- Цифровые системы управления

Содержание
- 2. © К. Поляков, 2003 ЦИФРОВЫЕ СИСТЕМЫ УПРАВЛЕНИЯ Структуры и особенности цифровых систем управления Квантование сигналов и
- 3. © К. Поляков, 2003 Литература Острём К., Виттенмарк Б. Системы управления с ЭВМ, М.: Мир, 1987.
- 4. © К. Поляков, 2003 Дополнительная литература Цыпкин Я.З., Теория импульсных систем, М.: Физматгиз, 1963. Джури Э.,
- 5. © К. Поляков, 2003 Поддержка курса http://kpolyakov.narod.ru http://kpolyakov.by.ru слайды к лекциям в формате PPT (для Power
- 6. © К. Поляков, 2003 Цифровые системы управления компьютер процесс Задающие воздействия Сигналы управления Управляемые величины компьютер
- 7. © К. Поляков, 2003 Компьютер в контуре управления АЦП ЦАП ПРОГРАММА Аналоговые (непрерывные сигналы) Дискретные сигналы
- 8. © К. Поляков, 2003 Квантование квантование по времени (с периодом T) квантование по уровню (8-12 бит)
- 9. © К. Поляков, 2003 Идеальный импульсный элемент T ×
- 10. © К. Поляков, 2003 Преобразование Лапласа для x*(t) Преобразование Лапласа для x*(t) Импульсный сигнал
- 11. © К. Поляков, 2003 Частота квантования Свойство периодичности целое Периодичность X*(s) с периодом j ωs
- 12. © К. Поляков, 2003 Частотные свойства при квантовании Преобразование Фурье для x(t) Связь спектров непрерывного и
- 13. © К. Поляков, 2003 Точное восстановление сигнала Непрерывный сигнал Дискретный сигнал Условие восстановления Частота Найквиста
- 14. © К. Поляков, 2003 Теорема Котельникова-Шеннона Непрерывный сигнал, преобразование Фурье которого равно нулю вне интервала (-ω0,
