- Презентация_Бугаев

Содержание
- 2. Актуальность и цель работы Актуальность: Постоянное увеличение количества автовладельцев, следовательно, уменьшение свободных парковочных мест Экономия земельного
- 3. ВЫБОР МОДЕЛИ И ТЕХНИЧЕСКОЕ ОПИСАНИЕ башенного типа, основанного на вертикально-ориентированном перемещении автомобилей по принципу лифта (рисунок
- 4. Рисунок 1.1 – МАП башенного типа
- 5. Рисунок 1.2 – МАП роторного типа
- 6. Рисунок 1.3 – МАП пазлового типа
- 7. Паркинг роторного типа является самым дешёвым и быстрым в построении, но одновременно самым незащищённым и ненадёжным
- 8. Рисунок 1.4 – Паллетный вид паркинга В паллетных вариантах многоуровневых стоянок автомобиль перемещается при помощи специальных
- 9. Конструктивные особенности беспаллетного парнкинга позволяют уменьшить время обслуживания клиента, ведь перемещение автомобиля осуществляется не при помощи
- 10. Применение гидропривода в проектируемой системе Гидроприводом принято называть совокупность устройств, предназначенных для приведения в движение механизмов
- 11. Выбор исполнительных элементов гидропривода В проектируемой системе автоматического паркинга необхоимо управлять как прямым, так и обратным
- 12. В моделируемой системе присутствует этап вертикального перемещения подвижной конструкции подобно лифту. В данном виде работ широкое
- 13. Распределители В зависимости от запорно-регулирующего элемента распределители различают на золотниковые и клапанные. Клапанные обладают лучшей герметичностью.
- 14. Выбор модели автоматического паркинга с применением средств гидроавтоматики Пусть автомобиль заезжает на подвижную платформу. В целях
- 15. Рисунок 1.7 – Схема движения платформы
- 16. Рисунок 1.8 – Циклограмма процесса
- 17. Ранее мы говорили, что беспаллетный паркинг является более выгодным и простым вариантом. Пусть наша подвижная платформа
- 18. Предположим, водитель всё так же хочет запарковать свой автомобиль на втором ярусе и нажимает соответствующую кнопку.
- 19. Рисунок 1.11 – Модифицированная платформа
- 20. Временная циклограмма процесса парковки автомобиля на втором этаже обновлённой модели будет выглядеть следующим образом: Рисунок 1.12
- 22. Скачать презентацию
Актуальность и цель работы
Актуальность:
Постоянное увеличение количества автовладельцев, следовательно, уменьшение свободных парковочных
Актуальность и цель работы
Актуальность:
Постоянное увеличение количества автовладельцев, следовательно, уменьшение свободных парковочных
ВЫБОР МОДЕЛИ И ТЕХНИЧЕСКОЕ ОПИСАНИЕ
башенного типа, основанного на вертикально-ориентированном перемещении автомобилей
ВЫБОР МОДЕЛИ И ТЕХНИЧЕСКОЕ ОПИСАНИЕ
башенного типа, основанного на вертикально-ориентированном перемещении автомобилей
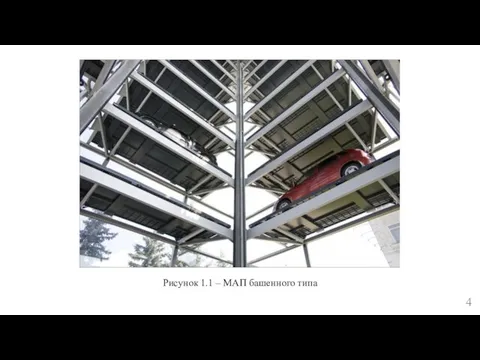
Рисунок 1.1 – МАП башенного типа
Рисунок 1.1 – МАП башенного типа

Рисунок 1.2 – МАП роторного типа
Рисунок 1.2 – МАП роторного типа

Рисунок 1.3 – МАП пазлового типа
Рисунок 1.3 – МАП пазлового типа
Паркинг роторного типа является самым дешёвым и быстрым в построении, но
Паркинг роторного типа является самым дешёвым и быстрым в построении, но

Рисунок 1.4 – Паллетный вид паркинга
В паллетных вариантах многоуровневых стоянок автомобиль
Рисунок 1.4 – Паллетный вид паркинга
В паллетных вариантах многоуровневых стоянок автомобиль

