- Глава 3_2

Содержание
- 2. ГЛАВА 3. ПРОСТРАНСТВЕННАЯ ОБЛАСТЬ ЦИТ Содержание: Объекты и шкалы пространственнóй области Преобразователи положение→код (абсолютные) с кодовыми
- 3. ОБЪЕКТЫ ПРОСТРАНСТВЕННǑЙ ОБЛАСТИ В пространственной области мы имеем дело с относительными положениями и относительными перемещениями твёрдых,
- 4. СХОДСТВО И РАЗЛИЧИЯ ПРОСТРАНСТВЕННОЙ И ВРЕМЕННǑЙ ОБЛАСТЕЙ ЦИТ Во временнóй области мы рассматривали одномерные явления. Положение
- 5. Во временной области ЦИТ рассматривались шкалы стробов для датирования событий и импульсные шкалы для измерения интервалов.
- 6. Во временной области большую роль играют колебательные процессы, на основе которых формируются шкалы высокой равномерности. В
- 7. Во временной области представление колебательного процесса вращающимся вектором наводило на мысль о возможности использования вещественной и
- 8. Во временной области ЦИТ мы рассматривали прямые и обратные преобразования: длительность→код и код→длительность, частота→код и код→частота.
- 9. ВИДЫ ШКАЛ ПРОСТРАНСТВЕННОЙ ОБЛАСТИ Бóльшая часть шкал пространственной области представляет собой кодовые маски, получившиеся развитием шкал
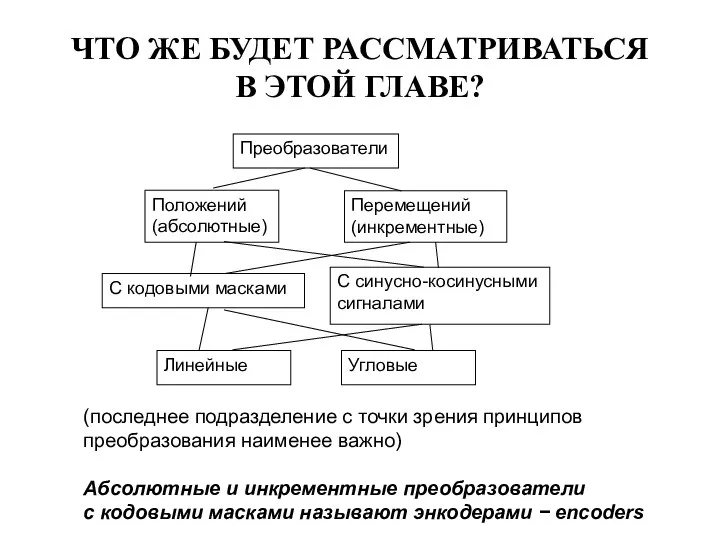
- 10. ЧТО ЖЕ БУДЕТ РАССМАТРИВАТЬСЯ В ЭТОЙ ГЛАВЕ? (последнее подразделение с точки зрения принципов преобразования наименее важно)
- 11. ПРЕОБРАЗОВАТЕЛИ ПОЛОЖЕНИЕ→КОД С КОДОВЫМИ МАСКАМИ Преобразователи с масками содержат одну или несколько круговых или линейных дорожек,
- 12. Диск, кодированный натуральным двоичным кодом. Тёмные участки − двоичные нули, светлые − единицы Одна из опасных
- 13. Рейка, кодированная кодом Грея Светлые участки − двоичные нули, тёмные − единицы Однопеременный код Грея исключает
- 14. Расщепление воспринимающих элементов (U-расположение) Тёмные участки − двоичные нули, светлые − единицы При четырёх разрядах самая
