- Дискретные системы и сигналы

Содержание
- 2. DSP Z – преобразование Прямое Z – преобразование Обратное Z – преобразование Свойства Z –преобразования Решение
- 3. DSP Дискретные сигналы и системы Z – преобразование В теории систем непрерывного времени преобразование Лапласа рассматривается
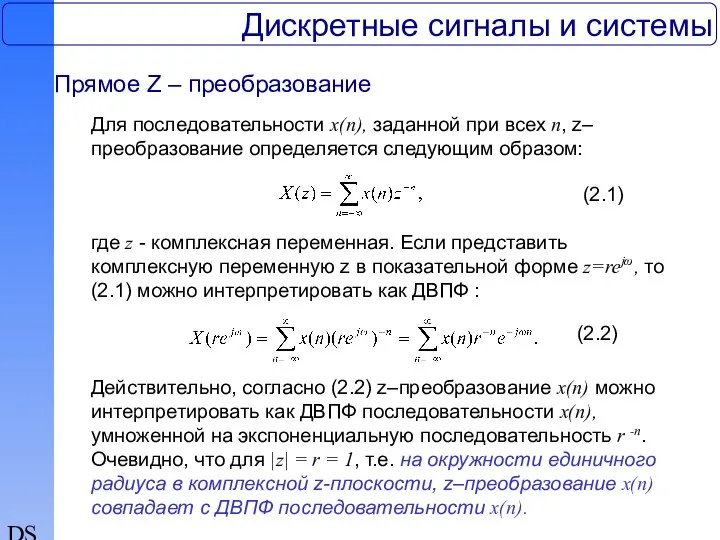
- 4. DSP Дискретные сигналы и системы Прямое Z – преобразование Для последовательности x(n), заданной при всех n,
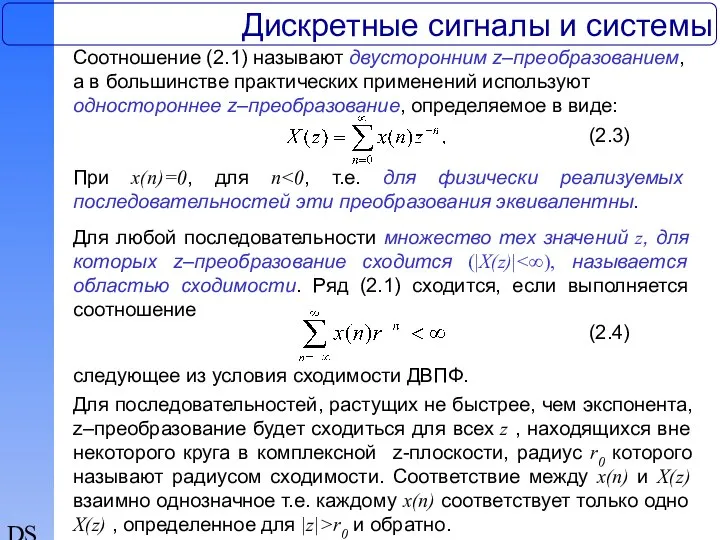
- 5. DSP Дискретные сигналы и системы Соотношение (2.1) называют двусторонним z–преобразованием, а в большинстве практических применений используют
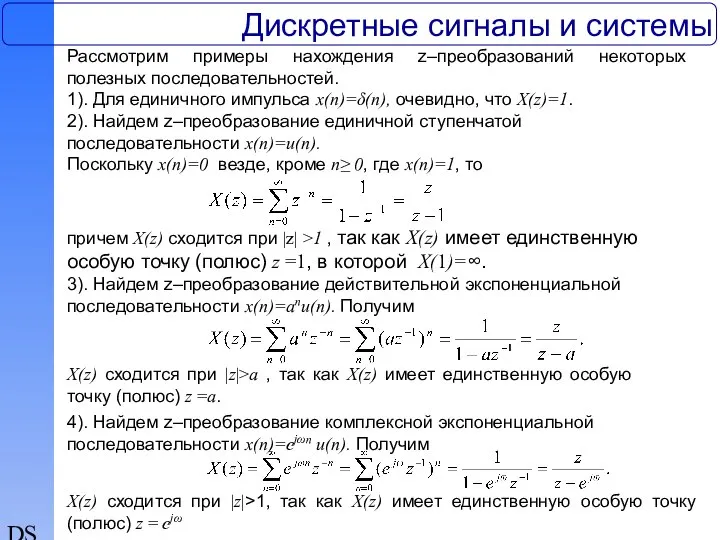
- 6. DSP Дискретные сигналы и системы Рассмотрим примеры нахождения z–преобразований некоторых полезных последовательностей. 1). Для единичного импульса
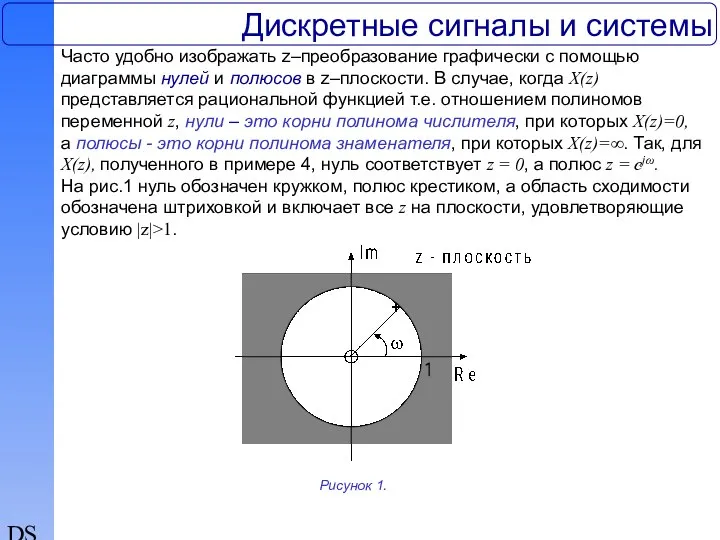
- 7. DSP Дискретные сигналы и системы Часто удобно изображать z–преобразование графически с помощью диаграммы нулей и полюсов
- 8. DSP Дискретные сигналы и системы Обратное Z – преобразование Обратный переход от z–преобразования X(z) к последовательности