- 15. © К. Поляков, 2003 Эффект поглощения частот Дискретный сигнал Сигнал восстановить нельзя: Непрерывный сигнал
- 16. © К. Поляков, 2003 Эффект поглощения частот Частота поглощает частоты сек рад/сек Гц рад/сек Гц
- 17. © К. Поляков, 2003 Чем плохо поглощение частоты? спектры реальных сигналов не равны нулю при высокочастотные
- 18. © К. Поляков, 2003 Описание работы компьютера ПРОГРАММА Алгоритм обработки сигнала
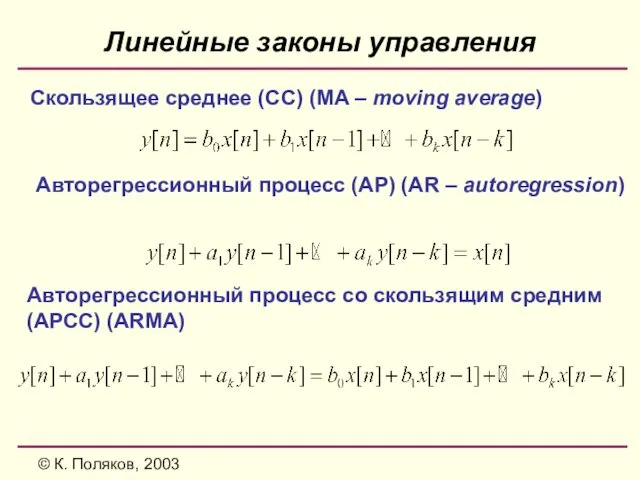
- 19. © К. Поляков, 2003 Линейные законы управления Скользящее среднее (СС) (MA – moving average) Авторегрессионный процесс
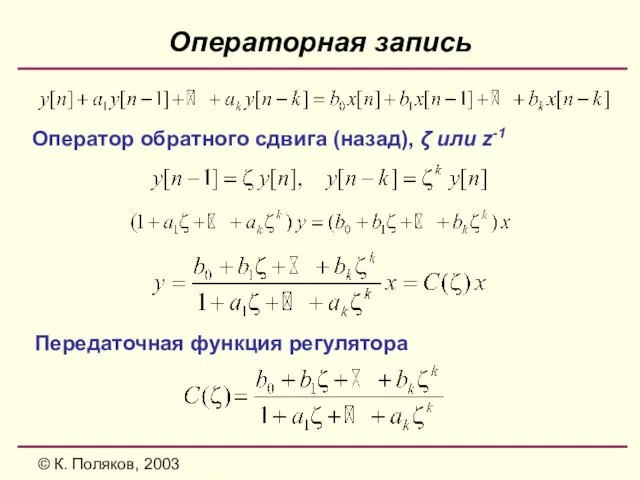
- 20. © К. Поляков, 2003 Операторная запись Оператор обратного сдвига (назад), ζ или z-1 Передаточная функция регулятора
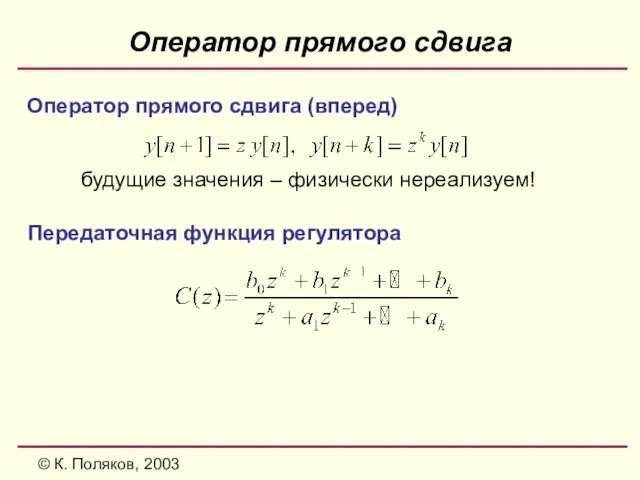
- 21. © К. Поляков, 2003 Оператор прямого сдвига Оператор прямого сдвига (вперед) будущие значения – физически нереализуем!
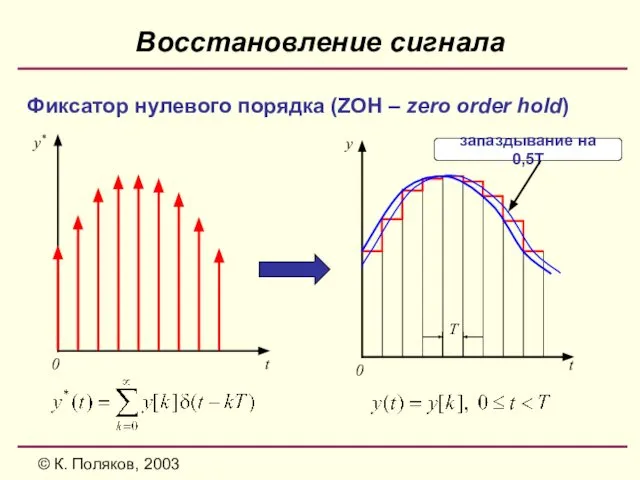
- 22. © К. Поляков, 2003 Восстановление сигнала Фиксатор нулевого порядка (ZOH – zero order hold) T 0
- 23. © К. Поляков, 2003 Фиксатор нулевого порядка Импульсная характеристика Передаточная функция 1 1 1 T
- 24. © К. Поляков, 2003 Фиксатор нулевого порядка Частотная характеристика
- 25. © К. Поляков, 2003 Экстраполятор первого порядка Передаточная функция 1 Импульсная характеристика
- 26. © К. Поляков, 2003 Экстраполятор первого порядка Частотная характеристика
