- Апаратура обчислювальних засобів. Пристрій управління висотомірами (Заняття № 7.22)

Содержание
- 2. Устрій та бойове застосування КЗА 86Ж6 Тема №7: Апаратура обчислювальних засобів Заняття № 22 Пристрій управління
- 3. Навчальні питання 1. Принципи розв’язання задач вимірювання висоти в КЗА 86Ж6. 2. Призначення, склад і принцип
- 4. При розв’язанні задачі визначення висоти повітряних об’єктів, що супроводжуються в КЗА 86Ж6 можливо виникнення наступних випадків:
- 5. Якщо КТ-А належить РЛС ПРВ-17 в режимі кругового огляду, то аналізується ознака витка станції. Якщо виток
- 6. Для визначення висоти польоту ПО, які супроводжуються двохкоординатними станціями, використовується група програм УПР РВ, котра забезпечує
- 7. Рішення вказаної задачі виконується у наступній послідовності: вибір РВ для вимірів кута місця ВО; вибір ПО;
- 8. У першому випадку у формулярі технічного стану на БИВ РМ-5 несправний висотомір позначається колом і йому
- 9. Вибір ПО на вимір кута місця робиться періодично, раз у 10 сек, за результатами контролю стану
- 10. Інші ПО вибираються на вимір кута місця в порядку наступної пріоритетності: ПО з розпорядженням "Вимірити висоту"
- 11. Одночасно біля системної контрольної точки на РМ-5 відображаються символи Ц1 (Ц2). Цілевказівка вважається відпрацьованою при спільному
- 13. Повідомлення Т-РМ використовується в якості екстраполяційної точки, поруч з яким може відображатися символ Л, який означає
- 14. Повідомлення КТ-ОП, яке надійшло з РМ-5, аналізується на предмет коректності інформації, що міститься в ньому. Якщо
- 15. При надходженні повідомлення КТ-ОП з ознакою "Пропуск відлуння" ця ознака заноситься у формуляр ПО і в
- 16. Пристрій керування висотомірами УУВ призначений для забезпечення автоматичного вивидення антенних систем радіовисотомірів РВ на заданий азимут
- 17. УУВ являє собою пристрій сполучення між спецобчислювачем СВ-1 і двома радіовисотомірами РВ1 та РВ2, виконаний у
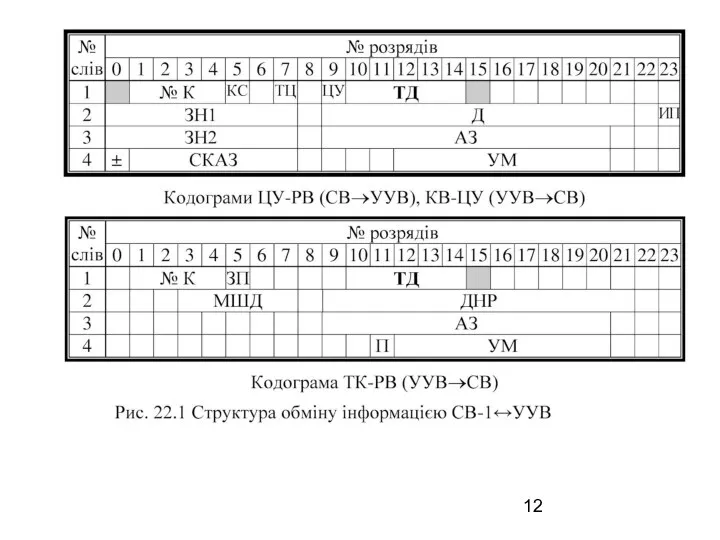
- 18. Отримані в повідомленнях ЦУ-РВ1 і ЦУ-РВ2 коди цілевказівок по β перетворюються в аналогові сигнали ССП β1
- 19. Від УУВ на РВ1 і РВ2 видаються синусоїдальні сигнали sinωt і cosωt. Зсув фаз φ1 і
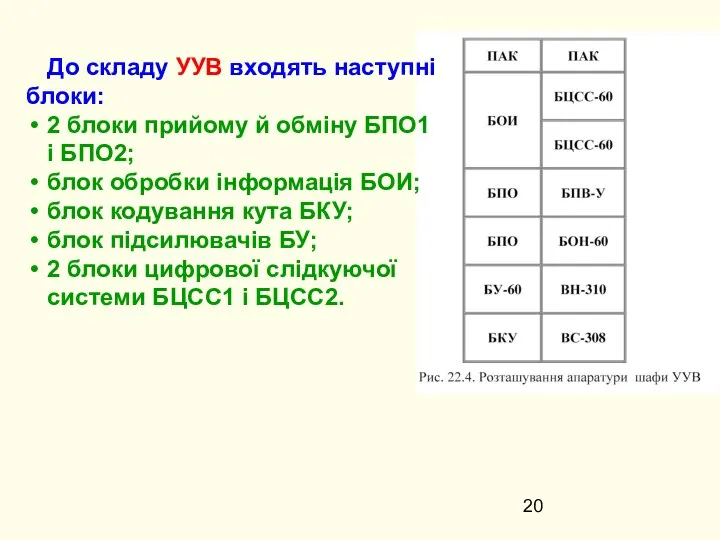