- 9. DSP Дискретные сигналы и системы Для рациональных z–преобразований контурные интегралы вида (2.5) удобно вычислять с помощью
- 10. DSP Дискретные сигналы и системы Как пример рассмотрим вычисление обратного преобразования от |z|>а. Используя (2.7), получим
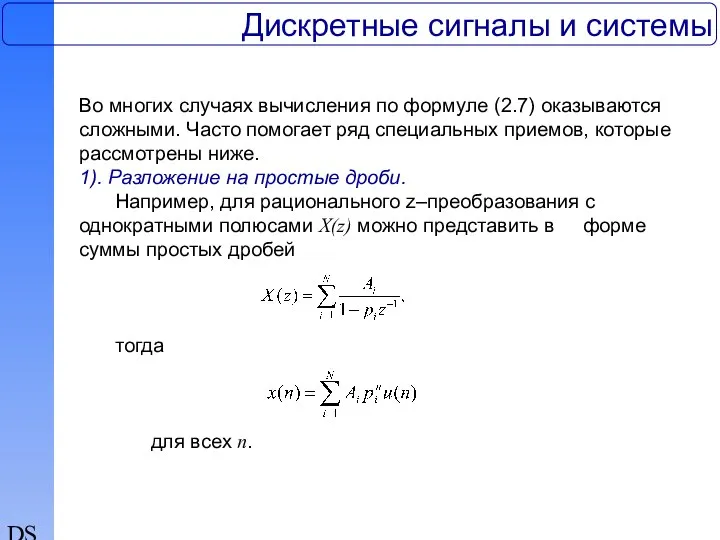
- 11. DSP Дискретные сигналы и системы Во многих случаях вычисления по формуле (2.7) оказываются сложными. Часто помогает
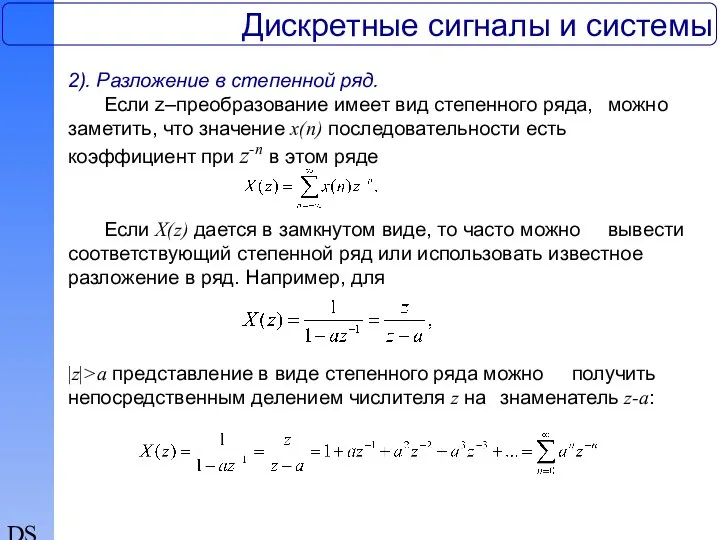
- 12. DSP Дискретные сигналы и системы 2). Разложение в степенной ряд. Если z–преобразование имеет вид степенного ряда,
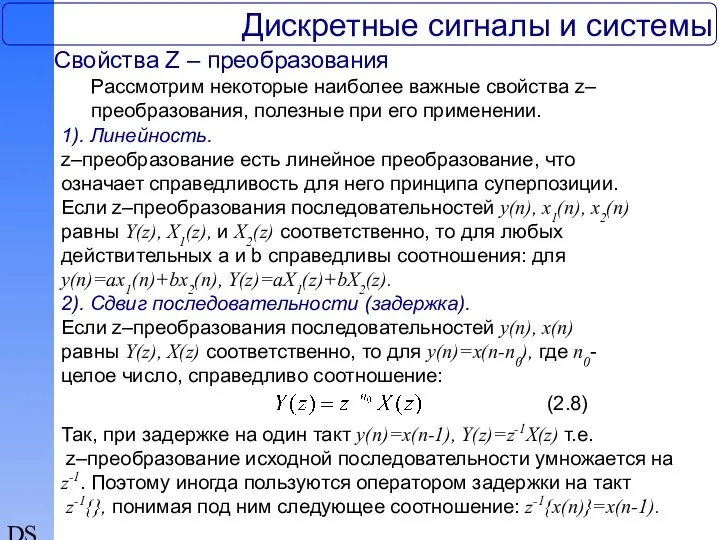
- 13. DSP Дискретные сигналы и системы Свойства Z – преобразования Рассмотрим некоторые наиболее важные свойства z–преобразования, полезные
- 14. DSP Дискретные сигналы и системы Для одностороннего z–преобразования свойство задержки следует рассмотреть подробнее. Пусть y(n)=x(n-n0), (n0>0
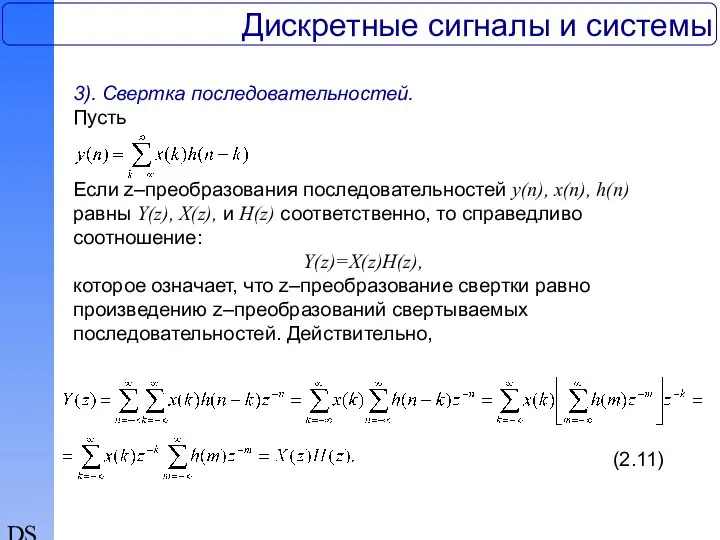
- 15. DSP Дискретные сигналы и системы 3). Свертка последовательностей. Пусть Если z–преобразования последовательностей y(n), x(n), h(n) равны
- 16. DSP Дискретные сигналы и системы 4).Перемножение последовательностей. Пусть y(n)=x1(n)x2(n). Если z–преобразования последовательностей y(n), x1(n), x2(n) равны