- 27. © К. Поляков, 2003 Преимущества цифровых систем Стандартная аппаратура Нет дрейфа параметров Гибкость, легкость настройки Возможность
- 28. © К. Поляков, 2003 Недостатки цифровых систем Дискретизация сигналов приводит к потере точности Теряется информация о
- 30. Скачать презентацию
© К. Поляков, 2003
ЦИФРОВЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Структуры и особенности цифровых систем управления
Квантование
© К. Поляков, 2003
ЦИФРОВЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Структуры и особенности цифровых систем управления
Квантование
© К. Поляков, 2003
Литература
Острём К., Виттенмарк Б. Системы управления с ЭВМ,
© К. Поляков, 2003
Литература
Острём К., Виттенмарк Б. Системы управления с ЭВМ,
© К. Поляков, 2003
Дополнительная литература
Цыпкин Я.З., Теория импульсных систем, М.: Физматгиз,
© К. Поляков, 2003
Дополнительная литература
Цыпкин Я.З., Теория импульсных систем, М.: Физматгиз,
© К. Поляков, 2003
Поддержка курса
http://kpolyakov.narod.ru
http://kpolyakov.by.ru
слайды к лекциям в формате PPT (для
© К. Поляков, 2003
Поддержка курса
http://kpolyakov.narod.ru
http://kpolyakov.by.ru
слайды к лекциям в формате PPT (для
© К. Поляков, 2003
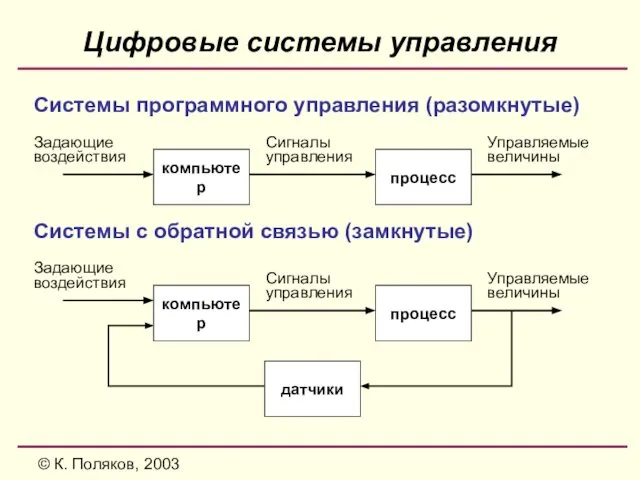
Цифровые системы управления
компьютер
процесс
Задающие
воздействия
Сигналы
управления
Управляемые
величины
компьютер
процесс
Задающие
воздействия
Сигналы
управления
Управляемые
величины
датчики
Системы с обратной связью (замкнутые)
Системы программного
© К. Поляков, 2003