- 15. Абсолютный энкодер СКБ ИС
- 16. Абсолютный энкодер фирмы Autonics
- 17. СИНУСНО-КОСИНУСНЫЕ СИГНАЛЫ Пара сигналов постоянного или переменного тока, изменяющихся как Umsinx и Umcosx, позволяет найти измеряемую
- 18. Синусно-косинусные вращающиеся трансформаторы − СКВТ (resolvers) Пример − продукция СКБ ИС
- 19. Следующие иллюстрации − из статьи:
- 20. Что такое СКВТ
- 21. Сигналы СКВТ
- 22. Получение цифрового отсчёта с помощью СКВТ
- 23. Принцип обработки сигналов СКВТ следящей системой
- 24. Математическая основа обработки
- 25. Микросхема с аналоговой обработкой сигналов СКВТ
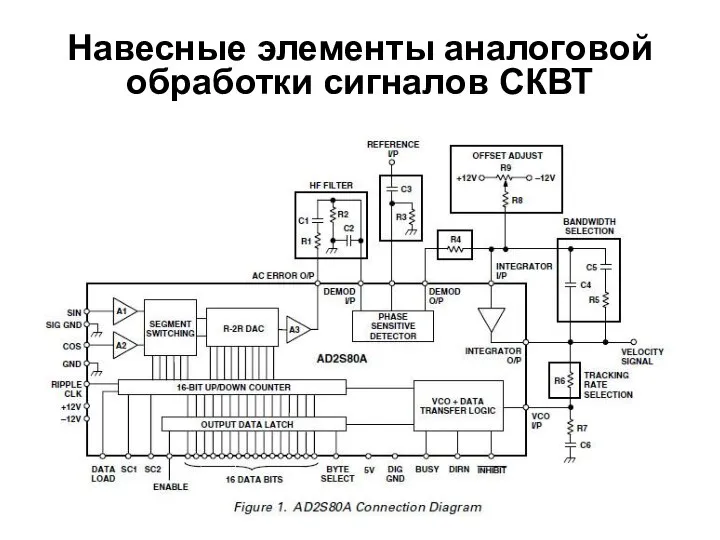
- 26. Навесные элементы аналоговой обработки сигналов СКВТ
- 27. Соединение СКВТ с микросхемой AD2S80A
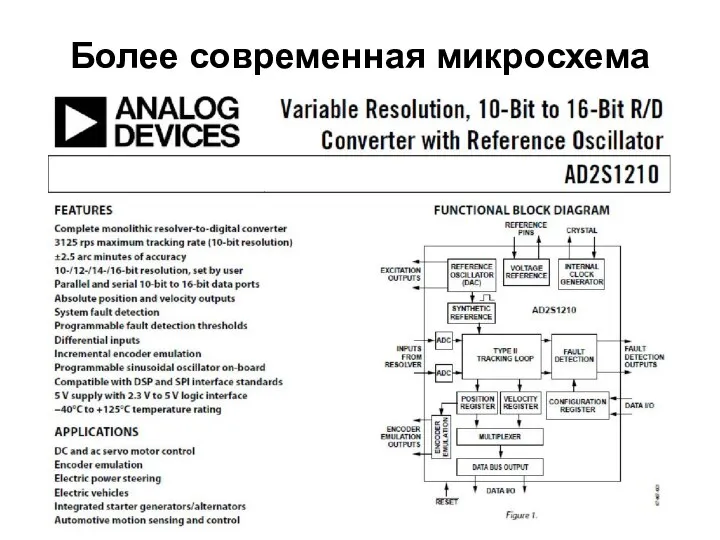
- 28. Более современная микросхема
- 29. Соединение СКВТ с микросхемой AD2S1210
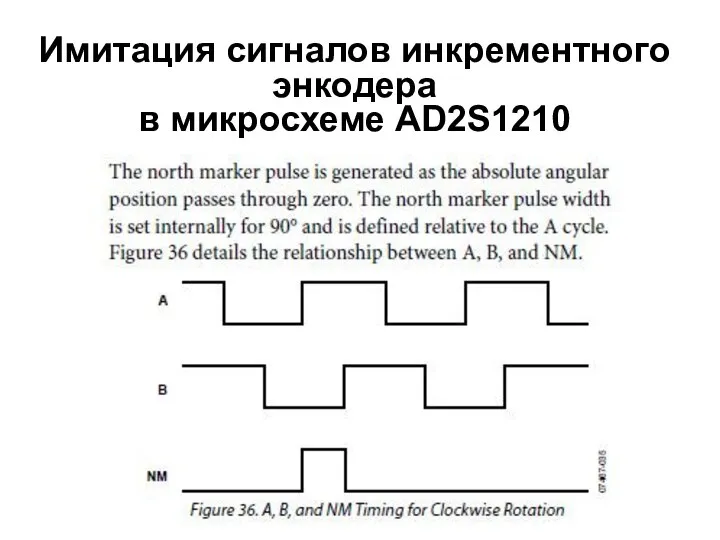
- 30. Имитация сигналов инкрементного энкодера в микросхеме AD2S1210
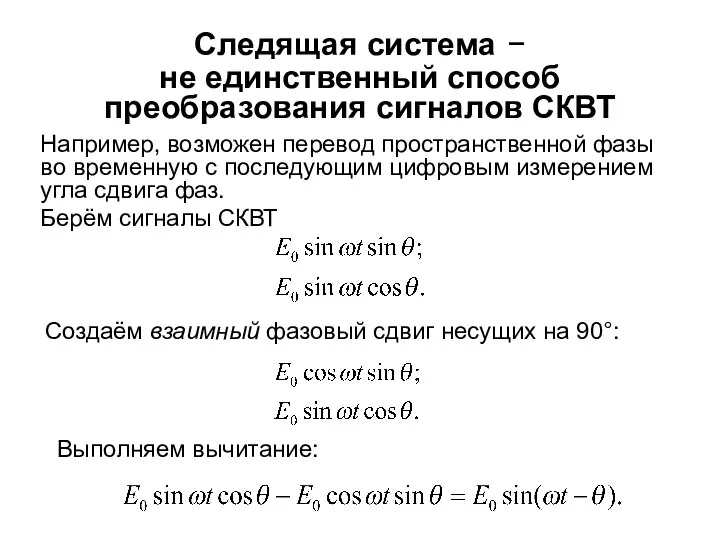
- 31. Следящая система − не единственный способ преобразования сигналов СКВТ Например, возможен перевод пространственной фазы во временную
- 32. Наряду с СКВТ для преобразования могут использоваться сельсины Сельсин (synchro) отличается от СКВТ трёхфазной системой выходных
- 33. ПРИМЕНЕНИЯ ИНКРЕМЕНТНЫХ ЭНКОДЕРОВ
- 34. Инкрементный энкодер СКБ ИС 1080000 : 360 = 3000 импульсов на градус или 50 импульсов на
- 35. Инкрементный энкодер фирмы Autonics
- 36. Одноразрядная двоичная шкала в инкрементном преобразователе (по книге: Кнорринг 2003) Наличие двух воспринимающих элементов A и
- 37. Аппаратная обработка сигналов инкрементного датчика По книге: Кнорринг В.Г. Цифровые средства измерений с пространственными инкрементными шкалами.
