- Автоматическое управление. Регуляторы

Содержание
- 2. В теории автоматического управления более 100 лет назад был разработан автоматический регулятор (лат. regulo – привожу
- 3. Автоматическое управление. регуляторы Одной из главных задач теории автоматического управления является управление с помощью обратной связи.
- 4. Регулятор – это устройство (совокупность устройств), обеспечивающих желаемое поведение (состояние) системы по определенному закону (алгоритму). Будем
- 5. Релейный регулятор Релейный регулятор - это устройство, имеющее фиксированное количество состояний (действий, положений). Релейным двухпозиционным регулятором
- 6. Движение с одним датчиком освещенности Рассмотрим пример трехколесного Lego-робота с одним датчиком освещенности, который должен двигаться
- 7. Программа на основе релейного двухпозиционного регулятора. В таком регуляторе рассматриваются только два состояния датчика и, соответственно,
- 8. Ветвление Ветвление – часть алгоритма, в которой в зависимости от условия выполняется один или другой набор
- 9. Релейный регулятор: движение вдоль границы черного и белого Задача двигаться по границе черного и белого с
- 10. Двухпозиционный релейный регулятор Двухпозиционный релейный регулятор имеет два состояния: освещенность > серого, освещенность ≤ серого. Двухпозиционный
- 11. Трехпозиционный релейный регулятор Рассмотрим пример когда белое=100, черный=0, окрестность вокруг значения серого ±5 процентов. серый=(белый+черный)/2 свет>70
- 12. Трехпозиционный релейный регулятор Рассмотрим окрестность вокруг значения серого ±5 процентов свет>70 | 70≥свет>30 | свет≤30 белый
- 13. Релейный регулятор: движение с двумя датчиками освещенности Оба датчика на белом – движение прямо Левый датчик
- 14. Релейный четырехпозиционный регулятор: вложенное ветвление На каждой ветви проверки первого датчика идет проверка второго датчика Алгоритм
