- Actuators and sensors. Part 1

Содержание
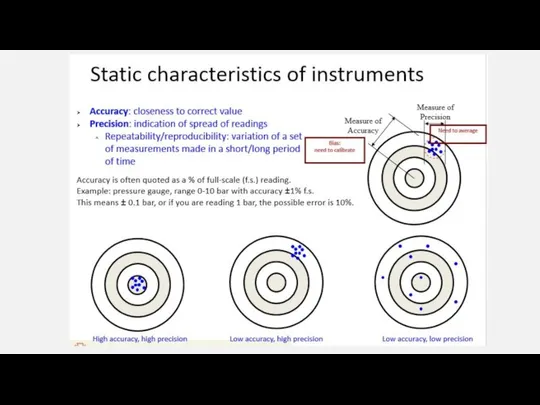
- 2. OUTLINE Motivation, why robots need sensors? Difference between actuators and sensors Robotic sensor classification Sensor Performance
- 3. Sensors in Robotics are primarily used for two different purposes: 1. Give the robot information about
- 4. Examples: DC motors Servo motors Stepper motors Examples: Temperature sensors Humidity sensors Light level sensors
- 5. Any kind of device that converts one kind of energy into another Sensors: input transducers Actuators:
- 6. COMMON COMPLETE ROBOT SYSTEM Take in a physical property through the sensor; Converting to electrical property
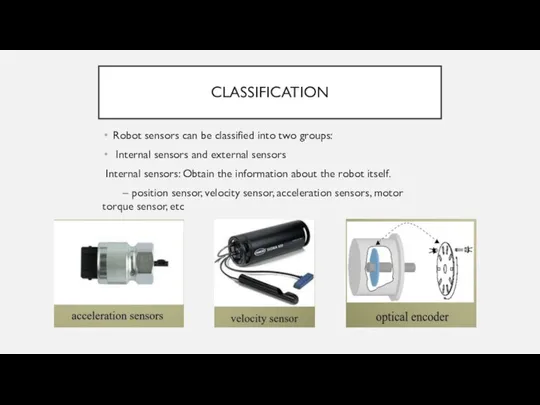
- 7. CLASSIFICATION Robot sensors can be classified into two groups: Internal sensors and external sensors Internal sensors:
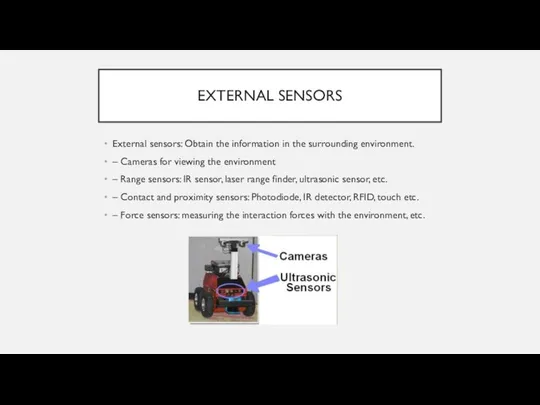
- 8. EXTERNAL SENSORS External sensors: Obtain the information in the surrounding environment. – Cameras for viewing the
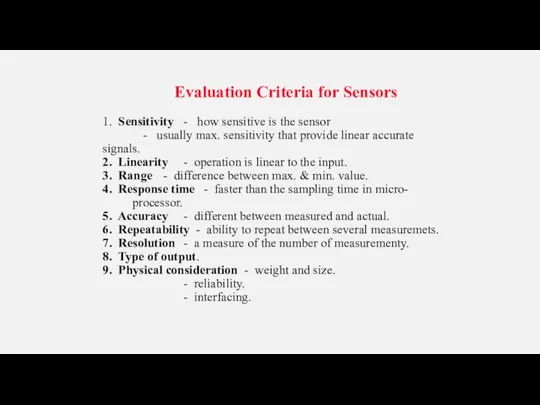
- 9. Evaluation Criteria for Sensors 1. Sensitivity - how sensitive is the sensor - usually max. sensitivity
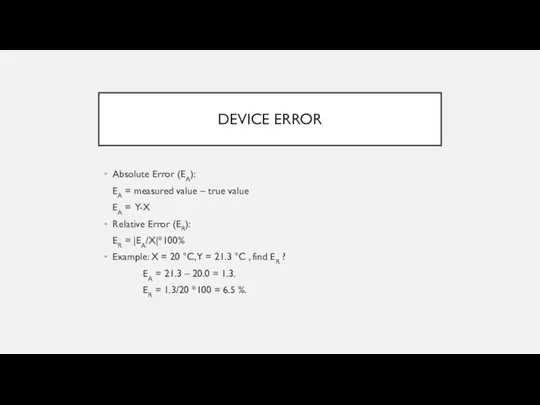
- 11. DEVICE ERROR Absolute Error (EA): EA = measured value – true value EA = Y-X Relative
- 12. TOLERANCE (LIMITING ERROR) For certain devices (components) we use Tolerance instead of Error. A resistor has
