- Аналитический метод кинематического анализа. Функции положения. Аналоги скоростей и ускорений

Содержание
- 2. Тема 4
- 3. Тема 4
- 4. Тема 4
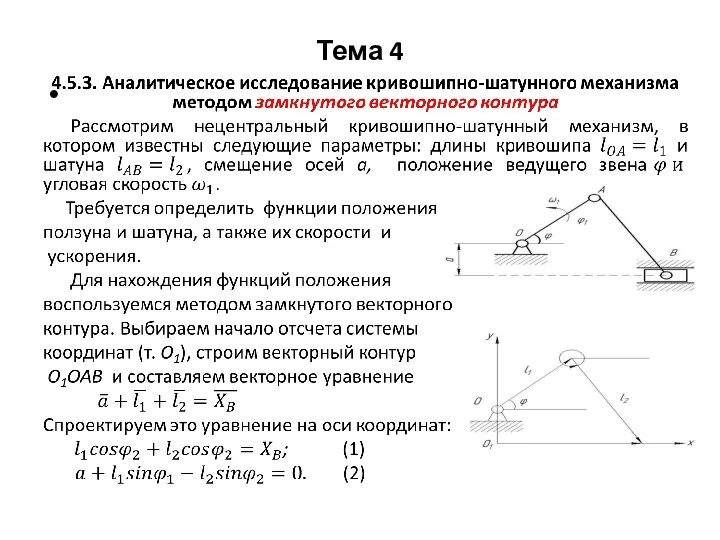
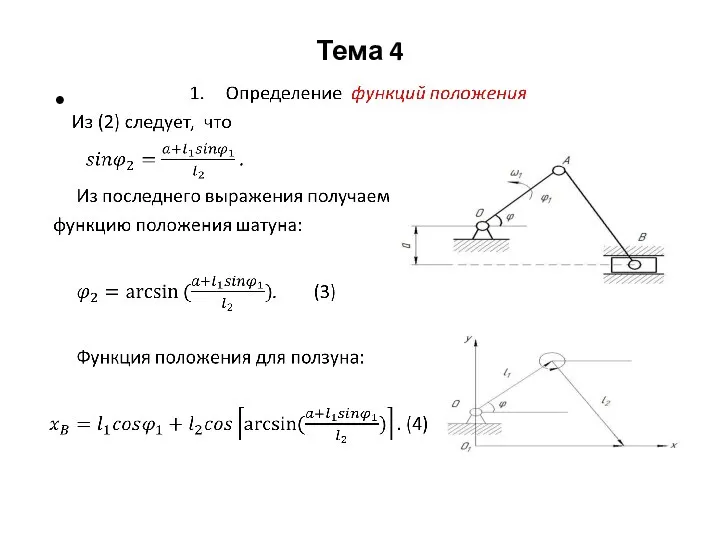
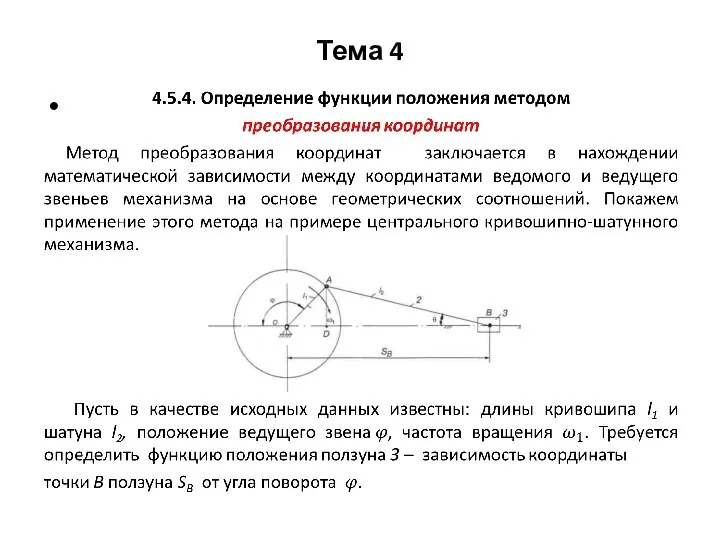
- 5. Тема 4 4.5.2. Кинематический анализ механизмов аналитическим методом. Одной из основных проблем аналитического метода кинематического анализа
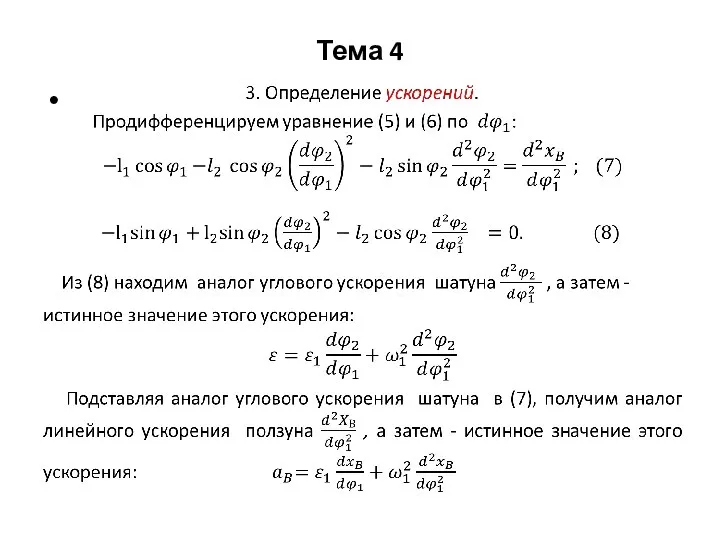
- 6. Тема 4 Путем дифференцирования полученных функций положения по обобщенной координате ведущего звена сначала находятся аналоги скоростей
- 7. Тема 4
- 8. Тема 4
- 9. Тема 4
- 10. Тема 4
- 11. Тема 4
- 12. Тема 4
- 13. Тема 5. Кинетостатический (силовой) анализ механизмов 5.1. Задачи и методы силового анализа. Силовой анализ – это
- 14. Тема 5 При силовом анализе решаются две прикладные задачи: – определение реакций в кинематических парах; –