- 38. Программная обработка сигналов инкрементного датчика Сигналы инкрементного датчика вводятся в микроконтроллер с такой частотой, чтобы при
- 39. Предыдущее Текущее a b a b 0 0 0 0 0 0 0 1 0 0
- 40. Инкрементные преобразователи с синусно-косинусными сигналами Индуктосины Оптические растровые сопряжения Интерферометры (Коронкевич, Ленкова. Новосибирск, 1971)
- 41. Получение синусно-косинусных сигналов в оптическом растровом сопряжении В настоящее время предпочитают сопряжения с одинаковым периодом штрихов
- 42. Интерполяция синусно-косинусных сигналов инкрементных преобразователей Интерполяция путём синтеза сдвинутых сигналов (Вульвет)
- 43. Интерполяция путём формирования треугольного и постоянных опорных сигналов (Opton Zeiss) Промышленное изделие. Получено 80 импульсов на
- 44. Интерполяция путём компарирования выпрямленных и делённых сигналов (Кафедра ИИТ ЛПИ) S − синусный сигнал C −
- 46. Скачать презентацию
ГЛАВА 3. ПРОСТРАНСТВЕННАЯ ОБЛАСТЬ ЦИТ
Содержание:
Объекты и шкалы пространственнóй области
Преобразователи положение→код
ГЛАВА 3. ПРОСТРАНСТВЕННАЯ ОБЛАСТЬ ЦИТ
Содержание:
Объекты и шкалы пространственнóй области
Преобразователи положение→код
ОБЪЕКТЫ ПРОСТРАНСТВЕННǑЙ ОБЛАСТИ
В пространственной области мы имеем
дело с относительными положениями
ОБЪЕКТЫ ПРОСТРАНСТВЕННǑЙ ОБЛАСТИ
В пространственной области мы имеем
дело с относительными положениями
СХОДСТВО И РАЗЛИЧИЯ ПРОСТРАНСТВЕННОЙ И ВРЕМЕННǑЙ ОБЛАСТЕЙ ЦИТ
Во временнóй области мы
СХОДСТВО И РАЗЛИЧИЯ ПРОСТРАНСТВЕННОЙ И ВРЕМЕННǑЙ ОБЛАСТЕЙ ЦИТ
