- Алгоритмы управления систем синхронного электропривода

Содержание
- 2. Синхронные двигатели применяются в электроприводах, обеспечивающих постоянную скорость в установившихся режимах. Такие двигатели используются так же,
- 3. В установившихся режимам регулирование обусловлено требованиями системы электроснабжения, и осуществляется по одному из следующих алгоритмов обеспечивающих
- 4. При плавно изменяющейся нагрузке двигателя, вызывающей колебания напряжения питания, превышающие допустимые значения, используется управление, обеспечивающее стабилизацию
- 5. При резкопеременной и знакопеременной нагрузках стабилизируется реактивная мощность двигателя (Q = const). При этом обеспечиваются минимальные
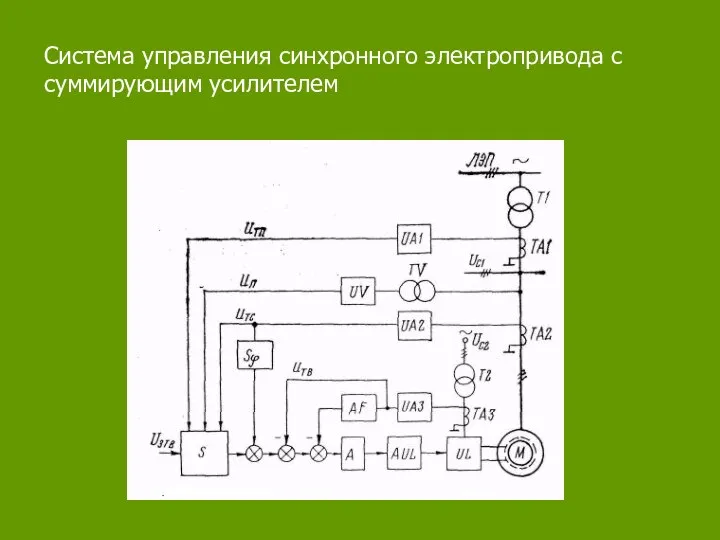
- 6. Система управления синхронного электропривода с суммирующим усилителем
- 7. При ручном управлении СЭП обеспечивает пуск синхронного двигателя при полном (прямой) или пониженном (легкий или тяжелый)
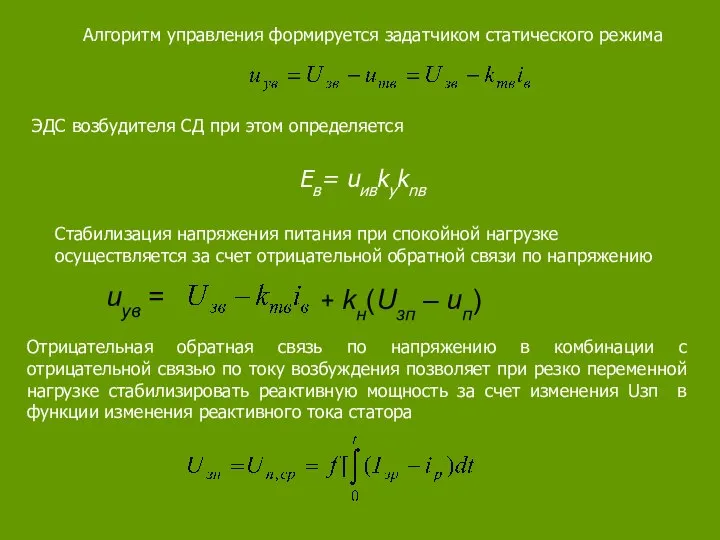
- 8. Алгоритм управления формируется задатчиком статического режима ЭДС возбудителя СД при этом определяется Eв= uивkyknв Стабилизация напряжения
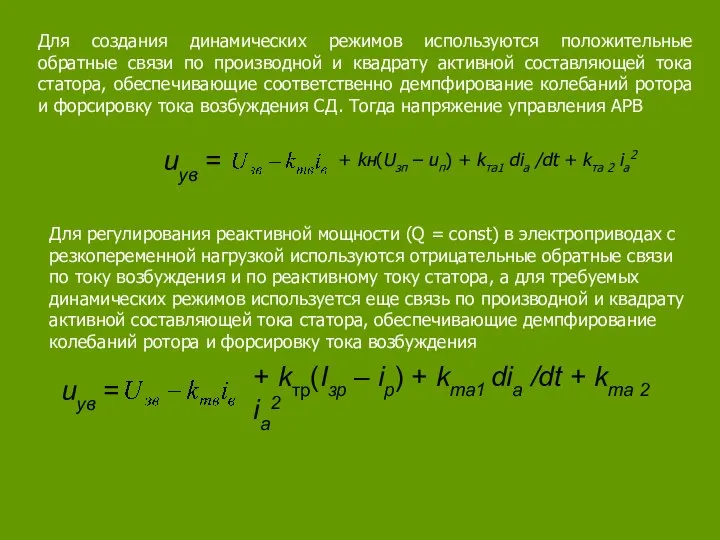
- 9. Для создания динамических режимов используются положительные обратные связи по производной и квадрату активной составляющей тока статора,
