- Электропривод промышленных механизмов. Электрооборудование кранов

Содержание
- 2. Асинхронный двигатель с короткозамкнутым ротором. Механические характеристики АДК Механические характеристики двухскоростного АДК
- 3. Асинхронный двигатель с короткозамкнутым ротором. Механические характеристики АДК с ТРН Механические характеристики АДК с ПЧ
- 4. Асинхронный двигатель с фазным ротором. Механические характеристики АДФ Характеристики асинхронного двигателя при широтно-импульсном регулировании сопротивления цепи
- 5. Двигатель постоянного тока независимого возбуждения Механические характеристики двигателя постоянного тока независимого возбуждения
- 6. Двигатель постоянного тока последовательного возбуждения Механические характеристики двигателя постоянного тока последоватльного возбуждения
- 7. Система генератор-двигатель (Г-Д)
- 8. Система тиристорный преобразователь-двигатель (ТП-Д)
- 9. Синхронный двигатель Механические характеристики синхронного двигателя Блок-схема включения синхронного двигателя по схеме «вентильный двигатель» Блок-схема системы
- 10. Исполнение электродвигателей общепромышленных механизмов. Общепромышленные механизмы оснащаются электрическими машинами Нормального исполнения Крановыми двигателями Экскаваторными двигателями -специального
- 11. Исполнение электродвигателей общепромышленных механизмов. Таблица 2.1 − Рекомендации по выбору двигателей.
- 12. Электрооборудование кранов
- 13. Классификация кранов по режимам работы. Режимы работ всех кранов: I–Л (Е1) − лёгкий, II−С (Е2) −
- 14. РЕЖИМЫ РАБОТЫ КРАНА
- 15. Крановый подъемный электромагнит
- 16. Крановый токоподвод
- 17. Контроллеры
- 18. Схема защитной панели крана
- 19. Схема управления с помощью силового контроллера
- 20. Магнитные контроллеры Магнитные контроллеры (магнитная контактная панель) применяются на всех современных кранах с тяжёлым режимом работы.
- 21. Схема магнитного контроллера типа ТА механизма перемещения моста крана
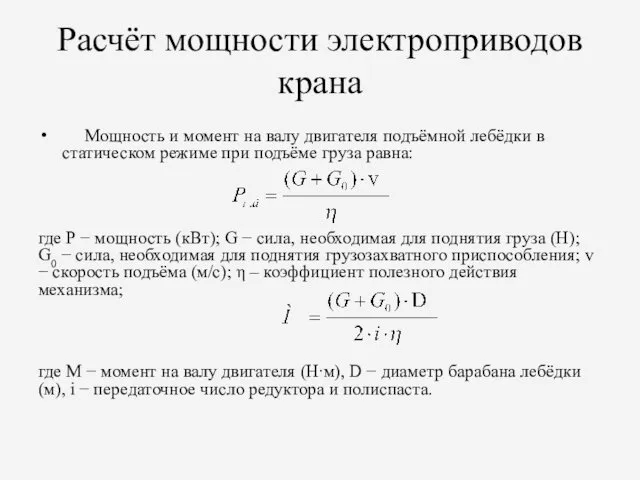
- 22. Расчёт мощности электроприводов крана Мощность и момент на валу двигателя подъёмной лебёдки в статическом режиме при
- 23. Мощность и момент на валу двигателя механизма горизонтального перемещения (мост, тележка) в статическом режиме равны: где:
- 25. Скачать презентацию
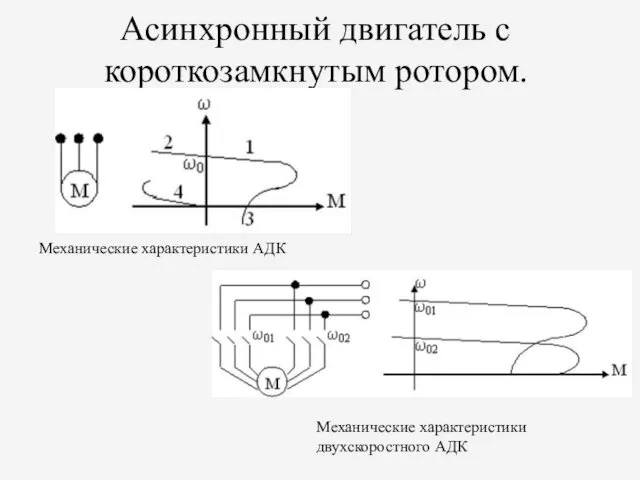
Асинхронный двигатель с короткозамкнутым ротором.