Во временнóй области мы
Во временной области ЦИТ рассматривались шкалы стробов для датирования событий и
Во временной области ЦИТ рассматривались шкалы стробов для датирования событий и
Во временной области большую роль играют колебательные процессы, на основе которых
Во временной области большую роль играют колебательные процессы, на основе которых
Во временной области представление колебательного процесса вращающимся вектором наводило на мысль
Во временной области представление колебательного процесса вращающимся вектором наводило на мысль
Во временной области ЦИТ мы рассматривали прямые и обратные преобразования: длительность→код
Во временной области ЦИТ мы рассматривали прямые и обратные преобразования: длительность→код
ВИДЫ ШКАЛ ПРОСТРАНСТВЕННОЙ ОБЛАСТИ
Бóльшая часть шкал пространственной области представляет собой кодовые
ВИДЫ ШКАЛ ПРОСТРАНСТВЕННОЙ ОБЛАСТИ
Бóльшая часть шкал пространственной области представляет собой кодовые
ЧТО ЖЕ БУДЕТ РАССМАТРИВАТЬСЯ
В ЭТОЙ ГЛАВЕ?
(последнее подразделение с точки зрения
ЧТО ЖЕ БУДЕТ РАССМАТРИВАТЬСЯ
В ЭТОЙ ГЛАВЕ?
(последнее подразделение с точки зрения
ПРЕОБРАЗОВАТЕЛИ ПОЛОЖЕНИЕ→КОД С КОДОВЫМИ МАСКАМИ
Преобразователи с масками содержат одну или несколько
ПРЕОБРАЗОВАТЕЛИ ПОЛОЖЕНИЕ→КОД С КОДОВЫМИ МАСКАМИ
Преобразователи с масками содержат одну или несколько

Диск, кодированный натуральным двоичным кодом.
Тёмные участки − двоичные нули, светлые −
Диск, кодированный натуральным двоичным кодом.
Тёмные участки − двоичные нули, светлые −
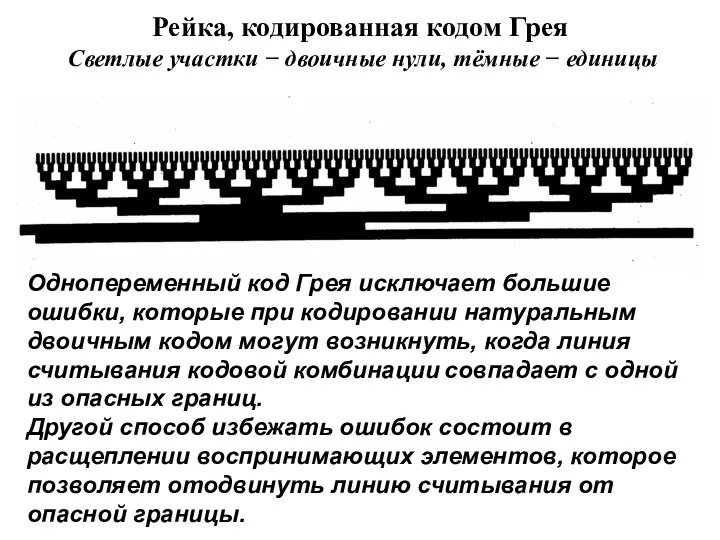