- 17. DSP Дискретные сигналы и системы Таблица 1. Краткая таблица одностороннего z–преобразования .
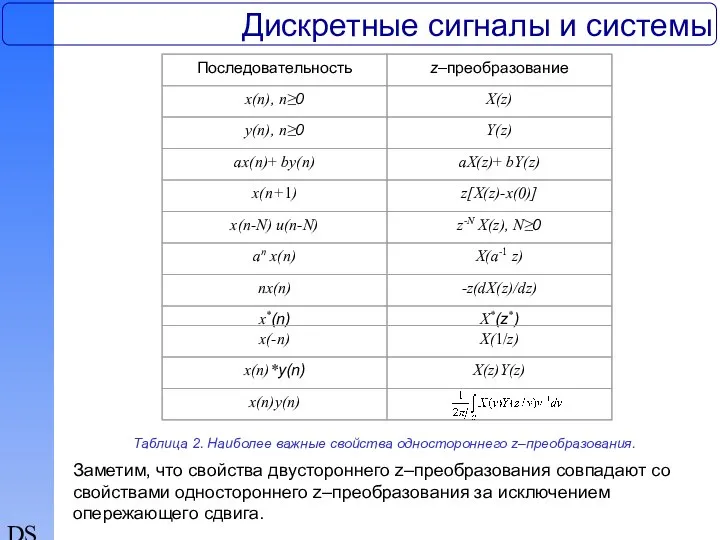
- 18. DSP Дискретные сигналы и системы Таблица 2. Наиболее важные свойства одностороннего z–преобразования. Заметим, что свойства двустороннего
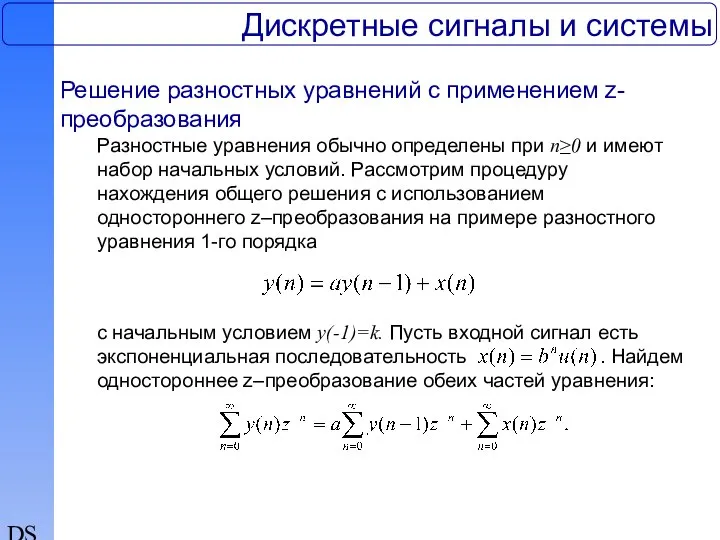
- 19. DSP Дискретные сигналы и системы Решение разностных уравнений с применением z-преобразования Разностные уравнения обычно определены при
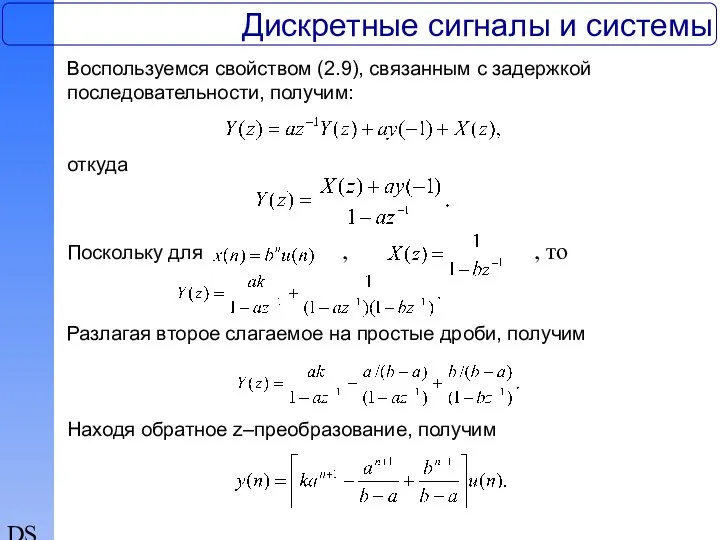
- 20. DSP Дискретные сигналы и системы Воспользуемся свойством (2.9), связанным с задержкой последовательности, получим: откуда Поскольку для
- 21. DSP Дискретные сигналы и системы Первая компонента в скобках представляет составляющую отклика, определяемую начальными условиями, или
- 22. DSP Дискретные сигналы и системы Передаточная (системная) функция Выше мы рассмотрели описание линейных систем с постоянными
- 23. DSP Дискретные сигналы и системы Часто z-преобразование импульсной характеристики называется передаточной или системной функцией. Передаточная функция
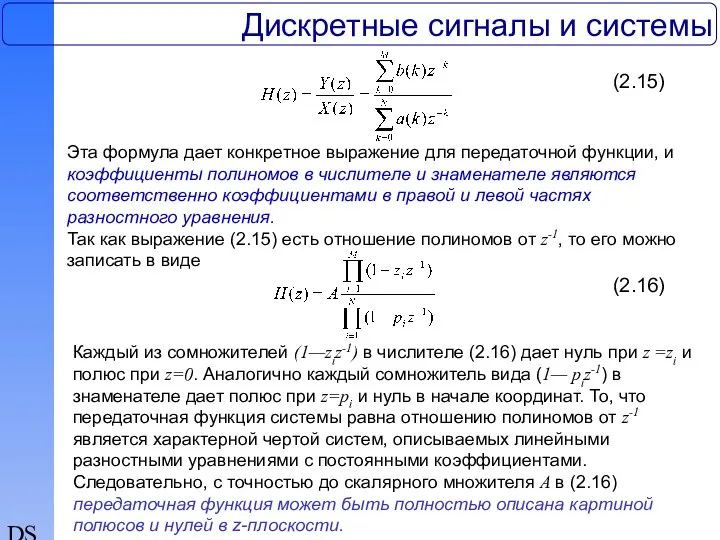