- 15. Датчик цвета, работая в режиме измерения количества отраженного света, освещает светодиодом поверхность и фиксирует по 100-значной
- 16. Типовые регуляторы Интегральные Пропорциональные пропорционально-дифференциальные пропорционально- интегральные пропорционально- интегрально- дифференциальные регуляторы (сокращенно И, П, ПД, ПИ
- 17. Пропорциональный регулятор В задачах автоматического регулирования управляющее воздействие (u) обычно является функцией динамической ошибки – отклонением
- 18. Пропорциональный регулятор: движение по линии Также как и в релейном регуляторе, необходимо определить среднее значение grey
- 19. Пропорциональная составляющая (П) позволяет задавать управляющие воздействия (u) на моторы (тормозить один мотор и ускорять второй
- 20. Цикл — это многократное исполнение последовательности команд. F значок функции. Необходим для вычисления значения выражения, задания
- 22. Скачать презентацию
В теории автоматического управления более 100 лет назад был разработан автоматический
В теории автоматического управления более 100 лет назад был разработан автоматический
Автоматическое управление. регуляторы
Одной из главных задач теории автоматического управления является управление
Автоматическое управление. регуляторы
Одной из главных задач теории автоматического управления является управление
Регулятор – это устройство (совокупность устройств), обеспечивающих желаемое поведение (состояние) системы
Регулятор – это устройство (совокупность устройств), обеспечивающих желаемое поведение (состояние) системы
Релейный регулятор
Релейный регулятор - это устройство, имеющее фиксированное количество состояний (действий,
Релейный регулятор
Релейный регулятор - это устройство, имеющее фиксированное количество состояний (действий,
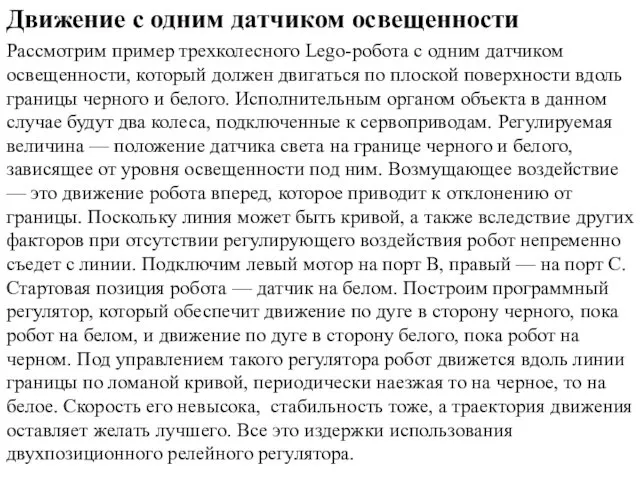
Движение с одним датчиком освещенности