- 13. ACCURACY & INACCURACY Definition: A measure of how close the output of the Instrument (measured value
- 14. Example: X = 20 °C, Y = 21.3 °C , find AA &AR ? EA =
- 15. ANALOG SENSOR: POTENTIOMETER Analog sensor for measuring the rotational position Potentiometer = varying resistance Resistance changes
- 16. SENSOR RESPONSE CURVE FOR POTENTIOMETER Used to define different kind of properties of sensor including errors.
- 17. RANGE (FULL SCALE) The difference between the minimum angle and the maximum angle
- 18. NONLINEARITY ERROR
- 19. SENSITIVITY The amount of change in the output -> results from a particular change in the
- 21. Скачать презентацию
OUTLINE
Motivation, why robots need sensors?
Difference between actuators and sensors
Robotic sensor classification
Sensor
OUTLINE
Motivation, why robots need sensors?
Difference between actuators and sensors
Robotic sensor classification
Sensor
Sensors in Robotics are primarily used for two different purposes:
1. Give
Sensors in Robotics are primarily used for two different purposes:
1. Give
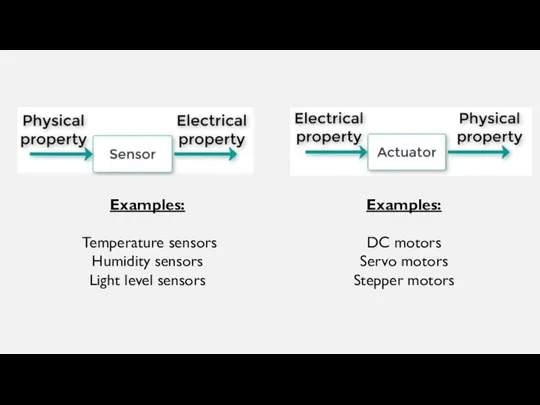
Examples:
DC motors
Servo motors
Stepper motors
Examples:
Temperature sensors
Humidity sensors
Light level sensors
Examples:
DC motors
Servo motors
Stepper motors
Examples:
Temperature sensors
Humidity sensors
Light level sensors
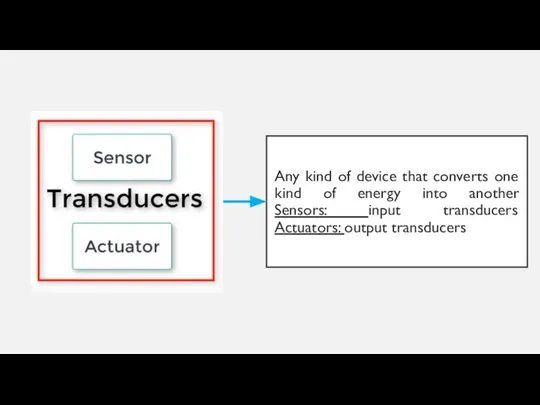
Any kind of device that converts one kind of energy into
Any kind of device that converts one kind of energy into
