- Назначение, конструкция, основные технические данные, принцип работы агрегатов САУ-451-03

Содержание
- 2. Тема №16: Системы автоматизированного и автоматического управления Занятие №5: Назначение, конструкция, основные технические данные, принцип работы
- 3. 1. Датчики информации. 2. Устройство индикации и управления. 3. Вычислительно-преобразующие и исполнительные устройства САУ. Вопросы занятия:
- 4. Вопрос № 1: Датчики информации
- 5. ДУСУ - датчики угловых скоростей унифицированные. Измеряют угловые скорости ωx, ωy, ωz и выдают пропорциональные электрические
- 6. 3. ИКД-27ДА, ИКД-27ДФ - измерительные комплексы давлений. Предназначены для измерения статического и полного давлений и выдачи
- 7. ДПР-23 - датчик положения ручки управления самолетом (РУС). Предназначен для выдачи в САУ электросигнала пропорционального поперечному
- 8. МУ-615 – датчик положения носков крыла. Предназначен для преобразования углов отклонения носков крыла в пропорциональные электросигналы
- 9. КВ-16 - корректор высоты. Предназначен для измерения отклонения барометрической высоты полета от заданной и выдачи электрического
- 10. Состав КВ-16: Герметичный корпус; Чувствительный элемент: анероидная коробка с термокомпенсатором первого рода; ПММ - передаточно-множительный механизм;
- 11. Характеристики: а) анероидной коробки; в) индукционного датчика; б) схема индукционного датчика Корректор высоты КВ -16
- 12. Вопрос № 2: Устройства индикации и управления
- 13. ПУ-189 - пульт управления. Предназначен для управления режимами работы САУ. На ПУ-189 расположены кнопки табло: «Демпфер»
- 14. КПП-СИ - командно-пилотажный прибор - предназначен для индикации пространственного положения самолета по крену и тангажу и
- 15. Электропитание: постоянным током с напряжением 27В ± 10%; переменным током с напряжением 36В, частота 400Гц Диапазон
- 16. ПНП-72 - прибор навигационный плановый. Предназначен для контроля положения самолета относительно заданной линии пути в горизонтальной
- 17. Вопрос №3: Вычислительно-преобразующие и исполнительные устройства САУ
- 18. ВУ-222-03 вычислитель управления. Предназначен для формирования сигналов управления и команд для исполнительных устройств в различных режимах
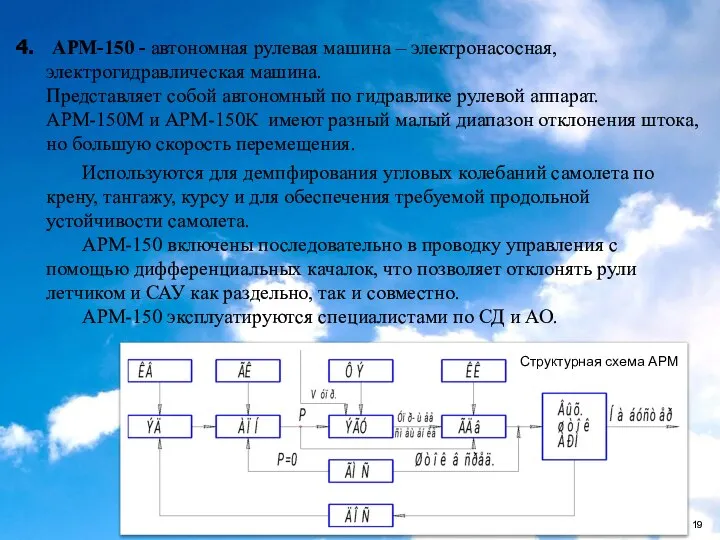
- 19. АРМ-150 - автономная рулевая машина – электронасосная, электрогидравлическая машина. Представляет собой автономный по гидравлике рулевой аппарат.
- 20. Состав АРМ-150: КВ – клапан включения - подключает АРМ в качестве исполнительного механизма САУ. ЭД –
- 21. Структурная схема АРМ При заправке жидкости АМГ-10 до Р=2,7·105 Па, поршень гидрокомпенсатора перемещается сжимая пружину. Магнит
- 24. Скачать презентацию
Тема №16:
Системы автоматизированного и автоматического управления
Занятие №5:
Назначение, конструкция, основные технические данные,
Тема №16:
Системы автоматизированного и автоматического управления
Занятие №5:
Назначение, конструкция, основные технические данные,
1. Датчики информации.