Рассмотрим пример трехколесного Lego-робота с одним датчиком
Движение с одним датчиком освещенности
Рассмотрим пример трехколесного Lego-робота с одним датчиком
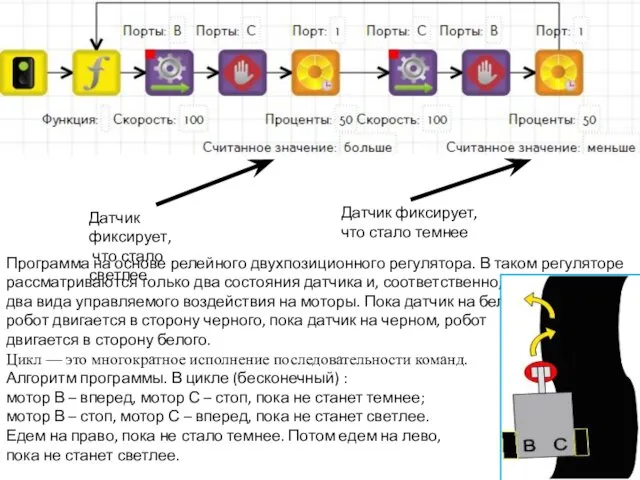
Программа на основе релейного двухпозиционного регулятора. В таком регуляторе рассматриваются только
Программа на основе релейного двухпозиционного регулятора. В таком регуляторе рассматриваются только
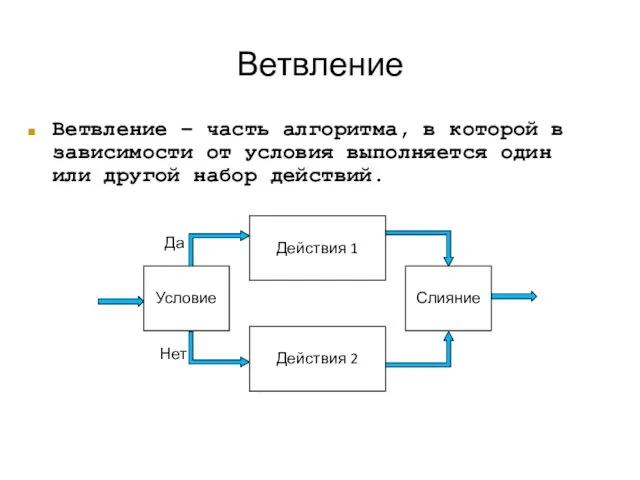
Ветвление
Ветвление – часть алгоритма, в которой в зависимости от условия выполняется
Ветвление
Ветвление – часть алгоритма, в которой в зависимости от условия выполняется
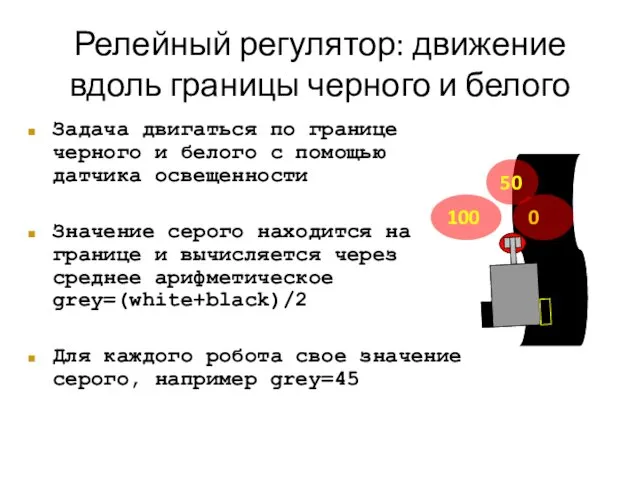
Релейный регулятор: движение вдоль границы черного и белого
Задача двигаться по границе
Релейный регулятор: движение вдоль границы черного и белого
Задача двигаться по границе
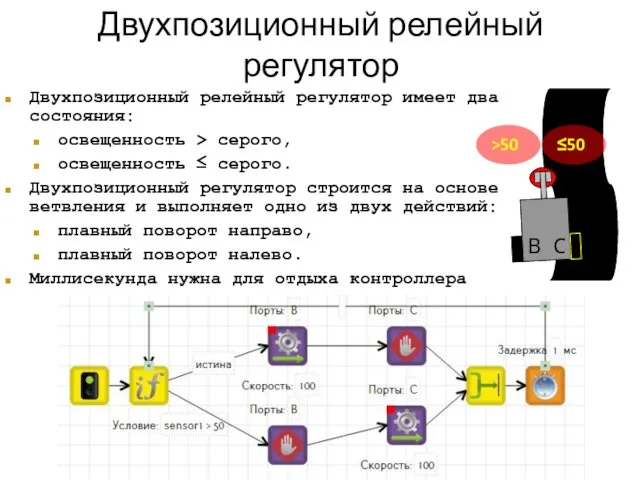
Двухпозиционный релейный регулятор
Двухпозиционный релейный регулятор имеет два состояния:
освещенность > серого,
Двухпозиционный релейный регулятор
Двухпозиционный релейный регулятор имеет два состояния:
освещенность > серого,
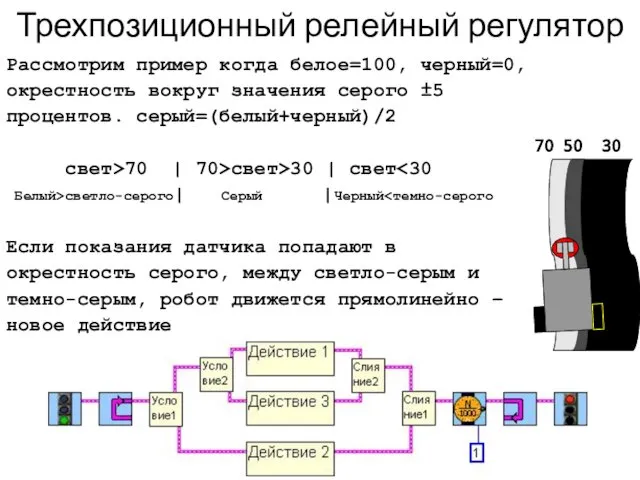
Трехпозиционный релейный регулятор
Рассмотрим пример когда белое=100, черный=0, окрестность вокруг значения серого
Трехпозиционный релейный регулятор
Рассмотрим пример когда белое=100, черный=0, окрестность вокруг значения серого
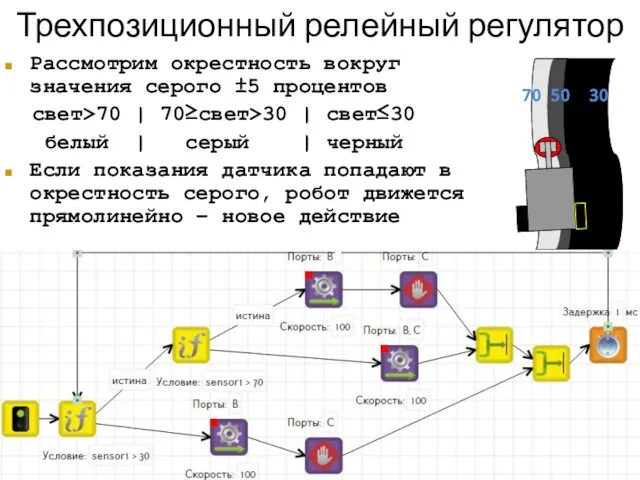
Трехпозиционный релейный регулятор
Рассмотрим окрестность вокруг значения серого ±5 процентов
свет>70 |
Трехпозиционный релейный регулятор
Рассмотрим окрестность вокруг значения серого ±5 процентов
свет>70 |
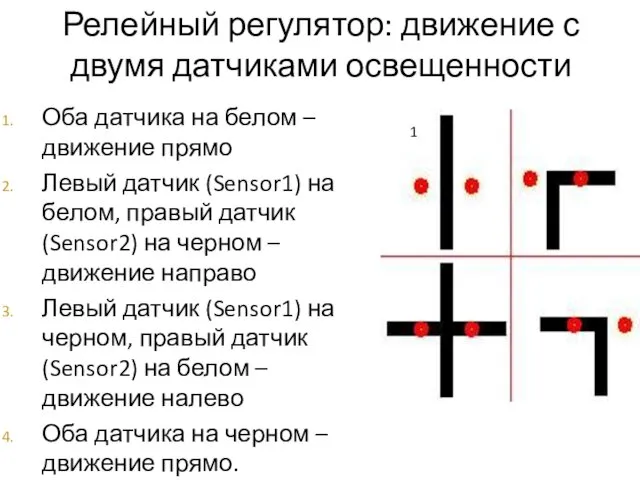
Релейный регулятор: движение с двумя датчиками освещенности
Оба датчика на белом –
Релейный регулятор: движение с двумя датчиками освещенности
Оба датчика на белом –
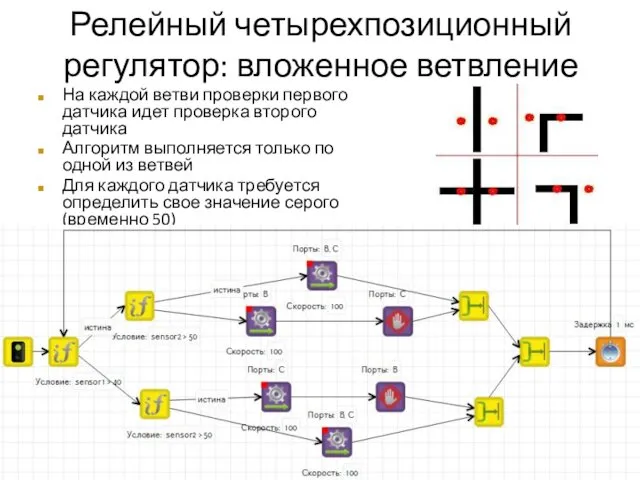
Релейный четырехпозиционный регулятор: вложенное ветвление