Рейка, кодированная кодом Грея
Светлые участки − двоичные нули, тёмные −
Рейка, кодированная кодом Грея Светлые участки − двоичные нули, тёмные −
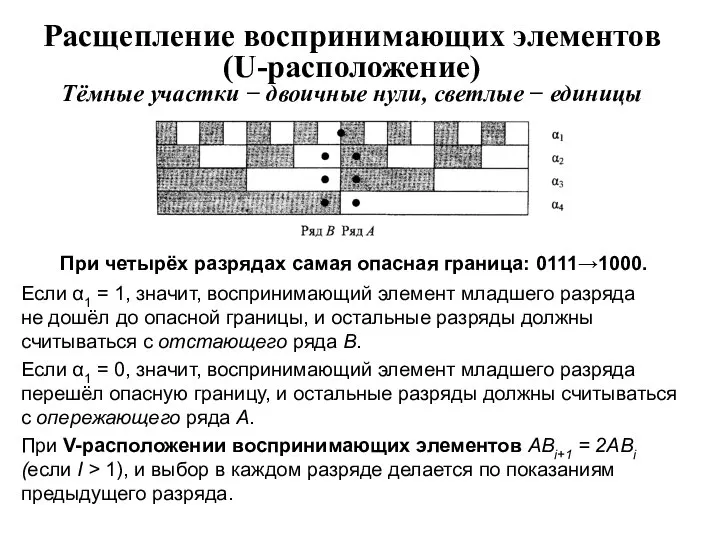
Расщепление воспринимающих элементов
(U-расположение)
Тёмные участки − двоичные нули, светлые − единицы
При четырёх
Расщепление воспринимающих элементов
(U-расположение)
Тёмные участки − двоичные нули, светлые − единицы
При четырёх

Абсолютный энкодер СКБ ИС
Абсолютный энкодер СКБ ИС

Абсолютный энкодер фирмы Autonics
Абсолютный энкодер фирмы Autonics
СИНУСНО-КОСИНУСНЫЕ СИГНАЛЫ
Пара сигналов постоянного или переменного тока, изменяющихся как Umsinx и
СИНУСНО-КОСИНУСНЫЕ СИГНАЛЫ
Пара сигналов постоянного или переменного тока, изменяющихся как Umsinx и

Синусно-косинусные вращающиеся трансформаторы − СКВТ
(resolvers)
Пример − продукция СКБ ИС
Синусно-косинусные вращающиеся трансформаторы − СКВТ
(resolvers)
Пример − продукция СКБ ИС
Следующие иллюстрации −
из статьи:
Следующие иллюстрации −
из статьи:
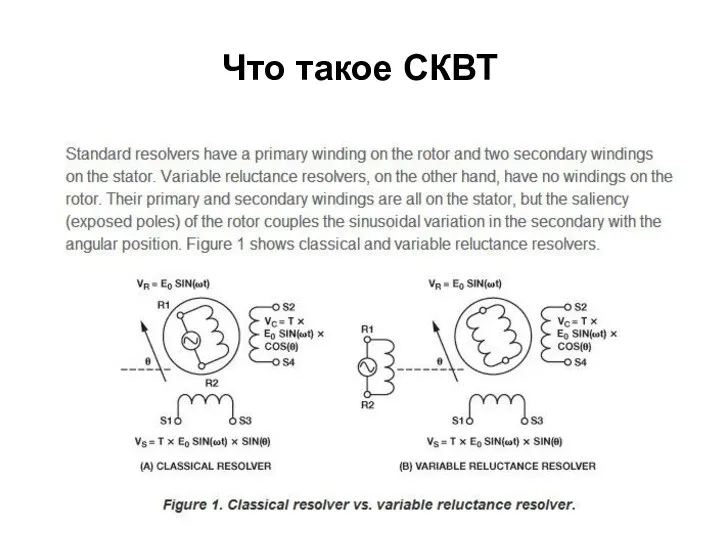
Что такое СКВТ
Что такое СКВТ
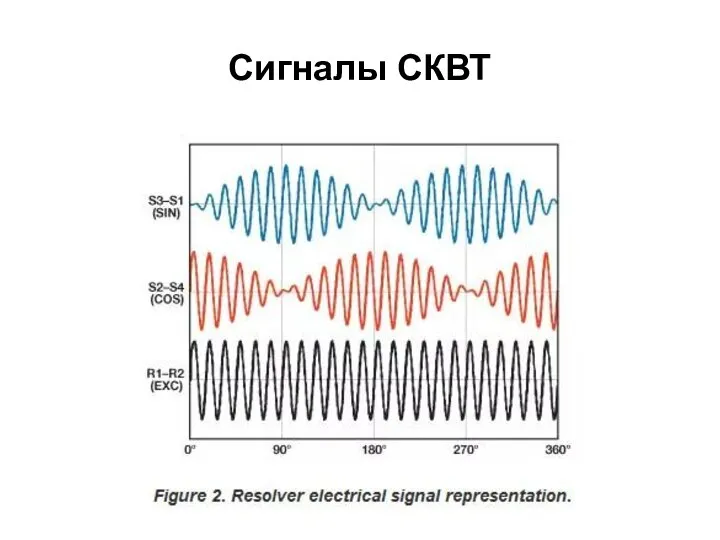
Сигналы СКВТ
Сигналы СКВТ
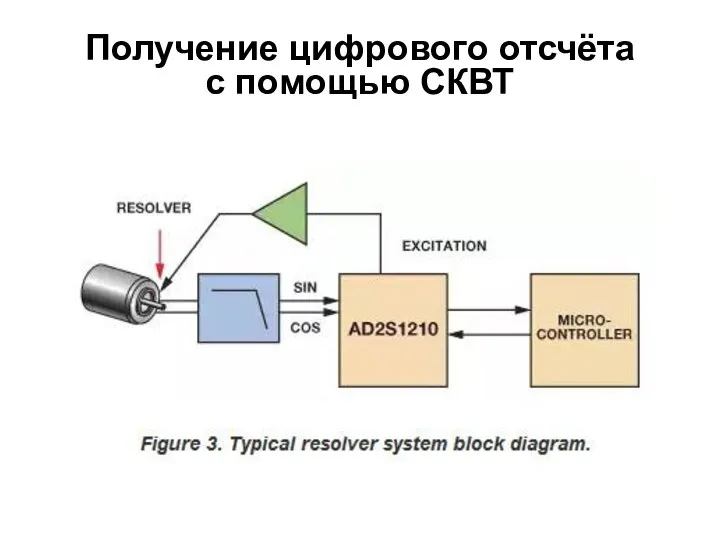
Получение цифрового отсчёта
с помощью СКВТ
Получение цифрового отсчёта
с помощью СКВТ
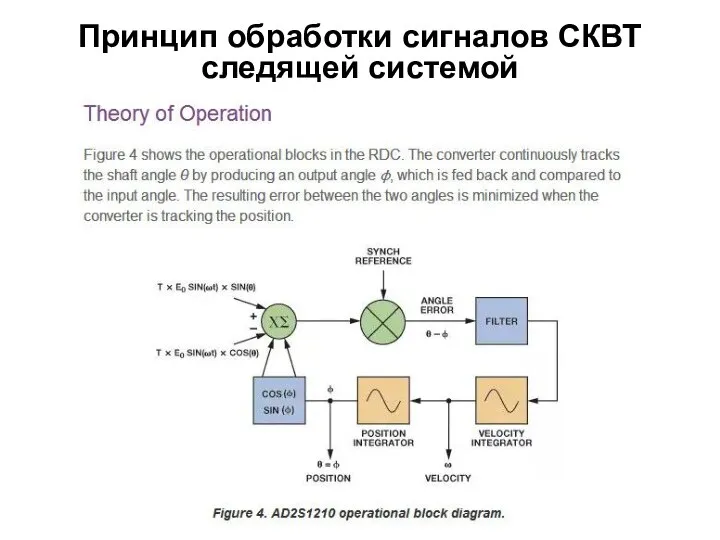
Принцип обработки сигналов СКВТ следящей системой
Принцип обработки сигналов СКВТ следящей системой
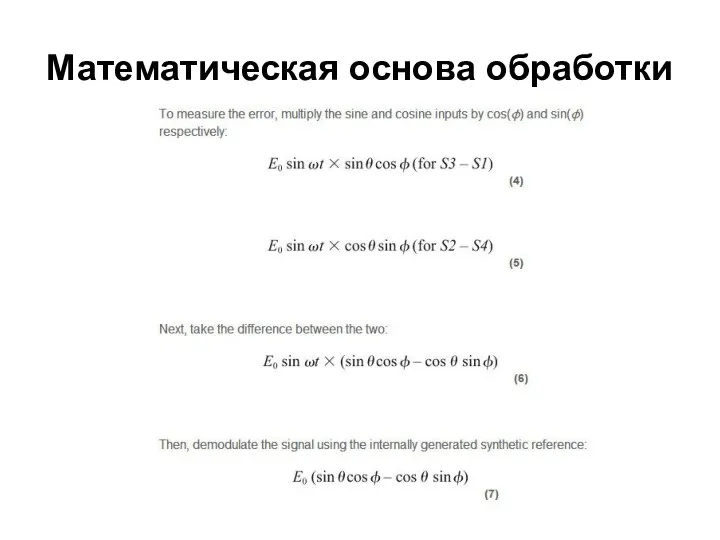
Математическая основа обработки
Математическая основа обработки