Механические характеристики АДК
Механические характеристики двухскоростного АДК
Асинхронный двигатель с короткозамкнутым ротором.
Механические характеристики АДК
Механические характеристики двухскоростного АДК
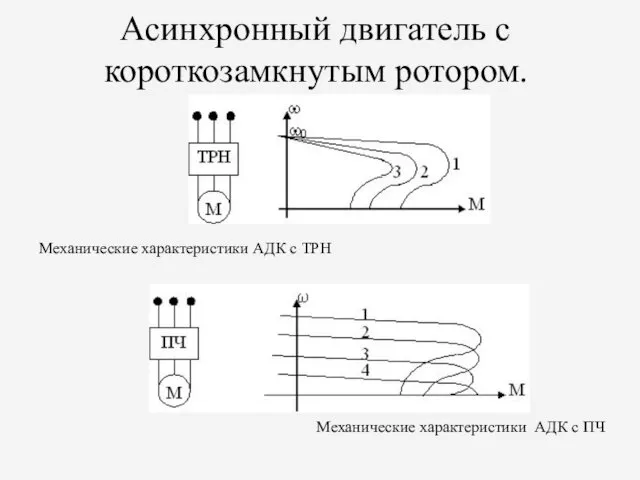
Асинхронный двигатель с короткозамкнутым ротором.
Механические характеристики АДК с ТРН
Механические характеристики АДК
Асинхронный двигатель с короткозамкнутым ротором.
Механические характеристики АДК с ТРН
Механические характеристики АДК
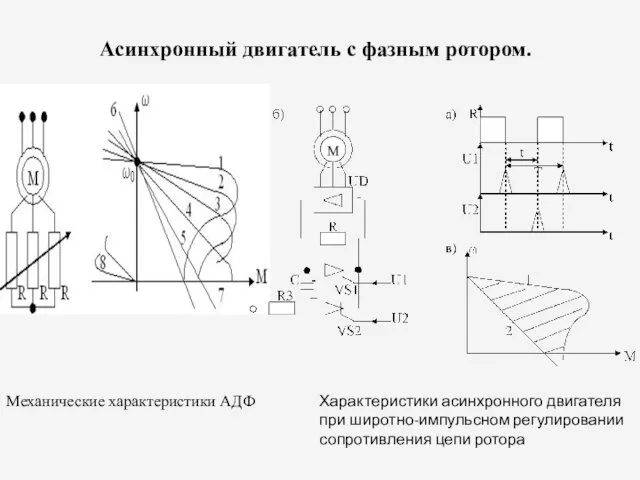
Асинхронный двигатель с фазным ротором.
Механические характеристики АДФ
Характеристики асинхронного двигателя при
Асинхронный двигатель с фазным ротором.