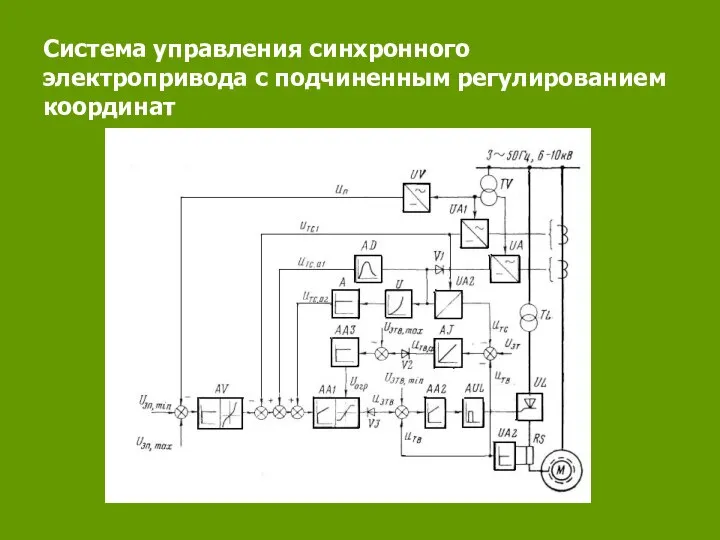
- 10. Система управления синхронного электропривода с подчиненным регулированием координат
- 11. Для улучшения динамических режимов на регулятор АА1 дополнительно вводятся сигналы, пропорциональные производной uта,1 и квадрату uта,2
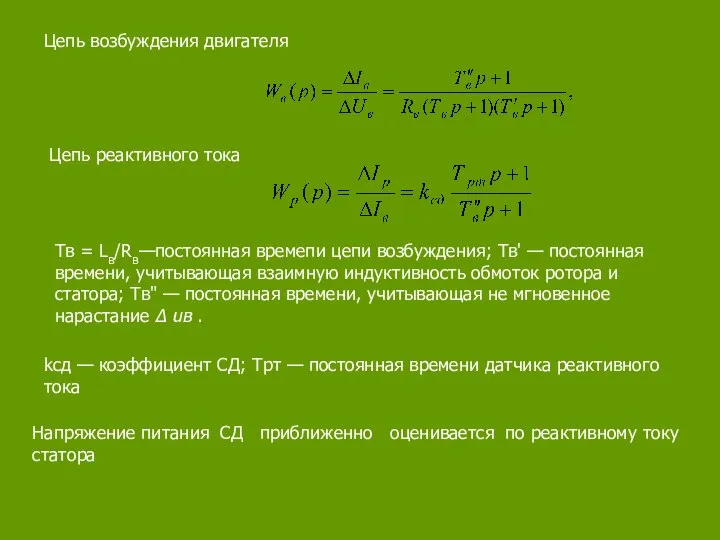
- 13. Цепь возбуждения двигателя Цепь реактивного тока Tв = Lв/Rв—постоянная времепи цепи возбуждения; Тв' — постоянная времени,
- 14. хпэ — эквивалентное фазное реактивное сопротивления питающей сети Цепь активного тока Iр° — фиксированное установившееся значение
- 15. Передаточная функция замкнутого оптимизируемого контура тока возбуждения Регулятор реактивного тока принимается пропорционально-интегральным с передаточной функцией Регулятор
- 16. Корректирующие связи по производной и квадрату активного тока статора выполняются в виде дифференциального регулятора (ДР) AD
- 17. Это реализуется введением ДР с передаточной функцией где T1 = ; Т2 = Т1 - Тктр;
- 18. Системы частотного управления синхронного электропривода При необходимости регулирования скорости и момента СД его обмотка статора питается
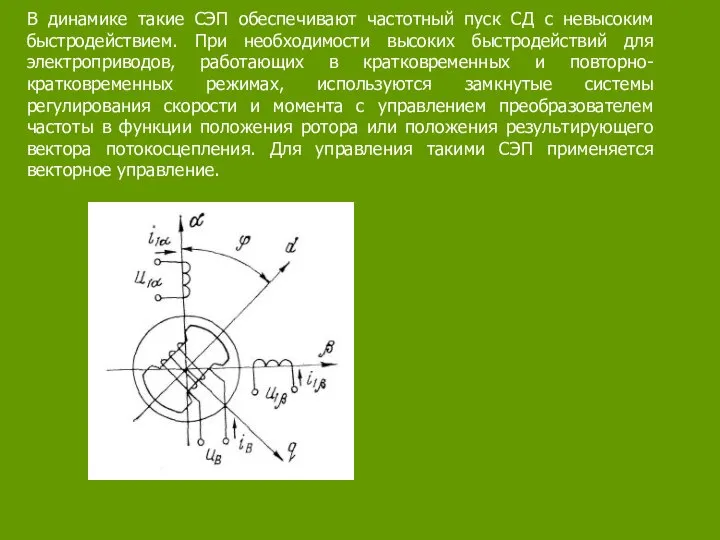
- 19. В динамике такие СЭП обеспечивают частотный пуск СД с невысоким быстродействием. При необходимости высоких быстродействий для