Цифровые системы управления
компьютер
процесс
Задающие
воздействия
Сигналы
управления
Управляемые
величины
компьютер
процесс
Задающие
воздействия
Сигналы
управления
Управляемые
величины
датчики
Системы с обратной связью (замкнутые)
Системы программного
© К. Поляков, 2003
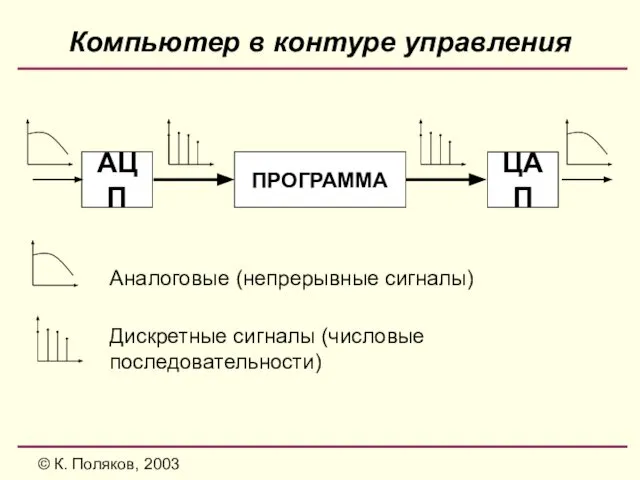
Компьютер в контуре управления
АЦП
ЦАП
ПРОГРАММА
Аналоговые (непрерывные сигналы)
Дискретные сигналы (числовые
© К. Поляков, 2003
Компьютер в контуре управления
АЦП
ЦАП
ПРОГРАММА
Аналоговые (непрерывные сигналы)
Дискретные сигналы (числовые
© К. Поляков, 2003
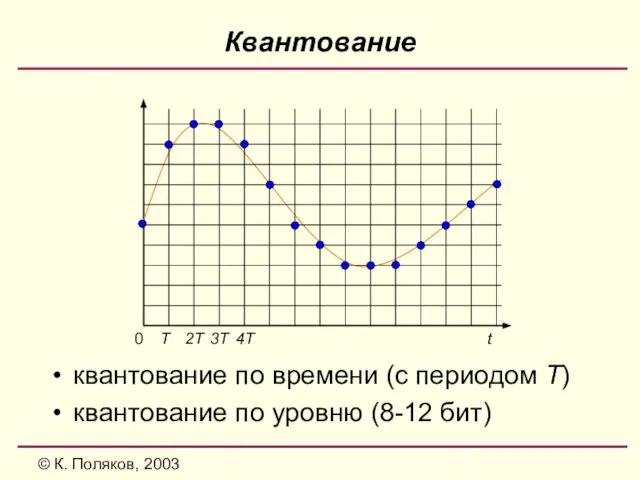
Квантование
квантование по времени (с периодом T)
квантование по уровню
© К. Поляков, 2003
Квантование
квантование по времени (с периодом T)
квантование по уровню
© К. Поляков, 2003
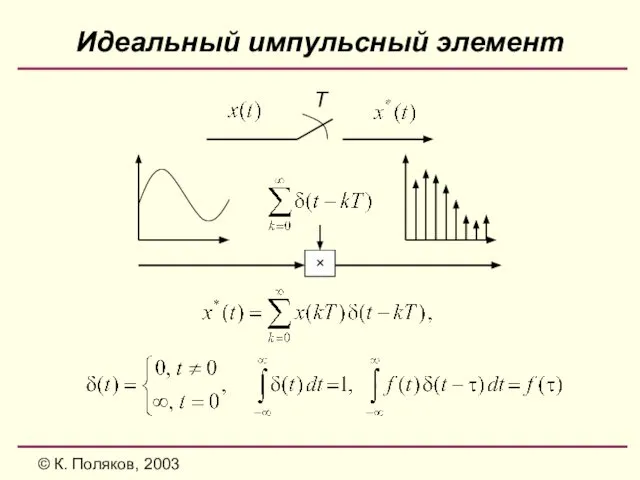
Идеальный импульсный элемент
T
×
© К. Поляков, 2003
Идеальный импульсный элемент
T
×
© К. Поляков, 2003
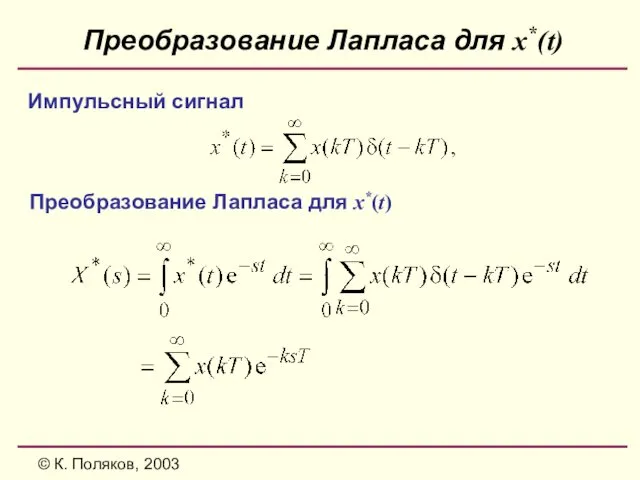
Преобразование Лапласа для x*(t)
Преобразование Лапласа для x*(t)
Импульсный сигнал
© К. Поляков, 2003
Преобразование Лапласа для x*(t)
Преобразование Лапласа для x*(t)
Импульсный сигнал
© К. Поляков, 2003
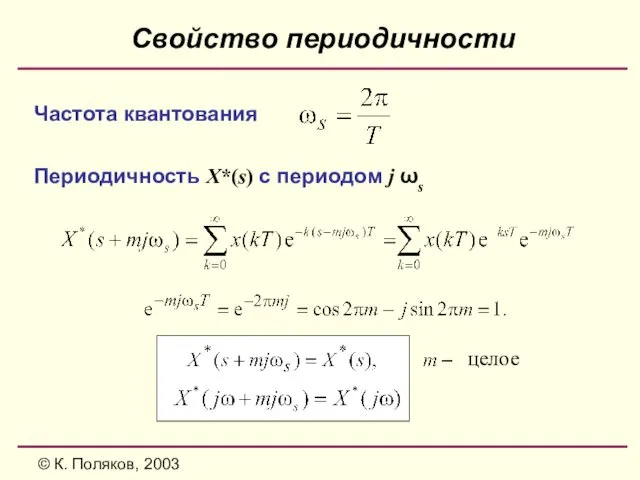
Частота квантования
Свойство периодичности
целое
Периодичность X*(s) с периодом j ωs
© К. Поляков, 2003
Частота квантования
Свойство периодичности
целое
Периодичность X*(s) с периодом j ωs
© К. Поляков, 2003
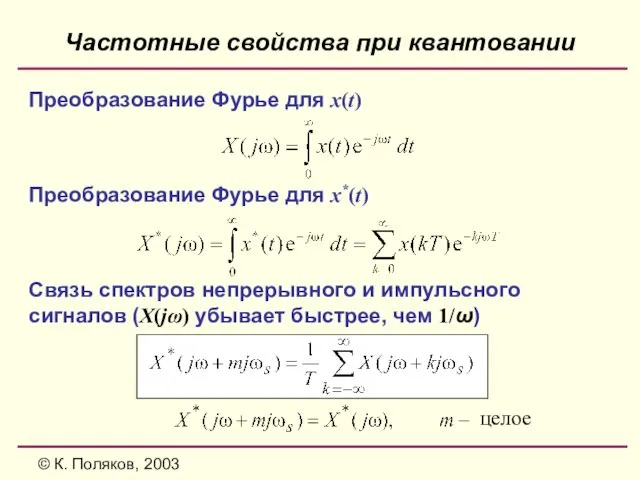
