- Архитектура ЭВМ

Содержание
- 2. Обобщённая структурная схема микроЭВМ БФ АК АЛУ РОН УУ ТГ Вы-вод Внутр. шина РК ПС СИ
- 3. Алгоритм функционирования ЭВМ Алгоритм отражает выполнение команд от момента включения до момента выключения. 1. Инициализация ЭВМ.
- 4. Процессор предназначен для обработки данных и управления режимами работы ЭВМ. Память предназначена для хранения программы и
- 5. Процессор (П) УУ (устройство управления) предназначено для управления П и ЭВМ в целом. Исходной информацией для
- 6. Выполнение команды в микроЭВМ Выполнения любой команды начинается с загрузки команды. Для загрузки команды процессор устанавливает
- 7. Структура микроЭВМ 1. Структура с раздельными шинами Система шин памяти (Ш..П) связывает процессор и память. Интерфейс
- 8. 2. Структура с изолированными шинами При такой структуре память и контроллеры внешних устройств (КВУ) связаны с
- 9. 3. Структура с изолированными шинами и мультиплексированием линии адрес-данные. В такой структуре используются различные наборы команд
- 10. 4. Структура с общими шинами В такой структуре имеется единое адресное пространство для памяти и внешнего
- 11. 5. Структура с общими шинами и мультиплексированием линии адрес-данные. При такой структуре имеется общее адресное пространство.
- 12. Классификация команд ЭВМ
- 13. 1. По функциональному назначению. 1.1. Команды передачи данных. Эти команды составляют примерно 70% от числа всех
- 14. 1) C (carry) – признак переноса, устанавливаемый в случае переноса 1 из старшего разряда регистра А
- 15. 1.2.2. Команды логической обработки данных. ANA B – содержимое регистра В подвергается логическому И с содержимым
- 16. 1.3. Команды передачи управления. Команды передачи управления бывают условные и безусловные. Условные команды используют признаки слова
- 17. Для сохранения адреса возврата служит стек. Стек – это область оперативной памяти, доступ к которой организован
- 18. 2.1. Одноадресные команды. Здесь имеется указание на один операнд, например: INR B – инкрементировать В (увеличить
- 19. б)Двухбайтные команды. К ним относится команда MVI B, const (передать непосредственно следующие данные в В). Здесь
- 20. В данном примере константа В4 записывается а регистр В. Сначала программный счетчик PS указывает на код
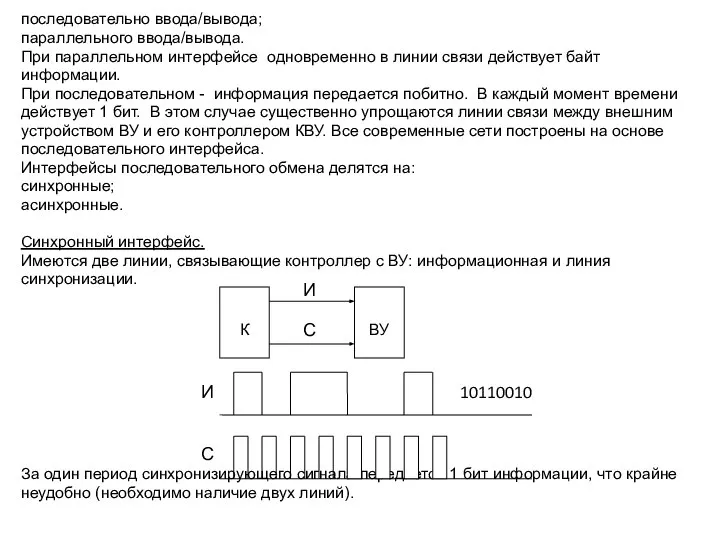
- 21. последовательно ввода/вывода; параллельного ввода/вывода. При параллельном интерфейсе одновременно в линии связи действует байт информации. При последовательном
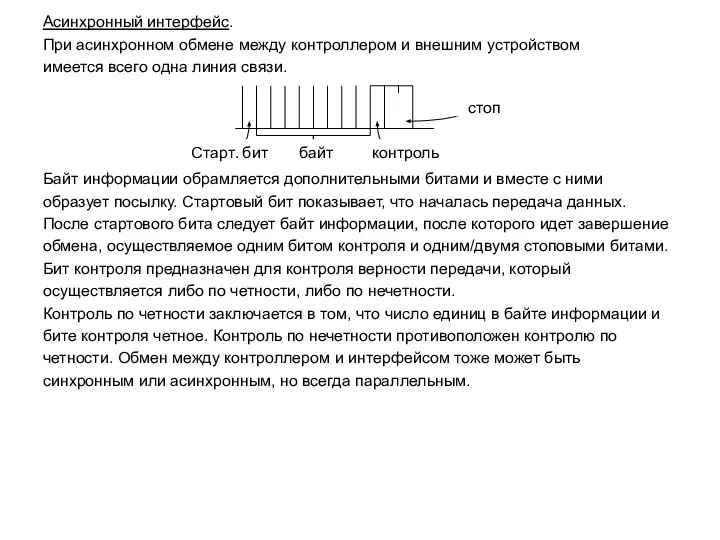
- 22. Асинхронный интерфейс. При асинхронном обмене между контроллером и внешним устройством имеется всего одна линия связи. Байт
- 23. По способу размещения контроллеры делятся на: А) Контроллеры, выполненные на одной плате с процессором; Недостатком такого
- 24. Типовая структурная схема КВУ. КВУ включает в себя следующие основные узлы: приемопередатчики шины данных ШД; приемопередатчики
- 25. Алгоритм асинхронного обмена СИ с контроллером. Обмен данными может осуществляться в 2-ух режимах: синхронном (данные вводятся/выводятся
- 26. Контроллер параллельного ввода. Контроллер предназначен для ввода байта данных от ВУ в СИ. При этом решается
- 27. Синхронизация ВУ и контроллера. Для решения этой задачи ВУ должно функционировать по следующему алгоритму: ВУ анализирует
- 28. Синхронизация СИ с контроллером. Синхронизация производится по алгоритму опроса готовности (см. выше). Внутренняя часть контроллера параллельного