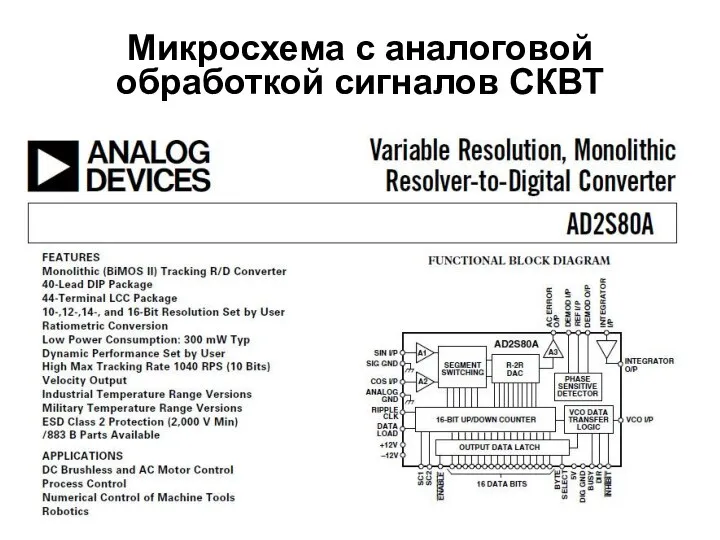
Микросхема с аналоговой обработкой сигналов СКВТ
Микросхема с аналоговой обработкой сигналов СКВТ
Навесные элементы аналоговой обработки сигналов СКВТ
Навесные элементы аналоговой обработки сигналов СКВТ

Соединение СКВТ с микросхемой
AD2S80A
Соединение СКВТ с микросхемой
AD2S80A
Более современная микросхема
Более современная микросхема

Соединение СКВТ с микросхемой
AD2S1210
Соединение СКВТ с микросхемой
AD2S1210
Имитация сигналов инкрементного энкодера
в микросхеме AD2S1210
Имитация сигналов инкрементного энкодера
в микросхеме AD2S1210
Следящая система −
не единственный способ
преобразования сигналов СКВТ
Например, возможен перевод пространственной
Следящая система −
не единственный способ
преобразования сигналов СКВТ
Например, возможен перевод пространственной
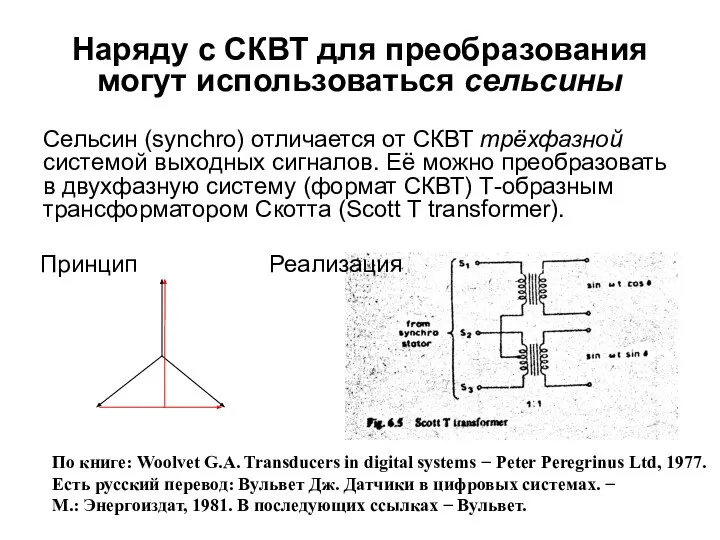
Наряду с СКВТ для преобразования
могут использоваться сельсины
Сельсин (synchro) отличается от СКВТ
Наряду с СКВТ для преобразования
могут использоваться сельсины
Сельсин (synchro) отличается от СКВТ

ПРИМЕНЕНИЯ ИНКРЕМЕНТНЫХ ЭНКОДЕРОВ
ПРИМЕНЕНИЯ ИНКРЕМЕНТНЫХ ЭНКОДЕРОВ
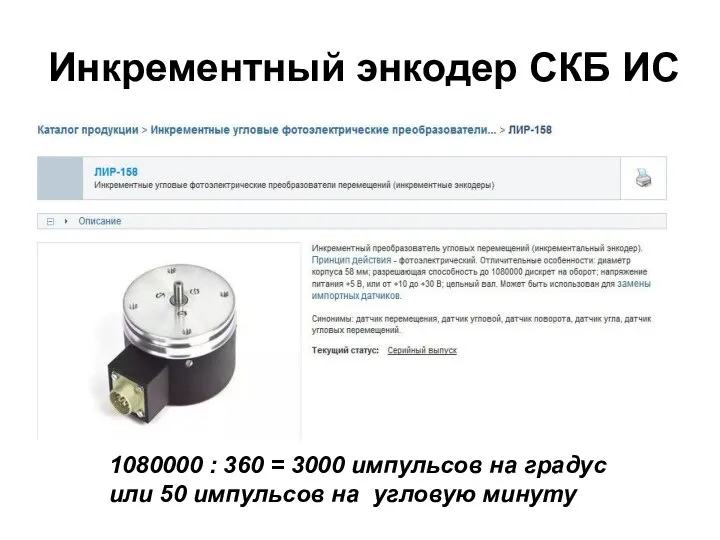
Инкрементный энкодер СКБ ИС
1080000 : 360 = 3000 импульсов на градус
Инкрементный энкодер СКБ ИС
1080000 : 360 = 3000 импульсов на градус

Инкрементный энкодер фирмы Autonics
Инкрементный энкодер фирмы Autonics
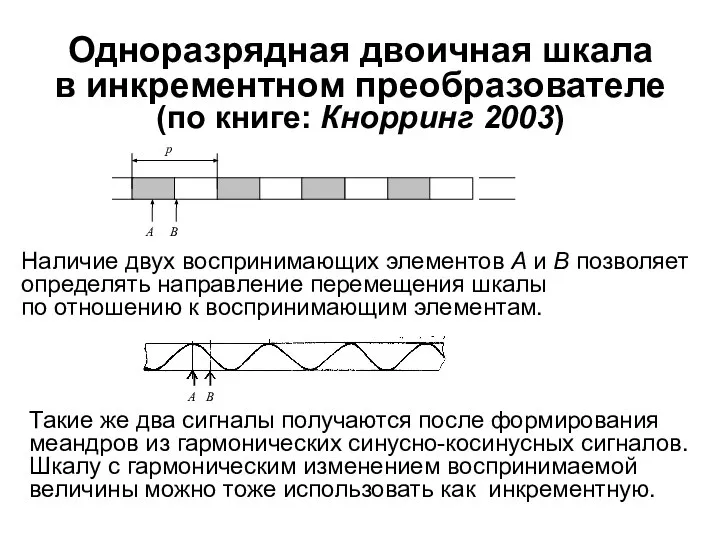
Одноразрядная двоичная шкала
в инкрементном преобразователе
(по книге: Кнорринг 2003)
Наличие двух воспринимающих