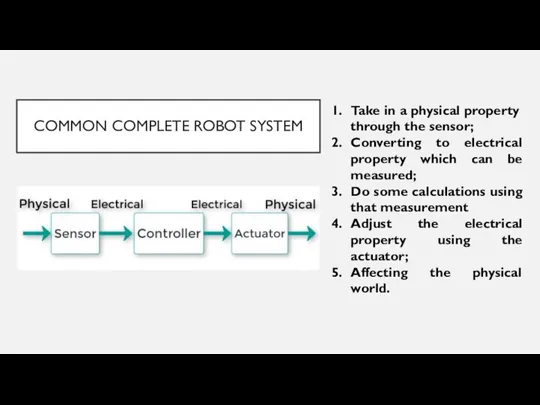
COMMON COMPLETE ROBOT SYSTEM
Take in a physical property through the sensor;
Converting
COMMON COMPLETE ROBOT SYSTEM
Take in a physical property through the sensor;
Converting
CLASSIFICATION
Robot sensors can be classified into two groups:
Internal sensors and
CLASSIFICATION
Robot sensors can be classified into two groups:
Internal sensors and
EXTERNAL SENSORS
External sensors: Obtain the information in the surrounding environment.
–
EXTERNAL SENSORS
External sensors: Obtain the information in the surrounding environment.
–
Evaluation Criteria for Sensors
1. Sensitivity - how sensitive is the sensor
-
Evaluation Criteria for Sensors
1. Sensitivity - how sensitive is the sensor
-
DEVICE ERROR
Absolute Error (EA):
EA = measured value – true value
EA =
DEVICE ERROR
Absolute Error (EA):
EA = measured value – true value
EA =

TOLERANCE (LIMITING ERROR)
For certain devices (components) we use Tolerance instead of
TOLERANCE (LIMITING ERROR)
For certain devices (components) we use Tolerance instead of
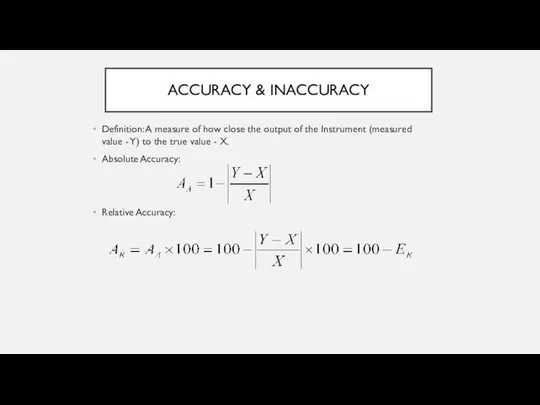
ACCURACY & INACCURACY
Definition: A measure of how close the output of
ACCURACY & INACCURACY
Definition: A measure of how close the output of
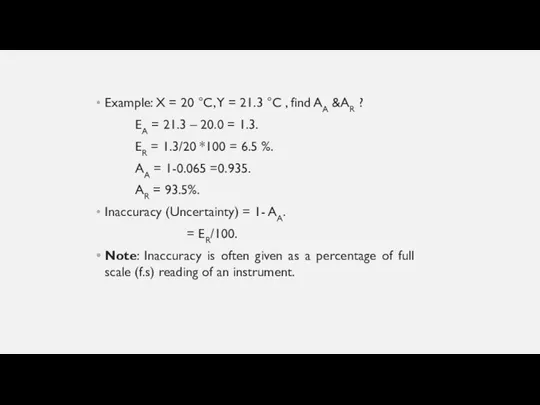
Example: X = 20 °C, Y = 21.3 °C , find
Example: X = 20 °C, Y = 21.3 °C , find
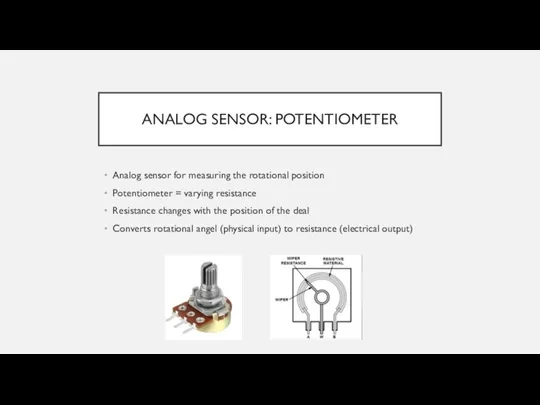
ANALOG SENSOR: POTENTIOMETER
Analog sensor for measuring the rotational position