- 29. Контроллер параллельного вывода. Этот контроллер предназначен для вывода байта данных из СИ во ВУ. При этом
- 30. Алгоритм синхронизации ВУ и контроллера представлен на следующем рисунке Синхронизация СИ и контроллера производится по следующему
- 31. Между СИ и контроллером осуществляется асинхронный обмен, т.е. процессор опрашивает РС (готовность контроллера). Если контроллер готов,
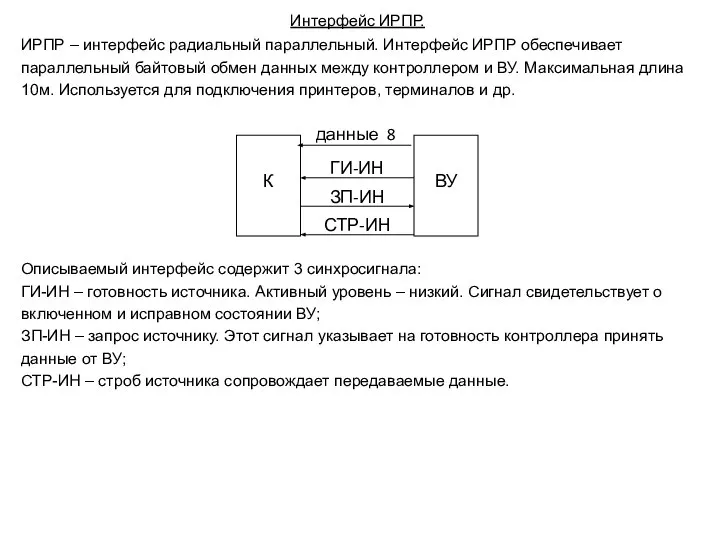
- 32. Интерфейс ИРПР. ИРПР – интерфейс радиальный параллельный. Интерфейс ИРПР обеспечивает параллельный байтовый обмен данных между контроллером
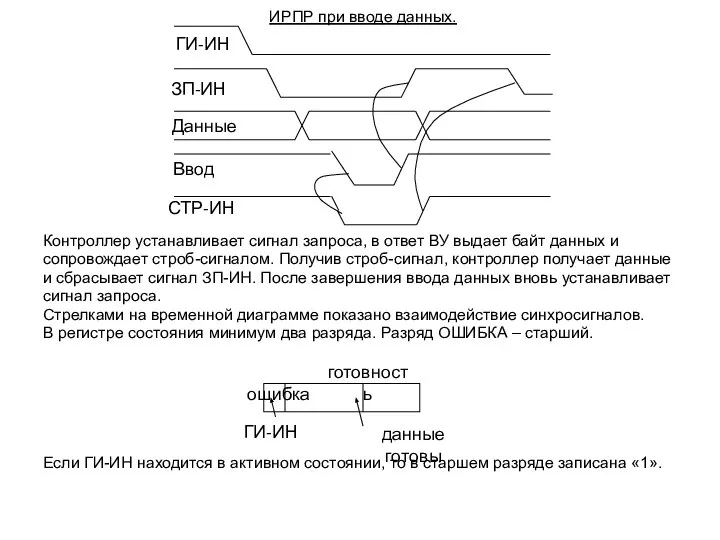
- 33. ИРПР при вводе данных. Контроллер устанавливает сигнал запроса, в ответ ВУ выдает байт данных и сопровождает
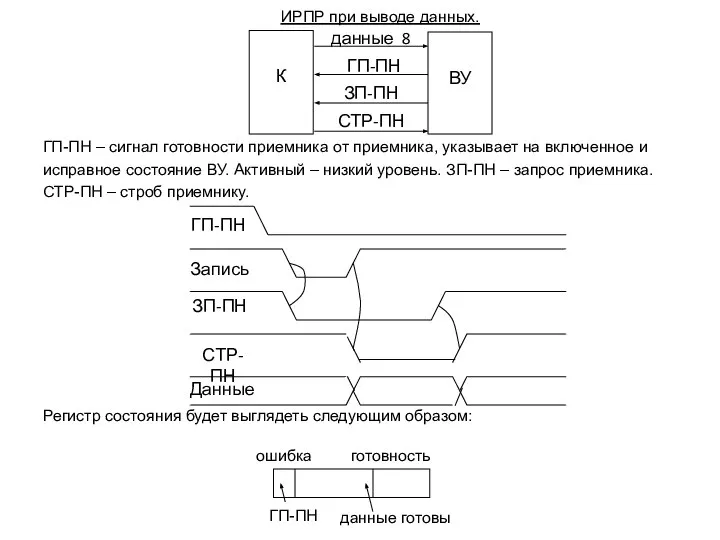
- 34. ИРПР при выводе данных. ГП-ПН – сигнал готовности приемника от приемника, указывает на включенное и исправное
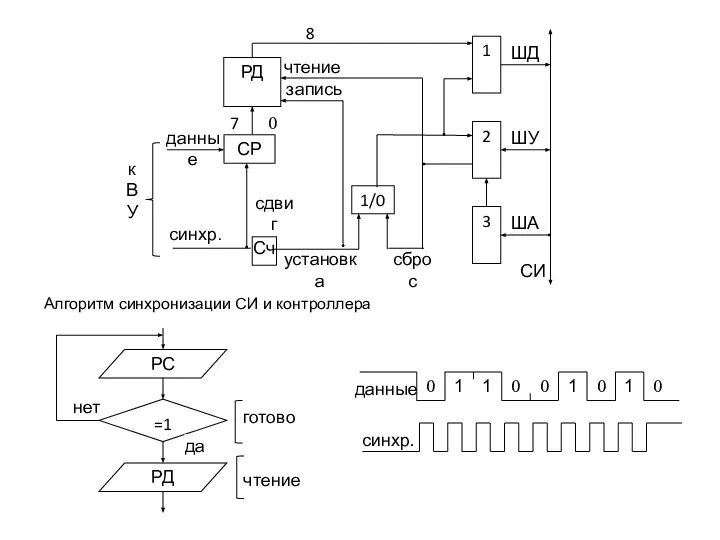
- 35. Последовательный ввод-вывод. Последовательный обмен может быть синхронным и асинхронным. Синхронный обмен. Контроллер последовательного синхронного приёма. Контроллер
- 36. Алгоритм синхронизации СИ и контроллера 1 2 3 РД СР Сч 1/0 установка сброс ШУ СИ
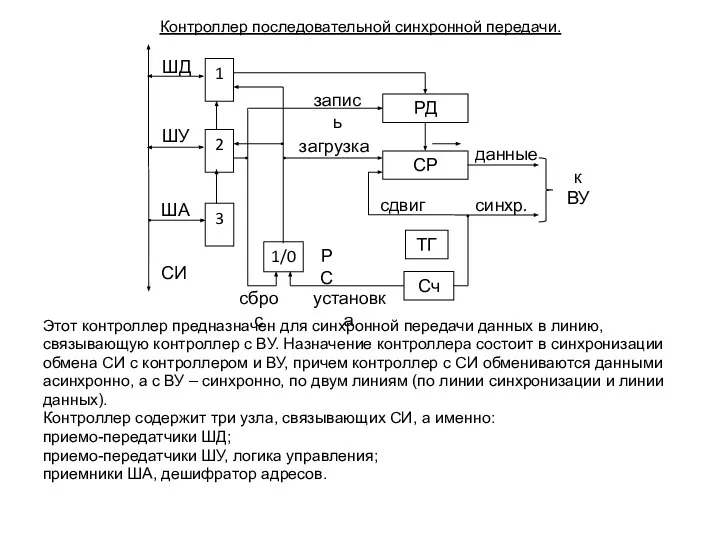
- 37. Контроллер последовательной синхронной передачи. Этот контроллер предназначен для синхронной передачи данных в линию, связывающую контроллер с
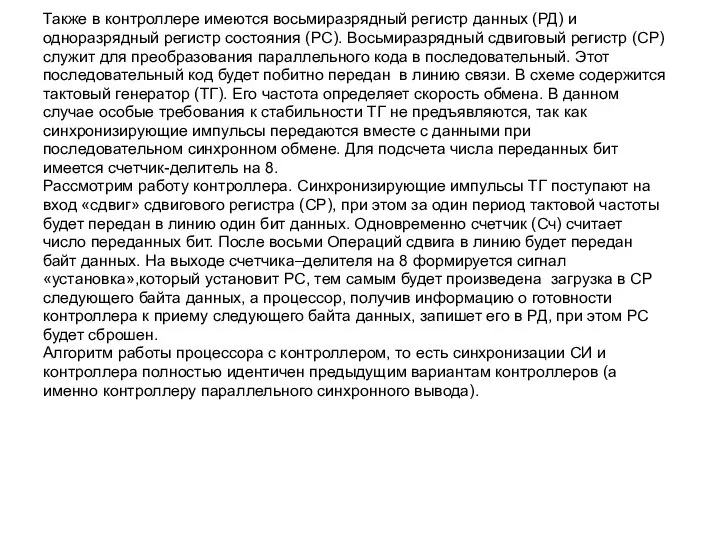
- 38. Также в контроллере имеются восьмиразрядный регистр данных (РД) и одноразрядный регистр состояния (РС). Восьмиразрядный сдвиговый регистр
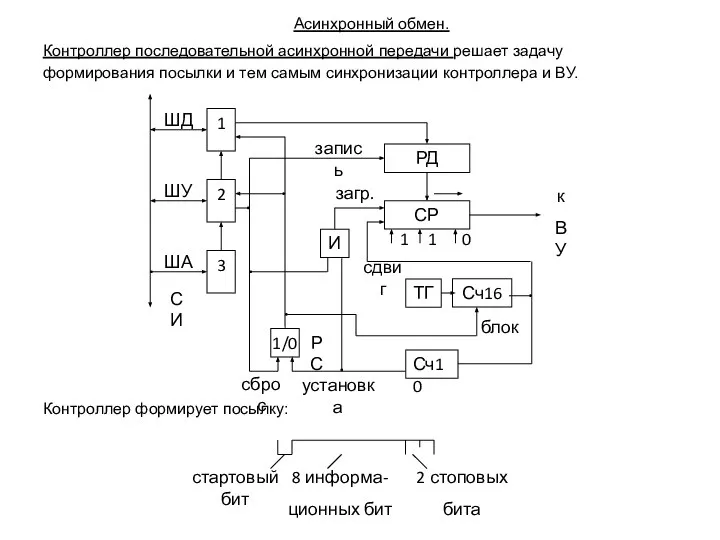
- 39. Асинхронный обмен. Контроллер последовательной асинхронной передачи решает задачу формирования посылки и тем самым синхронизации контроллера и
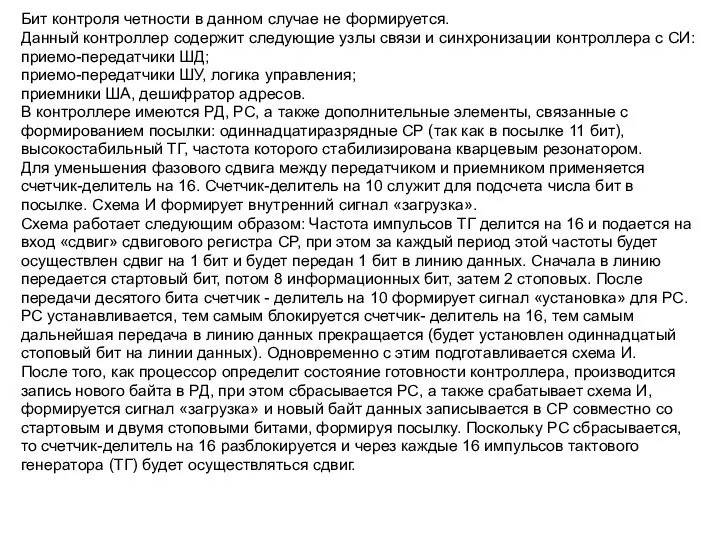
- 40. Бит контроля четности в данном случае не формируется. Данный контроллер содержит следующие узлы связи и синхронизации
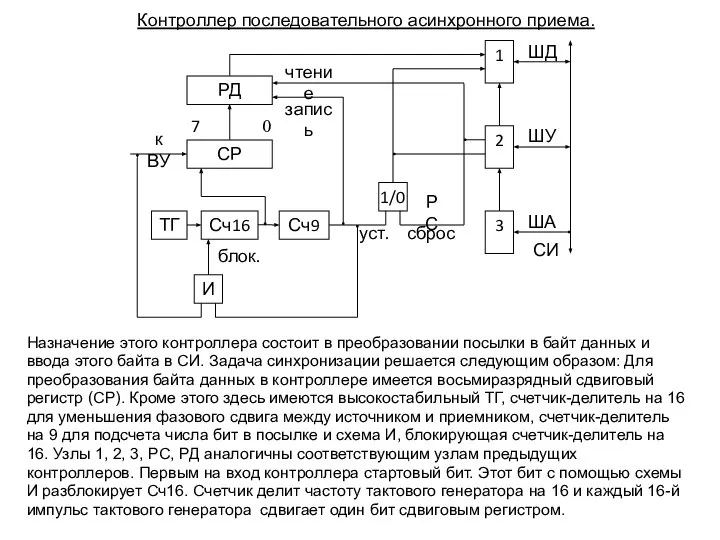
- 41. Контроллер последовательного асинхронного приема. Назначение этого контроллера состоит в преобразовании посылки в байт данных и ввода
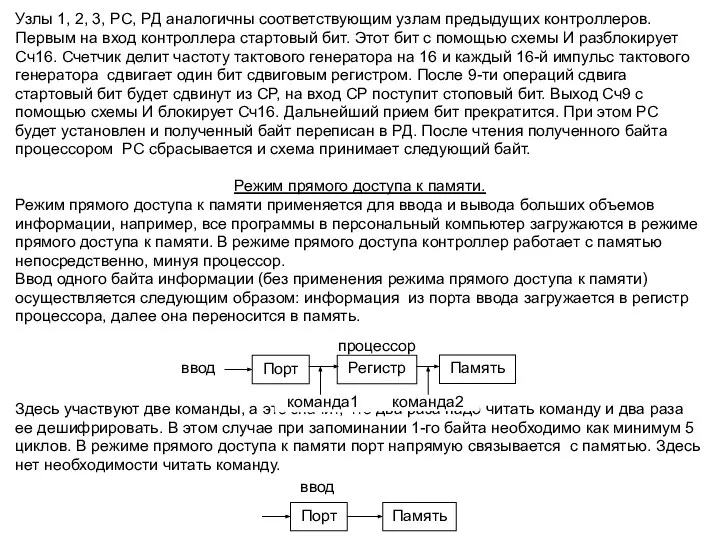
- 42. Узлы 1, 2, 3, РС, РД аналогичны соответствующим узлам предыдущих контроллеров. Первым на вход контроллера стартовый
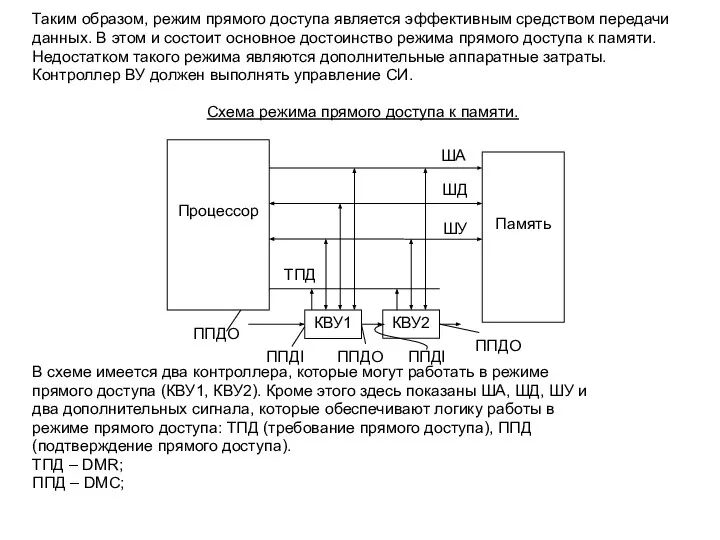
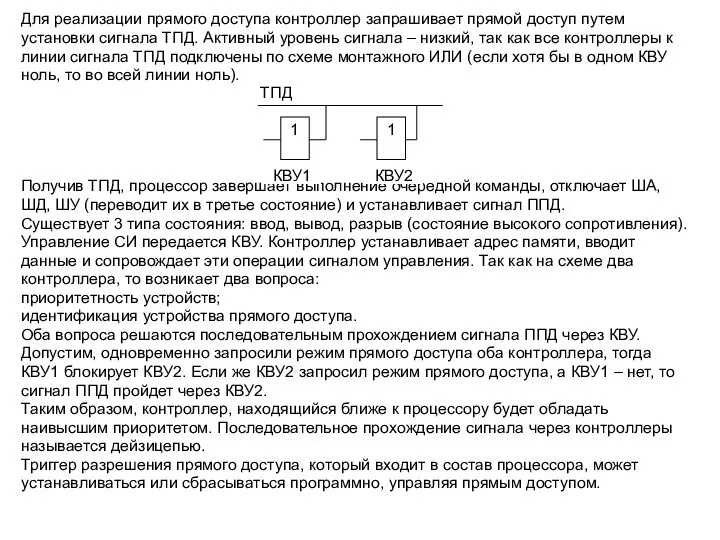
- 43. Таким образом, режим прямого доступа является эффективным средством передачи данных. В этом и состоит основное достоинство
- 44. Для реализации прямого доступа контроллер запрашивает прямой доступ путем установки сигнала ТПД. Активный уровень сигнала –
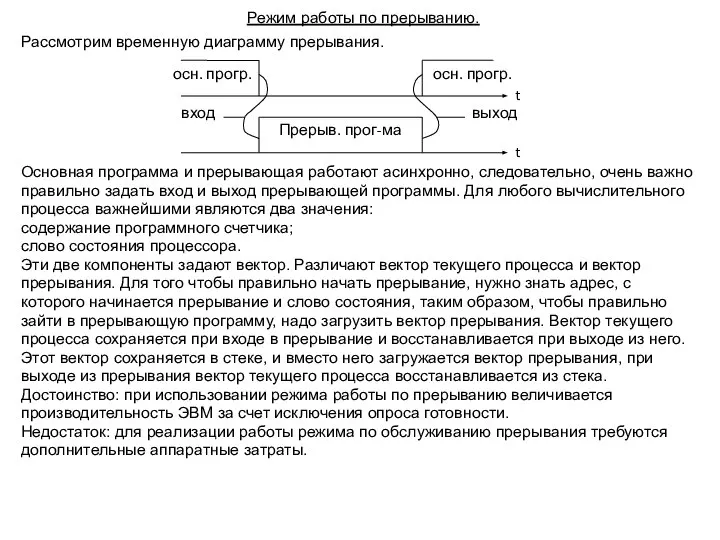
- 45. Режим работы по прерыванию. Рассмотрим временную диаграмму прерывания. Основная программа и прерывающая работают асинхронно, следовательно, очень
- 46. Приоритеты прерывания. Прерывания подразделяются на внутренние и внешние. Внутренние прерывания контролируют внутренние события вычислительной машины. Внешние
- 47. Схема программного полинга Под полингом понимаются определение приоритета прерывания и идентификация. Рассмотрим два контроллера, которые работают
- 48. Этот алгоритм включает: Сохранение в стеке внутренних регистров процессора, проверка готовности КВУ1, КВУ2; Обработка прерывания КВУ1;
- 49. Схема аппаратного полинга. Здесь задача полинга решается аппаратно. Рассмотрим, как осуществляется выдача адреса вектора прерывания (АВП).
