- Создание робота на плате Iskra JS, который управляется с помощью ИК-пульта

Содержание
- 2. Цели и задачи проекта Цель: Создание робота на плате Iskra JS , который управляется с помощью
- 3. Плата Iskra JS Iskra JS — это маленький компьютер, мозг нашей Робоняши. Он умеет измерять напряжение,
- 4. Работа двигателей Крепим колёса к моторам, которые заставят двигаться нашего робота. Для работы нам понадобится микромотор
- 5. Плата Motor Shield Плата позволяет управлять скоростью и направлением вращения мотора с помощью логических сигналов микроконтроллера.
- 6. Сборка робота
- 7. Структор
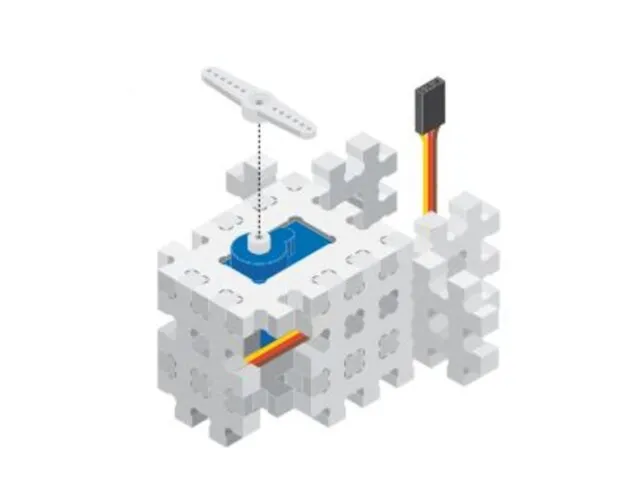
- 8. Поворот головы Для этого нам потребуется двигатель, но обычные двигатели вращаются непрерывно с заданной скоростью. Для
- 10. Программа для управления роботом Ни один робот не работает без внутренней программы. Программу для нашей Робоняши
- 11. Основные компоненты Робоняши, и соответствующие им программы Дадим всем знать о приближении робота. Установим на ушке
- 12. Поворот головы
- 13. Будем управлять с помощью пульта на инфракрасных лучах. Точь-в-точь как телевизор или кондиционер. Пульт ИК при
- 14. Полная программа для управления роботом с помощью пульта
- 15. Наша Робоняша ♥
- 16. Выводы В данном проекте мы закрепили свои знания в области конструирования Arduino. Научились управлять моторами, изучили
- 18. Скачать презентацию
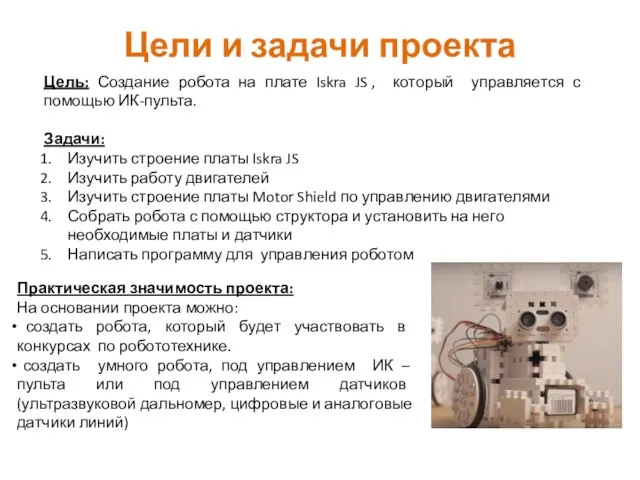
Цели и задачи проекта
Цель: Создание робота на плате Iskra JS , который
Цели и задачи проекта
Цель: Создание робота на плате Iskra JS , который
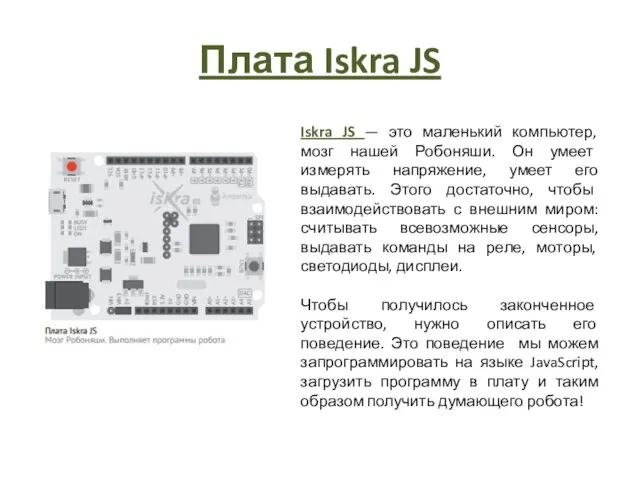
Плата Iskra JS
Iskra JS — это маленький компьютер, мозг нашей Робоняши.
Плата Iskra JS
Iskra JS — это маленький компьютер, мозг нашей Робоняши.

