- Бег-бот: мобильный робот для подготовки спортсменов-легкоатлетов

Содержание
- 2. Оценить актуальность (должен соответствовать времени) Понять в общих чертах как будет выглядеть робот Прежде чем начать
- 3. Рассматриваем варианты Первый вариант: один двигатель отвечает за скорость, другой за поворот оси передних колес(4 колеса)
- 4. Второй вариант: два двигателя отвечают за скорость и поворот передних колес(4 колеса) Но - сложная кинематика
- 5. Третий вариант: два двигателя отвечают за скорость и поворот передних колес, сзади одно колесо на подшипнике
- 6. Ремесло конструктора Фанера – самый легкодоступный вариант, хорошо обрабатывается. Для обеспечения необходимой жесткости и прочности всей
- 7. используя такие программы, как Компас3D или SolidWorks позволяет учесть важные аспекты: 1) Правильные кабельные трассы. Разложить
- 8. Моделирование и модели Для моделирования необходимо определить какие внешние и внутренние параметры должны быть учтены в
- 9. Мир внутри компьютера Преимущество использования таких таких сред как V-REP, Gazebo в том, что, несмотря на
- 10. Преимущество V-REP состоит в возможности осуществлять програмное взаимодействие скриптов написанных «внешними» программами, Matlab, С++, Python.
- 11. Создавая программу, целью которой является решение элементарных задач возможно оспользование уже готовых решений в интернете, но
- 12. Распределение обязанностей Стратегический уровень системы (управления выполняет самые ресурсоемкие задачи: распознавание видеопотока, расчет маршрута и т.д.)
- 14. Скачать презентацию
Оценить актуальность (должен соответствовать времени)
Понять в общих чертах как будет выглядеть
Оценить актуальность (должен соответствовать времени)
Понять в общих чертах как будет выглядеть
Рассматриваем варианты
Первый вариант: один двигатель отвечает за скорость, другой за поворот
Рассматриваем варианты
Первый вариант: один двигатель отвечает за скорость, другой за поворот
Второй вариант: два двигателя отвечают за скорость и поворот передних колес(4
Второй вариант: два двигателя отвечают за скорость и поворот передних колес(4

Третий вариант: два двигателя отвечают за скорость и поворот передних колес,
Третий вариант: два двигателя отвечают за скорость и поворот передних колес,
Ремесло конструктора
Фанера – самый легкодоступный вариант, хорошо обрабатывается. Для обеспечения
Ремесло конструктора
Фанера – самый легкодоступный вариант, хорошо обрабатывается. Для обеспечения
используя такие программы, как Компас3D или SolidWorks позволяет учесть важные аспекты:
1)
используя такие программы, как Компас3D или SolidWorks позволяет учесть важные аспекты:
1)
Моделирование и модели
Для моделирования необходимо определить какие внешние и внутренние параметры
Моделирование и модели
Для моделирования необходимо определить какие внешние и внутренние параметры
Мир внутри компьютера
Преимущество использования таких таких сред как V-REP, Gazebo в
Мир внутри компьютера
Преимущество использования таких таких сред как V-REP, Gazebo в
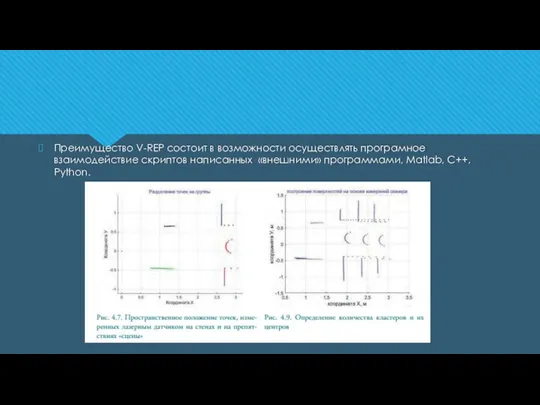
Преимущество V-REP состоит в возможности осуществлять програмное взаимодействие скриптов написанных «внешними»
Преимущество V-REP состоит в возможности осуществлять програмное взаимодействие скриптов написанных «внешними»
Создавая программу, целью которой является решение элементарных задач возможно оспользование уже
Создавая программу, целью которой является решение элементарных задач возможно оспользование уже
Распределение обязанностей
Стратегический уровень системы (управления выполняет самые ресурсоемкие задачи: распознавание
Распределение обязанностей
Стратегический уровень системы (управления выполняет самые ресурсоемкие задачи: распознавание
 Честь или участь
Честь или участь Птицы собираются в стаи
Птицы собираются в стаи Алгоритми
Алгоритми Проект технической эксплуатации механизма поворота роторного вагоноопрокидывателя в ЦПШ ПАО ЧМК
Проект технической эксплуатации механизма поворота роторного вагоноопрокидывателя в ЦПШ ПАО ЧМК Открытие дополнительных видов деятельности АО ПУЛ транс
Открытие дополнительных видов деятельности АО ПУЛ транс Профессиональная деятельность в легкой и пищевой промышленности
Профессиональная деятельность в легкой и пищевой промышленности Раздел II неопределенный интеграл лекция 1
Раздел II неопределенный интеграл лекция 1 Зерноуборочный комбайн КЗС-3219КР пропускной способностью 13 кг/с
Зерноуборочный комбайн КЗС-3219КР пропускной способностью 13 кг/с Pocahontas
Pocahontas donbass_batyanya_batyanya_donbass
donbass_batyanya_batyanya_donbass Робот манипулятор
Робот манипулятор Обучалка отопление 2 (1)
Обучалка отопление 2 (1) Значение компьютера в жизни современного человека
Значение компьютера в жизни современного человека Актирование аппаратов MEIZU
Актирование аппаратов MEIZU Основные понятия и определения делопроизводства
Основные понятия и определения делопроизводства 20140410_uroki_dobra
20140410_uroki_dobra 20130116_musorgskiy
20130116_musorgskiy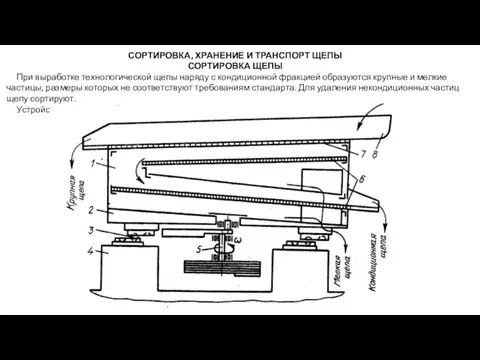 Сортировка, хранение и транспорт щепы
Сортировка, хранение и транспорт щепы ООО Газоучет. Программа обучения. Должность: монтажник
ООО Газоучет. Программа обучения. Должность: монтажник Ремонт проезжей части улицы Свободы от ул. Советская до пер. Безымянный, пгт Вахруши
Ремонт проезжей части улицы Свободы от ул. Советская до пер. Безымянный, пгт Вахруши СВАРНЫЕ СОЕДИНЕНИЯ
СВАРНЫЕ СОЕДИНЕНИЯ ООО МАТТОНЕ. Продукция
ООО МАТТОНЕ. Продукция Критерии качества перевода. Тема 4. Основные требования к переводу
Критерии качества перевода. Тема 4. Основные требования к переводу Компрессоры серии DMD 400-1000
Компрессоры серии DMD 400-1000 Меры по обеспечению безопасности при ГНВП
Меры по обеспечению безопасности при ГНВП У океана на ладони
У океана на ладони PET-преобразователь
PET-преобразователь Біблія як основа двох релігій – юдейської та християнської
Біблія як основа двох релігій – юдейської та християнської