- 20. До складу УУВ входять наступні блоки: 2 блоки прийому й обміну БПО1 і БПО2; блок обробки
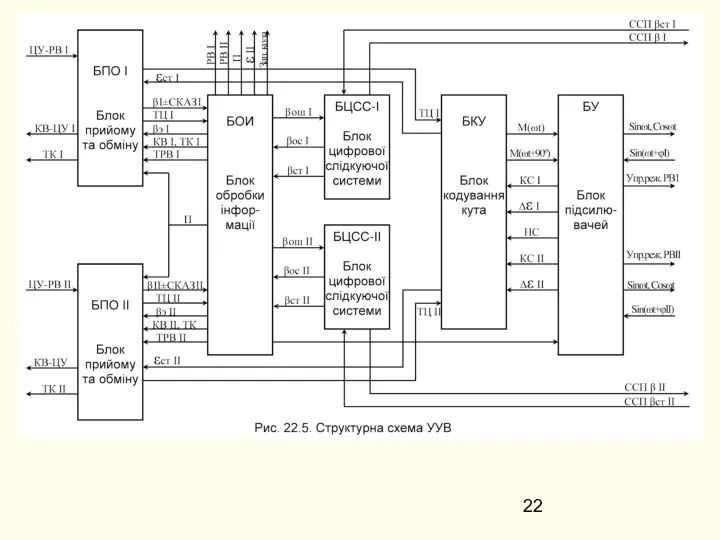
- 21. Блок прийому й обміну БПО призначений для прийому повідомлень ЦУ-РВ, збереження необхідної інформації і видачі повідомлень
- 23. Принцип роботи УУВ. При наявності інформації ЦУ для УУВ СВ-1 вступає в обмін з УУВ. До
- 24. Формувач сигналу помилки шляхом алгебраїчного додавання коду βє і коду азимута зворотного зв'язку βос формує 3-розрядний
- 26. Скачать презентацию
Устрій та бойове застосування КЗА 86Ж6
Тема №7: Апаратура обчислювальних засобів
Заняття №
Устрій та бойове застосування КЗА 86Ж6
Тема №7: Апаратура обчислювальних засобів
Заняття №
Навчальні питання
1. Принципи розв’язання задач вимірювання висоти в КЗА 86Ж6.
2. Призначення,
Навчальні питання
1. Принципи розв’язання задач вимірювання висоти в КЗА 86Ж6.
2. Призначення,
При розв’язанні задачі визначення висоти повітряних об’єктів, що супроводжуються в КЗА
При розв’язанні задачі визначення висоти повітряних об’єктів, що супроводжуються в КЗА
Якщо КТ-А належить РЛС ПРВ-17 в режимі кругового огляду, то аналізується
Якщо КТ-А належить РЛС ПРВ-17 в режимі кругового огляду, то аналізується
Для визначення висоти польоту ПО, які супроводжуються двохкоординатними станціями, використовується група
Для визначення висоти польоту ПО, які супроводжуються двохкоординатними станціями, використовується група
Рішення вказаної задачі виконується у наступній послідовності:
вибір РВ для вимірів кута
Рішення вказаної задачі виконується у наступній послідовності:
вибір РВ для вимірів кута
У першому випадку у формулярі технічного стану на БИВ РМ-5 несправний
У першому випадку у формулярі технічного стану на БИВ РМ-5 несправний
Вибір ПО на вимір кута місця робиться періодично, раз у 10 сек,
Вибір ПО на вимір кута місця робиться періодично, раз у 10 сек,
Інші ПО вибираються на вимір кута місця в порядку наступної пріоритетності:
ПО
Інші ПО вибираються на вимір кута місця в порядку наступної пріоритетності:
ПО
Одночасно біля системної контрольної точки на РМ-5 відображаються символи Ц1 (Ц2).
Одночасно біля системної контрольної точки на РМ-5 відображаються символи Ц1 (Ц2).
