- Система управління вертольотом

Содержание
- 2. Навчальні питання і розподіл часу 1. Загальна характеристика органів управління. 2. Повздовжнє, поперечне, шляхове управління. 3.
- 3. 1. Загальна характеристика органів управління. Управління вертольотом призначено для зміни положення балансування вертольота у польоті щодо
- 4. 2. Повздовжнє, поперечне, шляхове управління. Подовжнє і поперечне управління здійснюється однією ручкою (РУВ), від якої зусилля
- 5. Ручка управління лівого і правого льотчиків: 1 – отвір для фіксації ручки в нейтральному положенні; 2
- 6. РУВ кріпиться до підлоги на кронштейні по карданній схемі (див. мал. 2.13). В місці кріплення є
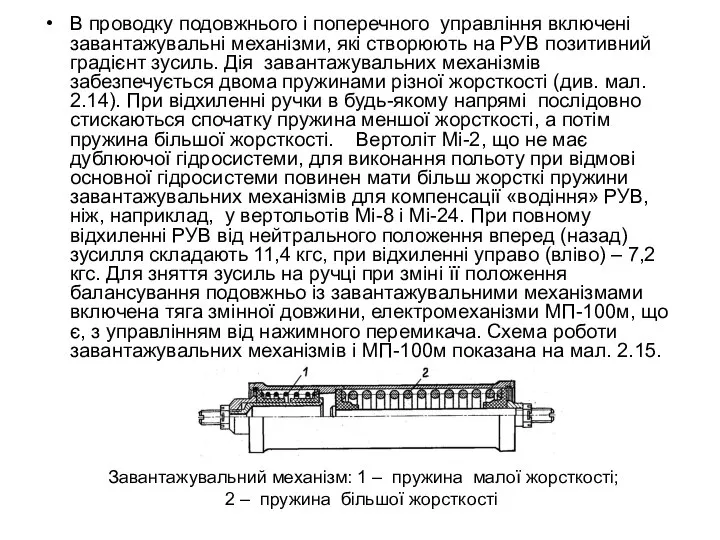
- 7. В проводку подовжнього і поперечного управління включені завантажувальні механізми, які створюють на РУВ позитивний градієнт зусиль.
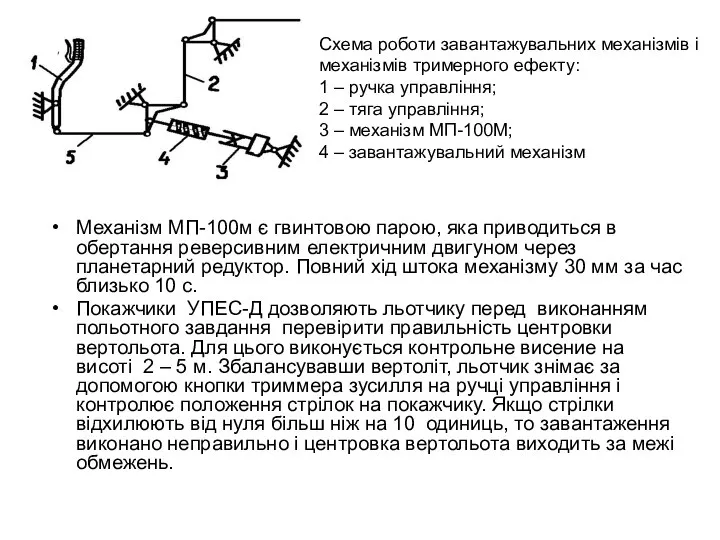
- 8. Механізм МП-100м є гвинтовою парою, яка приводиться в обертання реверсивним електричним двигуном через планетарний редуктор. Повний
- 9. Ножне управління (педалі) призначено для путнього управління вертольота шляхом зміни кроку (а, отже, і тяга) рульового
- 10. Педалі путнього управління і схема роботи пружинного компенсатора: 1 – важелі і тяга параллелограммного механізму; 2
- 11. 3. Обєднане управління загальним кроком несучого гвинта, двигунами та стабілізатором. Об’єднане керування кроком несучого гвинта, стабілізатором
- 12. 4. Автомат перекосу. Автомат перекосу це механізм керування загальним і циклічним кроком НГ, що забезпечує зміну
- 13. Автомат перекосу: 1, 4 − вертикальні тяги; 2 − підшипник; 3 − повідок; 5 − тарілка;
- 14. Схема забезпечення випередження керування в автоматі перекосу: 1 – кріплення тяги поперечного керування від гідропідсилювача; 2
- 16. Скачать презентацию
Навчальні питання і розподіл часу
1. Загальна характеристика органів управління.
2. Повздовжнє, поперечне,
Навчальні питання і розподіл часу
1. Загальна характеристика органів управління.
2. Повздовжнє, поперечне,
1. Загальна характеристика органів управління.
Управління вертольотом призначено для зміни положення
1. Загальна характеристика органів управління.