Potentiometer = varying
ANALOG SENSOR: POTENTIOMETER
Analog sensor for measuring the rotational position
Potentiometer = varying
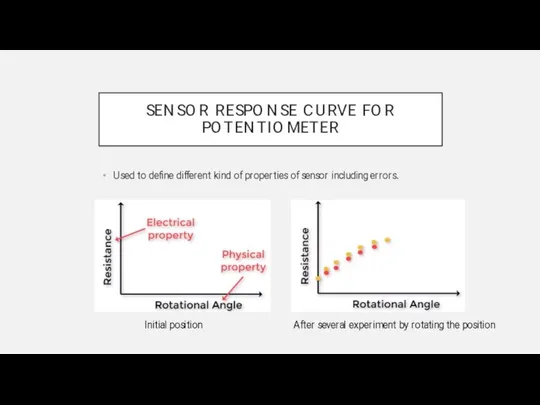
SENSOR RESPONSE CURVE FOR POTENTIOMETER
Used to define different kind of properties
SENSOR RESPONSE CURVE FOR POTENTIOMETER
Used to define different kind of properties
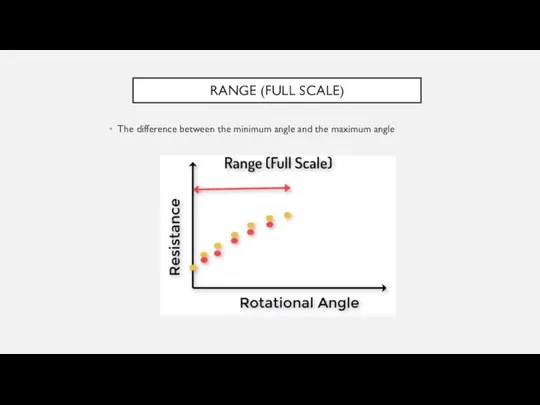
RANGE (FULL SCALE)
The difference between the minimum angle and the maximum
RANGE (FULL SCALE)
The difference between the minimum angle and the maximum
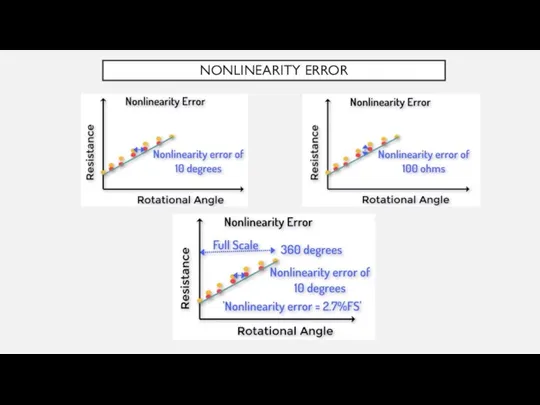
NONLINEARITY ERROR
NONLINEARITY ERROR
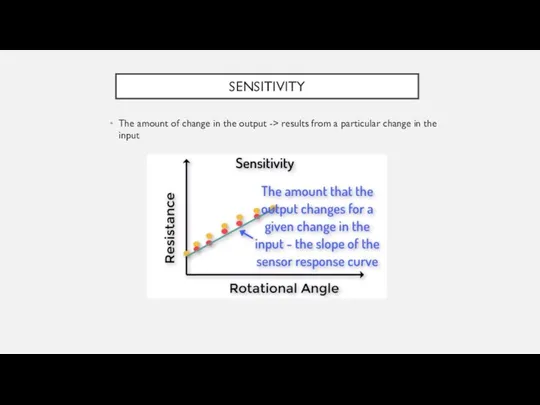
SENSITIVITY
The amount of change in the output -> results from a
SENSITIVITY
The amount of change in the output -> results from a
 Чистописание
Чистописание Проект с MS Project
Проект с MS Project Разработка мероприятий по ремонту вспомогательного тормоза условный №254 электровоза ВЛ10 в объеме КР
Разработка мероприятий по ремонту вспомогательного тормоза условный №254 электровоза ВЛ10 в объеме КР 20140513_obshchestvo_-_6_a_klass
20140513_obshchestvo_-_6_a_klass Схема подвеса
Схема подвеса Отношения ислама и христианства в Средние века
Отношения ислама и христианства в Средние века 20140526_olimpiada_po_obzh
20140526_olimpiada_po_obzh Типы производства. Единичный и мелкосерийный типы производства
Типы производства. Единичный и мелкосерийный типы производства Поліський заповідник