- 50. Схема контроллера в режиме выдачи АВП. 1) приемо-передатчики ШД; 2) приемо-передатчики ШУ; 3) приемо-передатчики ША, дешифратор
- 51. Ситуация прерывания возникает в контроллере в случае, если прерывания разрешены и данные готовы. С помощью схемы
- 52. М – мультиплексор, обеспечивающий считывание сразу с нескольких запоминающих элементов. УУ – узел управления. ДШ1 и
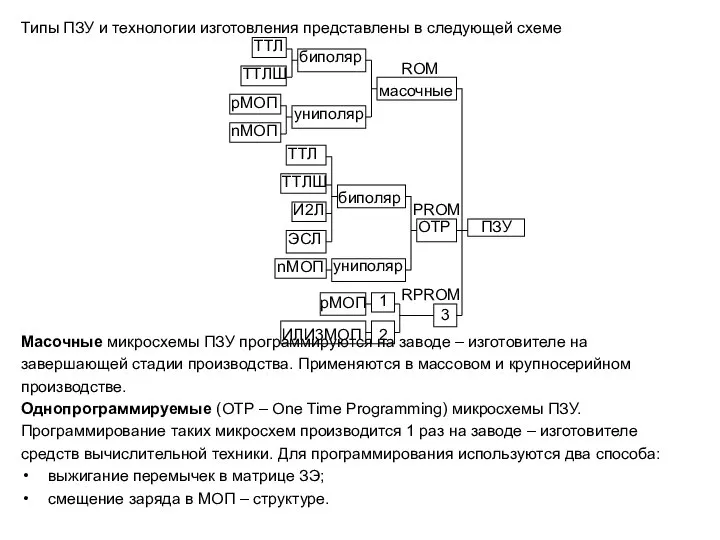
- 53. Типы ПЗУ и технологии изготовления представлены в следующей схеме Масочные микросхемы ПЗУ программируются на заводе –
- 54. ОТР применяются в серийном и массовом производстве. Перепрограммируемые микросхемы ПЗУ. Такие микросхемы позволяют многократно стирать и
- 55. Принцип записи и хранения в МОП – структуре. МОП – металл, окисел, полупроводник. В область затвора
- 56. Способ записи и хранения информации путем выжигания перемычек. В схеме имеется перемычка из материала высокого сопротивления
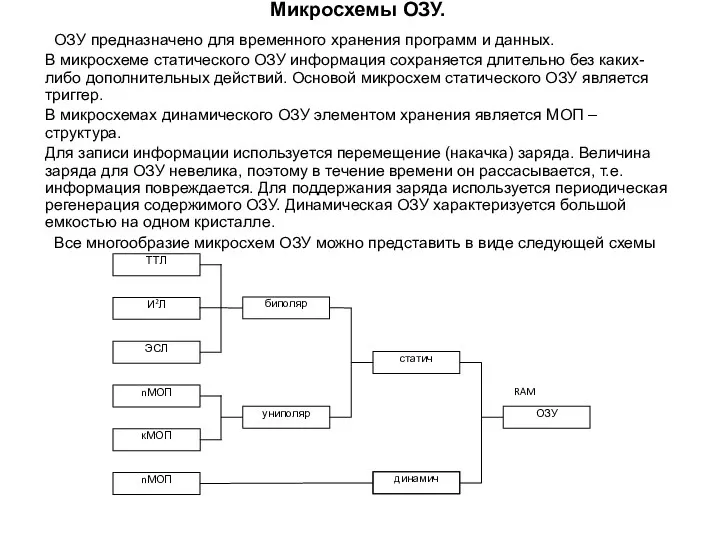
- 57. Микросхемы ОЗУ. ОЗУ предназначено для временного хранения программ и данных. В микросхеме статического ОЗУ информация сохраняется
- 58. Структура микросхемы статической ОЗУ на примере МС КР537РУ10 емкостью 2048×8 бит. Типовым элементом хранения является триггер
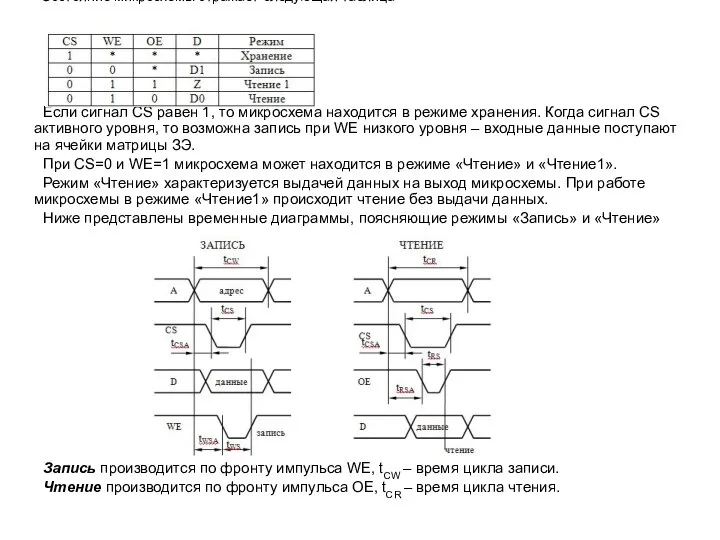
- 59. Состояние микросхемы отражает следующая таблица Если сигнал CS равен 1, то микросхема находится в режиме хранения.
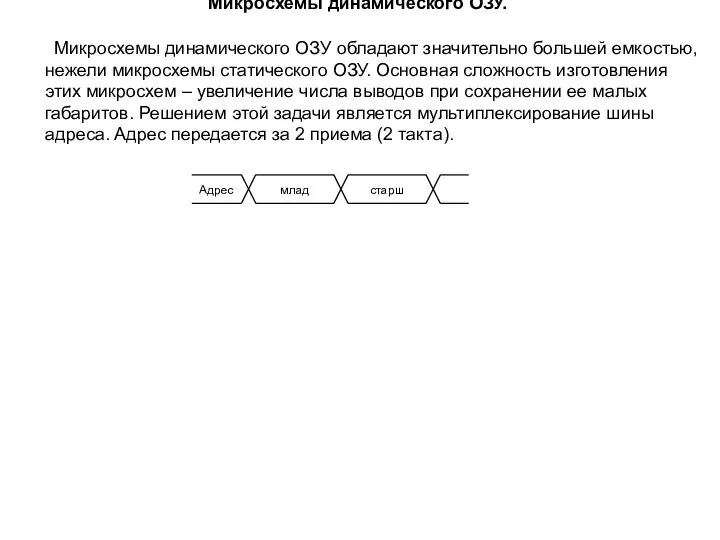
- 60. Микросхемы динамического ОЗУ. Микросхемы динамического ОЗУ обладают значительно большей емкостью, нежели микросхемы статического ОЗУ. Основная сложность
- 61. В качестве примера динамического ОЗУ рассмотрим микросхему КР565РУ5 объемом 64×1кбай Основа микросхемы – матрица ЗЭ. Организация
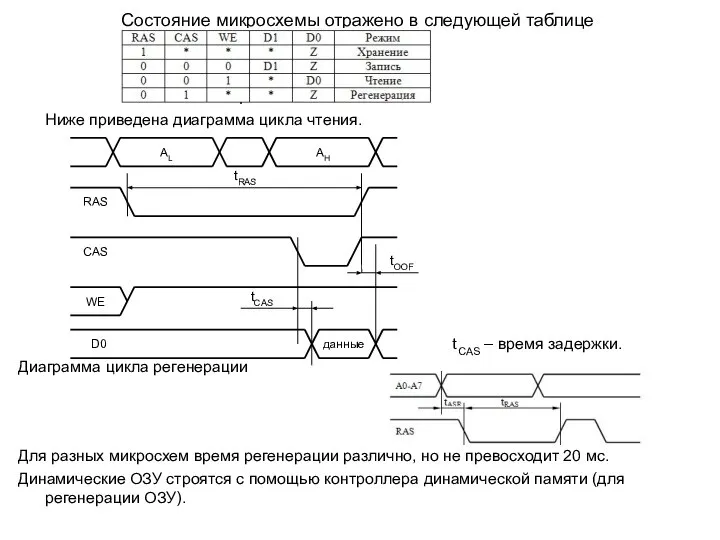
- 62. Состояние микросхемы отражено в следующей таблице Ниже приведена диаграмма цикла чтения. tCAS – время задержки. Диаграмма
- 63. Контроллеры динамического ОЗУ. Контроллеры динамического ОЗУ можно классифицировать следующим образом: 1. Контроллеры асинхронной регенерации. Процесс регенерации
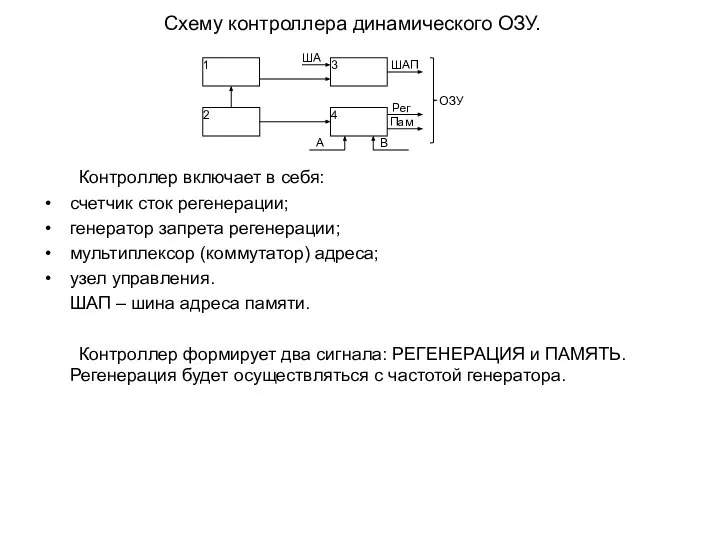
- 64. Схему контроллера динамического ОЗУ. Контроллер включает в себя: счетчик сток регенерации; генератор запрета регенерации; мультиплексор (коммутатор)
- 65. Наращивание объемов памяти. Задача наращивания объемов памяти возникает в двух случаях: когда емкости одной микросхемы памяти
- 66. Пример наращивания как по числу разрядов, так и по числу адресов. На схеме: приемо-передатчики ШД; передатчики
- 67. Объединение ОЗУ и ПЗУ в единое адресное пространство. Для управляющих ЭВМ характерен большой объем ПЗУ и
- 68. Страничная организация памяти. Применяется в том случае, когда объем адресного пространства превышает адрес, записанный в команде.
- 69. Микроконтроллеры. Средства вычислительной техники (СВТ) используются для управления и для вычислений. ОЭМ – однокристальные микро-ЭВМ (отечественное
- 70. Наибольшее распространение получили микроконтроллеры с системой команд 51-го кристалла. Условно это семейство микроконтроллеров называют MCS-51. Базовая
- 71. Усовершенствованный микропроцессор С517 имеет следующие отличия: АЦП (ADS); устройство быстрой арифметики с высокой разрядностью; увеличенное число
- 72. Семейство микроконтроллеров MSC-51. Организация памяти. Для микроконтроллеров семейства MSC-51 характерна структура с раздельной памятью программ и
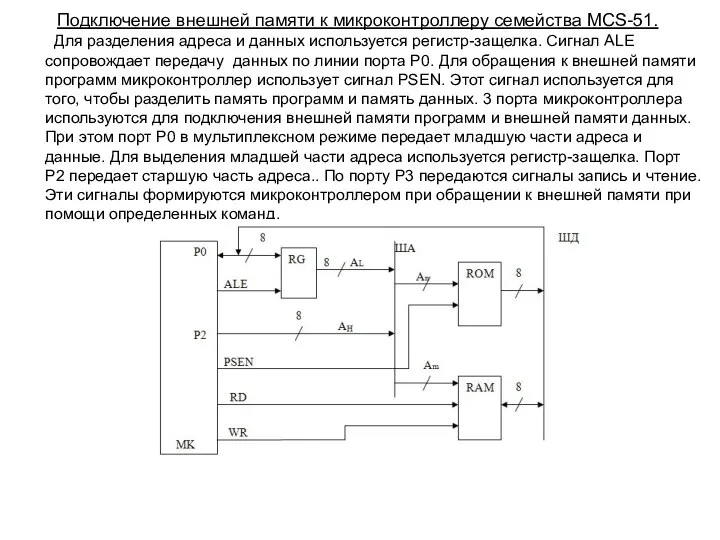
- 73. Подключение внешней памяти к микроконтроллеру семейства MCS-51. Для разделения адреса и данных используется регистр-защелка. Сигнал ALE
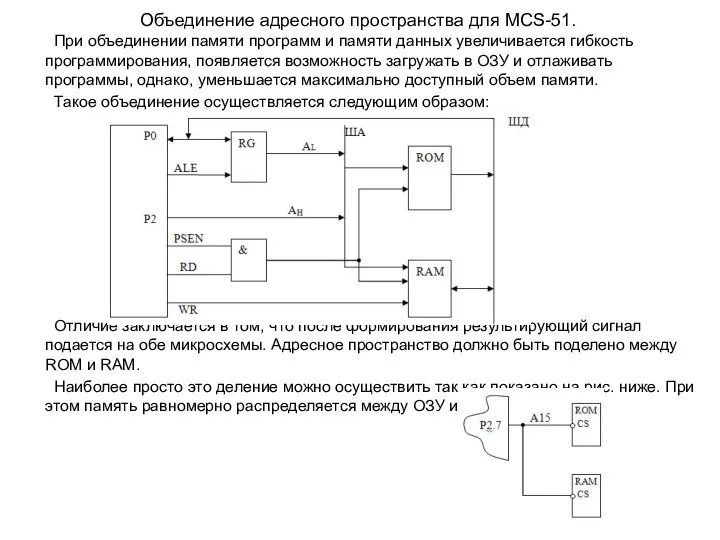
- 74. Объединение адресного пространства для MCS-51. При объединении памяти программ и памяти данных увеличивается гибкость программирования, появляется
- 75. Структурная схема микроконтроллера семейства MCS-51. Рассмотрим структурную схему микроконтроллера AT89S8252 фирмы «Atmel». Микроконтроллер имеет встроенную Flash-память,
- 76. А – узел прерываний. В микроконтроллере имеются два прерывания, которые могут маскироваться. Также имеются два таймера-счетчика,
- 77. Структурная схема микроконтроллера AT89S8252 фирмы «Atmel».