Частотные свойства при квантовании
Преобразование Фурье для x(t)
Связь спектров
© К. Поляков, 2003
Частотные свойства при квантовании
Преобразование Фурье для x(t)
Связь спектров
© К. Поляков, 2003
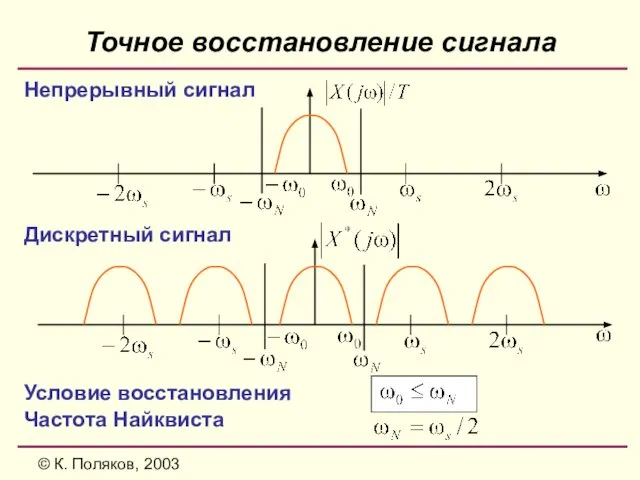
Точное восстановление сигнала
Непрерывный сигнал
Дискретный сигнал
Условие восстановления
Частота Найквиста
© К. Поляков, 2003
Точное восстановление сигнала
Непрерывный сигнал
Дискретный сигнал
Условие восстановления
Частота Найквиста
© К. Поляков, 2003
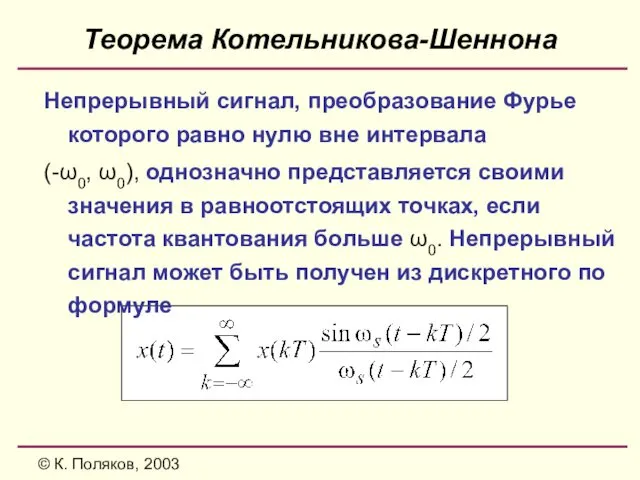
Теорема Котельникова-Шеннона
Непрерывный сигнал, преобразование Фурье которого равно нулю
© К. Поляков, 2003
Теорема Котельникова-Шеннона
Непрерывный сигнал, преобразование Фурье которого равно нулю

© К. Поляков, 2003
Эффект поглощения частот
Дискретный сигнал
Сигнал восстановить нельзя:
Непрерывный сигнал
© К. Поляков, 2003
Эффект поглощения частот
Дискретный сигнал
Сигнал восстановить нельзя:
Непрерывный сигнал
© К. Поляков, 2003
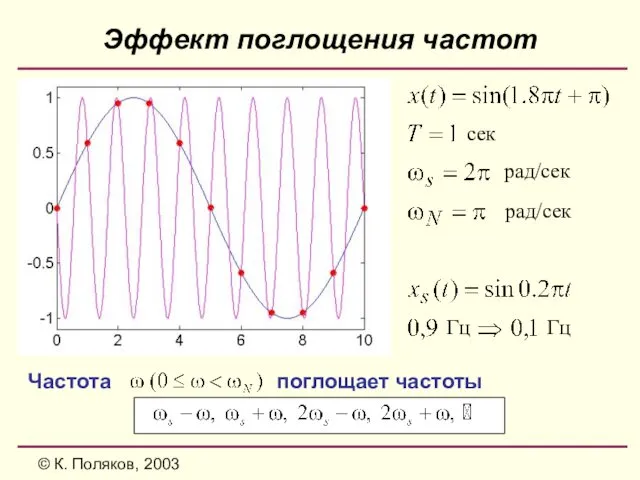
Эффект поглощения частот
Частота поглощает частоты
сек
рад/сек
Гц
рад/сек
Гц
© К. Поляков, 2003
Эффект поглощения частот
Частота поглощает частоты
сек
рад/сек
Гц
рад/сек
Гц
© К. Поляков, 2003
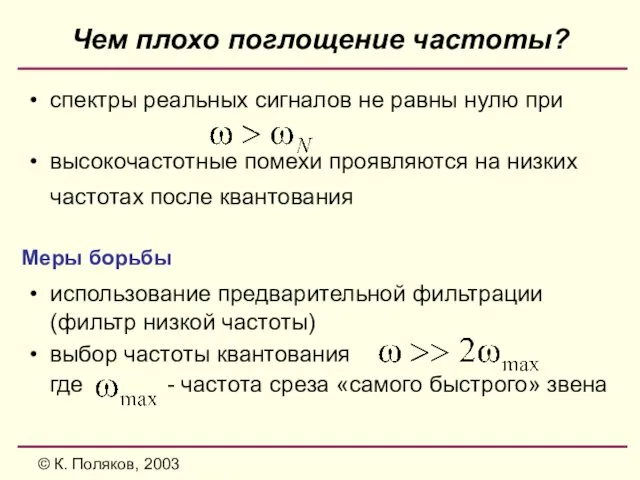
Чем плохо поглощение частоты?
спектры реальных сигналов не равны
© К. Поляков, 2003
Чем плохо поглощение частоты?
спектры реальных сигналов не равны
© К. Поляков, 2003
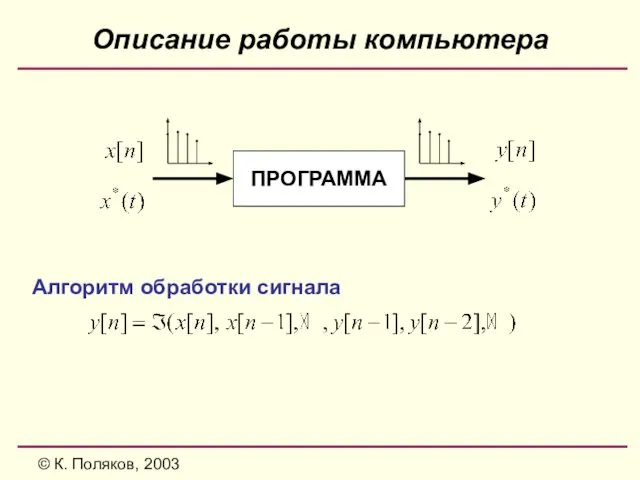
Описание работы компьютера
ПРОГРАММА
Алгоритм обработки сигнала