Управління вертольотом призначено для зміни положення
2. Повздовжнє, поперечне, шляхове управління.
Подовжнє і поперечне управління здійснюється однією ручкою
2. Повздовжнє, поперечне, шляхове управління.
Подовжнє і поперечне управління здійснюється однією ручкою
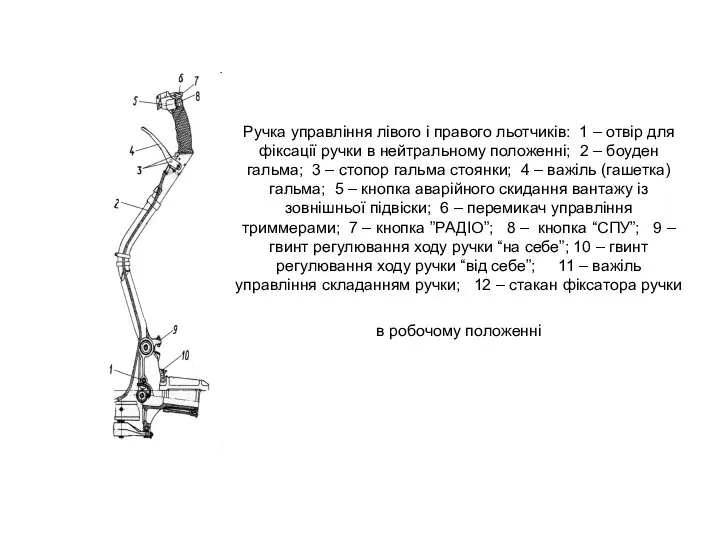
Ручка управління лівого і правого льотчиків: 1 – отвір для фіксації
Ручка управління лівого і правого льотчиків: 1 – отвір для фіксації
РУВ кріпиться до підлоги на кронштейні по карданній схемі (див. мал.
РУВ кріпиться до підлоги на кронштейні по карданній схемі (див. мал.
В проводку подовжнього і поперечного управління включені завантажувальні механізми, які створюють
В проводку подовжнього і поперечного управління включені завантажувальні механізми, які створюють
Механізм МП-100м є гвинтовою парою, яка приводиться в обертання реверсивним електричним
Механізм МП-100м є гвинтовою парою, яка приводиться в обертання реверсивним електричним
Ножне управління (педалі) призначено для путнього управління вертольота шляхом зміни кроку
Ножне управління (педалі) призначено для путнього управління вертольота шляхом зміни кроку

Педалі путнього управління і схема роботи пружинного компенсатора: 1 –
Педалі путнього управління і схема роботи пружинного компенсатора: 1 –
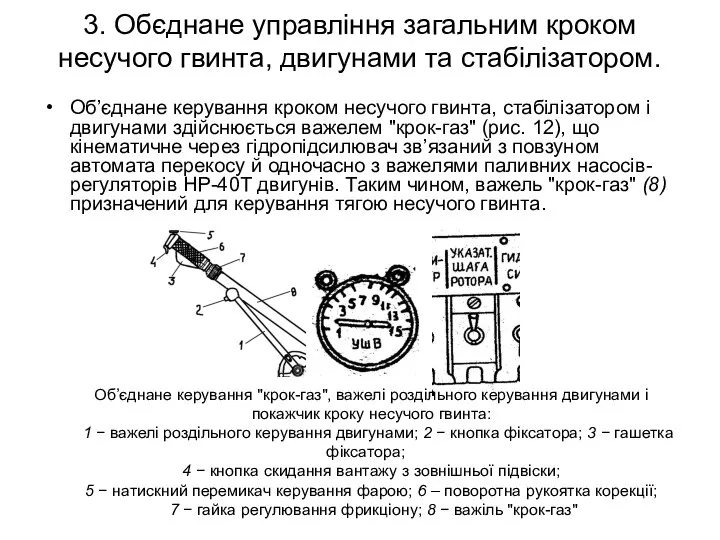
3. Обєднане управління загальним кроком несучого гвинта, двигунами та стабілізатором.
Об’єднане керування
3. Обєднане управління загальним кроком несучого гвинта, двигунами та стабілізатором.
Об’єднане керування
4. Автомат перекосу.
Автомат перекосу це механізм керування загальним і циклічним кроком
4. Автомат перекосу.