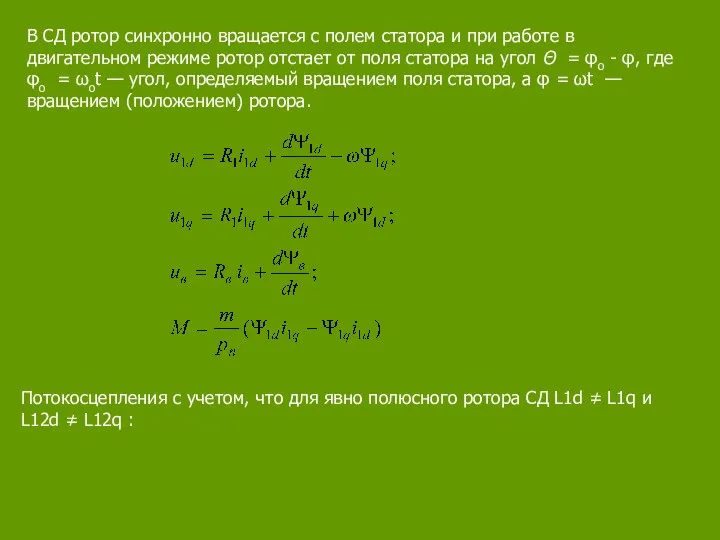
- 20. В СД ротор синхронно вращается с полем статора и при работе в двигательном режиме ротор отстает
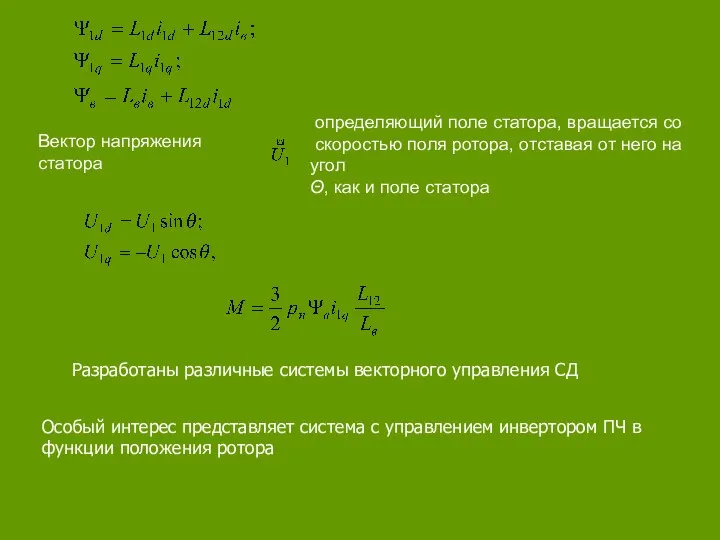
- 21. Вектор напряжения статора определяющий поле статора, вращается со скоростью поля ротора, отставая от него на угол
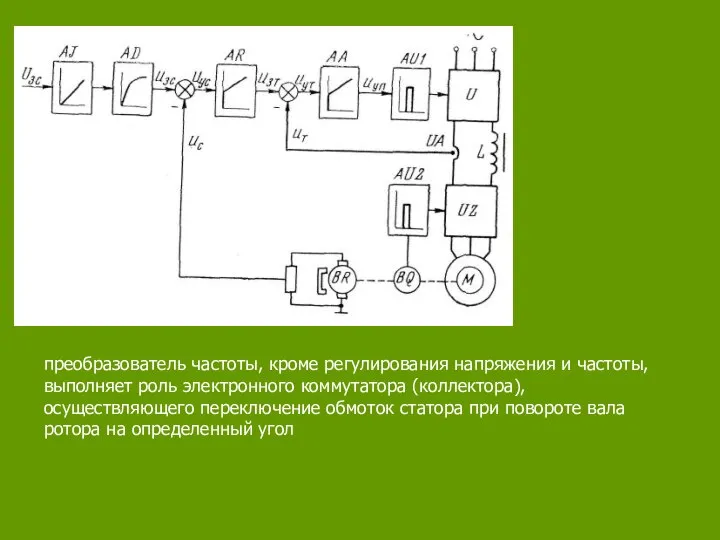
- 22. преобразователь частоты, кроме регулирования напряжения и частоты, выполняет роль электронного коммутатора (коллектора), осуществляющего переключение обмоток статора
- 23. Переключение фаз обмотки статора СД обеспечивает инвертор с помощью СУИ AU2, представляющей собой формирователь и распределитель
- 25. Скачать презентацию
Синхронные двигатели применяются в электроприводах, обеспечивающих постоянную скорость в установившихся режимах.
Синхронные двигатели применяются в электроприводах, обеспечивающих постоянную скорость в установившихся режимах.
В установившихся режимам регулирование обусловлено требованиями системы электроснабжения, и осуществляется по
В установившихся режимам регулирование обусловлено требованиями системы электроснабжения, и осуществляется по
При плавно изменяющейся нагрузке двигателя, вызывающей колебания напряжения питания, превышающие допустимые
При плавно изменяющейся нагрузке двигателя, вызывающей колебания напряжения питания, превышающие допустимые