Механические характеристики АДФ
Характеристики асинхронного двигателя при
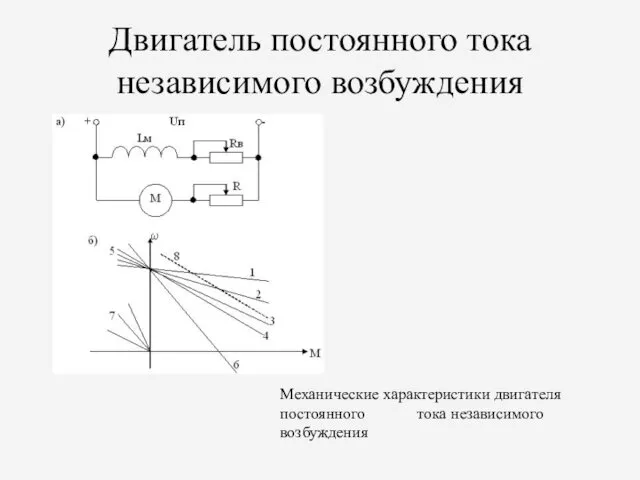
Двигатель постоянного тока независимого возбуждения
Механические характеристики двигателя постоянного тока независимого возбуждения
Двигатель постоянного тока независимого возбуждения
Механические характеристики двигателя постоянного тока независимого возбуждения
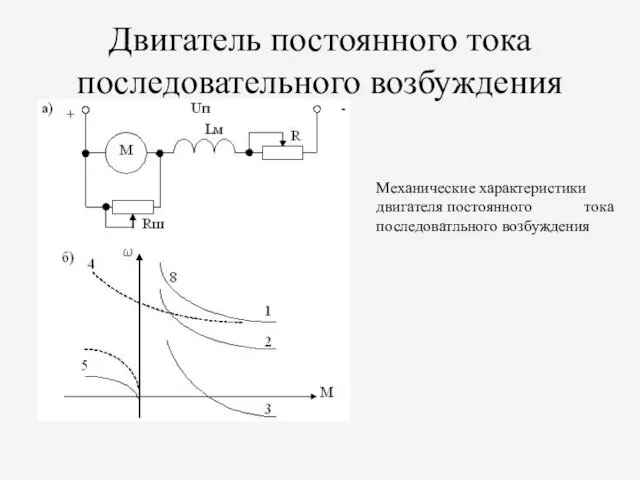
Двигатель постоянного тока последовательного возбуждения
Механические характеристики двигателя постоянного тока последоватльного возбуждения
Двигатель постоянного тока последовательного возбуждения
Механические характеристики двигателя постоянного тока последоватльного возбуждения
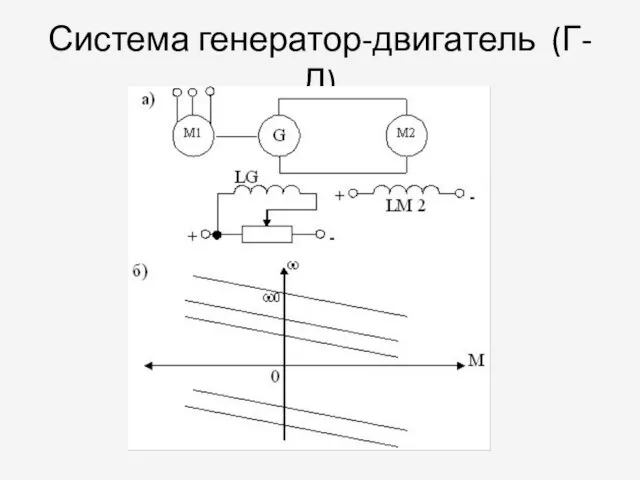
Система генератор-двигатель (Г-Д)
Система генератор-двигатель (Г-Д)
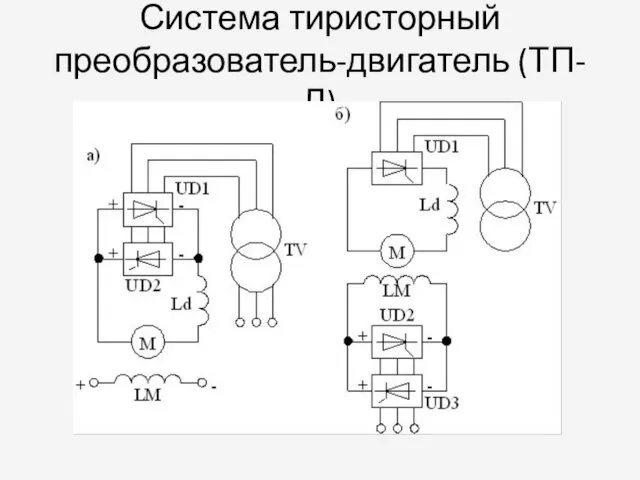
Система тиристорный преобразователь-двигатель (ТП-Д)
Система тиристорный преобразователь-двигатель (ТП-Д)
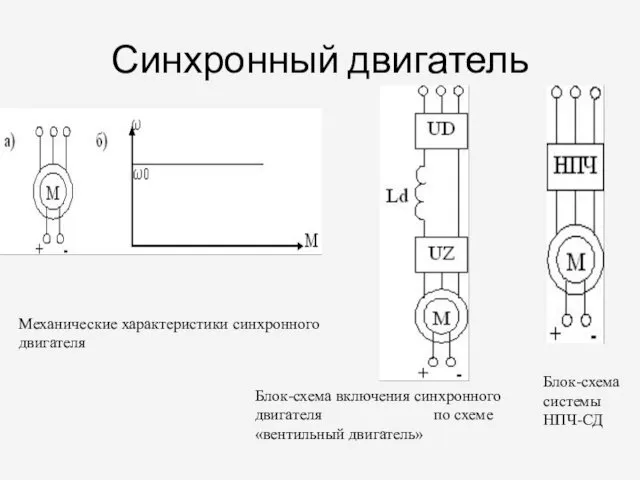