© К. Поляков, 2003
Описание работы компьютера
ПРОГРАММА
Алгоритм обработки сигнала
© К. Поляков, 2003
Линейные законы управления
Скользящее среднее (СС) (MA – moving
© К. Поляков, 2003
Линейные законы управления
Скользящее среднее (СС) (MA – moving
© К. Поляков, 2003
Операторная запись
Оператор обратного сдвига (назад), ζ или z-1
Передаточная
© К. Поляков, 2003
Операторная запись
Оператор обратного сдвига (назад), ζ или z-1
Передаточная
© К. Поляков, 2003
Оператор прямого сдвига
Оператор прямого сдвига (вперед)
будущие значения –
© К. Поляков, 2003
Оператор прямого сдвига
Оператор прямого сдвига (вперед)
будущие значения –
© К. Поляков, 2003
Восстановление сигнала
Фиксатор нулевого порядка (ZOH – zero order
© К. Поляков, 2003
Восстановление сигнала
Фиксатор нулевого порядка (ZOH – zero order
© К. Поляков, 2003
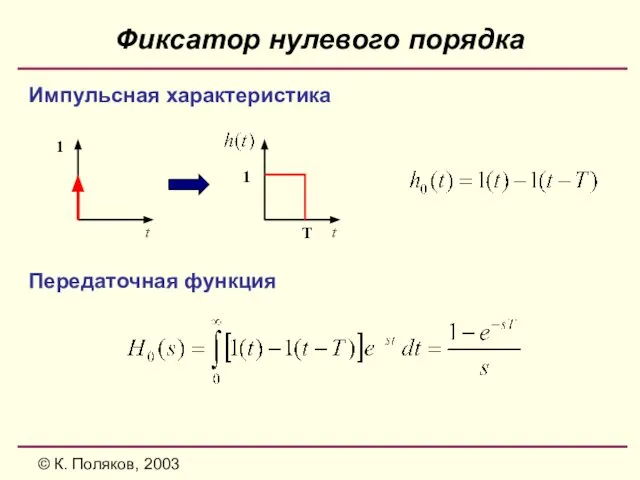
Фиксатор нулевого порядка
Импульсная характеристика
Передаточная функция
1
1
1
T
© К. Поляков, 2003
Фиксатор нулевого порядка
Импульсная характеристика
Передаточная функция
1
1
1
T
© К. Поляков, 2003
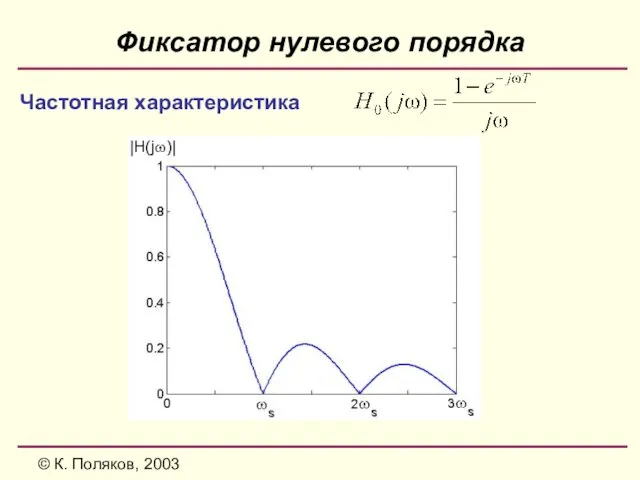
Фиксатор нулевого порядка
Частотная характеристика
© К. Поляков, 2003
Фиксатор нулевого порядка
Частотная характеристика
© К. Поляков, 2003
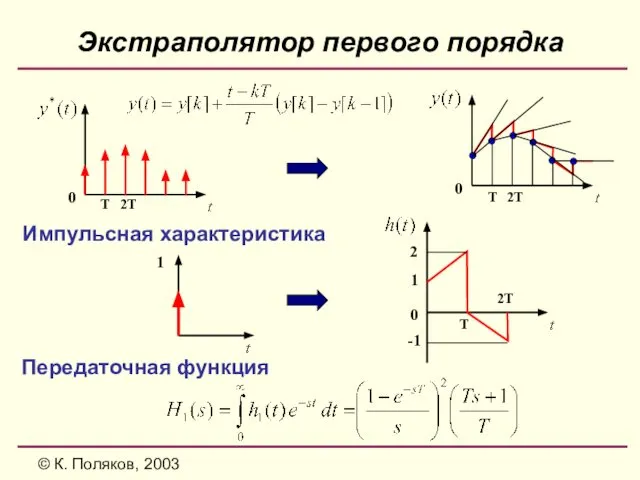
Экстраполятор первого порядка
Передаточная функция
1
Импульсная характеристика
© К. Поляков, 2003
Экстраполятор первого порядка
Передаточная функция
1
Импульсная характеристика
© К. Поляков, 2003