При резкопеременной и знакопеременной нагрузках стабилизируется реактивная мощность двигателя (Q =
При резкопеременной и знакопеременной нагрузках стабилизируется реактивная мощность двигателя (Q =
Система управления синхронного электропривода с суммирующим усилителем
Система управления синхронного электропривода с суммирующим усилителем
При ручном управлении СЭП обеспечивает пуск синхронного двигателя при полном (прямой)
При ручном управлении СЭП обеспечивает пуск синхронного двигателя при полном (прямой)
Алгоритм управления формируется задатчиком статического режима
ЭДС возбудителя СД при этом определяется
Алгоритм управления формируется задатчиком статического режима
ЭДС возбудителя СД при этом определяется
Для создания динамических режимов используются положительные обратные связи по производной и
Для создания динамических режимов используются положительные обратные связи по производной и
Система управления синхронного электропривода с подчиненным регулированием координат
Система управления синхронного электропривода с подчиненным регулированием координат
Для улучшения динамических режимов на регулятор АА1 дополнительно вводятся сигналы, пропорциональные
Для улучшения динамических режимов на регулятор АА1 дополнительно вводятся сигналы, пропорциональные
Цепь возбуждения двигателя
Цепь реактивного тока
Tв = Lв/Rв—постоянная времепи цепи возбуждения;
Цепь возбуждения двигателя
Цепь реактивного тока
Tв = Lв/Rв—постоянная времепи цепи возбуждения;
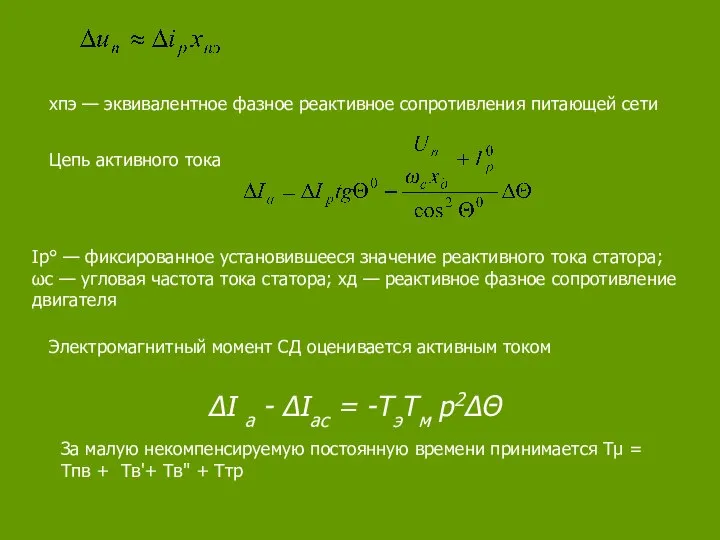
хпэ — эквивалентное фазное реактивное сопротивления питающей сети
Цепь активного тока
хпэ — эквивалентное фазное реактивное сопротивления питающей сети
Цепь активного тока
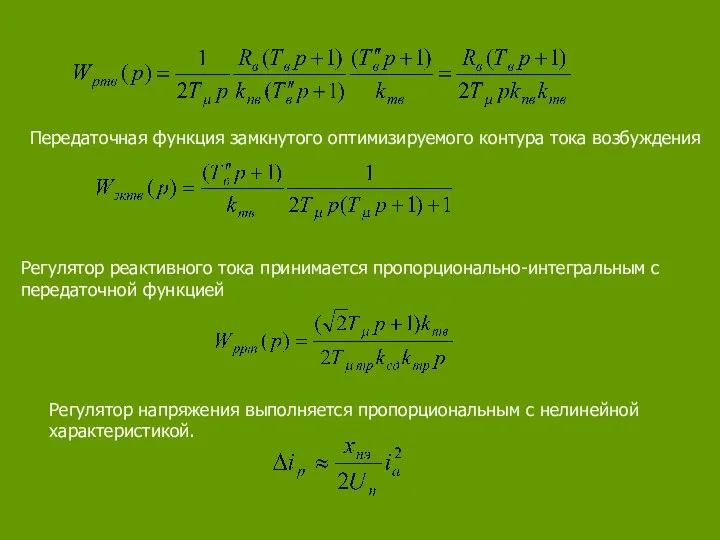
Передаточная функция замкнутого оптимизируемого контура тока возбуждения
Регулятор реактивного тока принимается пропорционально-интегральным
Передаточная функция замкнутого оптимизируемого контура тока возбуждения
Регулятор реактивного тока принимается пропорционально-интегральным
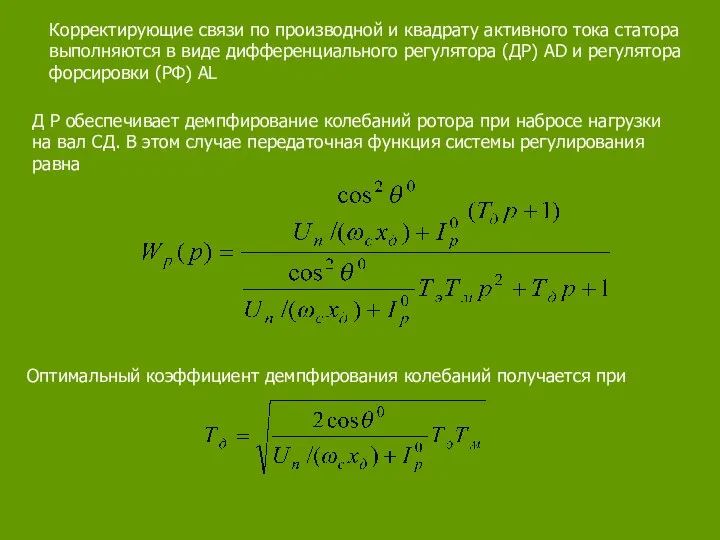
Корректирующие связи по производной и квадрату активного тока статора выполняются в
Корректирующие связи по производной и квадрату активного тока статора выполняются в
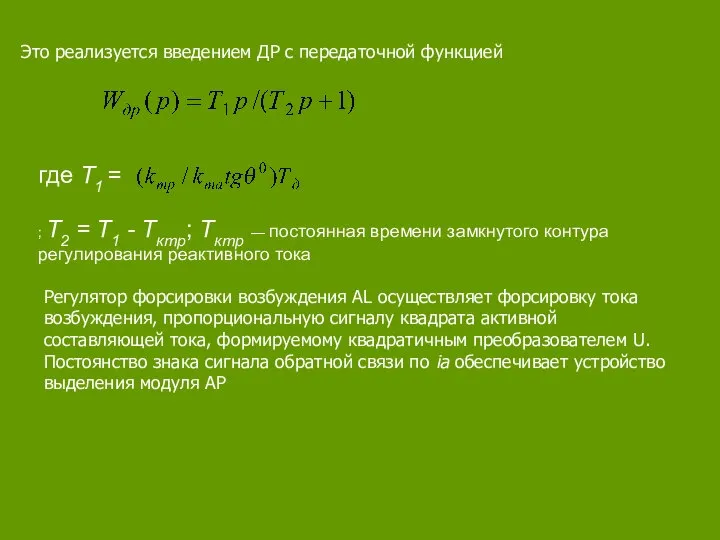
Это реализуется введением ДР с передаточной функцией
где T1 =
;
Это реализуется введением ДР с передаточной функцией
где T1 =
;
Системы частотного управления синхронного электропривода
При необходимости регулирования скорости и момента СД
Системы частотного управления синхронного электропривода