Синхронный двигатель
Механические характеристики синхронного двигателя
Блок-схема включения синхронного двигателя по схеме
Синхронный двигатель
Механические характеристики синхронного двигателя
Блок-схема включения синхронного двигателя по схеме
Исполнение электродвигателей общепромышленных механизмов.
Общепромышленные механизмы оснащаются электрическими машинами
Нормального исполнения
Крановыми двигателями
Экскаваторными
Исполнение электродвигателей общепромышленных механизмов.
Общепромышленные механизмы оснащаются электрическими машинами
Нормального исполнения
Крановыми двигателями
Экскаваторными
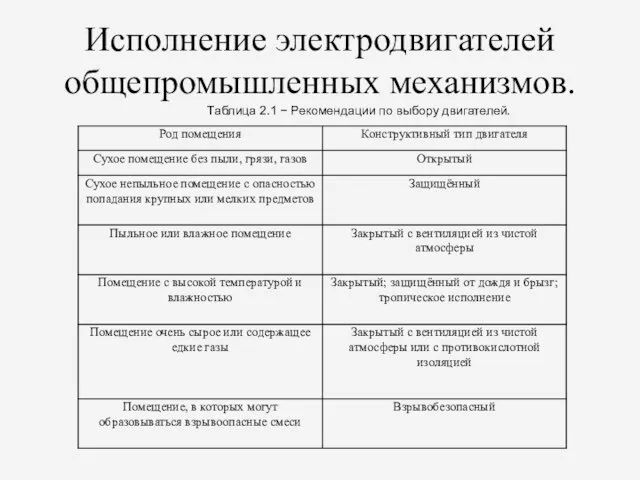
Исполнение электродвигателей общепромышленных механизмов.
Таблица 2.1 − Рекомендации по выбору двигателей.
Исполнение электродвигателей общепромышленных механизмов.
Таблица 2.1 − Рекомендации по выбору двигателей.
Электрооборудование кранов
Электрооборудование кранов
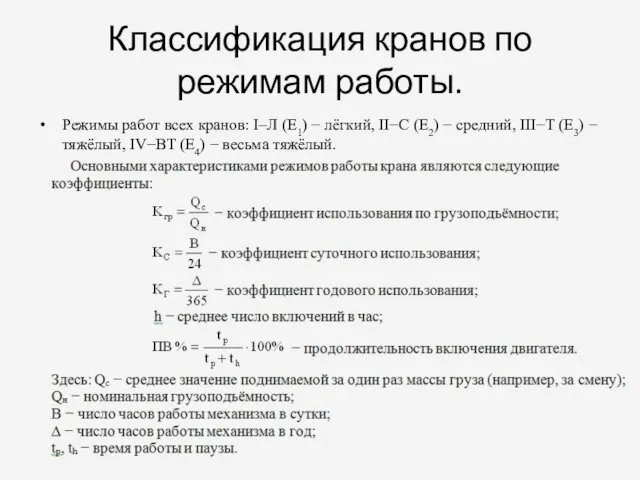
Классификация кранов по режимам работы.