- 24. DSP Дискретные сигналы и системы Если систему можно описать линейным разностным уравнением с постоянными коэффициентами, то
- 25. DSP Дискретные сигналы и системы Эта формула дает конкретное выражение для передаточной функции, и коэффициенты полиномов
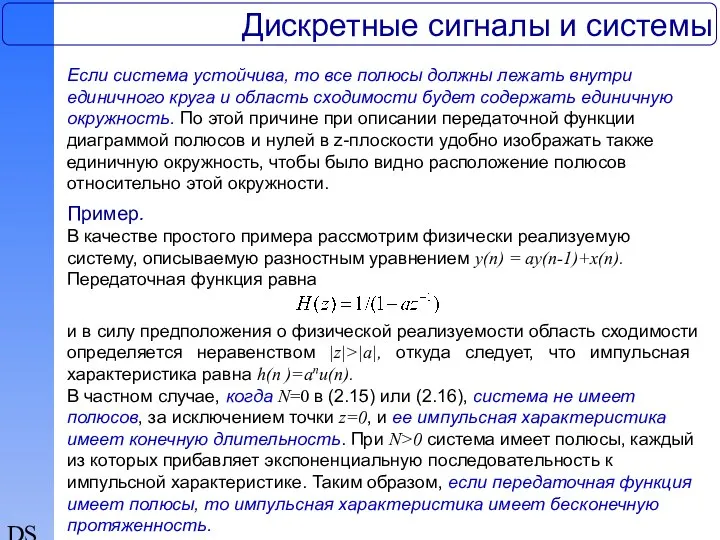
- 26. DSP Дискретные сигналы и системы Если система устойчива, то все полюсы должны лежать внутри единичного круга
- 27. DSP Дискретные сигналы и системы Одним из преимуществ представления передаточной функции посредством ее полюсов и нулей
- 28. DSP Дискретные сигналы и системы Чтобы определить передаточную функцию на единичной окружности, нужно подставить z=ejω в
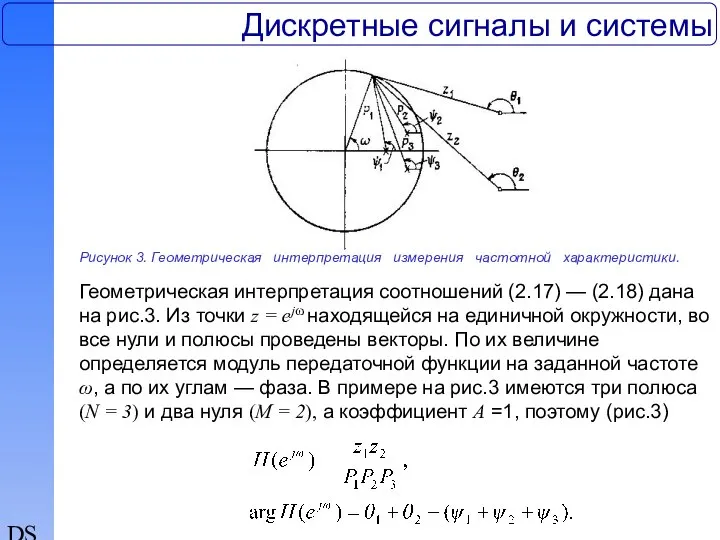
- 29. DSP Дискретные сигналы и системы Рисунок 3. Геометрическая интерпретация измерения частотной характеристики. Геометрическая интерпретация соотношений (2.17)
- 30. DSP Дискретные сигналы и системы Для определения передаточной функции на всех частотах 0≤ω≤π необходимо перемещать z
- 31. DSP Дискретные сигналы и системы В качестве второго примера рассмотрим случай, когда импульсная характеристика системы является
- 33. Скачать презентацию