Конструктивные особенности беспаллетного парнкинга позволяют уменьшить время обслуживания клиента, ведь перемещение
Конструктивные особенности беспаллетного парнкинга позволяют уменьшить время обслуживания клиента, ведь перемещение
Применение гидропривода в проектируемой системе
Гидроприводом принято называть совокупность устройств, предназначенных для
Применение гидропривода в проектируемой системе
Гидроприводом принято называть совокупность устройств, предназначенных для
Выбор исполнительных элементов гидропривода
В проектируемой системе автоматического паркинга необхоимо управлять как
Выбор исполнительных элементов гидропривода
В проектируемой системе автоматического паркинга необхоимо управлять как

В моделируемой системе присутствует этап вертикального перемещения подвижной конструкции подобно лифту.
В моделируемой системе присутствует этап вертикального перемещения подвижной конструкции подобно лифту.
Распределители
В зависимости от запорно-регулирующего элемента распределители различают на золотниковые и клапанные.
Распределители
В зависимости от запорно-регулирующего элемента распределители различают на золотниковые и клапанные.
Выбор модели автоматического паркинга с применением средств гидроавтоматики
Пусть автомобиль заезжает на
Выбор модели автоматического паркинга с применением средств гидроавтоматики
Пусть автомобиль заезжает на
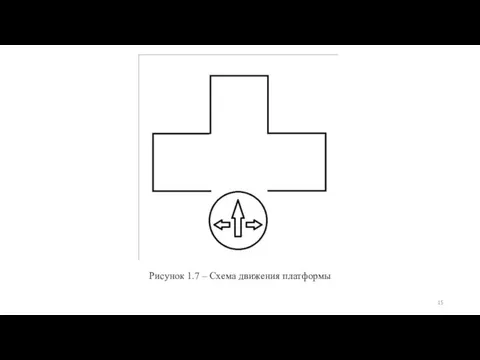
Рисунок 1.7 – Схема движения платформы
Рисунок 1.7 – Схема движения платформы
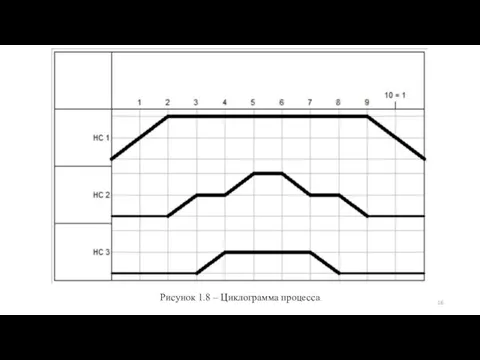
Рисунок 1.8 – Циклограмма процесса
Рисунок 1.8 – Циклограмма процесса
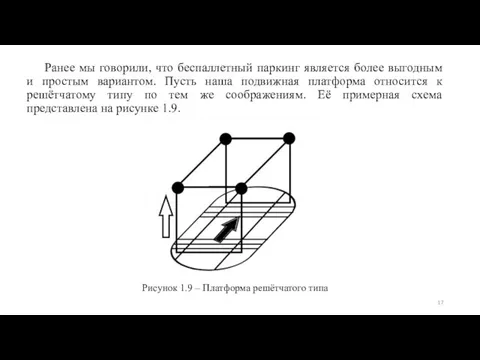
Ранее мы говорили, что беспаллетный паркинг является более выгодным и простым
Ранее мы говорили, что беспаллетный паркинг является более выгодным и простым
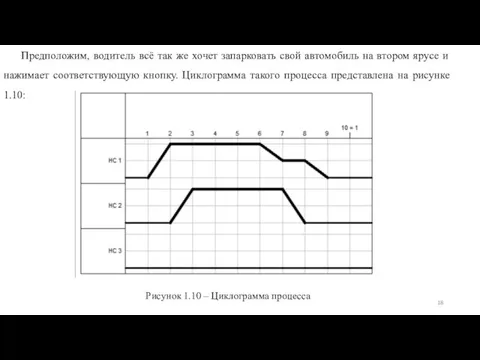
Предположим, водитель всё так же хочет запарковать свой автомобиль на втором
Предположим, водитель всё так же хочет запарковать свой автомобиль на втором
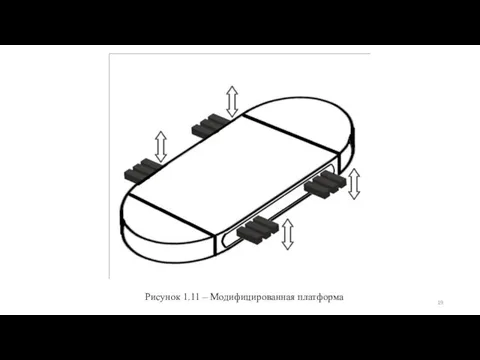
Рисунок 1.11 – Модифицированная платформа
Рисунок 1.11 – Модифицированная платформа
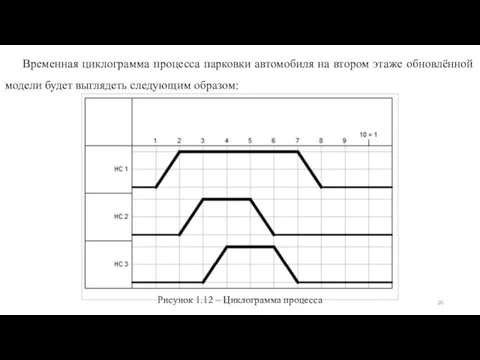
Временная циклограмма процесса парковки автомобиля на втором этаже обновлённой модели будет