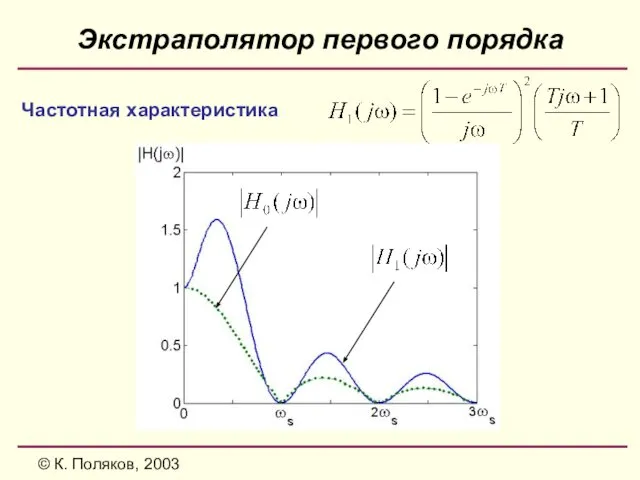
Экстраполятор первого порядка
Частотная характеристика
© К. Поляков, 2003
Экстраполятор первого порядка
Частотная характеристика
© К. Поляков, 2003
Преимущества цифровых систем
Стандартная аппаратура
Нет дрейфа параметров
Гибкость, легкость настройки
Возможность
© К. Поляков, 2003
Преимущества цифровых систем
Стандартная аппаратура
Нет дрейфа параметров
Гибкость, легкость настройки
Возможность
© К. Поляков, 2003
Недостатки цифровых систем
Дискретизация сигналов приводит к потере точности
Теряется
© К. Поляков, 2003
Недостатки цифровых систем
Дискретизация сигналов приводит к потере точности
Теряется
 Эрг_анализ проф_деят_Ч_2- 2020
Эрг_анализ проф_деят_Ч_2- 2020 Пищевая промышленность
Пищевая промышленность Биполярный транзистор
Биполярный транзистор Задание на проверку пиратской сноровки
Задание на проверку пиратской сноровки _2022-07-28 этапы ввода строительства
_2022-07-28 этапы ввода строительства Оборудование эксплуатационной скважины
Оборудование эксплуатационной скважины Вечная память… Любимому брату Алексею. Фотоальбом
Вечная память… Любимому брату Алексею. Фотоальбом 20150128_raznoobrazie_gribov
20150128_raznoobrazie_gribov Статегии проведения выборной кампании губернатора новгородской области по поддорскому муниципальному району
Статегии проведения выборной кампании губернатора новгородской области по поддорскому муниципальному району Электроприводы с синхронными двигателями
Электроприводы с синхронными двигателями рЕШЕНИЕ ОПЕРАТИВНЫХ ЗАДАЧ