На каждой ветви проверки первого датчика идет
Релейный четырехпозиционный регулятор: вложенное ветвление
На каждой ветви проверки первого датчика идет
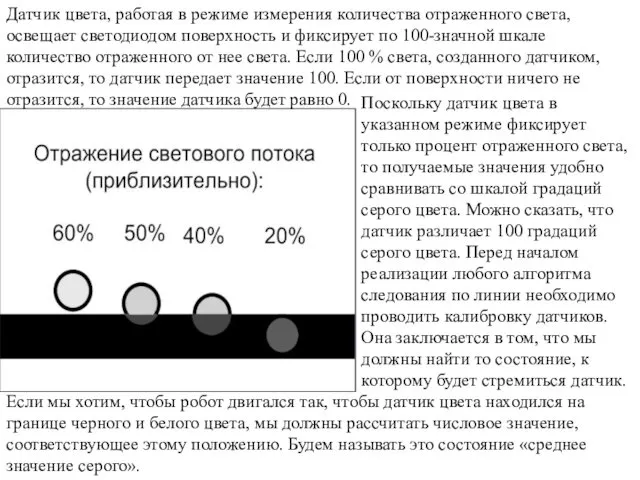
Датчик цвета, работая в режиме измерения количества отраженного света, освещает светодиодом
Датчик цвета, работая в режиме измерения количества отраженного света, освещает светодиодом
Типовые регуляторы
Интегральные
Пропорциональные
пропорционально-дифференциальные
пропорционально- интегральные
пропорционально- интегрально- дифференциальные регуляторы
(сокращенно И, П, ПД, ПИ
Типовые регуляторы
Интегральные
Пропорциональные
пропорционально-дифференциальные
пропорционально- интегральные
пропорционально- интегрально- дифференциальные регуляторы
(сокращенно И, П, ПД, ПИ
Пропорциональный регулятор
В задачах автоматического регулирования управляющее воздействие (u) обычно является функцией
Пропорциональный регулятор
В задачах автоматического регулирования управляющее воздействие (u) обычно является функцией
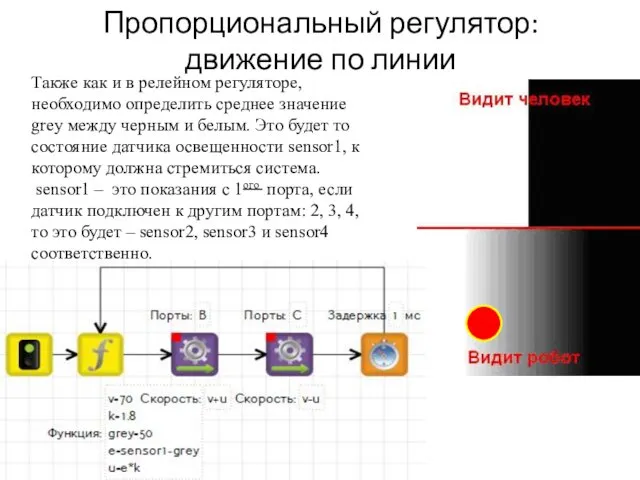
Пропорциональный регулятор: движение по линии
Также как и в релейном регуляторе, необходимо
Пропорциональный регулятор: движение по линии
Также как и в релейном регуляторе, необходимо
Пропорциональная составляющая (П) позволяет задавать управляющие воздействия (u) на моторы (тормозить
Пропорциональная составляющая (П) позволяет задавать управляющие воздействия (u) на моторы (тормозить
Цикл — это многократное исполнение последовательности команд.
F значок функции. Необходим для
Цикл — это многократное исполнение последовательности команд.
F значок функции. Необходим для
 Магнит. Труболовка
Магнит. Труболовка Проект: палеонтологический Музей путешествий
Проект: палеонтологический Музей путешествий Внеземные цивилизации
Внеземные цивилизации Актуализация стратегической программы исследований (СПИ)