- 78. Временные диаграммы работы контроллера с внешней памятью. Временные диаграммы чтения внешней памяти программ: Сигнал ALE сопровождает
- 80. Скачать презентацию
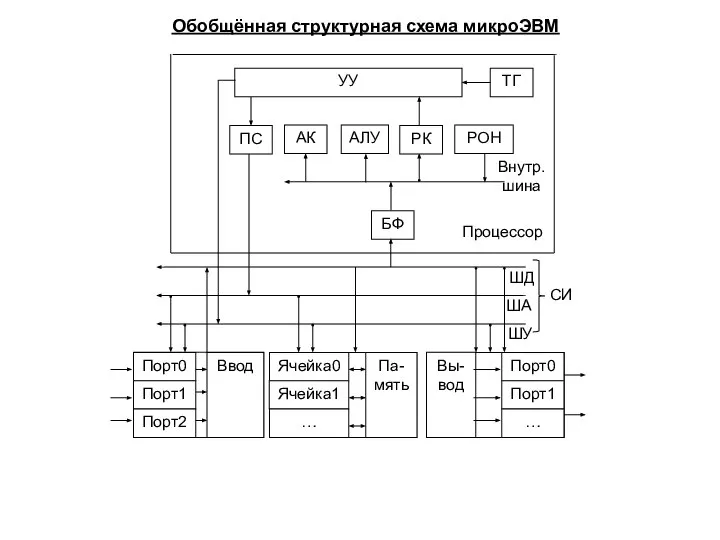
Обобщённая структурная схема микроЭВМ
БФ
АК
АЛУ
РОН
УУ
ТГ
Вы-вод
Внутр. шина
РК
ПС
СИ
ША
ШД
ШУ
Процессор
Ввод
Порт0
Порт1
Порт2
Ячейка0
Ячейка1
…
Па-мять
Порт0
Порт1
…
Обобщённая структурная схема микроЭВМ
БФ
АК
АЛУ
РОН
УУ
ТГ
Вы-вод
Внутр. шина
РК
ПС
СИ
ША
ШД
ШУ
Процессор
Ввод
Порт0
Порт1
Порт2
Ячейка0
Ячейка1
…
Па-мять
Порт0
Порт1
…

Алгоритм функционирования ЭВМ
Алгоритм отражает выполнение команд от момента
включения до момента
Алгоритм функционирования ЭВМ
Алгоритм отражает выполнение команд от момента
включения до момента
Процессор предназначен для обработки данных и управления режимами работы ЭВМ.
Память предназначена
Процессор предназначен для обработки данных и управления режимами работы ЭВМ.
Память предназначена
Процессор (П)
УУ (устройство управления) предназначено для управления П и ЭВМ в
Процессор (П)
УУ (устройство управления) предназначено для управления П и ЭВМ в
Выполнение команды в микроЭВМ
Выполнения любой команды начинается с загрузки команды. Для
Выполнение команды в микроЭВМ
Выполнения любой команды начинается с загрузки команды. Для
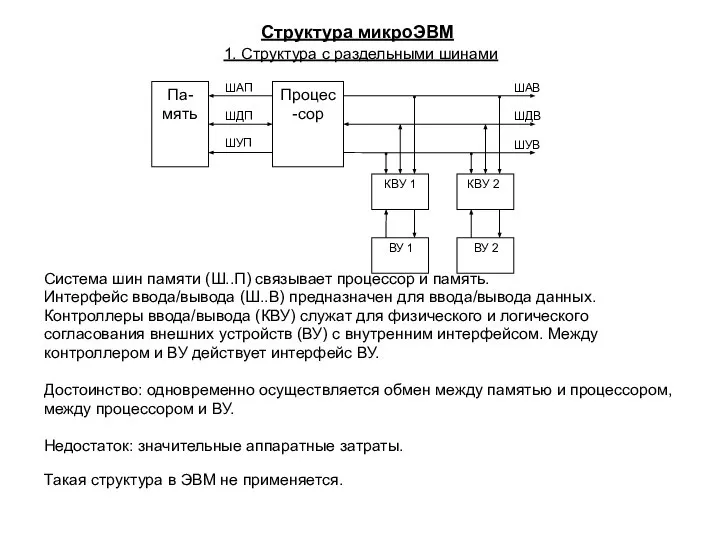
Структура микроЭВМ
1. Структура с раздельными шинами
Система шин памяти (Ш..П) связывает процессор
Структура микроЭВМ
1. Структура с раздельными шинами
Система шин памяти (Ш..П) связывает процессор
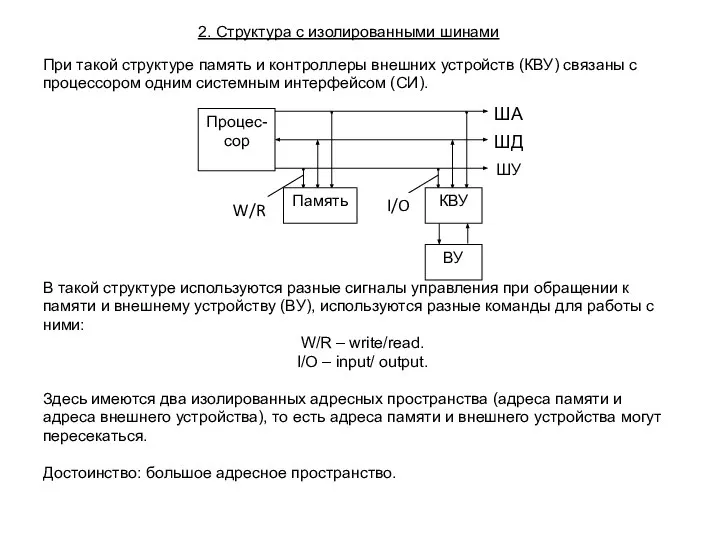
2. Структура с изолированными шинами
При такой структуре память и контроллеры внешних
2. Структура с изолированными шинами
При такой структуре память и контроллеры внешних
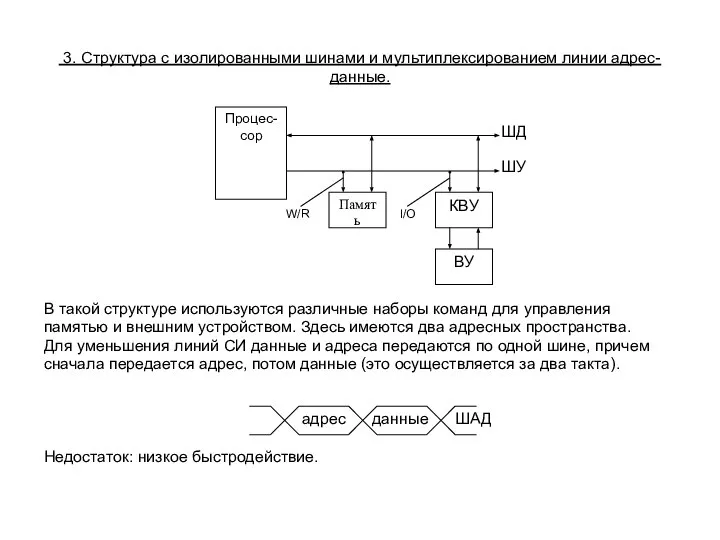
3. Структура с изолированными шинами и мультиплексированием линии адрес-данные.
В такой
3. Структура с изолированными шинами и мультиплексированием линии адрес-данные.
В такой
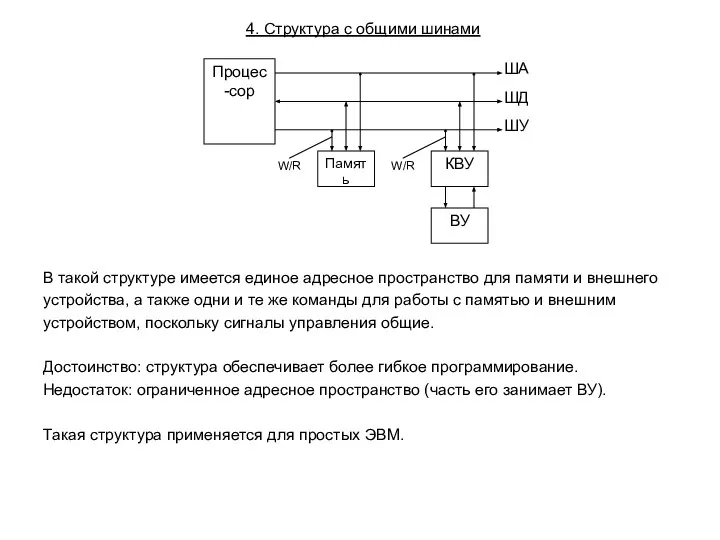
4. Структура с общими шинами
В такой структуре имеется единое адресное пространство
4. Структура с общими шинами
В такой структуре имеется единое адресное пространство
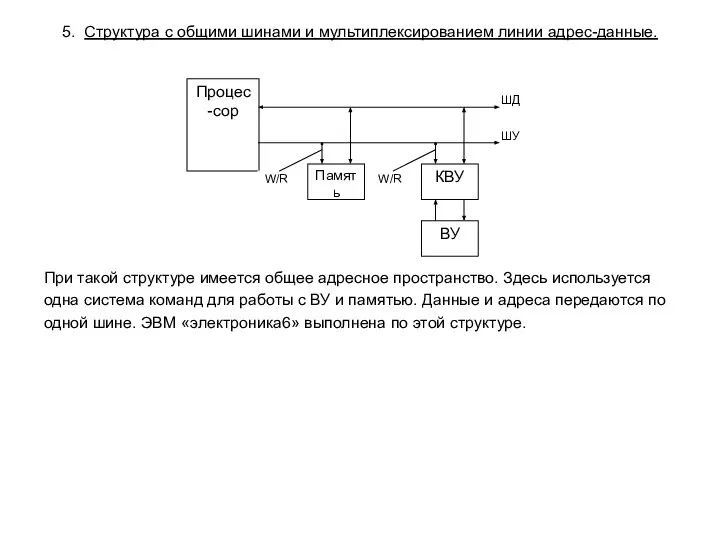
5. Структура с общими шинами и мультиплексированием линии адрес-данные.
При такой структуре
5. Структура с общими шинами и мультиплексированием линии адрес-данные.
При такой структуре
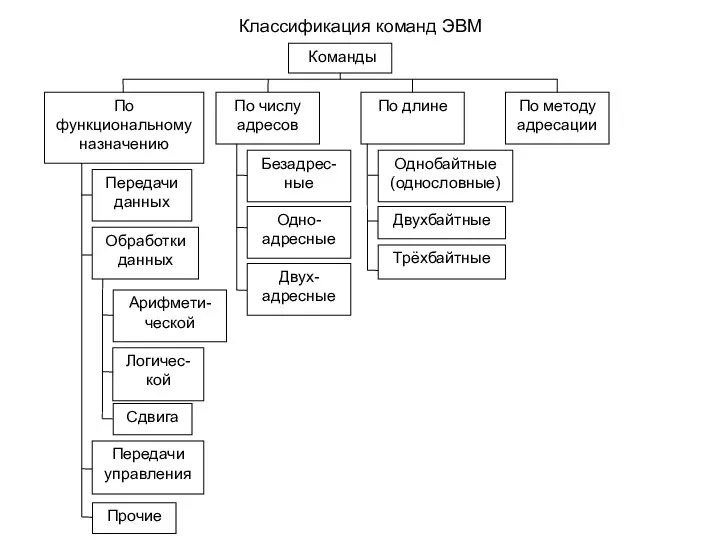
Классификация команд ЭВМ
Классификация команд ЭВМ
1. По функциональному назначению.
1.1. Команды передачи данных.
Эти команды составляют примерно
1. По функциональному назначению.
1.1. Команды передачи данных.