DSP
Z – преобразование
Прямое Z – преобразование
Обратное Z – преобразование
Свойства
DSP
Z – преобразование
Прямое Z – преобразование
Обратное Z – преобразование
Свойства
DSP
Дискретные сигналы и системы
Z – преобразование
В теории систем непрерывного
DSP
Дискретные сигналы и системы
Z – преобразование
В теории систем непрерывного
DSP
Дискретные сигналы и системы
Прямое Z – преобразование
Для последовательности x(n), заданной
DSP
Дискретные сигналы и системы
Прямое Z – преобразование
Для последовательности x(n), заданной
DSP
Дискретные сигналы и системы
Соотношение (2.1) называют двусторонним z–преобразованием, а в большинстве
DSP
Дискретные сигналы и системы
Соотношение (2.1) называют двусторонним z–преобразованием, а в большинстве
DSP
Дискретные сигналы и системы
Рассмотрим примеры нахождения z–преобразований некоторых полезных последовательностей.
1).
DSP
Дискретные сигналы и системы
Рассмотрим примеры нахождения z–преобразований некоторых полезных последовательностей.
1).
DSP
Дискретные сигналы и системы
Часто удобно изображать z–преобразование графически с помощью диаграммы
DSP
Дискретные сигналы и системы
Часто удобно изображать z–преобразование графически с помощью диаграммы