Актуализация стратегической программы исследований (СПИ) how to not be terrible at principles
how to not be terrible at principles Ландшафтный дизайн
Ландшафтный дизайн Чтобы осень была золотой
Чтобы осень была золотой презентация 26.08.21 собрание (2)
презентация 26.08.21 собрание (2) Основы формирования интереса к литературному чтению в начальной школе
Основы формирования интереса к литературному чтению в начальной школе Планограммы МТ
Планограммы МТ Вітаю с днем народження
Вітаю с днем народження Шаблон презентации. Объект архитектор
Шаблон презентации. Объект архитектор Початок роботи з Arduino
Початок роботи з Arduino Наименование деталей одежды. Наименование срезов. Направление нитей основы в деталях кроя
Наименование деталей одежды. Наименование срезов. Направление нитей основы в деталях кроя Фильтрационные свойства буровых растворов
Фильтрационные свойства буровых растворов Материалы для дистанционной поддержки учащихся по дополнительной программе Силуэт
Материалы для дистанционной поддержки учащихся по дополнительной программе Силуэт Ручное ткачество
Ручное ткачество Проект космонавтики (Боксарёва) (1)
Проект космонавтики (Боксарёва) (1) Внутреннее устройство компьютера
Внутреннее устройство компьютера Дәнді дақылдар тұқымын егуге даярлау
Дәнді дақылдар тұқымын егуге даярлау Компьютерная томография
Компьютерная томография Особенности проектирования изделий из кожи
Особенности проектирования изделий из кожи Моя кухня
Моя кухня _Эмпирический уровень научного познания_ 10 класс
_Эмпирический уровень научного познания_ 10 класс Западное Подмосковье
Западное Подмосковье Виготовлення методом спрейпіролізу і фізичні властивості плівок FeS2
Виготовлення методом спрейпіролізу і фізичні властивості плівок FeS2 Технология строительных процессов. Тема 2.2
Технология строительных процессов. Тема 2.2 Дизайн для недизайнеров
Дизайн для недизайнеров