Работа двигателей
Крепим колёса к моторам, которые заставят двигаться нашего робота.
Для работы
Работа двигателей
Крепим колёса к моторам, которые заставят двигаться нашего робота.
Для работы

Плата Motor Shield
Плата позволяет управлять скоростью и направлением вращения мотора с
Плата Motor Shield
Плата позволяет управлять скоростью и направлением вращения мотора с

Сборка робота
Сборка робота
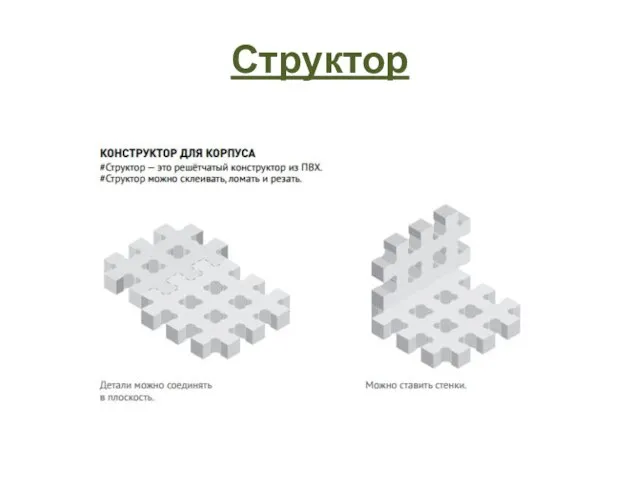
Структор
Структор
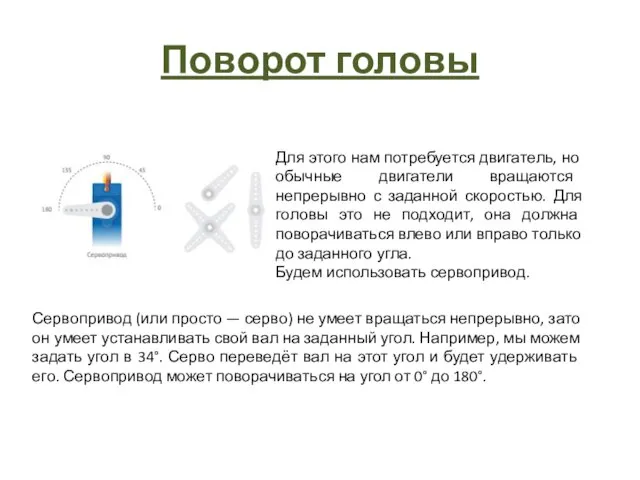
Поворот головы
Для этого нам потребуется двигатель, но обычные двигатели вращаются непрерывно
Поворот головы
Для этого нам потребуется двигатель, но обычные двигатели вращаются непрерывно
Программа для управления роботом
Ни один робот не работает без внутренней программы.
Программа для управления роботом
Ни один робот не работает без внутренней программы.
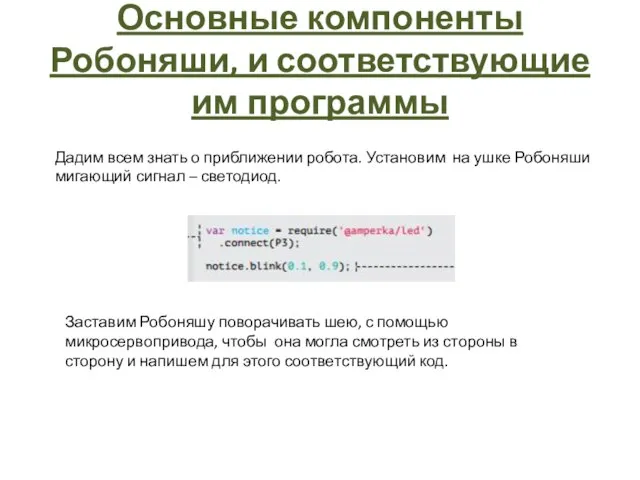
Основные компоненты Робоняши, и соответствующие им программы
Дадим всем знать о приближении
Основные компоненты Робоняши, и соответствующие им программы
Дадим всем знать о приближении
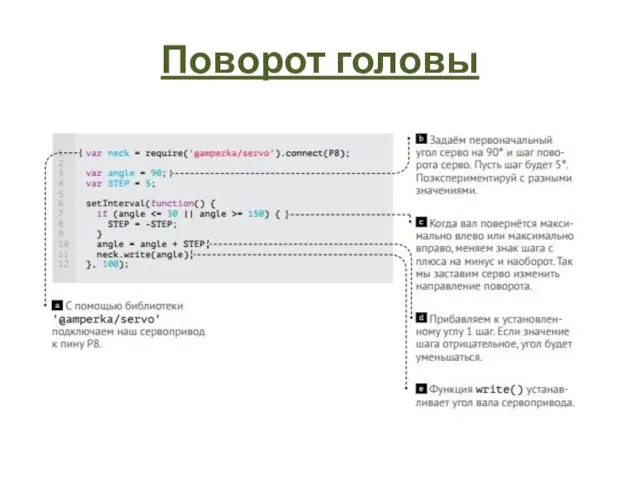
Поворот головы
Поворот головы