Режимы работ всех кранов: I–Л (Е1) −
Классификация кранов по режимам работы.
Режимы работ всех кранов: I–Л (Е1) −
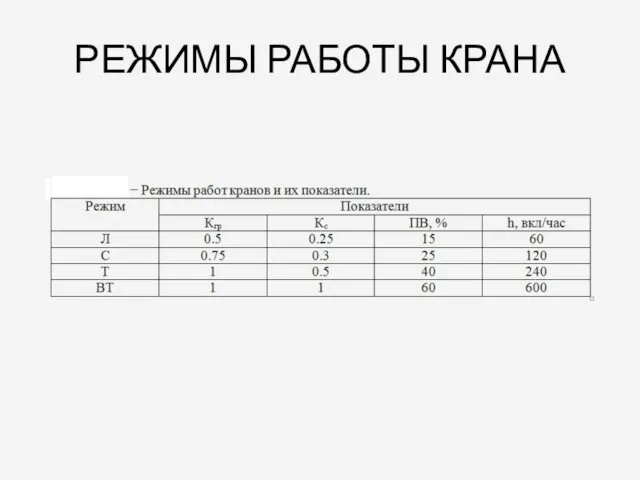
РЕЖИМЫ РАБОТЫ КРАНА
РЕЖИМЫ РАБОТЫ КРАНА

Крановый подъемный электромагнит
Крановый подъемный электромагнит

Крановый токоподвод
Крановый токоподвод
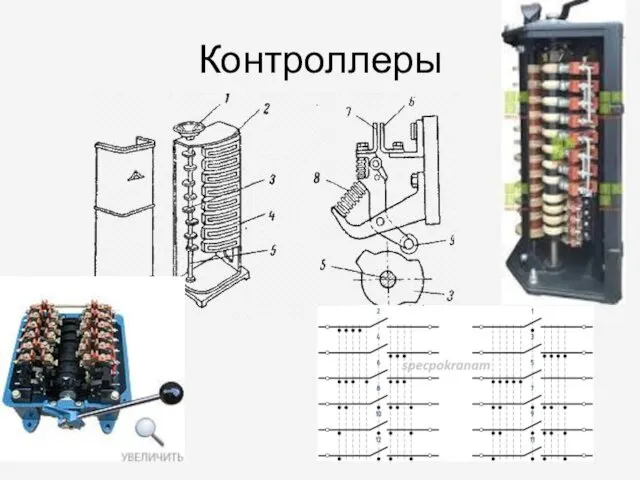
Контроллеры
Контроллеры
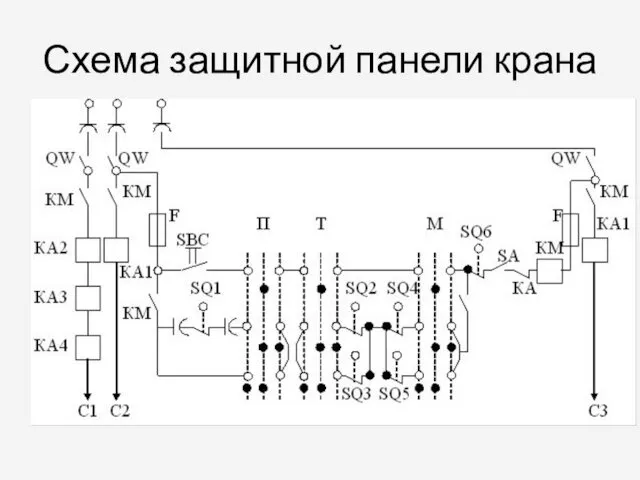
Схема защитной панели крана
Схема защитной панели крана
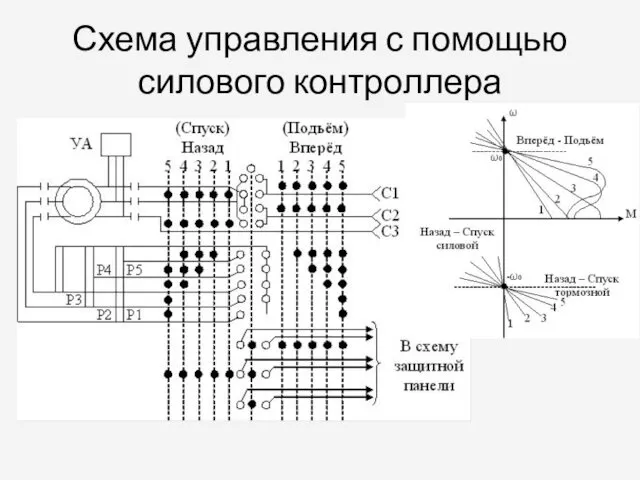
Схема управления с помощью силового контроллера
Схема управления с помощью силового контроллера
Магнитные контроллеры
Магнитные контроллеры (магнитная контактная панель) применяются на всех современных
Магнитные контроллеры
Магнитные контроллеры (магнитная контактная панель) применяются на всех современных

Схема магнитного контроллера типа ТА механизма перемещения моста крана
Схема магнитного контроллера типа ТА механизма перемещения моста крана
Расчёт мощности электроприводов крана
Мощность и момент на валу двигателя подъёмной
Расчёт мощности электроприводов крана
Мощность и момент на валу двигателя подъёмной
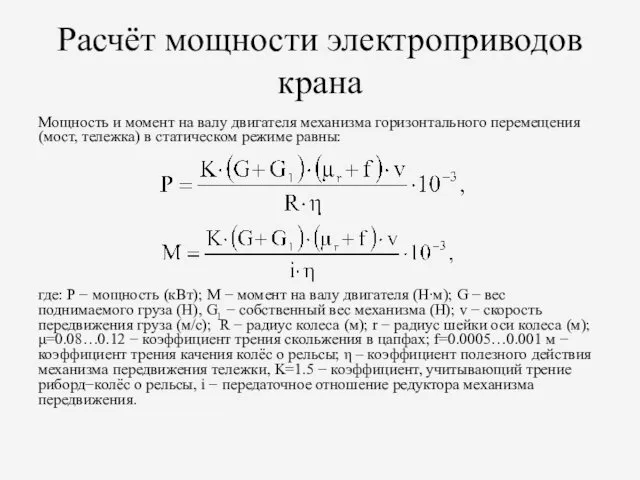
Мощность и момент на валу двигателя механизма горизонтального перемещения (мост, тележка)