Временная циклограмма процесса парковки автомобиля на втором этаже обновлённой модели будет
 О профессиях разных, нужных и важных
О профессиях разных, нужных и важных Говорить о вере честно
Говорить о вере честно Tajemnice Bolesne
Tajemnice Bolesne Способы соединения элементов в электрических цепях. Виды проводов
Способы соединения элементов в электрических цепях. Виды проводов [email protected]_2022-08-16_13-26-47
[email protected]_2022-08-16_13-26-47 класс_1_урок
класс_1_урок Международный день защиты информации
Международный день защиты информации BrainШтурм. Игра №2
BrainШтурм. Игра №2 лицом к лицу. Задание
лицом к лицу. Задание Электронагревательные приборы
Электронагревательные приборы Introductions to positioning access points
Introductions to positioning access points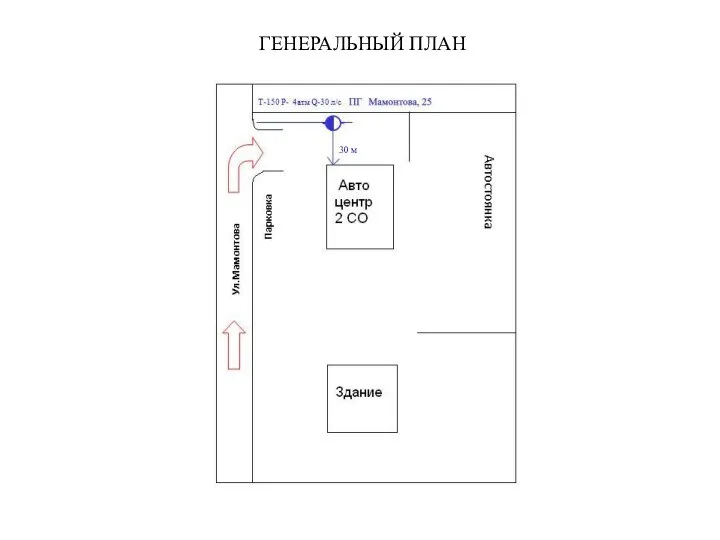 Автосервис Рено. Генеральный план
Автосервис Рено. Генеральный план Основы технологии отделочных строительных работ
Основы технологии отделочных строительных работ Игорь Сергеевич Иванов
Игорь Сергеевич Иванов Испытание и контроль качества электрооборудования расчетной линии в схеме электроснабжения цеха нефтяного оборудования
Испытание и контроль качества электрооборудования расчетной линии в схеме электроснабжения цеха нефтяного оборудования ЗОЖ - лайфхаки для студентов
ЗОЖ - лайфхаки для студентов Миф о бэкапах
Миф о бэкапах МРТ анатомия головного мозга
МРТ анатомия головного мозга Разработка приложения для расчета импеданса симметричной полосковой линии передачи
Разработка приложения для расчета импеданса симметричной полосковой линии передачи 20120514_trafalgar
20120514_trafalgar Фильтр Калмана
Фильтр Калмана Моя Родина - Яранск
Моя Родина - Яранск Моя деревня Старобирючево. Фотоальбом
Моя деревня Старобирючево. Фотоальбом Обеспечение безопасности при неблагоприятной экологической обстановке и при эпидемии
Обеспечение безопасности при неблагоприятной экологической обстановке и при эпидемии Бабочки. Вставь букву б или д
Бабочки. Вставь букву б или д 20140111_test_pdd_1
20140111_test_pdd_1 20120417_otkuda_poshli_nazvaniya_ulic_rodnoy_stanicy
20120417_otkuda_poshli_nazvaniya_ulic_rodnoy_stanicy 20170822_prezentatsiya_rossiyskie_profsoyuzy_istoriya_i_sovremennost
20170822_prezentatsiya_rossiyskie_profsoyuzy_istoriya_i_sovremennost