Автомат перекосу це механізм керування загальним і циклічним кроком

Автомат перекосу:
1, 4 − вертикальні тяги;
2 − підшипник;
3
Автомат перекосу:
1, 4 − вертикальні тяги;
2 − підшипник;
3
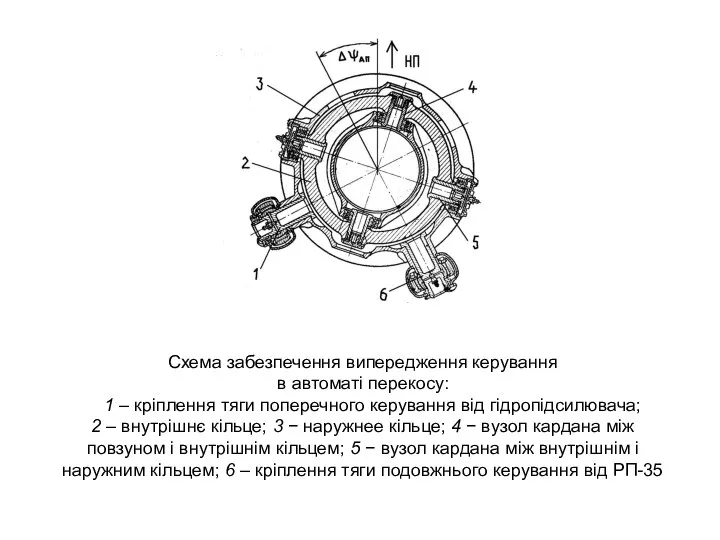
Схема забезпечення випередження керування
в автоматі перекосу:
1 – кріплення тяги
Схема забезпечення випередження керування в автоматі перекосу: 1 – кріплення тяги
 Тепловой и солнечный удар
Тепловой и солнечный удар Диагностика и лечение варикозной болезни вен нижних конечностей
Диагностика и лечение варикозной болезни вен нижних конечностей Судебная медицина. Организация судебномедицинской службы
Судебная медицина. Организация судебномедицинской службы Методы иследования систем и органов у детей
Методы иследования систем и органов у детей Рецепты естественной жизни: питание
Рецепты естественной жизни: питание Околочелюстные абсцессы и флегмоны
Околочелюстные абсцессы и флегмоны Оказание паллиативной медицинской помощи, в части назначения, выписки и обеспечения обезболивающими средствами
Оказание паллиативной медицинской помощи, в части назначения, выписки и обеспечения обезболивающими средствами Lichidul cefalorahidian (fluidul cerobrospinal)
Lichidul cefalorahidian (fluidul cerobrospinal) Компьютерная томография
Компьютерная томография Формы ЛВД, ассоциированные с двигательными расстройствами
Формы ЛВД, ассоциированные с двигательными расстройствами Исследование маркеров эффективности трансляции в постуральной мышце человека в условиях 3 - суточной женской иммерсии
Исследование маркеров эффективности трансляции в постуральной мышце человека в условиях 3 - суточной женской иммерсии Адъювантная терапия рака молочной железы
Адъювантная терапия рака молочной железы Перелом верхней челюсти. Классификация, клиника, диагностика. Лечение
Перелом верхней челюсти. Классификация, клиника, диагностика. Лечение Нормальная и патологическая гистология лимфоидных тканей
Нормальная и патологическая гистология лимфоидных тканей Дифференциальный диагноз при аритмиях. Клиническая и ЭКГ-диагностика. Принципы лечения и неотложная помощь
Дифференциальный диагноз при аритмиях. Клиническая и ЭКГ-диагностика. Принципы лечения и неотложная помощь Использование современных технологий в работе воспитателей и логопедов ДОУ: игровой самомассаж
Использование современных технологий в работе воспитателей и логопедов ДОУ: игровой самомассаж پرستاري_بهداشت_مادران_و_نوزادان
پرستاري_بهداشت_مادران_و_نوزادان Клиническая и лабораторноинструментальная диагностика диффузного токсического зоба. Тиреотоксический криз
Клиническая и лабораторноинструментальная диагностика диффузного токсического зоба. Тиреотоксический криз Особенности первичной позитивной профилактики аддиктивного поведения в образовательных учреждениях
Особенности первичной позитивной профилактики аддиктивного поведения в образовательных учреждениях Несеп тас ауруы. Несепағар, қуық және зәр шығару арнасының тастары
Несеп тас ауруы. Несепағар, қуық және зәр шығару арнасының тастары Формы опухоли
Формы опухоли Аутоиммунная гемолитическая анемия
Аутоиммунная гемолитическая анемия СПИД Подари себе жизнь
СПИД Подари себе жизнь Судебная медицина
Судебная медицина Санитарно-гигиеническая оценка мяса, мясных продуктов и рыбы
Санитарно-гигиеническая оценка мяса, мясных продуктов и рыбы Психотропное вещество как элемент оружия
Психотропное вещество как элемент оружия Халықтың радиациялық қауіпсіздігін қамтамасыз ету мен қоршаған ортаны радиоактивті ластанулардан қорғау бойынша
Халықтың радиациялық қауіпсіздігін қамтамасыз ету мен қоршаған ортаны радиоактивті ластанулардан қорғау бойынша Бір жасқа дейінгі дені сау балалардың диспансерлік бақылау, патронаж
Бір жасқа дейінгі дені сау балалардың диспансерлік бақылау, патронаж