Мощность и момент на валу двигателя механизма горизонтального перемещения (мост, тележка)
 Motorola solutions learning. Network application interface (NAI). Radio management (RM)
Motorola solutions learning. Network application interface (NAI). Radio management (RM) Дистанционное занятие Попади в цель
Дистанционное занятие Попади в цель Басня
Басня Информ безопасность
Информ безопасность Чарівні свята новорічні. Шкільна бібліотека
Чарівні свята новорічні. Шкільна бібліотека Ультразвуковой тестер материалов Пульсар-1.0. Основные технические характеристики. (Тема 5)
Ультразвуковой тестер материалов Пульсар-1.0. Основные технические характеристики. (Тема 5) Инструкция для родителей
Инструкция для родителей Гидроэлектростанция (ГЭС)
Гидроэлектростанция (ГЭС) Защитное и функциональное заземления. Основная и дополнительная системы уравнивания потенциалов
Защитное и функциональное заземления. Основная и дополнительная системы уравнивания потенциалов 20151019_svoya_igra
20151019_svoya_igra объединение мастерская рукодепли я
объединение мастерская рукодепли я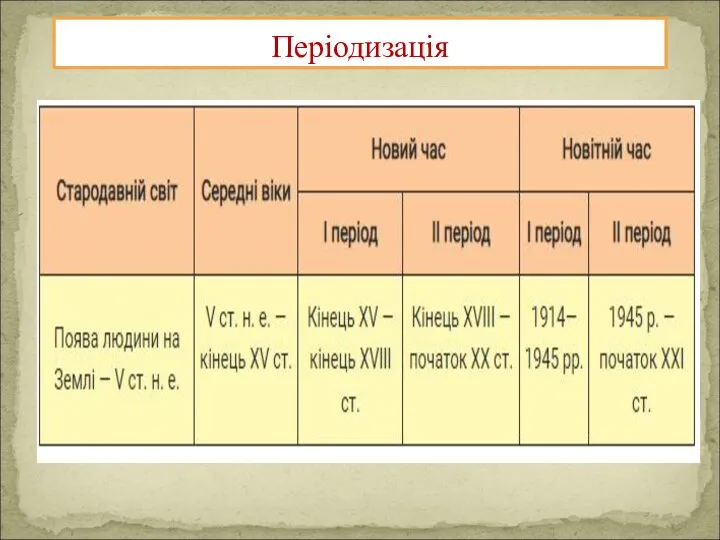 8 кл.всесвітня історія
8 кл.всесвітня історія Лекция 6. Типы, циклы в VHDL. Оператор Generate. Драйвера с тремя состояниями