Одноразрядная двоичная шкала
в инкрементном преобразователе
(по книге: Кнорринг 2003)
Наличие двух воспринимающих
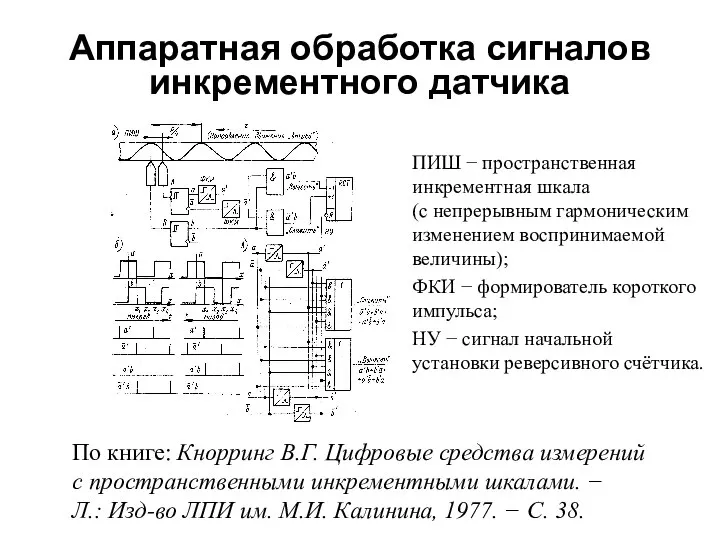
Аппаратная обработка сигналов инкрементного датчика
По книге: Кнорринг В.Г. Цифровые средства измерений
Аппаратная обработка сигналов инкрементного датчика
По книге: Кнорринг В.Г. Цифровые средства измерений
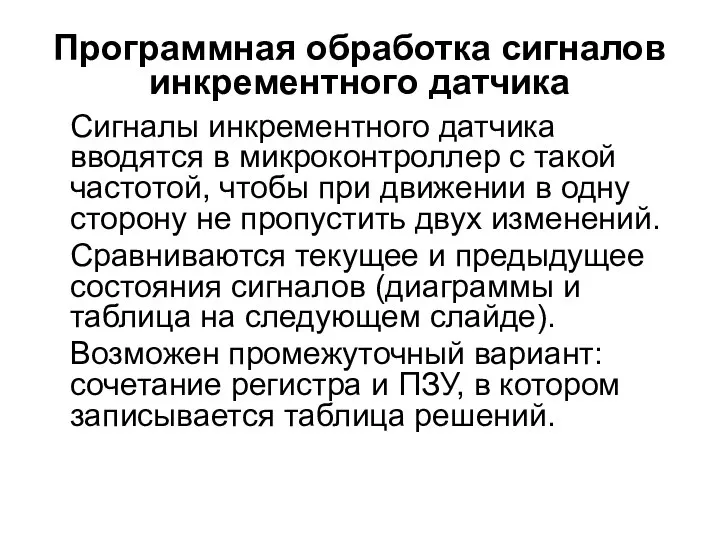
Программная обработка сигналов инкрементного датчика
Сигналы инкрементного датчика вводятся в микроконтроллер с
Программная обработка сигналов инкрементного датчика
Сигналы инкрементного датчика вводятся в микроконтроллер с
Предыдущее Текущее
a b a b
0 0 0 0
0 0 0 1
0 0 1 0
0 0 1 1
0 1 0 0
0 1 0 1
0 1 1 0
0 1 1 1
1 0 0 0
1 0 0 1
1 0 1 0
1 0 1 1
1 1 0 0
1 1 0 1
1 1 1 0
1 1 1 1
Решение
нет
вычесть
сложить
ошибка
сложить
нет
ошибка
вычесть
вычесть
ошибка
нет
сложить
ошибка
сложить
вычесть
нет
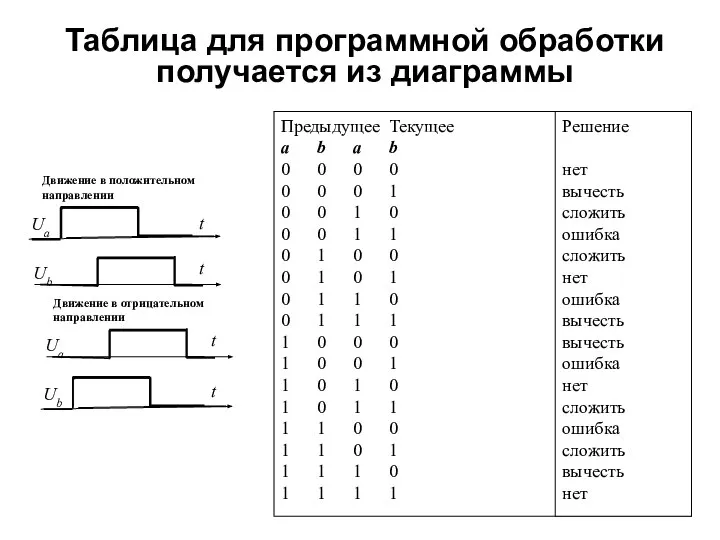
Таблица для программной обработки
получается из диаграммы
Предыдущее Текущее
a b a b
0 0 0 0
0 0 0 1
0 0 1 0
0 0 1 1
0 1 0 0
0 1 0 1
0 1 1 0
0 1 1 1
1 0 0 0
1 0 0 1
1 0 1 0
1 0 1 1
1 1 0 0
1 1 0 1
1 1 1 0
1 1 1 1
Решение
нет
вычесть
сложить
ошибка
сложить
нет
ошибка
вычесть
вычесть
ошибка
нет
сложить
ошибка
сложить
вычесть
нет
Таблица для программной обработки
получается из диаграммы
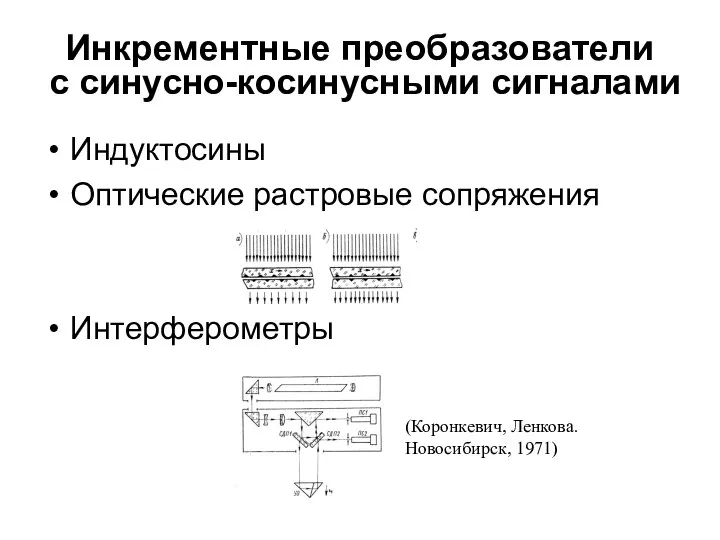
Инкрементные преобразователи
с синусно-косинусными сигналами
Индуктосины
Оптические растровые сопряжения
Интерферометры
(Коронкевич, Ленкова.