рЕШЕНИЕ ОПЕРАТИВНЫХ ЗАДАЧ Летопись. Повесть современных лет
Летопись. Повесть современных лет Итоги производственной и финансовой деятельности филиала Черепетская ГРЭС имени Д.Г. Жимерина
Итоги производственной и финансовой деятельности филиала Черепетская ГРЭС имени Д.Г. Жимерина Катанье с ледяных гор и на лошадях
Катанье с ледяных гор и на лошадях В. И. Даль Пословицы русского народа
В. И. Даль Пословицы русского народа Детская площадка. Проект
Детская площадка. Проект Технология 3 класс
Технология 3 класс 20140819_vremya_oseni
20140819_vremya_oseni Адвант форма Еженедельный отчет BF 20-23 ноября
Адвант форма Еженедельный отчет BF 20-23 ноября 20151201_prezentatsiya_microsoft_powerpoint_0
20151201_prezentatsiya_microsoft_powerpoint_0 rerehepf
rerehepf Расчет режимов сварки. Сварочное оборудование
Расчет режимов сварки. Сварочное оборудование Фотоальбом команды Гепарды
Фотоальбом команды Гепарды История театральных масок
История театральных масок 20151008_naturalnye_volokna_zhivotnogo_proishozhdeniya
20151008_naturalnye_volokna_zhivotnogo_proishozhdeniya Технология и организация высокотехнологичного производства
Технология и организация высокотехнологичного производства Обмен веществ. Принципы исследования энергетического обмена. Физиологические основы рационального питания
Обмен веществ. Принципы исследования энергетического обмена. Физиологические основы рационального питания Основная позиция пальцев на клавиатуре
Основная позиция пальцев на клавиатуре