Лекция 6. Типы, циклы в VHDL. Оператор Generate. Драйвера с тремя состояниями Определение потребности в кормах для свиноводства
Определение потребности в кормах для свиноводства Сварка оптического волокна
Сварка оптического волокна Что такое джаз-танец?
Что такое джаз-танец? 20120330_kolchak_i_timiryova
20120330_kolchak_i_timiryova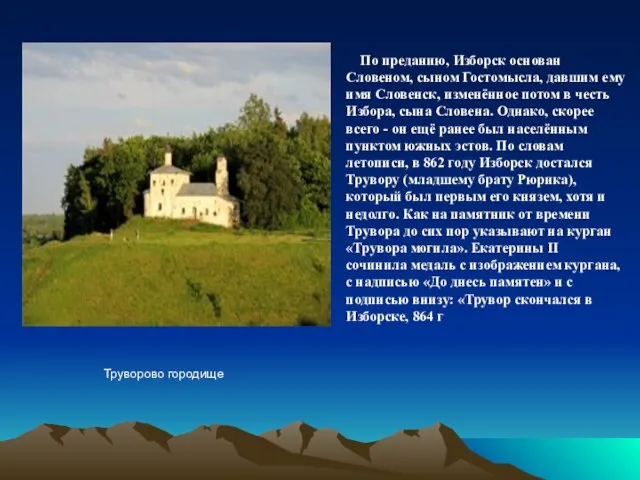 20130504_izborsk
20130504_izborsk tseli_ustoychivogo_razvitia
tseli_ustoychivogo_razvitia Устный журнал 7ямоя радость
Устный журнал 7ямоя радость 20160417_22_mirovoe_hozyaystvo
20160417_22_mirovoe_hozyaystvo Управление церковью
Управление церковью Искусство начала 18 века. Гзель, Вишняков
Искусство начала 18 века. Гзель, Вишняков Р 5 Т 5.2 Программные средства телекоммуникаций_ 14
Р 5 Т 5.2 Программные средства телекоммуникаций_ 14 20180126_deti_s_oop
20180126_deti_s_oop Задачи на совместную работу
Задачи на совместную работу Система электроснабжения каналов транспортировки заряженных частиц ускорительного комплекса ЛФВЭ
Система электроснабжения каналов транспортировки заряженных частиц ускорительного комплекса ЛФВЭ Разновидности рубанков и их применение
Разновидности рубанков и их применение