- Astanin_protez

Содержание
- 2. Цель: создать прототип бионического протеза руки с минимальной стоимостью и с максимальным функционалом . Задачи: 1.Узнать
- 3. Литературный обзор Бионический протез, он же биоэлектрический и миоэлектрический, работает за счет считывания специальными мио-датчиками электрического
- 4. Календарный план:
- 6. Реализация проекта 1.Моделирование протеза 2.Печать и сборка протеза 3.Программирование протеза
- 10. Заключение: В ходе создания своего протеза, я узнал о видах протезов, функциях, а так же о
- 12. Скачать презентацию
Цель: создать прототип бионического протеза руки с минимальной стоимостью и с
Цель: создать прототип бионического протеза руки с минимальной стоимостью и с

Литературный обзор
Бионический протез, он же биоэлектрический и миоэлектрический, работает за счет
Литературный обзор
Бионический протез, он же биоэлектрический и миоэлектрический, работает за счет
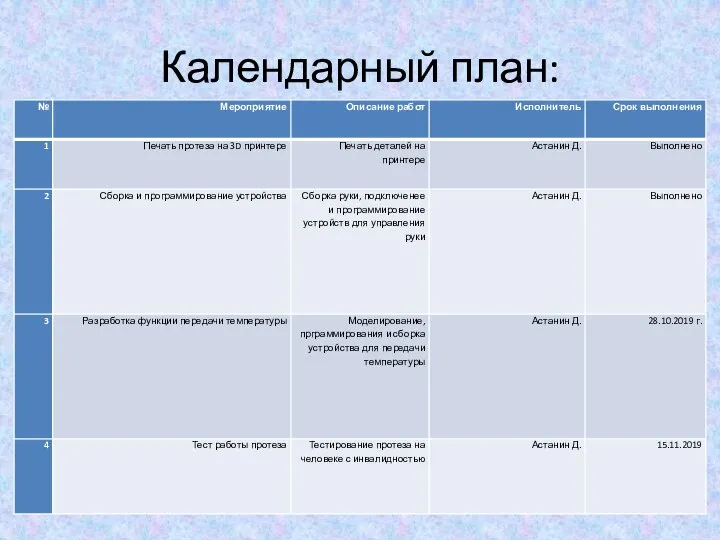
Календарный план:
Календарный план:
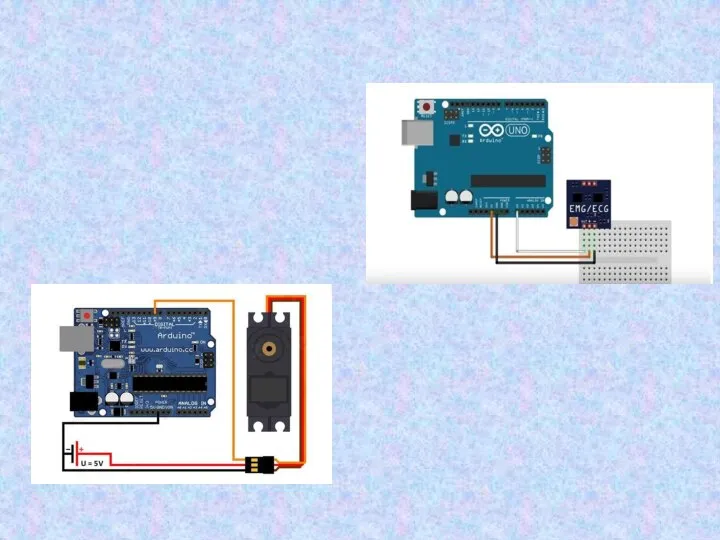
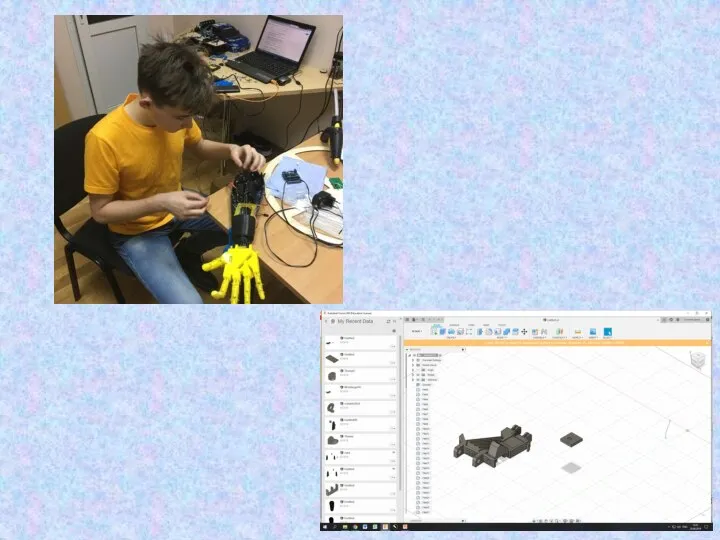
Реализация проекта
1.Моделирование протеза
2.Печать и сборка протеза
3.Программирование протеза
Реализация проекта
1.Моделирование протеза
2.Печать и сборка протеза
3.Программирование протеза
Заключение:
В ходе создания своего протеза, я узнал о видах протезов, функциях,
Заключение:
В ходе создания своего протеза, я узнал о видах протезов, функциях,
 Виды оклеивающих и обойных материалов
Виды оклеивающих и обойных материалов Болезни системы кровообращения как медико-социальная проблема
Болезни системы кровообращения как медико-социальная проблема Факторы прямого управленческого контроля
Факторы прямого управленческого контроля Введение. Исходные концепции. История возникновения квантовой электроники
Введение. Исходные концепции. История возникновения квантовой электроники Психофизиологические основы труда и интеллектуальной деятельности. Средства физической культуры в регуляции трудоспособности
Психофизиологические основы труда и интеллектуальной деятельности. Средства физической культуры в регуляции трудоспособности Международный трибунал
Международный трибунал Интерфейсы ПК. Типы интерфейсов