Эти команды составляют примерно
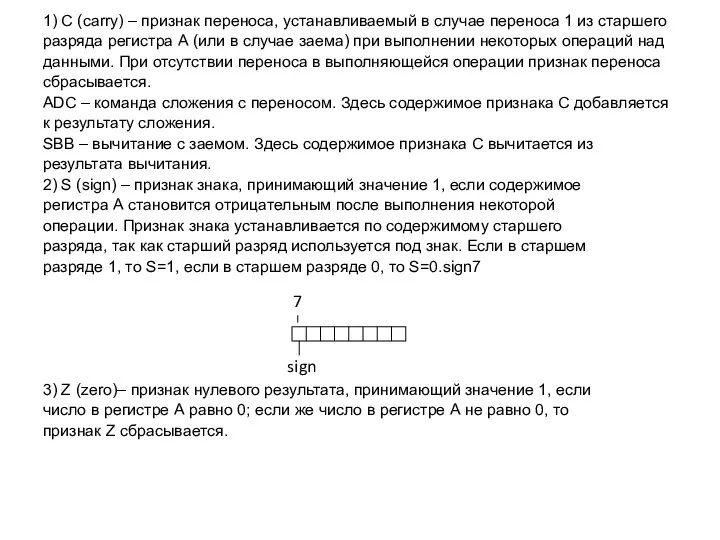
1) C (carry) – признак переноса, устанавливаемый в случае переноса 1
1) C (carry) – признак переноса, устанавливаемый в случае переноса 1
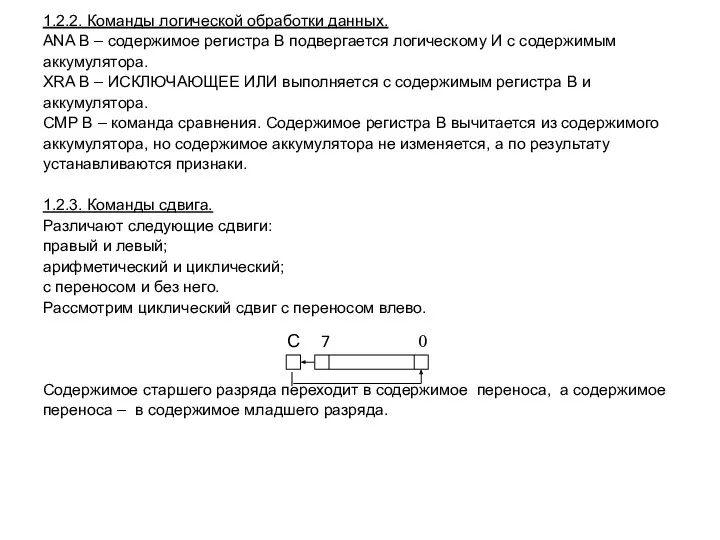
1.2.2. Команды логической обработки данных.
ANA B – содержимое регистра В подвергается
1.2.2. Команды логической обработки данных.
ANA B – содержимое регистра В подвергается
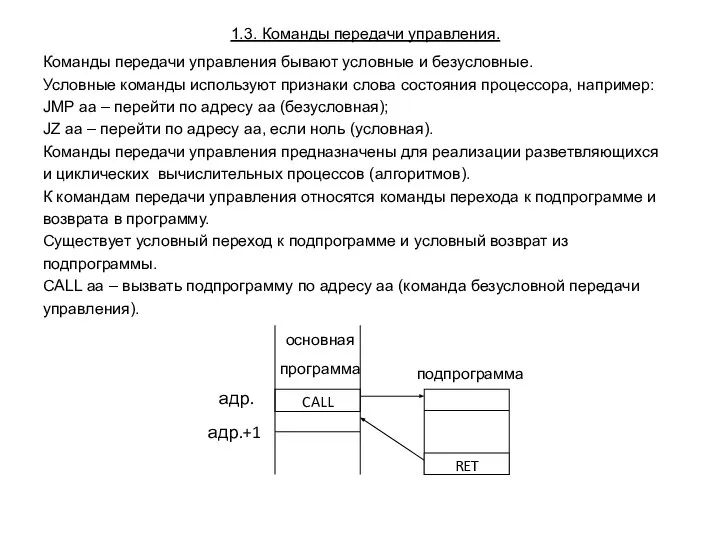
1.3. Команды передачи управления.
Команды передачи управления бывают условные и
1.3. Команды передачи управления.
Команды передачи управления бывают условные и
Для сохранения адреса возврата служит стек. Стек – это область
оперативной
Для сохранения адреса возврата служит стек. Стек – это область
оперативной
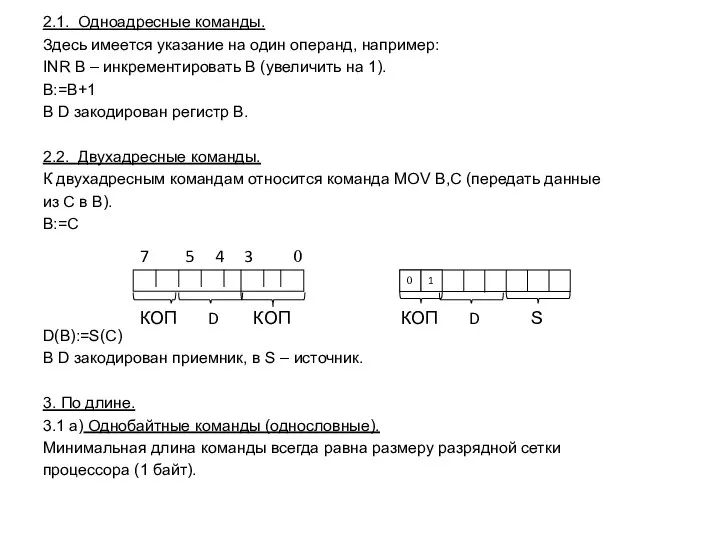
2.1. Одноадресные команды.
Здесь имеется указание на один операнд, например:
INR B –
2.1. Одноадресные команды.
Здесь имеется указание на один операнд, например:
INR B –
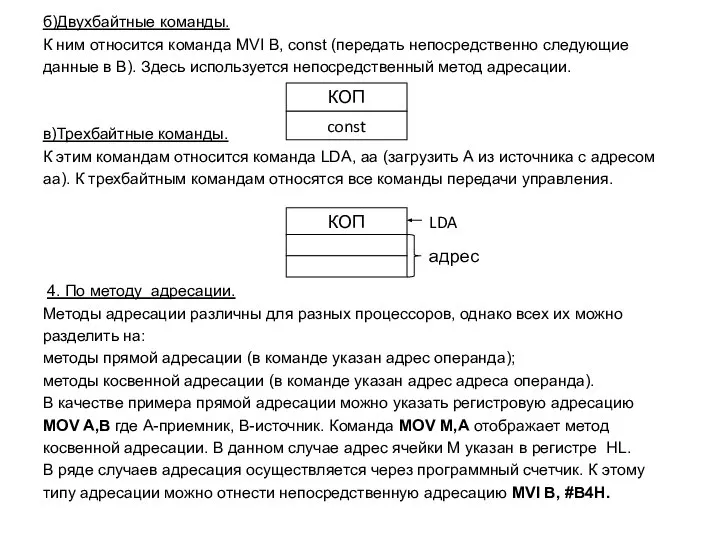
б)Двухбайтные команды.
К ним относится команда MVI B, const (передать непосредственно следующие
б)Двухбайтные команды.
К ним относится команда MVI B, const (передать непосредственно следующие
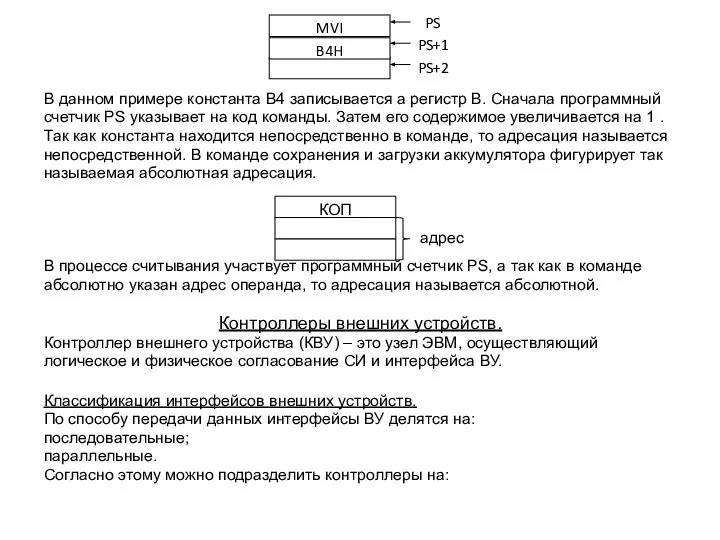
В данном примере константа В4 записывается а регистр В. Сначала программный
В данном примере константа В4 записывается а регистр В. Сначала программный
последовательно ввода/вывода;
параллельного ввода/вывода.
При параллельном интерфейсе одновременно в линии связи действует байт
последовательно ввода/вывода;
параллельного ввода/вывода.
При параллельном интерфейсе одновременно в линии связи действует байт
Асинхронный интерфейс.
При асинхронном обмене между контроллером и внешним устройством
имеется всего
Асинхронный интерфейс.
При асинхронном обмене между контроллером и внешним устройством
имеется всего
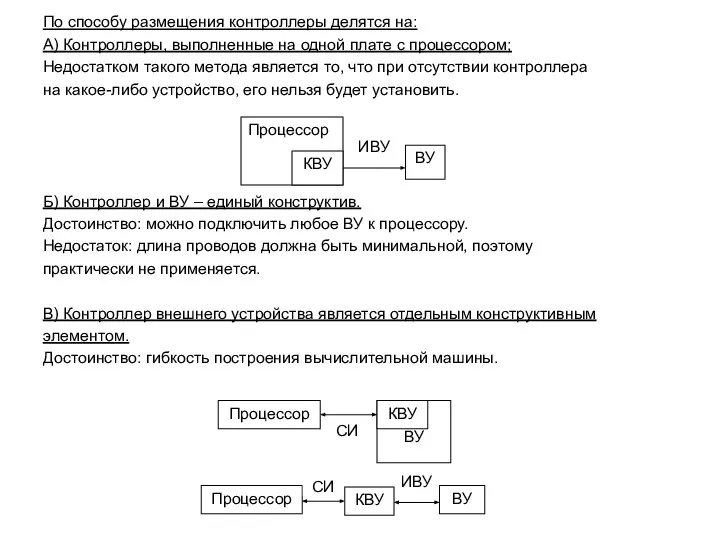
По способу размещения контроллеры делятся на:
А) Контроллеры, выполненные на одной плате
По способу размещения контроллеры делятся на:
А) Контроллеры, выполненные на одной плате
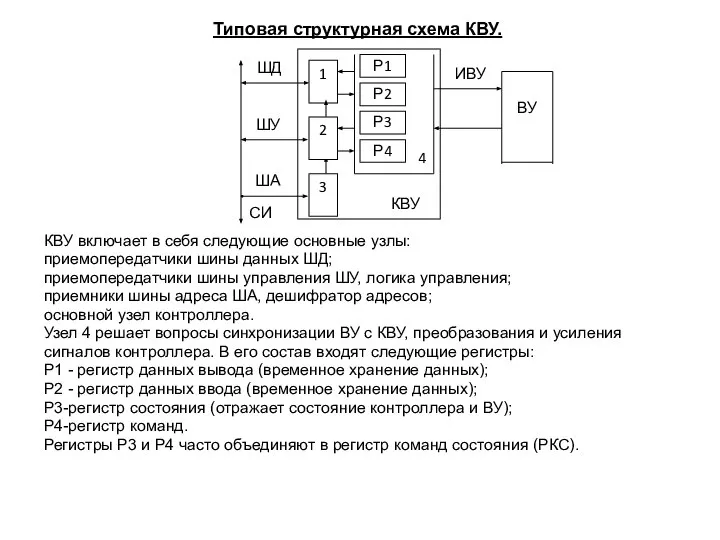
Типовая структурная схема КВУ.
КВУ включает в себя следующие основные узлы:
приемопередатчики шины
Типовая структурная схема КВУ.
КВУ включает в себя следующие основные узлы:
приемопередатчики шины
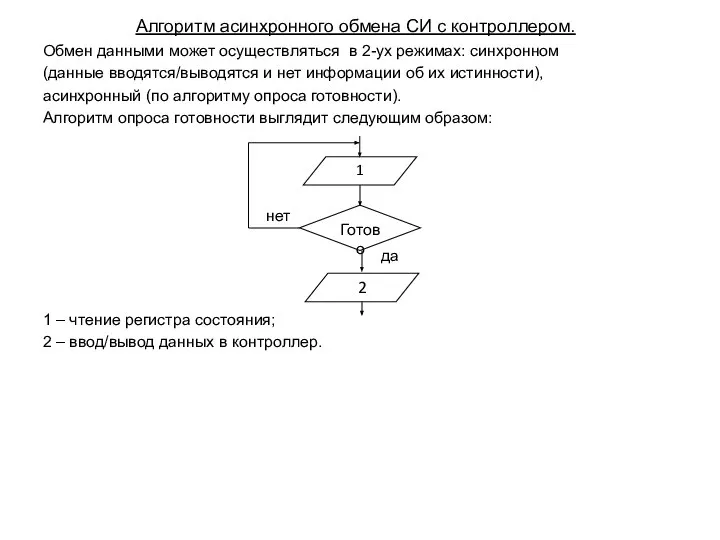
Алгоритм асинхронного обмена СИ с контроллером.
Обмен данными может осуществляться в 2-ух
Алгоритм асинхронного обмена СИ с контроллером.
Обмен данными может осуществляться в 2-ух
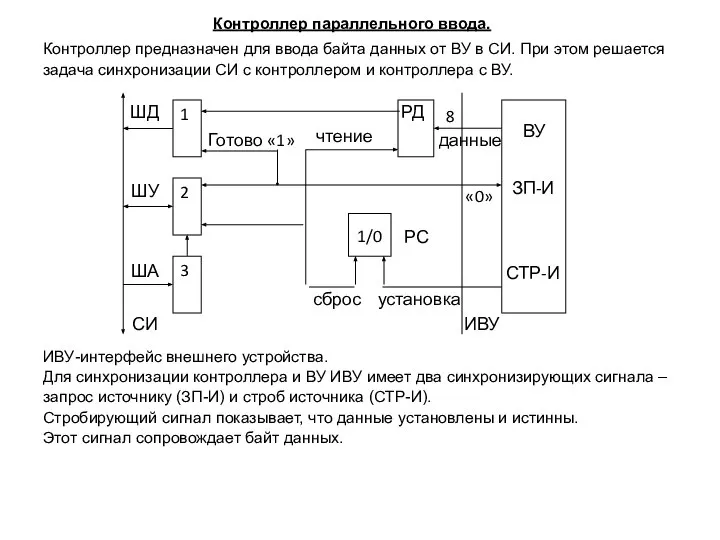
Контроллер параллельного ввода.