2. Устройство индикации и управления.
3. Вычислительно-преобразующие и
1. Датчики информации.
2. Устройство индикации и управления.
3. Вычислительно-преобразующие и
Вопрос № 1:
Датчики информации
Вопрос № 1:
Датчики информации

ДУСУ - датчики угловых скоростей унифицированные.
Измеряют угловые скорости ωx, ωy, ωz
ДУСУ - датчики угловых скоростей унифицированные.
Измеряют угловые скорости ωx, ωy, ωz
3. ИКД-27ДА, ИКД-27ДФ - измерительные комплексы
давлений.
Предназначены для измерения статического
3. ИКД-27ДА, ИКД-27ДФ - измерительные комплексы
давлений.
Предназначены для измерения статического
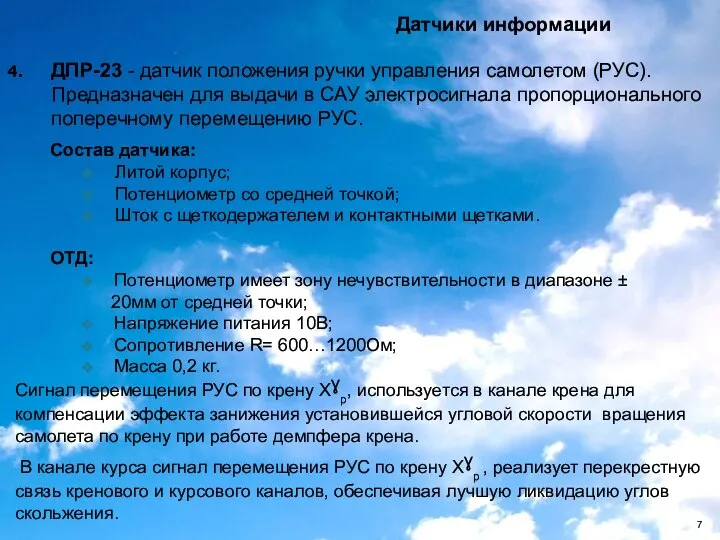
ДПР-23 - датчик положения ручки управления самолетом (РУС). Предназначен для выдачи
ДПР-23 - датчик положения ручки управления самолетом (РУС). Предназначен для выдачи
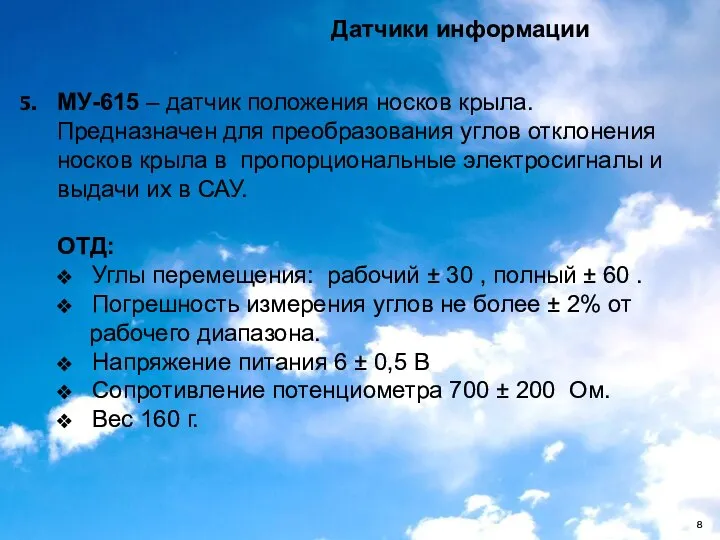
МУ-615 – датчик положения носков крыла.
Предназначен для преобразования углов отклонения
носков
МУ-615 – датчик положения носков крыла.