При необходимости регулирования скорости и момента СД
В динамике такие СЭП обеспечивают частотный пуск СД с невысоким быстродействием.
В динамике такие СЭП обеспечивают частотный пуск СД с невысоким быстродействием.
В СД ротор синхронно вращается с полем статора и при работе
В СД ротор синхронно вращается с полем статора и при работе
Вектор напряжения статора
определяющий поле статора, вращается со
скоростью поля
Вектор напряжения статора
определяющий поле статора, вращается со
скоростью поля
преобразователь частоты, кроме регулирования напряжения и частоты, выполняет роль электронного коммутатора
преобразователь частоты, кроме регулирования напряжения и частоты, выполняет роль электронного коммутатора
Переключение фаз обмотки статора СД обеспечивает инвертор с помощью СУИ AU2,
Переключение фаз обмотки статора СД обеспечивает инвертор с помощью СУИ AU2,
 Банковская система Фатеева Т.А., учитель истории МБОУ-гимназии №20 г.Тулы
Банковская система Фатеева Т.А., учитель истории МБОУ-гимназии №20 г.Тулы Условные конструкции
Условные конструкции Презентация Экспертиза рыбных консервов
Презентация Экспертиза рыбных консервов WinApi. Основные типы данных
WinApi. Основные типы данных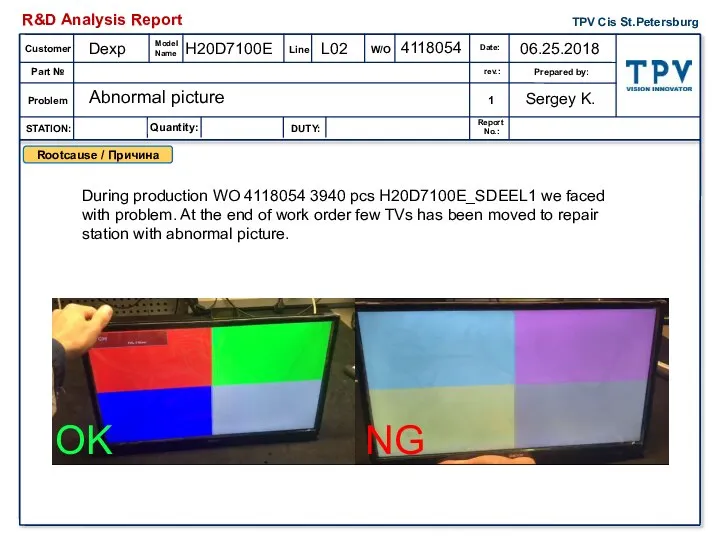 R&D Analysis Report
R&D Analysis Report Организация профилактики правонарушений и безнадзорности.