Контроллер предназначен для ввода байта данных от ВУ в
Контроллер параллельного ввода.
Контроллер предназначен для ввода байта данных от ВУ в
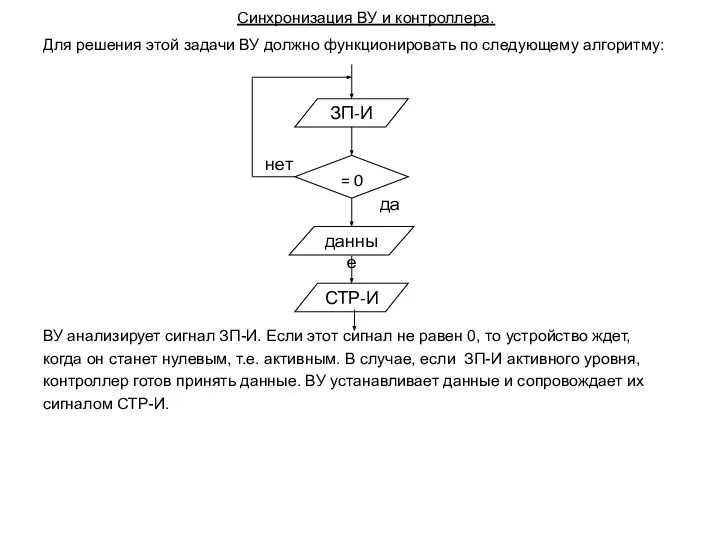
Синхронизация ВУ и контроллера.
Для решения этой задачи ВУ должно функционировать по
Синхронизация ВУ и контроллера.
Для решения этой задачи ВУ должно функционировать по
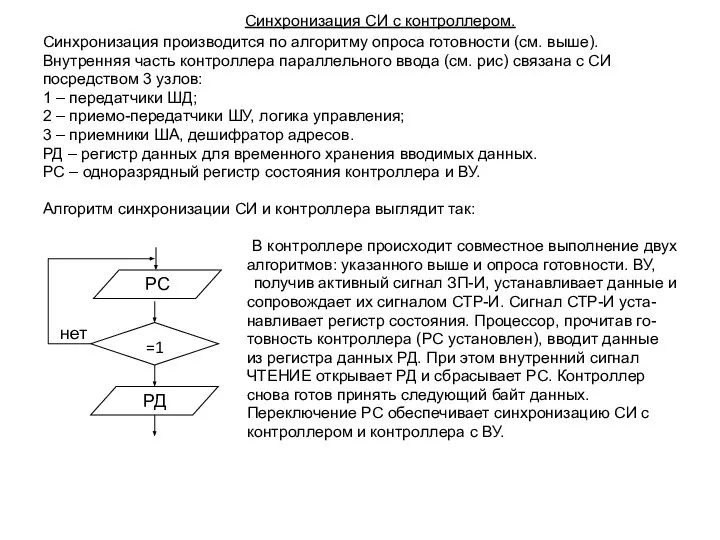
Синхронизация СИ с контроллером.
Синхронизация производится по алгоритму опроса готовности (см. выше).
Внутренняя
Синхронизация СИ с контроллером.
Синхронизация производится по алгоритму опроса готовности (см. выше).
Внутренняя
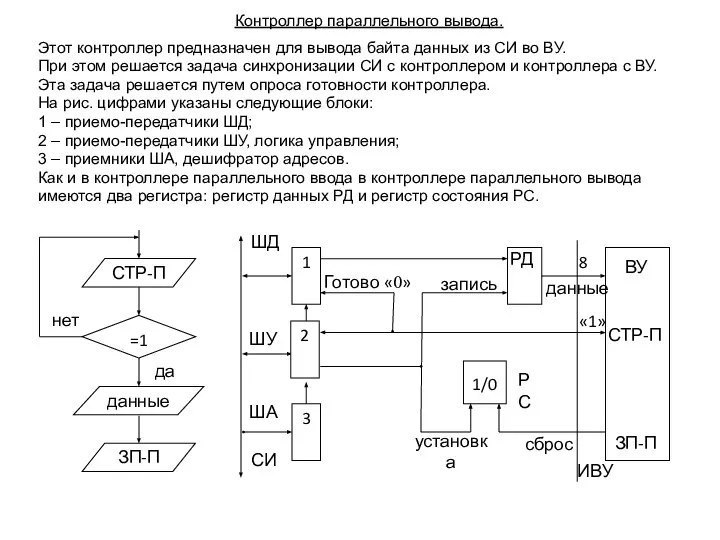
Контроллер параллельного вывода.
Этот контроллер предназначен для вывода байта данных из СИ
Контроллер параллельного вывода.
Этот контроллер предназначен для вывода байта данных из СИ
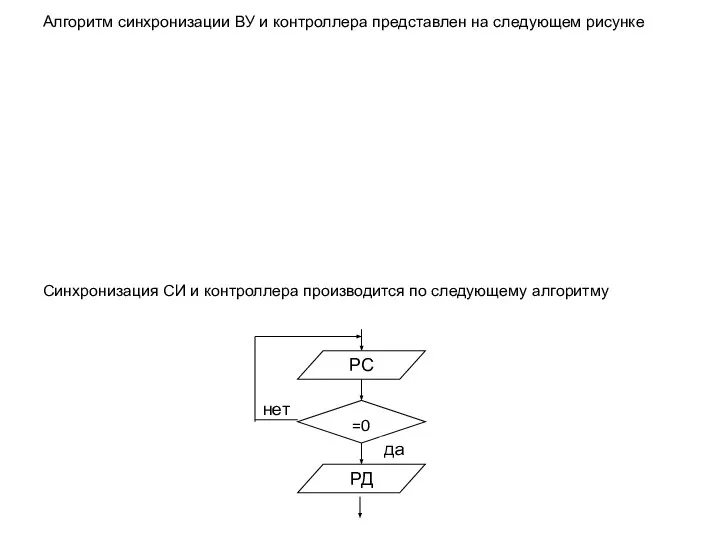
Алгоритм синхронизации ВУ и контроллера представлен на следующем рисунке
Синхронизация СИ и
Алгоритм синхронизации ВУ и контроллера представлен на следующем рисунке
Синхронизация СИ и
Между СИ и контроллером осуществляется асинхронный обмен, т.е. процессор
опрашивает РС
Между СИ и контроллером осуществляется асинхронный обмен, т.е. процессор
опрашивает РС
Интерфейс ИРПР.
ИРПР – интерфейс радиальный параллельный. Интерфейс ИРПР обеспечивает
параллельный байтовый
Интерфейс ИРПР.
ИРПР – интерфейс радиальный параллельный. Интерфейс ИРПР обеспечивает
параллельный байтовый
ИРПР при вводе данных.
Контроллер устанавливает сигнал запроса, в ответ ВУ выдает
ИРПР при вводе данных.
Контроллер устанавливает сигнал запроса, в ответ ВУ выдает
ИРПР при выводе данных.
ГП-ПН – сигнал готовности приемника от приемника, указывает
ИРПР при выводе данных.
ГП-ПН – сигнал готовности приемника от приемника, указывает
Последовательный ввод-вывод.
Последовательный обмен может быть синхронным и асинхронным.
Синхронный обмен. Контроллер последовательного
Последовательный ввод-вывод.
Последовательный обмен может быть синхронным и асинхронным.
Синхронный обмен. Контроллер последовательного
Алгоритм синхронизации СИ и контроллера
1
2
3
РД
СР
Сч
1/0
установка
сброс
ШУ
СИ
ША
ШД
запись
к ВУ
данные
синхр.
сдвиг
чтение
8
0
7
РС
РД
=1
нет
да
готово
чтение
синхр.
данные
0
0
0
0
0
1
1
1
1
Алгоритм синхронизации СИ и контроллера
1
2
3
РД
СР
Сч
1/0
установка
сброс
ШУ
СИ
ША
ШД
запись
к ВУ
данные
синхр.
сдвиг
чтение
8
0
7
РС
РД
=1
нет
да
готово
чтение
синхр.
данные
0
0
0
0
0
1
1
1
1
Контроллер последовательной синхронной передачи.
Этот контроллер предназначен для синхронной передачи данных
Контроллер последовательной синхронной передачи.
Этот контроллер предназначен для синхронной передачи данных
Также в контроллере имеются восьмиразрядный регистр данных (РД) и
одноразрядный регистр
Также в контроллере имеются восьмиразрядный регистр данных (РД) и
одноразрядный регистр
Асинхронный обмен.
Контроллер последовательной асинхронной передачи решает задачу
формирования посылки и
Асинхронный обмен.
Контроллер последовательной асинхронной передачи решает задачу
формирования посылки и
Бит контроля четности в данном случае не формируется.
Данный контроллер содержит следующие
Бит контроля четности в данном случае не формируется.
Данный контроллер содержит следующие
Контроллер последовательного асинхронного приема.
Назначение этого контроллера состоит в преобразовании посылки в
Контроллер последовательного асинхронного приема.
Назначение этого контроллера состоит в преобразовании посылки в
Узлы 1, 2, 3, РС, РД аналогичны соответствующим узлам предыдущих контроллеров.
Узлы 1, 2, 3, РС, РД аналогичны соответствующим узлам предыдущих контроллеров.
Таким образом, режим прямого доступа является эффективным средством передачи
данных. В
Таким образом, режим прямого доступа является эффективным средством передачи
данных. В
Для реализации прямого доступа контроллер запрашивает прямой доступ путем
установки сигнала
Для реализации прямого доступа контроллер запрашивает прямой доступ путем
установки сигнала
Режим работы по прерыванию.
Рассмотрим временную диаграмму прерывания.
Основная программа и прерывающая работают
Режим работы по прерыванию.
Рассмотрим временную диаграмму прерывания.
Основная программа и прерывающая работают
Приоритеты прерывания.
Прерывания подразделяются на внутренние и внешние. Внутренние прерывания
контролируют внутренние
Приоритеты прерывания.
Прерывания подразделяются на внутренние и внешние. Внутренние прерывания
контролируют внутренние
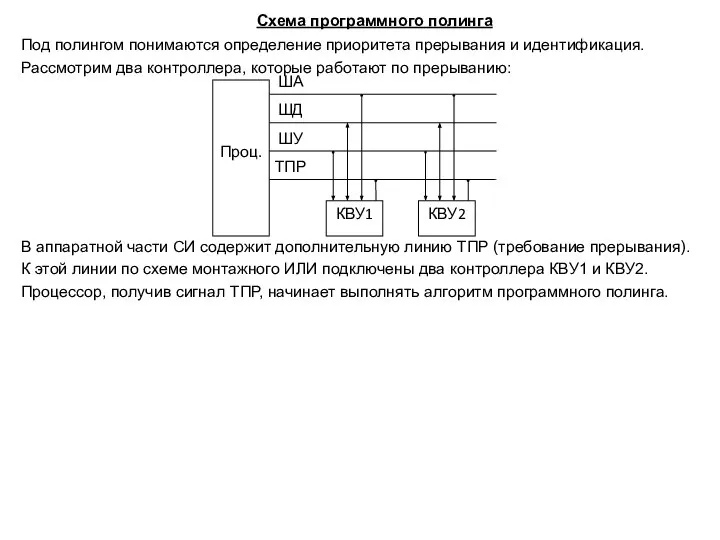
Схема программного полинга
Под полингом понимаются определение приоритета прерывания и идентификация.
Рассмотрим
Схема программного полинга
Под полингом понимаются определение приоритета прерывания и идентификация.