- 16. Скачать презентацию
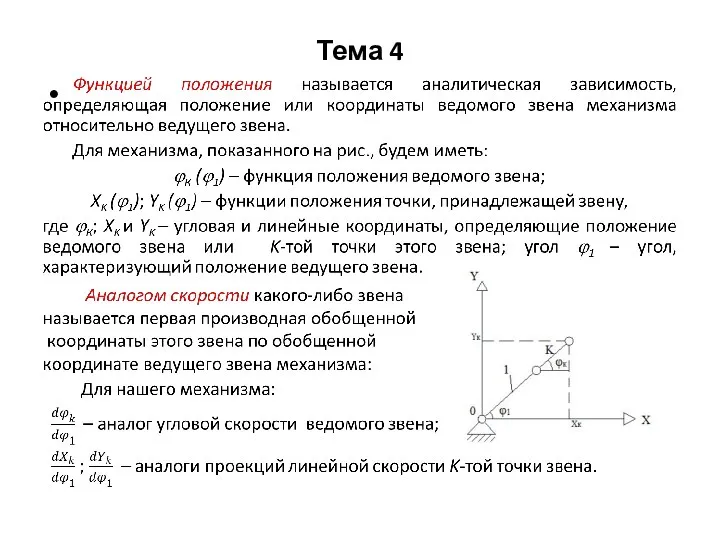
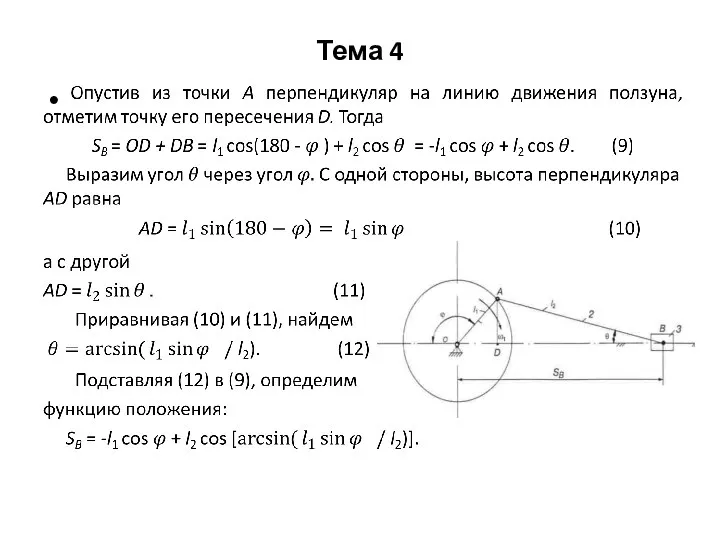
Тема 4
Тема 4
Тема 4
Тема 4

Тема 4
Тема 4
Тема 4
4.5.2. Кинематический анализ механизмов аналитическим методом.
Одной из основных проблем
Тема 4
4.5.2. Кинематический анализ механизмов аналитическим методом.
Одной из основных проблем
Тема 4
Путем дифференцирования полученных функций положения по обобщенной координате ведущего
Тема 4
Путем дифференцирования полученных функций положения по обобщенной координате ведущего
Тема 4
Тема 4
Тема 4
Тема 4

Тема 4
Тема 4
Тема 4
Тема 4
Тема 4
Тема 4
Тема 4
Тема 4
Тема 5. Кинетостатический (силовой) анализ механизмов
5.1. Задачи и методы силового анализа.
Тема 5. Кинетостатический (силовой) анализ механизмов
5.1. Задачи и методы силового анализа.