Поліський заповідник Евразия и Африка
Евразия и Африка Плазма. Плазменная лампа
Плазма. Плазменная лампа потери энергии
потери энергии Иқтисодий таҳлилнинг методи ва унда қўлланиладиган анъанавий усуллар
Иқтисодий таҳлилнинг методи ва унда қўлланиладиган анъанавий усуллар Dickens
Dickens Разработка самообучающейся роботизированной платформы
Разработка самообучающейся роботизированной платформы Превосходство в обслуживании клиентов в ФКН
Превосходство в обслуживании клиентов в ФКН f410ebdb0ee43aeaed4ab1012847711a
f410ebdb0ee43aeaed4ab1012847711a Теория конфликта Р. Дарендорфа
Теория конфликта Р. Дарендорфа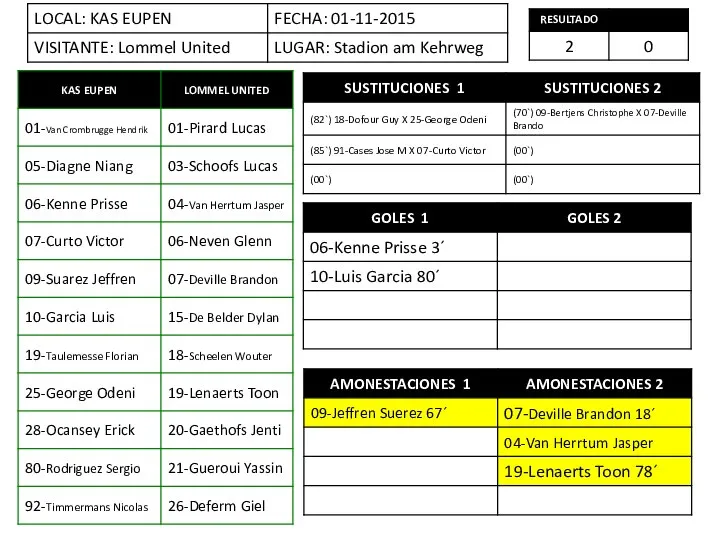 Ficha kas eupen-lommel united
Ficha kas eupen-lommel united Храм у моего дома
Храм у моего дома Персональный сайт как образовательный инструмент саморазвития педагога
Персональный сайт как образовательный инструмент саморазвития педагога 20131026_obobshchenie_opyta
20131026_obobshchenie_opyta Совершенствование процесса приготовления и расширение ассортимента полуфабрикатов из рыбы для сложной кулинарной продукции
Совершенствование процесса приготовления и расширение ассортимента полуфабрикатов из рыбы для сложной кулинарной продукции Deutschstunde 13 (26.12.)
Deutschstunde 13 (26.12.) Резиденция Белорусского Деда Мороза
Резиденция Белорусского Деда Мороза Вітаю с днем народження
Вітаю с днем народження ООО Кабель-магазин
ООО Кабель-магазин Intermediate level
Intermediate level