DSP
Дискретные сигналы и системы
Обратное Z – преобразование
Обратный переход от z–преобразования
DSP
Дискретные сигналы и системы
Обратное Z – преобразование
Обратный переход от z–преобразования

DSP
Дискретные сигналы и системы
Для рациональных z–преобразований контурные интегралы вида (2.5) удобно
DSP
Дискретные сигналы и системы
Для рациональных z–преобразований контурные интегралы вида (2.5) удобно

DSP
Дискретные сигналы и системы
Как пример рассмотрим вычисление обратного преобразования от
|z|>а.
DSP
Дискретные сигналы и системы
Как пример рассмотрим вычисление обратного преобразования от
|z|>а.
DSP
Дискретные сигналы и системы
Во многих случаях вычисления по формуле (2.7) оказываются
DSP
Дискретные сигналы и системы
Во многих случаях вычисления по формуле (2.7) оказываются
DSP
Дискретные сигналы и системы
2). Разложение в степенной ряд.
Если z–преобразование имеет вид
DSP
Дискретные сигналы и системы
2). Разложение в степенной ряд.
Если z–преобразование имеет вид
DSP
Дискретные сигналы и системы
Свойства Z – преобразования
Рассмотрим некоторые наиболее важные
DSP
Дискретные сигналы и системы
Свойства Z – преобразования
Рассмотрим некоторые наиболее важные