Интерфейсы ПК. Типы интерфейсов Лесная сертификация
Лесная сертификация  ООО «Юг-Техноавиа». Возмещение расходов от покупки СИЗ из средств ФСС
ООО «Юг-Техноавиа». Возмещение расходов от покупки СИЗ из средств ФСС Финансовое обеспечение деятельности таможенных органов Галибина Л. Т- 114
Финансовое обеспечение деятельности таможенных органов Галибина Л. Т- 114  ТОГУ «Уваровская специальная (коррекционная) общеобразовательная школа-интернат» Индивидуальное коррекционное занятие Учите
ТОГУ «Уваровская специальная (коррекционная) общеобразовательная школа-интернат» Индивидуальное коррекционное занятие Учите Административное право
Административное право Проектирование и моделирование «Ручки
Проектирование и моделирование «Ручки Изображение ландшафта средствами графики
Изображение ландшафта средствами графики ЛФК ДЕВОН-Уфа. Любительская футбольная команда
ЛФК ДЕВОН-Уфа. Любительская футбольная команда Интерфейсы ПК
Интерфейсы ПК Специализированные таможни: оперативная, базовая, энергетическая, акцизная
Специализированные таможни: оперативная, базовая, энергетическая, акцизная  Связь времен в народном искусстве
Связь времен в народном искусстве Commonwealth Games
Commonwealth Games  Теория деятельности и разработка информационных систем: современные тенденции Иван Дегтяренко Иван Бурмистров МГУ им. М. В. Ломо
Теория деятельности и разработка информационных систем: современные тенденции Иван Дегтяренко Иван Бурмистров МГУ им. М. В. Ломо Историческая типология культуры (заключение)
Историческая типология культуры (заключение) Цифровая логика
Цифровая логика Автономное управление шаговым агентом. Олимпиада по программированию
Автономное управление шаговым агентом. Олимпиада по программированию Покров Пресвятой Богородицы. Народные приметы
Покров Пресвятой Богородицы. Народные приметы Устройство, техническое обслуживание и ремонт системы смазки грузового автомобиля КамАЗ 4310
Устройство, техническое обслуживание и ремонт системы смазки грузового автомобиля КамАЗ 4310 Введение в обработку данных
Введение в обработку данных ИГА-2006 (Хирургическая стоматология)
ИГА-2006 (Хирургическая стоматология) A world History of the architecture
A world History of the architecture