Тема 5
При силовом анализе решаются две прикладные задачи:
– определение реакций
Тема 5
При силовом анализе решаются две прикладные задачи:
– определение реакций
 Видовые пары и противопоставление видов
Видовые пары и противопоставление видов Презентация "Виды пейзажа" - скачать презентации по МХК
Презентация "Виды пейзажа" - скачать презентации по МХК Мочегонные травы Кафедра урологии
Мочегонные травы Кафедра урологии Духовная сфера
Духовная сфера Продвижение ВФСК ГТО среди сверстников
Продвижение ВФСК ГТО среди сверстников Сопротивление материалов
Сопротивление материалов «Откуда к нам хлеб пришёл» Габитова Инна Юрьевна
«Откуда к нам хлеб пришёл» Габитова Инна Юрьевна  Первая помощь при термических ожогах
Первая помощь при термических ожогах  Сущность и современное понимание менеджмента, ориентированного на рынок
Сущность и современное понимание менеджмента, ориентированного на рынок Методика изображения животных
Методика изображения животных Русская матрешка
Русская матрешка Политический процесс
Политический процесс Дар созидания Эстетическое формирование искусством окружающей среды
Дар созидания Эстетическое формирование искусством окружающей среды  Программирование на языке Паскаль. Ветвления
Программирование на языке Паскаль. Ветвления Плойки. Разновидности плоек
Плойки. Разновидности плоек Великобританія Великобританія розташована на північному заході Європи, на Британських островах. Великобританія омивається Атла
Великобританія Великобританія розташована на північному заході Європи, на Британських островах. Великобританія омивається Атла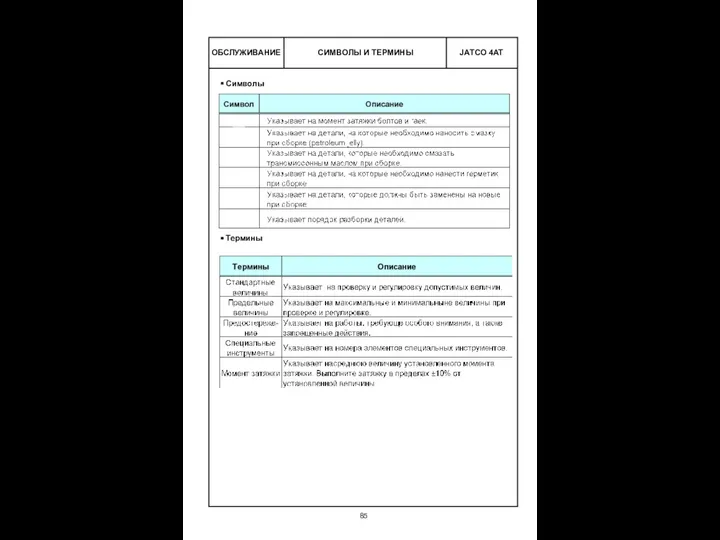 Коробка передач (4AT,JATCO). Составные части
Коробка передач (4AT,JATCO). Составные части Орта Азияны ұлттық-мемлекеттік тұрғыдан межелеу саясаты, оның Қазақстанға әсері
Орта Азияны ұлттық-мемлекеттік тұрғыдан межелеу саясаты, оның Қазақстанға әсері Структуры. Объединения. Поля битов в структурах и объединениях. (Лекция 17)
Структуры. Объединения. Поля битов в структурах и объединениях. (Лекция 17) Трехпозиционное командное планирование. Мозговой штурм по методу Уолта Диснея
Трехпозиционное командное планирование. Мозговой штурм по методу Уолта Диснея ФинЭк Анализ Профессиональная система финансового анализа 12 лет успешной работы!
ФинЭк Анализ Профессиональная система финансового анализа 12 лет успешной работы! Оптимизации генерации кода в JIT-компиляторе виртуальной машины Java
Оптимизации генерации кода в JIT-компиляторе виртуальной машины Java Работу выполнила: Абрамова Анна Сергеевна, ученица 7 В класса МОУ СОШ 36
Работу выполнила: Абрамова Анна Сергеевна, ученица 7 В класса МОУ СОШ 36 1 мамыр – Қазақстан халықтарының бірлігі күні
1 мамыр – Қазақстан халықтарының бірлігі күні Элементы квантовой статистики
Элементы квантовой статистики  КАПТУР СВІТЛАНА МИХАЙЛІВНА
КАПТУР СВІТЛАНА МИХАЙЛІВНА ВИЧ-инфекция/СПИД (Z21, B20-B24)
ВИЧ-инфекция/СПИД (Z21, B20-B24)  МОУ «Целинная средняя (полная) общеобразовательная школа №2» ученица 1 класса Мотина Катя Тема исследования: «Рядом с нами»
МОУ «Целинная средняя (полная) общеобразовательная школа №2» ученица 1 класса Мотина Катя Тема исследования: «Рядом с нами»