Рассмотрим
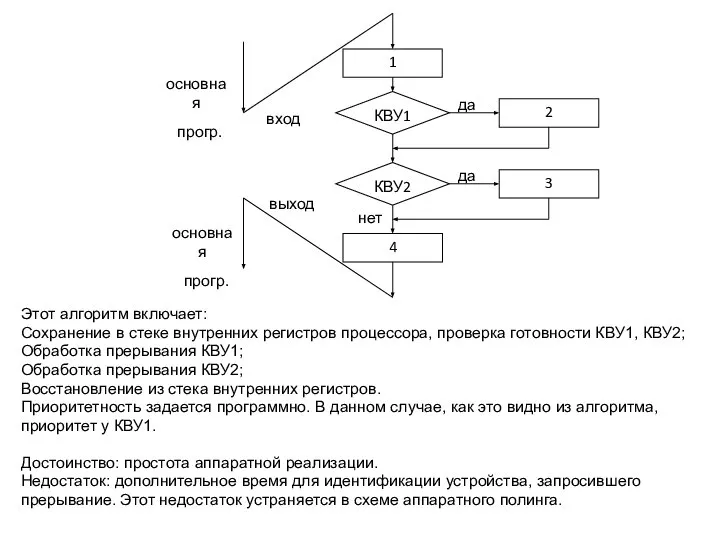
Этот алгоритм включает:
Сохранение в стеке внутренних регистров процессора, проверка готовности КВУ1,
Этот алгоритм включает:
Сохранение в стеке внутренних регистров процессора, проверка готовности КВУ1,
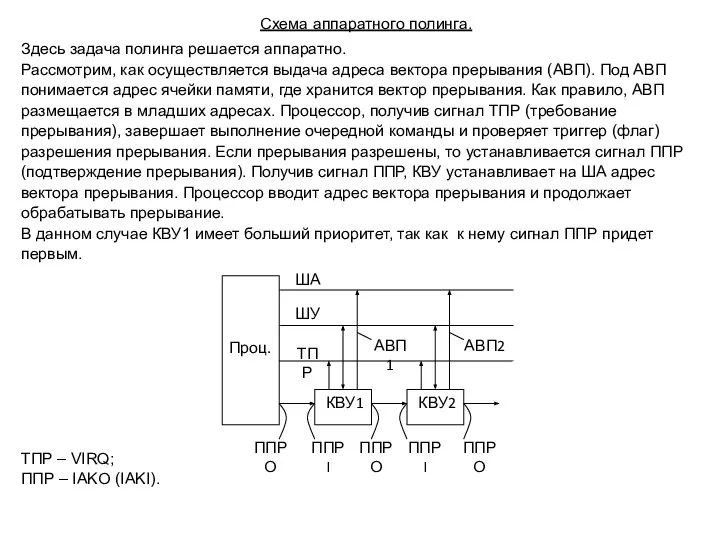
Схема аппаратного полинга.
Здесь задача полинга решается аппаратно.
Рассмотрим, как осуществляется выдача адреса
Схема аппаратного полинга.
Здесь задача полинга решается аппаратно.
Рассмотрим, как осуществляется выдача адреса
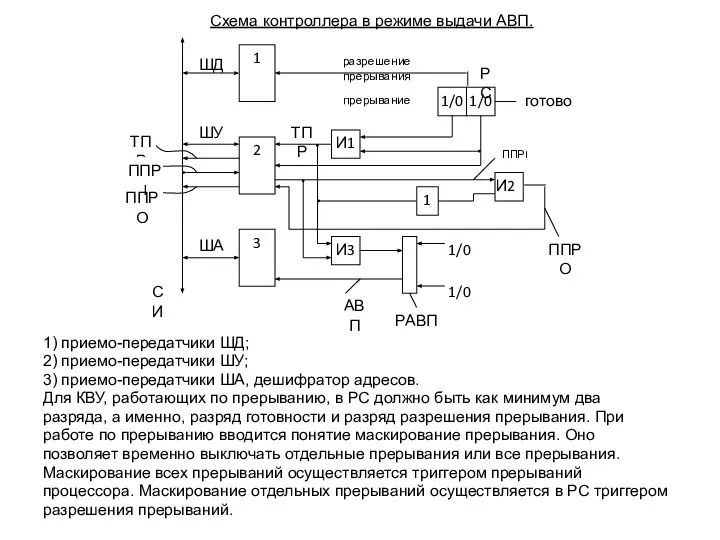
Схема контроллера в режиме выдачи АВП.
1) приемо-передатчики ШД;
2) приемо-передатчики ШУ;
3) приемо-передатчики
Схема контроллера в режиме выдачи АВП.
1) приемо-передатчики ШД;
2) приемо-передатчики ШУ;
3) приемо-передатчики
Ситуация прерывания возникает в контроллере в случае, если прерывания разрешены и
Ситуация прерывания возникает в контроллере в случае, если прерывания разрешены и
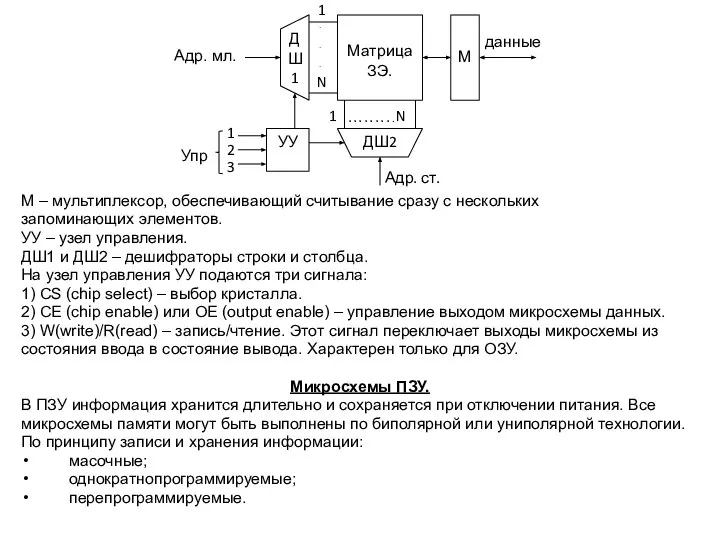
М – мультиплексор, обеспечивающий считывание сразу с нескольких
запоминающих элементов.
УУ –
М – мультиплексор, обеспечивающий считывание сразу с нескольких
запоминающих элементов.
УУ –
Типы ПЗУ и технологии изготовления представлены в следующей схеме
Масочные микросхемы ПЗУ
Типы ПЗУ и технологии изготовления представлены в следующей схеме
Масочные микросхемы ПЗУ
ОТР применяются в серийном и массовом производстве.
Перепрограммируемые микросхемы ПЗУ. Такие микросхемы
ОТР применяются в серийном и массовом производстве.
Перепрограммируемые микросхемы ПЗУ. Такие микросхемы
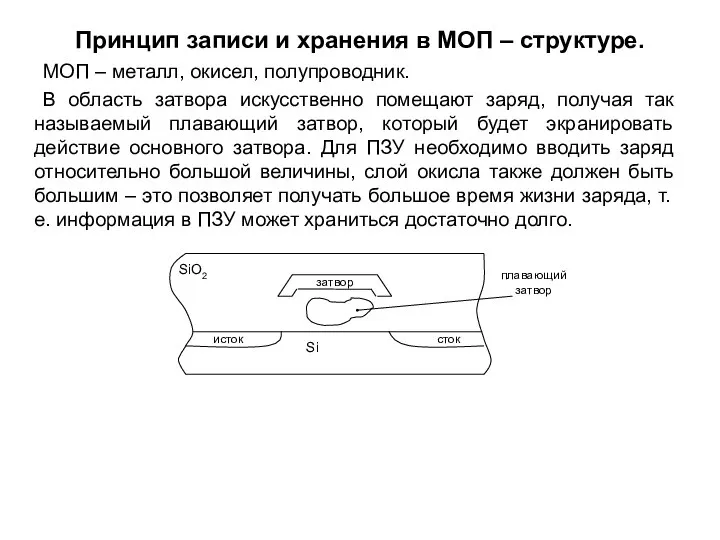
Принцип записи и хранения в МОП – структуре.
МОП – металл, окисел,
Принцип записи и хранения в МОП – структуре.
МОП – металл, окисел,
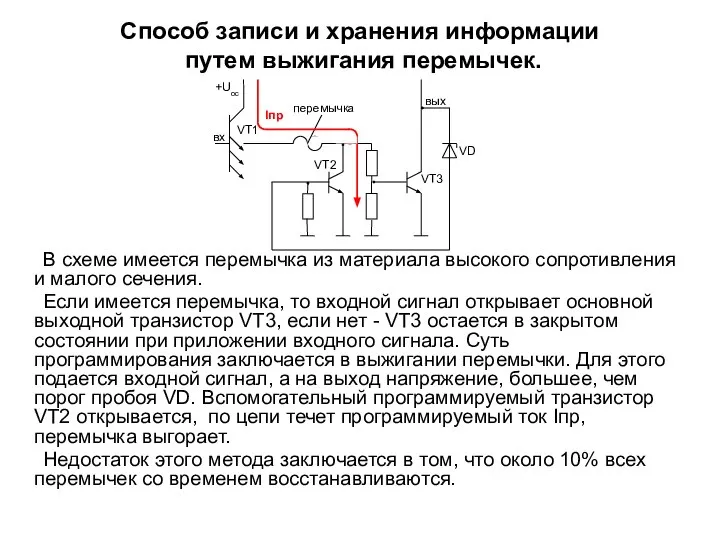
Способ записи и хранения информации
путем выжигания перемычек.
В схеме имеется перемычка
Способ записи и хранения информации
путем выжигания перемычек.
В схеме имеется перемычка
Микросхемы ОЗУ.
ОЗУ предназначено для временного хранения программ и данных.
В микросхеме статического
Микросхемы ОЗУ.
ОЗУ предназначено для временного хранения программ и данных.
В микросхеме статического

Структура микросхемы статической ОЗУ на примере МС КР537РУ10 емкостью 2048×8 бит.
Типовым
Структура микросхемы статической ОЗУ на примере МС КР537РУ10 емкостью 2048×8 бит.
Типовым
Состояние микросхемы отражает следующая таблица
Если сигнал CS равен 1, то микросхема
Состояние микросхемы отражает следующая таблица
Если сигнал CS равен 1, то микросхема
Микросхемы динамического ОЗУ.
Микросхемы динамического ОЗУ обладают значительно большей емкостью, нежели микросхемы
Микросхемы динамического ОЗУ.
Микросхемы динамического ОЗУ обладают значительно большей емкостью, нежели микросхемы

В качестве примера динамического ОЗУ рассмотрим микросхему КР565РУ5 объемом 64×1кбай
Основа микросхемы
В качестве примера динамического ОЗУ рассмотрим микросхему КР565РУ5 объемом 64×1кбай
Основа микросхемы
Состояние микросхемы отражено в следующей таблице
Ниже приведена диаграмма цикла чтения.
tCAS –
Состояние микросхемы отражено в следующей таблице
Ниже приведена диаграмма цикла чтения.
tCAS –
Контроллеры динамического ОЗУ.
Контроллеры динамического ОЗУ можно классифицировать следующим образом:
1. Контроллеры асинхронной
Контроллеры динамического ОЗУ.
Контроллеры динамического ОЗУ можно классифицировать следующим образом:
1. Контроллеры асинхронной
Схему контроллера динамического ОЗУ.
Контроллер включает в себя:
счетчик сток регенерации;
генератор запрета регенерации;
мультиплексор
Схему контроллера динамического ОЗУ.
Контроллер включает в себя:
счетчик сток регенерации;
генератор запрета регенерации;
мультиплексор
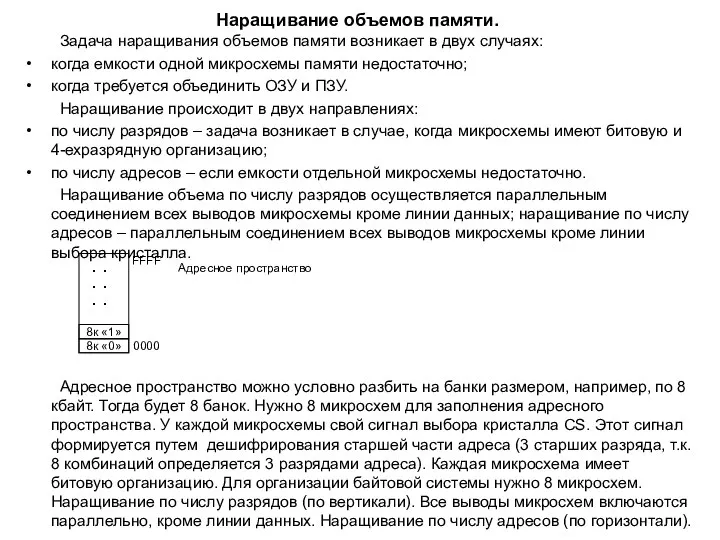
Наращивание объемов памяти.
Задача наращивания объемов памяти возникает в двух случаях:
когда емкости
Наращивание объемов памяти.
Задача наращивания объемов памяти возникает в двух случаях:
когда емкости
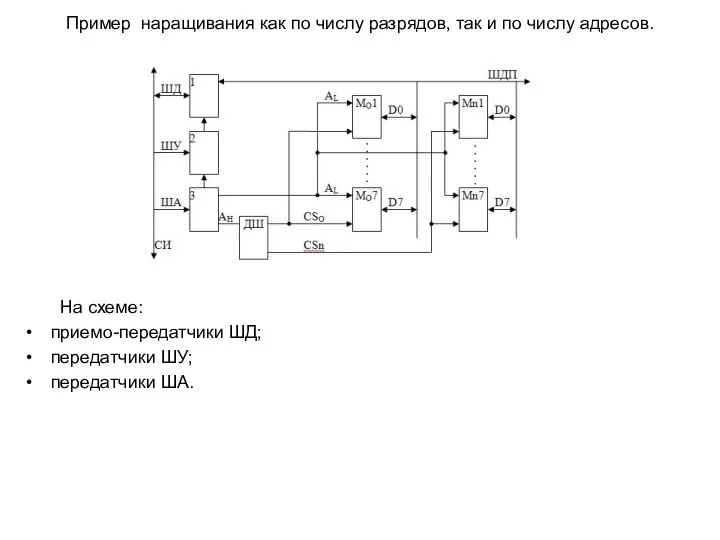
Пример наращивания как по числу разрядов, так и по числу
Пример наращивания как по числу разрядов, так и по числу
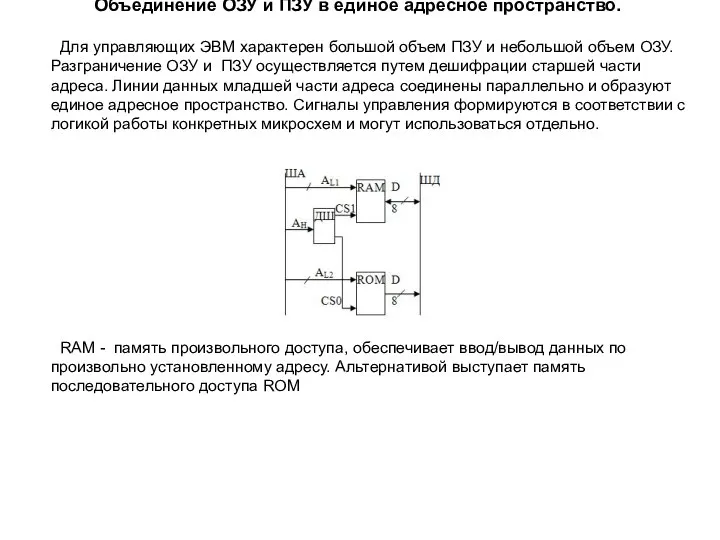
Объединение ОЗУ и ПЗУ в единое адресное пространство.