Будем управлять с помощью пульта на инфракрасных лучах. Точь-в-точь как телевизор
Будем управлять с помощью пульта на инфракрасных лучах. Точь-в-точь как телевизор

Полная программа для управления роботом с помощью пульта
Полная программа для управления роботом с помощью пульта

Наша
Робоняша ♥
Наша
Робоняша ♥
Выводы
В данном проекте мы закрепили свои знания в области конструирования Arduino.
Выводы
В данном проекте мы закрепили свои знания в области конструирования Arduino.
Похожие презентации
 Осциллографическая приставка к VGA-монитору
Осциллографическая приставка к VGA-монитору phoneticdrill
phoneticdrill Разновидности систем водяного отопления
Разновидности систем водяного отопления Япония: синто и буддизм
Япония: синто и буддизм Глоссарий головных уборов. Буква Г
Глоссарий головных уборов. Буква Г Христианская церковь Дом горшечника
Христианская церковь Дом горшечника Викторина к образованию Волжского района
Викторина к образованию Волжского района Основы мировых религиозных культур
Основы мировых религиозных культур Техническое обслуживание и ремонт автоматического выключателя серий АВМ-15СВ
Техническое обслуживание и ремонт автоматического выключателя серий АВМ-15СВ
 Групповое логопедическое занятие на тему: Звук [о], буква О
Групповое логопедическое занятие на тему: Звук [о], буква О Моргунова О. В. - Лекция 1
Моргунова О. В. - Лекция 1 15
15 ООО СИБУР
ООО СИБУР Растительный и животный мир. Крым
Растительный и животный мир. Крым Сто к одному
Сто к одному Пленительная красота
Пленительная красота Геология нефти и газа. Занятие 3
Геология нефти и газа. Занятие 3 Портфолио Аверина Виталия Владимировича
Портфолио Аверина Виталия Владимировича Tema_1_2022_Problemy_sovremennogo_razvitia_subbota
Tema_1_2022_Problemy_sovremennogo_razvitia_subbota Генерация электрической энергии. Образцы оформления слайдов
Генерация электрической энергии. Образцы оформления слайдов Разработка вариантов строительства ВОЛС на участке Гагарин - Можайск
Разработка вариантов строительства ВОЛС на участке Гагарин - Можайск Программирование Адресной системы
Программирование Адресной системы Наш сызранский помидор
Наш сызранский помидор 20160116_desyatichnye_drobi
20160116_desyatichnye_drobi ПРАВИЛА ИГРОВОГО ЦИКЛА
ПРАВИЛА ИГРОВОГО ЦИКЛА Производство, передача и потребление электрической энергии
Производство, передача и потребление электрической энергии Лучший сельский музей
Лучший сельский музей