Повідомлення Т-РМ використовується в якості екстраполяційної точки, поруч з яким може
Повідомлення Т-РМ використовується в якості екстраполяційної точки, поруч з яким може
Повідомлення КТ-ОП, яке надійшло з РМ-5, аналізується на предмет коректності інформації,
Повідомлення КТ-ОП, яке надійшло з РМ-5, аналізується на предмет коректності інформації,
При надходженні повідомлення КТ-ОП з ознакою "Пропуск відлуння" ця ознака заноситься
При надходженні повідомлення КТ-ОП з ознакою "Пропуск відлуння" ця ознака заноситься
Пристрій керування висотомірами УУВ призначений для забезпечення автоматичного вивидення антенних систем
Пристрій керування висотомірами УУВ призначений для забезпечення автоматичного вивидення антенних систем
УУВ являє собою пристрій сполучення між спецобчислювачем СВ-1 і двома радіовисотомірами
УУВ являє собою пристрій сполучення між спецобчислювачем СВ-1 і двома радіовисотомірами

Отримані в повідомленнях ЦУ-РВ1 і ЦУ-РВ2 коди цілевказівок по β перетворюються
Отримані в повідомленнях ЦУ-РВ1 і ЦУ-РВ2 коди цілевказівок по β перетворюються

Від УУВ на РВ1 і РВ2 видаються синусоїдальні сигнали sinωt і
Від УУВ на РВ1 і РВ2 видаються синусоїдальні сигнали sinωt і
До складу УУВ входять наступні блоки:
2 блоки прийому й обміну
До складу УУВ входять наступні блоки:
2 блоки прийому й обміну
Блок прийому й обміну БПО призначений для прийому повідомлень ЦУ-РВ, збереження
Блок прийому й обміну БПО призначений для прийому повідомлень ЦУ-РВ, збереження
Принцип роботи УУВ.
При наявності інформації ЦУ для УУВ СВ-1 вступає
Принцип роботи УУВ.
При наявності інформації ЦУ для УУВ СВ-1 вступає
Формувач сигналу помилки шляхом алгебраїчного додавання коду βє і коду азимута
Формувач сигналу помилки шляхом алгебраїчного додавання коду βє і коду азимута
 Чертёжные инструменты, приборы, материалы и принадлежности
Чертёжные инструменты, приборы, материалы и принадлежности Ионные транспортеры и их роль в клетке
Ионные транспортеры и их роль в клетке ПРАВО ХОЗЯЙСТВЕННОГО ВЕДЕНИЯ И ОПЕРАТИВНОГО УПРАВЛЕНИЯ ИМУЩЕСТВОМ
ПРАВО ХОЗЯЙСТВЕННОГО ВЕДЕНИЯ И ОПЕРАТИВНОГО УПРАВЛЕНИЯ ИМУЩЕСТВОМ  Презентация____
Презентация____ Новые технологии в лечении повреждений печени
Новые технологии в лечении повреждений печени  Профориентационное занятие по курсу Г.В.Резапкиной Презентация подготовлена педагогом-психологом ГОУ ЦО № 771, г.Москвы ДЕТ
Профориентационное занятие по курсу Г.В.Резапкиной Презентация подготовлена педагогом-психологом ГОУ ЦО № 771, г.Москвы ДЕТ Объектноориентированное программирование Visual Basic
Объектноориентированное программирование Visual Basic О молитве
О молитве Сoncept «appearance» in Russian and Yakut linguocultures
Сoncept «appearance» in Russian and Yakut linguocultures Презентация Косточковые плоды и ягодные культуры
Презентация Косточковые плоды и ягодные культуры Презентация "Современная архитектура Москвы" - скачать презентации по МХК
Презентация "Современная архитектура Москвы" - скачать презентации по МХК Презентация на тему "Использование здоровьесберегающих технологий в начальной школе" - скачать презентации по Педагогике
Презентация на тему "Использование здоровьесберегающих технологий в начальной школе" - скачать презентации по Педагогике Технология оперативного температурно-прочностного контроля бетона при выдерживании конструкций при отрицательных температурах
Технология оперативного температурно-прочностного контроля бетона при выдерживании конструкций при отрицательных температурах Неделя семьи. Построение брака и семьи
Неделя семьи. Построение брака и семьи Джеффри Лайкер «Дао Toyota: 14 принципов менеджмента ведущей компании мира»
Джеффри Лайкер «Дао Toyota: 14 принципов менеджмента ведущей компании мира» Приемы деликатного сканирования. Tescan — сканирующие электронные микроскопы
Приемы деликатного сканирования. Tescan — сканирующие электронные микроскопы Структура видеоизображения
Структура видеоизображения Массивы. Работа с массивами
Массивы. Работа с массивами Лекция 7 Уравнение множественной регрессии Теорема Гаусса-Маркова Автор: Костюнин Владимир Ильич, доцент кафедры: «Математ
Лекция 7 Уравнение множественной регрессии Теорема Гаусса-Маркова Автор: Костюнин Владимир Ильич, доцент кафедры: «Математ мировая , всемирка
мировая , всемирка Моделирование и проектирование микросистемы сенсоров деформаций
Моделирование и проектирование микросистемы сенсоров деформаций Эмульситаторы и коллоидные мельницы
Эмульситаторы и коллоидные мельницы О чем рассказывают гербы и эмблемы
О чем рассказывают гербы и эмблемы Туризм. Корейские достопримечательности
Туризм. Корейские достопримечательности Внешний вид
Внешний вид Понятие потоков ввода/вывода
Понятие потоков ввода/вывода Трассы линейных сооружений
Трассы линейных сооружений Разработка по заказу дизайн-проекта в 3D редакторе
Разработка по заказу дизайн-проекта в 3D редакторе