DSP
Дискретные сигналы и системы
Для одностороннего z–преобразования свойство задержки следует рассмотреть подробнее.
DSP
Дискретные сигналы и системы
Для одностороннего z–преобразования свойство задержки следует рассмотреть подробнее.
DSP
Дискретные сигналы и системы
3). Свертка последовательностей.
Пусть
Если z–преобразования последовательностей y(n), x(n),
DSP
Дискретные сигналы и системы
3). Свертка последовательностей.
Пусть
Если z–преобразования последовательностей y(n), x(n),

DSP
Дискретные сигналы и системы
4).Перемножение последовательностей.
Пусть y(n)=x1(n)x2(n). Если z–преобразования последовательностей y(n), x1(n),
DSP
Дискретные сигналы и системы
4).Перемножение последовательностей.
Пусть y(n)=x1(n)x2(n). Если z–преобразования последовательностей y(n), x1(n),

DSP
Дискретные сигналы и системы
Таблица 1. Краткая таблица одностороннего z–преобразования .
DSP
Дискретные сигналы и системы
Таблица 1. Краткая таблица одностороннего z–преобразования .
DSP
Дискретные сигналы и системы
Таблица 2. Наиболее важные свойства одностороннего z–преобразования.
Заметим, что
DSP
Дискретные сигналы и системы
Таблица 2. Наиболее важные свойства одностороннего z–преобразования.
Заметим, что
DSP
Дискретные сигналы и системы
Решение разностных уравнений с применением z-преобразования
Разностные уравнения
DSP
Дискретные сигналы и системы
Решение разностных уравнений с применением z-преобразования
Разностные уравнения
DSP
Дискретные сигналы и системы
Воспользуемся свойством (2.9), связанным с задержкой последовательности, получим:
откуда
DSP
Дискретные сигналы и системы
Воспользуемся свойством (2.9), связанным с задержкой последовательности, получим:
откуда

DSP
Дискретные сигналы и системы
Первая компонента в скобках представляет составляющую отклика, определяемую
DSP
Дискретные сигналы и системы
Первая компонента в скобках представляет составляющую отклика, определяемую

DSP
Дискретные сигналы и системы
Передаточная (системная) функция
Выше мы рассмотрели описание линейных систем
DSP
Дискретные сигналы и системы
Передаточная (системная) функция
Выше мы рассмотрели описание линейных систем

DSP
Дискретные сигналы и системы
Часто z-преобразование импульсной характеристики называется передаточной или системной
DSP
Дискретные сигналы и системы
Часто z-преобразование импульсной характеристики называется передаточной или системной

DSP
Дискретные сигналы и системы
Если систему можно описать линейным разностным уравнением с
DSP
Дискретные сигналы и системы
Если систему можно описать линейным разностным уравнением с
DSP
Дискретные сигналы и системы
Эта формула дает конкретное выражение для передаточной функции,
DSP
Дискретные сигналы и системы
Эта формула дает конкретное выражение для передаточной функции,
DSP
Дискретные сигналы и системы
Если система устойчива, то все полюсы должны лежать
DSP
Дискретные сигналы и системы
Если система устойчива, то все полюсы должны лежать
DSP
Дискретные сигналы и системы
Одним из преимуществ представления передаточной функции посредством ее
DSP
Дискретные сигналы и системы
Одним из преимуществ представления передаточной функции посредством ее

DSP
Дискретные сигналы и системы
Чтобы определить передаточную функцию на единичной окружности, нужно
DSP
Дискретные сигналы и системы
Чтобы определить передаточную функцию на единичной окружности, нужно
DSP
Дискретные сигналы и системы
Рисунок 3. Геометрическая интерпретация измерения частотной характеристики.
Геометрическая интерпретация
DSP
Дискретные сигналы и системы
Рисунок 3. Геометрическая интерпретация измерения частотной характеристики.
Геометрическая интерпретация

DSP
Дискретные сигналы и системы
Для определения передаточной функции на всех частотах 0≤ω≤π
DSP
Дискретные сигналы и системы
Для определения передаточной функции на всех частотах 0≤ω≤π