Предназначен для преобразования углов отклонения
носков
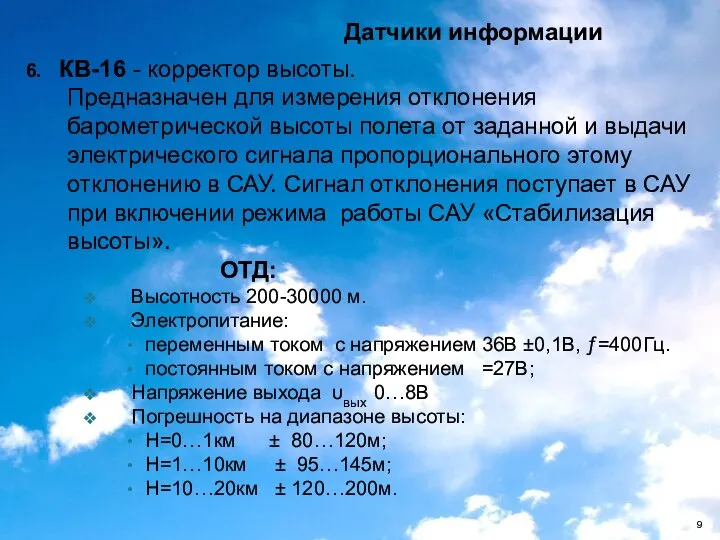
КВ-16 - корректор высоты.
Предназначен для измерения отклонения барометрической высоты полета от
КВ-16 - корректор высоты.
Предназначен для измерения отклонения барометрической высоты полета от

Состав КВ-16:
Герметичный корпус;
Чувствительный элемент: анероидная коробка с термокомпенсатором первого рода;
ПММ -
Состав КВ-16:
Герметичный корпус;
Чувствительный элемент: анероидная коробка с термокомпенсатором первого рода;
ПММ -
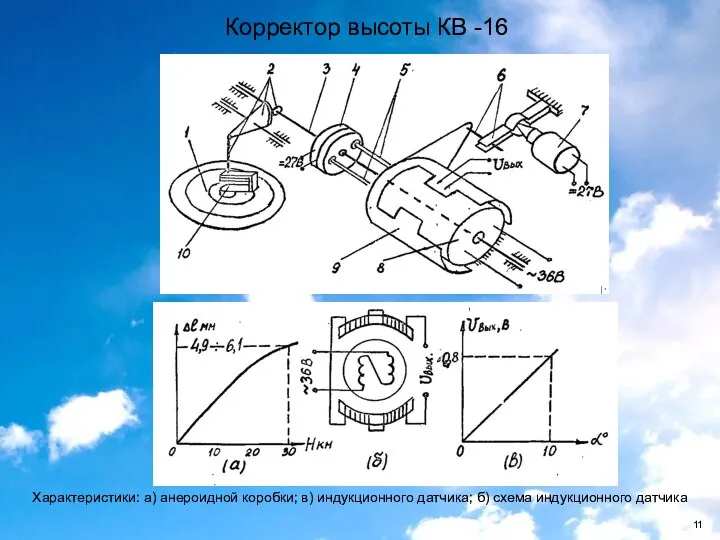
Характеристики: а) анероидной коробки; в) индукционного датчика; б) схема индукционного датчика
Корректор
Характеристики: а) анероидной коробки; в) индукционного датчика; б) схема индукционного датчика
Корректор
Вопрос № 2:
Устройства индикации и управления
Вопрос № 2:
Устройства индикации и управления
ПУ-189 - пульт управления.
Предназначен для управления режимами работы САУ.
На ПУ-189 расположены
ПУ-189 - пульт управления.
Предназначен для управления режимами работы САУ.
На ПУ-189 расположены

КПП-СИ - командно-пилотажный прибор - предназначен для индикации пространственного положения самолета
КПП-СИ - командно-пилотажный прибор - предназначен для индикации пространственного положения самолета
Электропитание:
постоянным током с напряжением 27В ± 10%;
переменным током с напряжением
постоянным током с напряжением 27В ± 10%;
переменным током с напряжением

ПНП-72 - прибор навигационный плановый.
Предназначен для контроля положения самолета относительно заданной
ПНП-72 - прибор навигационный плановый.
Предназначен для контроля положения самолета относительно заданной
Вопрос №3:
Вычислительно-преобразующие и исполнительные устройства САУ
Вопрос №3:
Вычислительно-преобразующие и исполнительные устройства САУ
ВУ-222-03 вычислитель управления.
Предназначен для формирования сигналов управления и команд для исполнительных
ВУ-222-03 вычислитель управления.
Предназначен для формирования сигналов управления и команд для исполнительных
АРМ-150 - автономная рулевая машина – электронасосная,
электрогидравлическая машина.
Представляет собой
АРМ-150 - автономная рулевая машина – электронасосная,
электрогидравлическая машина.