Организация профилактики правонарушений и безнадзорности. Международно-правовое регулирование труда
Международно-правовое регулирование труда Практ.раб.ТФ1
Практ.раб.ТФ1 The 5 best Web Designing Secrets
The 5 best Web Designing Secrets Бизнес – проект создания детского кафе «Сладкоежка по оказанию услуг детского питания»
Бизнес – проект создания детского кафе «Сладкоежка по оказанию услуг детского питания»  Красная книга Животные и растения Смагина Елена Пантелеймоновна ГОУ № 354 Г. Санкт-петербурга
Красная книга Животные и растения Смагина Елена Пантелеймоновна ГОУ № 354 Г. Санкт-петербурга Сущность и принципы общественных закупок
Сущность и принципы общественных закупок Перекрытия. Классификация
Перекрытия. Классификация Історія України Тренінг: Новітня історія: 1939 – по сьогодні
Історія України Тренінг: Новітня історія: 1939 – по сьогодні Вiра i свiтло
Вiра i свiтло Постмодерн как состояние современной культуры
Постмодерн как состояние современной культуры C#, объектно-ориентированное программирование
C#, объектно-ориентированное программирование «Ученик, который учится без желания, это птица без крыльев». Саади
«Ученик, который учится без желания, это птица без крыльев». Саади Операторы языка Pascal
Операторы языка Pascal Школьный спортивный клуб «Фаворит»
Школьный спортивный клуб «Фаворит»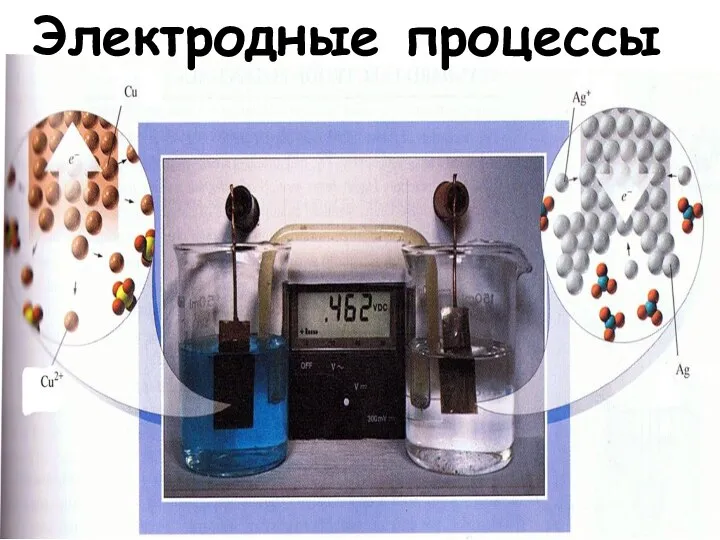 Электродные процессы
Электродные процессы Презентация Функции банка
Презентация Функции банка Условия перевозок скоропортящихся грузов в вагонах и контейнерах
Условия перевозок скоропортящихся грузов в вагонах и контейнерах  Презентация "Пабло Пикассо (1881-1973)" - скачать презентации по МХК
Презентация "Пабло Пикассо (1881-1973)" - скачать презентации по МХК Власть как политический феномен
Власть как политический феномен Организация зоны технического обслуживания и ремонта АТП «ИП Дедов» по восстановлению коленчатого вала автомобилей ЗИЛ 130
Организация зоны технического обслуживания и ремонта АТП «ИП Дедов» по восстановлению коленчатого вала автомобилей ЗИЛ 130 Открытое занятие «Путешествие в мир театра» Воспитатель 8б класса Степанова А.Ю.
Открытое занятие «Путешествие в мир театра» Воспитатель 8б класса Степанова А.Ю.  Радиография сварного шва
Радиография сварного шва