DSP
Дискретные сигналы и системы
В качестве второго примера рассмотрим случай, когда импульсная
DSP
Дискретные сигналы и системы
В качестве второго примера рассмотрим случай, когда импульсная
 Государственный кредит и государственный долг
Государственный кредит и государственный долг  Документальное оформление хозяйственных операций и его влияние на способы совершения преступлений
Документальное оформление хозяйственных операций и его влияние на способы совершения преступлений Самые странные альтернативы деньгам в мире
Самые странные альтернативы деньгам в мире Методы (подпрограммы) в Java-программе (Лекция 7)
Методы (подпрограммы) в Java-программе (Лекция 7) Древние корни народного искусства Декоративно-прикладное искусство в жизни человека
Древние корни народного искусства Декоративно-прикладное искусство в жизни человека Устройство обмоток якоря и их характеристики
Устройство обмоток якоря и их характеристики Характерные черты архитектуры барокко Обилие пышных декоративных украшений. Искажение классических пропорций (диссонанс и асим
Характерные черты архитектуры барокко Обилие пышных декоративных украшений. Искажение классических пропорций (диссонанс и асим Открытый урок к Единому Дню ВФСК ГТО
Открытый урок к Единому Дню ВФСК ГТО Основные понятия, определения и законы теории электрических цепей. Основные понятия топологии электрических цепей. Законы Ома и К
Основные понятия, определения и законы теории электрических цепей. Основные понятия топологии электрических цепей. Законы Ома и К Технология приготовления слоеного теста
Технология приготовления слоеного теста Разработка темы в Power Point Кукоевой Ларисы Николаевны учителя ГОУ СОШ №11 г. Москвы
Разработка темы в Power Point Кукоевой Ларисы Николаевны учителя ГОУ СОШ №11 г. Москвы  Сти́вен Уи́льям Хо́кинг
Сти́вен Уи́льям Хо́кинг Цитогенетический и биохимический методы исследования генетики человека
Цитогенетический и биохимический методы исследования генетики человека  Спрос и предложения
Спрос и предложения ПРАВООХРАНИТЕЛЬНАЯ ДЕЯТЕЛЬНОСТЬ ТАМОЖЕННЫХ ОРГАНОВ РОССИИ НА СОВРЕМЕННОМ ЭТАПЕ.
ПРАВООХРАНИТЕЛЬНАЯ ДЕЯТЕЛЬНОСТЬ ТАМОЖЕННЫХ ОРГАНОВ РОССИИ НА СОВРЕМЕННОМ ЭТАПЕ. НОРМАТИВНО-ПРАВОВОЕ ОБЕСПЕЧЕНИЕ ДЕЯТЕЛЬНОСТИ УЧИТЕЛЯ-ЛОГОПЕДА ОБЩЕОБРАЗОВАТЕЛЬНОЙ ШКОЛЫ Выполнила: учитель – логопед МБОУ «Ли
НОРМАТИВНО-ПРАВОВОЕ ОБЕСПЕЧЕНИЕ ДЕЯТЕЛЬНОСТИ УЧИТЕЛЯ-ЛОГОПЕДА ОБЩЕОБРАЗОВАТЕЛЬНОЙ ШКОЛЫ Выполнила: учитель – логопед МБОУ «Ли Bundesland Österreich
Bundesland Österreich Криптографические методы и средства для защиты информации 2
Криптографические методы и средства для защиты информации 2 Международная научно-практическая конференция «Техническое регулирование строительной отрасли в современных условиях»
Международная научно-практическая конференция «Техническое регулирование строительной отрасли в современных условиях» Учитель биологии Учитель биологии Бурганова О.Л.
Учитель биологии Учитель биологии Бурганова О.Л. Шанхайская организация сотрудничества (ШОС)
Шанхайская организация сотрудничества (ШОС) Характеристика культуры Ливии
Характеристика культуры Ливии Техническое обслуживание и ремонт комплексной системы автоматического управления двигателем автомобиля Lada Kalina
Техническое обслуживание и ремонт комплексной системы автоматического управления двигателем автомобиля Lada Kalina Создание рынков как конструирование ниши: пример рынка CDS Павел Олегович Лукша pavel.luksha@gmail.com
Создание рынков как конструирование ниши: пример рынка CDS Павел Олегович Лукша pavel.luksha@gmail.com Художественная культура Удмуртии
Художественная культура Удмуртии Праздник Рождества в России: традиции, с ним связанные
Праздник Рождества в России: традиции, с ним связанные Презентация "Мэрилин Монро" - скачать презентации по МХК
Презентация "Мэрилин Монро" - скачать презентации по МХК Социальные изменения и социальные процессы. Прогресс и регресс.
Социальные изменения и социальные процессы. Прогресс и регресс.