Представляет собой
Состав АРМ-150:
КВ – клапан включения - подключает АРМ в качестве исполнительного
Состав АРМ-150:
КВ – клапан включения - подключает АРМ в качестве исполнительного
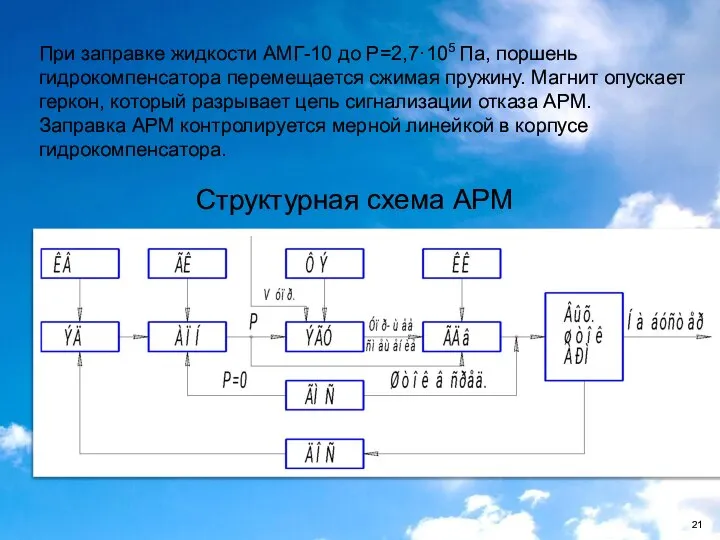
Структурная схема АРМ
При заправке жидкости АМГ-10 до Р=2,7·105 Па, поршень гидрокомпенсатора
Структурная схема АРМ
При заправке жидкости АМГ-10 до Р=2,7·105 Па, поршень гидрокомпенсатора

 _-_4_1_pptx
_-_4_1_pptx Математический турнир SAWA
Математический турнир SAWA Культура и религия Древнего мира
Культура и религия Древнего мира 04 Изделия из глины
04 Изделия из глины Поисково-краеведческий материал Донбасс – мой родной край
Поисково-краеведческий материал Донбасс – мой родной край Борьба с сердечно-сосудистыми заболеваниями
Борьба с сердечно-сосудистыми заболеваниями Художественная культура ислама
Художественная культура ислама Должностные обязанности юных железнодорожников
Должностные обязанности юных железнодорожников 6 февраля - Международный день протеста против нанесения увечий женским гениталиям
6 февраля - Международный день протеста против нанесения увечий женским гениталиям Покровные переплетные материалы
Покровные переплетные материалы Կառավարության Գնումների գործընթաց
Կառավարության Գնումների գործընթաց Реагентная обработка воды
Реагентная обработка воды 20150618_prezentatsiya_k_uroku_po_romanu_prestuplenie_i_nakazanie
20150618_prezentatsiya_k_uroku_po_romanu_prestuplenie_i_nakazanie Технологические режимы подготовки битумов
Технологические режимы подготовки битумов Территория детства
Территория детства Эфиопская (Абиссинская) православная церковь
Эфиопская (Абиссинская) православная церковь Внеурочная деятельность
Внеурочная деятельность Дерево из пластилина
Дерево из пластилина Панфилов Николай Степанович участник ВОВ
Панфилов Николай Степанович участник ВОВ Дополнительная общеобразовательная общеразвивающая программа Юный пешеход
Дополнительная общеобразовательная общеразвивающая программа Юный пешеход 20130218_dinasticheskiy_krizis_1825_g
20130218_dinasticheskiy_krizis_1825_g Моя будущая профессия. Электроэнергетика и электротехника
Моя будущая профессия. Электроэнергетика и электротехника Производство электрической энергии на электрических станциях различного типа. (Лекция 2)
Производство электрической энергии на электрических станциях различного типа. (Лекция 2) Дидактическая игра Найди лишнее в мл.гр
Дидактическая игра Найди лишнее в мл.гр Классификация причин возникновения дефектного состояния строительных конструкций зданий и сооружений
Классификация причин возникновения дефектного состояния строительных конструкций зданий и сооружений Курсовой проект Технология ремонта лазерного принтера HP LaserJet 1020
Курсовой проект Технология ремонта лазерного принтера HP LaserJet 1020 Элементы прямоугольного сечения с двойной арматурой
Элементы прямоугольного сечения с двойной арматурой Traditional costumes of the British Isles
Traditional costumes of the British Isles