Для управляющих ЭВМ характерен
Объединение ОЗУ и ПЗУ в единое адресное пространство.
Для управляющих ЭВМ характерен
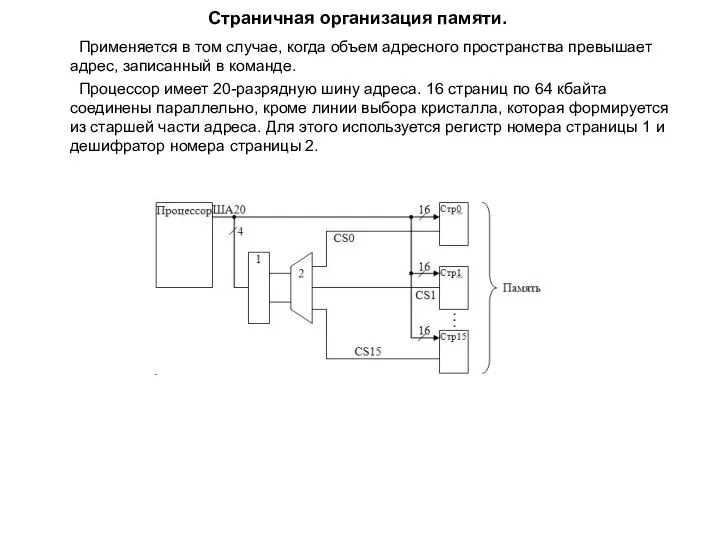
Страничная организация памяти.
Применяется в том случае, когда объем адресного пространства превышает
Страничная организация памяти.
Применяется в том случае, когда объем адресного пространства превышает
Микроконтроллеры.
Средства вычислительной техники (СВТ) используются для управления и для вычислений.
ОЭМ –
Микроконтроллеры.
Средства вычислительной техники (СВТ) используются для управления и для вычислений.
ОЭМ –
Наибольшее распространение получили микроконтроллеры с системой команд 51-го кристалла. Условно это
Наибольшее распространение получили микроконтроллеры с системой команд 51-го кристалла. Условно это
Усовершенствованный микропроцессор С517 имеет следующие отличия:
АЦП (ADS);
устройство быстрой арифметики с высокой
Усовершенствованный микропроцессор С517 имеет следующие отличия:
АЦП (ADS);
устройство быстрой арифметики с высокой
Семейство микроконтроллеров MSC-51.
Организация памяти.
Для микроконтроллеров семейства MSC-51 характерна структура с раздельной
Семейство микроконтроллеров MSC-51.
Организация памяти.
Для микроконтроллеров семейства MSC-51 характерна структура с раздельной
Подключение внешней памяти к микроконтроллеру семейства MCS-51.
Для разделения адреса и данных
Подключение внешней памяти к микроконтроллеру семейства MCS-51.
Для разделения адреса и данных
Объединение адресного пространства для MCS-51.
При объединении памяти программ и памяти данных
Объединение адресного пространства для MCS-51.
При объединении памяти программ и памяти данных
Структурная схема микроконтроллера семейства MCS-51.
Рассмотрим структурную схему микроконтроллера AT89S8252 фирмы «Atmel».
Структурная схема микроконтроллера семейства MCS-51.
Рассмотрим структурную схему микроконтроллера AT89S8252 фирмы «Atmel».
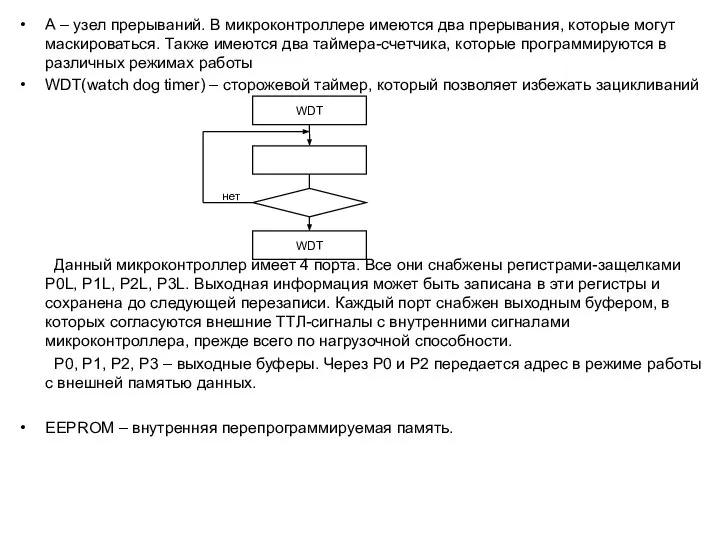
А – узел прерываний. В микроконтроллере имеются два прерывания, которые могут
А – узел прерываний. В микроконтроллере имеются два прерывания, которые могут
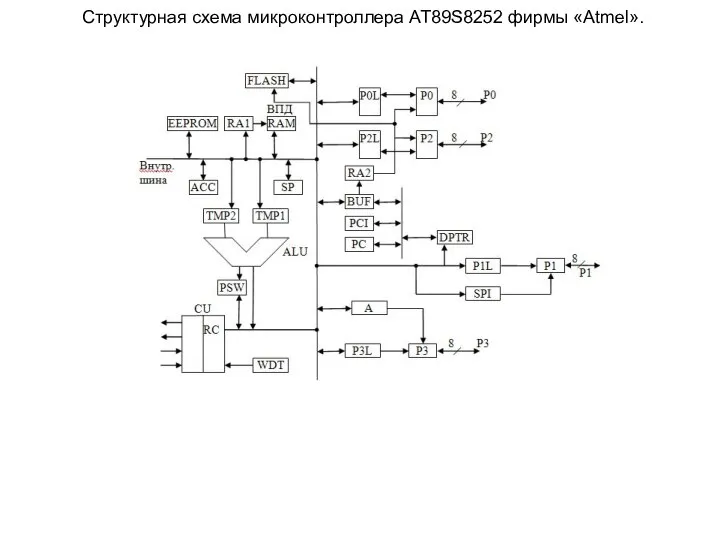
Структурная схема микроконтроллера AT89S8252 фирмы «Atmel».
Структурная схема микроконтроллера AT89S8252 фирмы «Atmel».
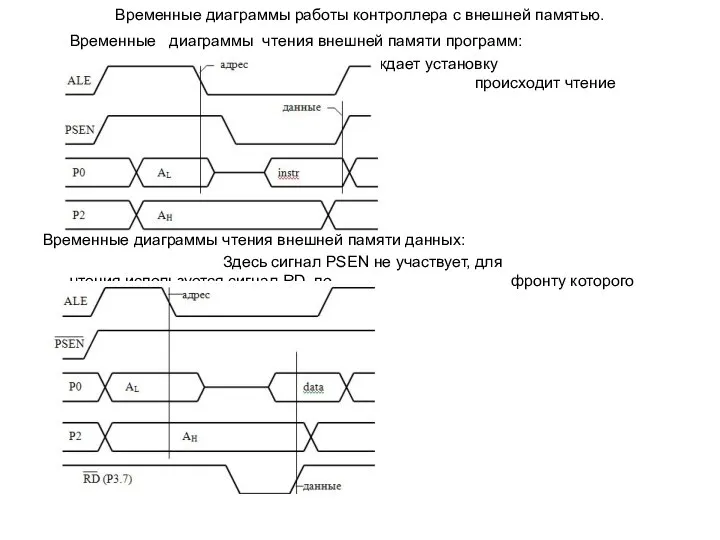
Временные диаграммы работы контроллера с внешней памятью.
Временные диаграммы чтения внешней
Временные диаграммы работы контроллера с внешней памятью.
Временные диаграммы чтения внешней
 Изменение в порядке ведения воинского учета, согласно Федерального Закона № 8-ФЗ от 6 февраля 2019 года
Изменение в порядке ведения воинского учета, согласно Федерального Закона № 8-ФЗ от 6 февраля 2019 года Презентация Налог на имущество юридических лиц
Презентация Налог на имущество юридических лиц Презентация Юридическая ответственность за экологические правонарушения
Презентация Юридическая ответственность за экологические правонарушения  Использование СОТ на уроках русского языка и литературы Муниципальное общеобразовательное учреждение лицей 57 г. Тольятти. - презе
Использование СОТ на уроках русского языка и литературы Муниципальное общеобразовательное учреждение лицей 57 г. Тольятти. - презе Проект «Изумрудные острова». Благоустройство сквера на площади Ленина г. Заволжья
Проект «Изумрудные острова». Благоустройство сквера на площади Ленина г. Заволжья Информационная картина мира
Информационная картина мира Riscurile si potentialile dificultati la asamblarea si depanarea monitoarelor PC
Riscurile si potentialile dificultati la asamblarea si depanarea monitoarelor PC Шаблон для фотопрезентации (1)
Шаблон для фотопрезентации (1) Передвиборча програма кандидата на посаду голови студентської ради Полтавського національного педагогічного університету
Передвиборча програма кандидата на посаду голови студентської ради Полтавського національного педагогічного університету ФИЗКУЛЬТМИНУТКА
ФИЗКУЛЬТМИНУТКА Понятия государства
Понятия государства Сущность режима законности
Сущность режима законности Понятие модуля числа - презентация по Алгебре
Понятие модуля числа - презентация по Алгебре Тема: Необходимость дополнительного образования
Тема: Необходимость дополнительного образования Свободные механические колебания
Свободные механические колебания  Возникновение олимпийских игр
Возникновение олимпийских игр Мукополисахаридозы Подготовила Агеева А.В.
Мукополисахаридозы Подготовила Агеева А.В. Строительство общеобразовательной школы на территории округа «Город Калининград» в Восточном жилом районе
Строительство общеобразовательной школы на территории округа «Город Калининград» в Восточном жилом районе Автоматическое сопровождение электромагнитного луча вокруг электрической оси антенны
Автоматическое сопровождение электромагнитного луча вокруг электрической оси антенны Цветовая палитра интерьера ИМТ
Цветовая палитра интерьера ИМТ Язык программирования JAVA. Функции
Язык программирования JAVA. Функции Фольклорное направление в моде второй половины XX в
Фольклорное направление в моде второй половины XX в Право. Административное право. Задания для выполнения
Право. Административное право. Задания для выполнения Влияние системы учета преступлений на степень соответствия статистических данных действительного положения дела
Влияние системы учета преступлений на степень соответствия статистических данных действительного положения дела Подвесной потолок
Подвесной потолок Теоретическая физика твердого тела
Теоретическая физика твердого тела  Дозиметрические единицы и защита от радиоактивных излучений.
Дозиметрические единицы и защита от радиоактивных излучений.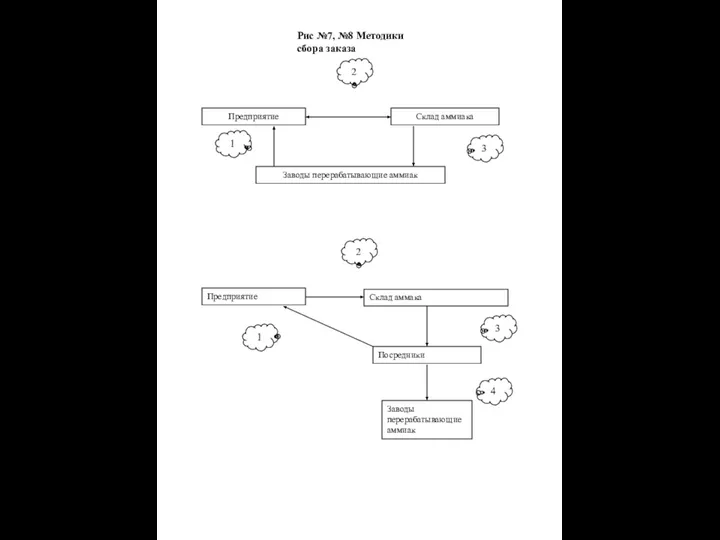 Методики сборки заказа
Методики сборки заказа