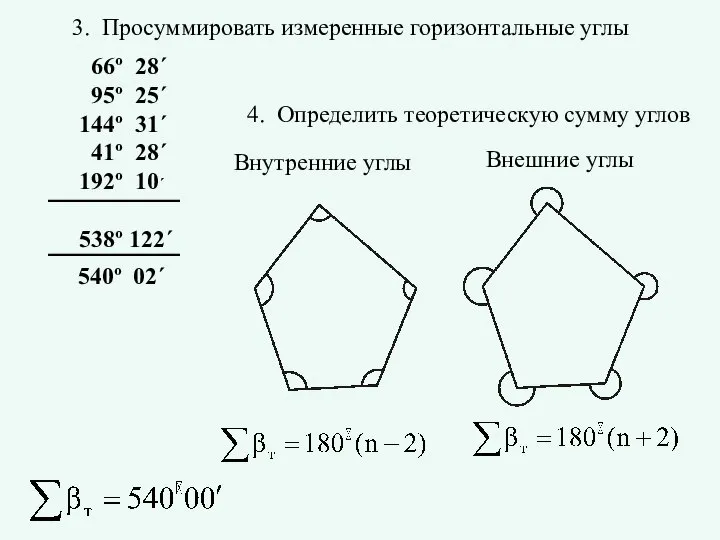
3. Просуммировать измеренные горизонтальные углы
4. Определить теоретическую сумму углов
3. Просуммировать измеренные горизонтальные углы
4. Определить теоретическую сумму углов

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
7. Определение значений поправок в измеренные углы
8. Вычисление исправленных горизонтальных углов
9.
7. Определение значений поправок в измеренные углы
8. Вычисление исправленных горизонтальных углов
9.

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
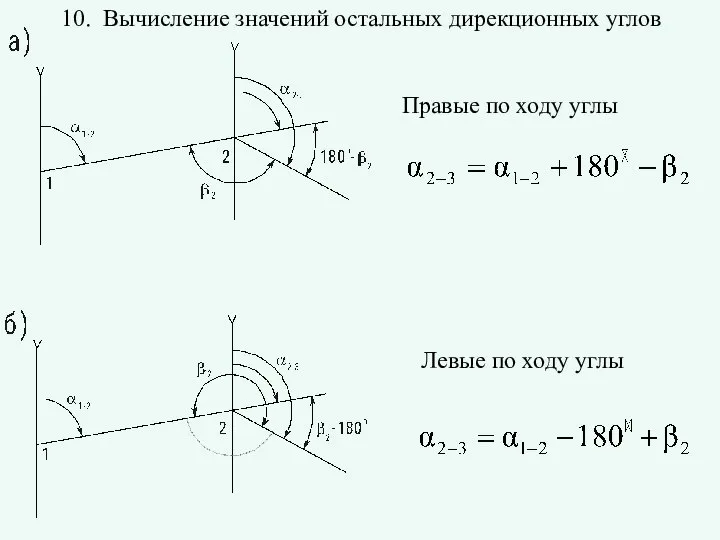
Правые по ходу углы
Левые по ходу углы
10. Вычисление значений остальных дирекционных
Правые по ходу углы
Левые по ходу углы
10. Вычисление значений остальных дирекционных

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
11. Определение вычисленных приращений координат
ΔX = S cos α
ΔY = S
11. Определение вычисленных приращений координат
ΔX = S cos α
ΔY = S

Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
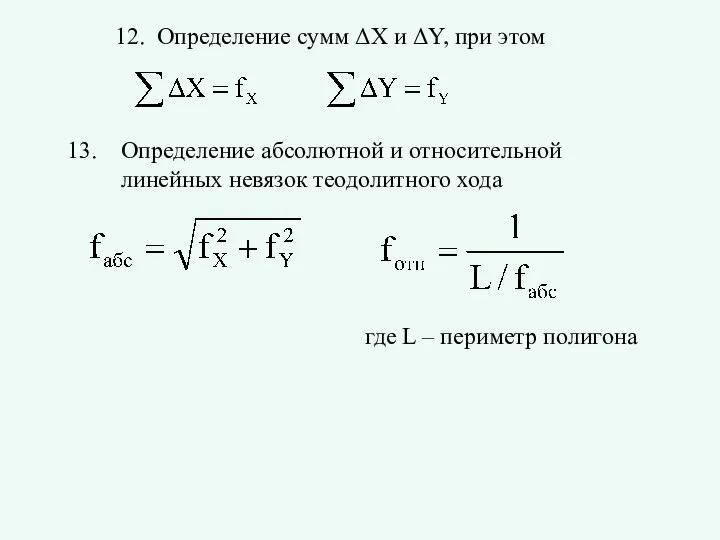
12. Определение сумм ΔX и ΔY, при этом
Определение абсолютной и относительной
12. Определение сумм ΔX и ΔY, при этом
Определение абсолютной и относительной
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
L=318,25
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
L=318,25
Увязка приращений координат
Необходимо разбросать невязки по ΔX и ΔY
пропорционально длинам сторон
Необходимо разбросать невязки по ΔX и ΔY
пропорционально длинам сторон
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
L=318,25
Приращения
вычисленные
Приращения
исправленные
Координаты
точек
Ведомость уравнивания теодолитного хода
-2´
540º 00´
L=318,25
16. Вычисление уравненных приращений координат
17. Вычисление координат точек полигона
16. Вычисление уравненных приращений координат
17. Вычисление координат точек полигона
 Таблица умножения и деления на 5
Таблица умножения и деления на 5 Шар. Устный счет
Шар. Устный счет Теорема о площади треугольника
Теорема о площади треугольника Простейшие задачи в координатах
Простейшие задачи в координатах Задачи практического характера в разных областях науки и техники
Задачи практического характера в разных областях науки и техники Учимся работать циркулем
Учимся работать циркулем Математика и спорт
Математика и спорт Введение в геометрию. Вводное занятие
Введение в геометрию. Вводное занятие Круг и окружность
Круг и окружность Презентация по математике "ПОВТОРЯЕМ ТАБЛИЦУ УМНОЖЕНИЯ" - скачать бесплатно
Презентация по математике "ПОВТОРЯЕМ ТАБЛИЦУ УМНОЖЕНИЯ" - скачать бесплатно Использование игровых технологий на уроках математики в начальной школе
Использование игровых технологий на уроках математики в начальной школе Алгоритм фронта волны
Алгоритм фронта волны Квадратный корень. Арифметический квадратный корень
Квадратный корень. Арифметический квадратный корень Презентация по математике "В математику тропинки одолеем без запинки" - скачать
Презентация по математике "В математику тропинки одолеем без запинки" - скачать  Решение квадратных уравнений различного вида, разными способами
Решение квадратных уравнений различного вида, разными способами Виды многогранников
Виды многогранников Делители и кратные
Делители и кратные Основы функционального анализа. Глава 2. Линейные нормированные пространства
Основы функционального анализа. Глава 2. Линейные нормированные пространства Измерение отрезков
Измерение отрезков Правила вычисления производных
Правила вычисления производных B_11. Вычисление объема многогранников
B_11. Вычисление объема многогранников Повторение теории: окружность, касательная, касательные и хорды, касательные и секущие
Повторение теории: окружность, касательная, касательные и хорды, касательные и секущие Невский проспект Санкт-Петербурга в цифрах (часть 3)
Невский проспект Санкт-Петербурга в цифрах (часть 3) Основное свойство дроби
Основное свойство дроби Решение задач с помощью уравнений. 7 класс
Решение задач с помощью уравнений. 7 класс Методы решения уравнений
Методы решения уравнений Площади четырехугольников
Площади четырехугольников Многоугольники
Многоугольники