Новосибирск, 1971)
Инкрементные преобразователи
с синусно-косинусными сигналами
Индуктосины
Оптические растровые сопряжения
Интерферометры
(Коронкевич, Ленкова.
Новосибирск, 1971)
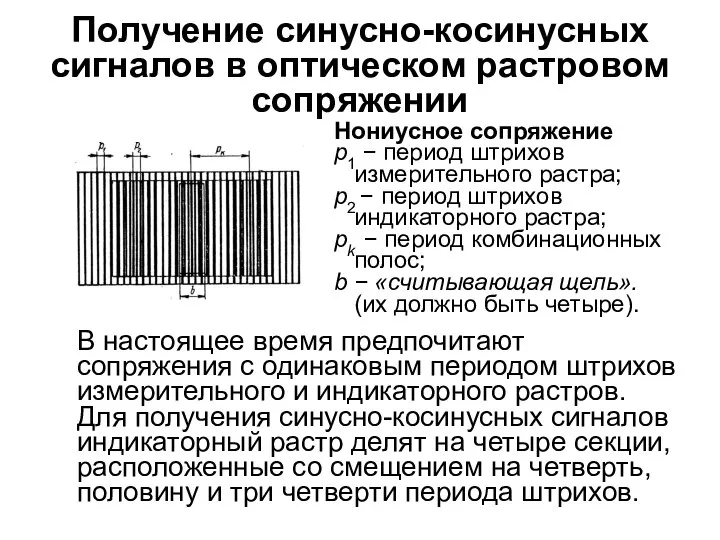
Получение синусно-косинусных сигналов в оптическом растровом сопряжении
В настоящее время предпочитают сопряжения
Получение синусно-косинусных сигналов в оптическом растровом сопряжении
В настоящее время предпочитают сопряжения
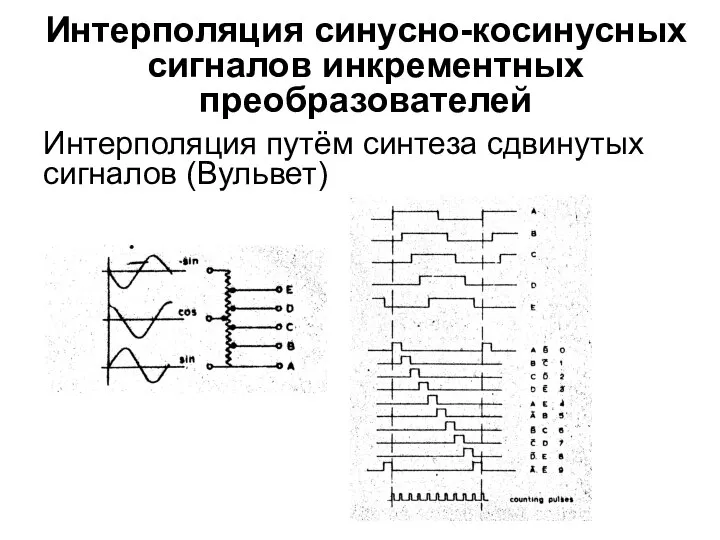
Интерполяция синусно-косинусных сигналов инкрементных преобразователей
Интерполяция путём синтеза сдвинутых
сигналов (Вульвет)
Интерполяция синусно-косинусных сигналов инкрементных преобразователей
Интерполяция путём синтеза сдвинутых
сигналов (Вульвет)
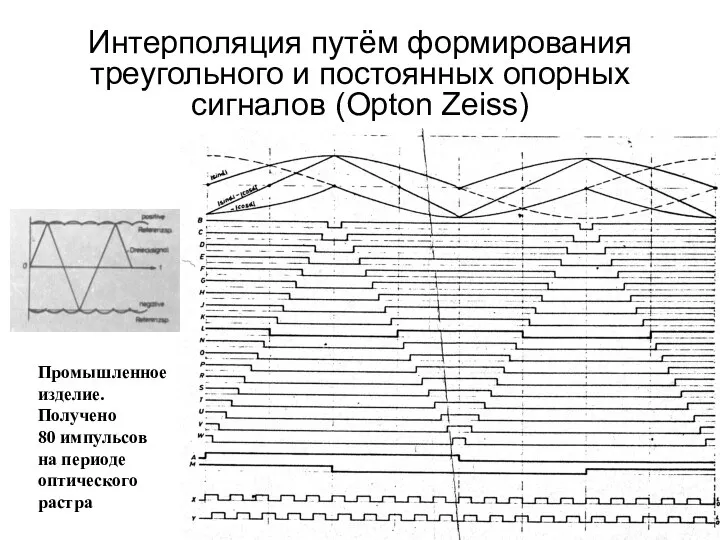
Интерполяция путём формирования
треугольного и постоянных опорных
сигналов (Opton Zeiss)
Промышленное
изделие.
Получено
80
Интерполяция путём формирования
треугольного и постоянных опорных
сигналов (Opton Zeiss)
Промышленное
изделие.
Получено
80
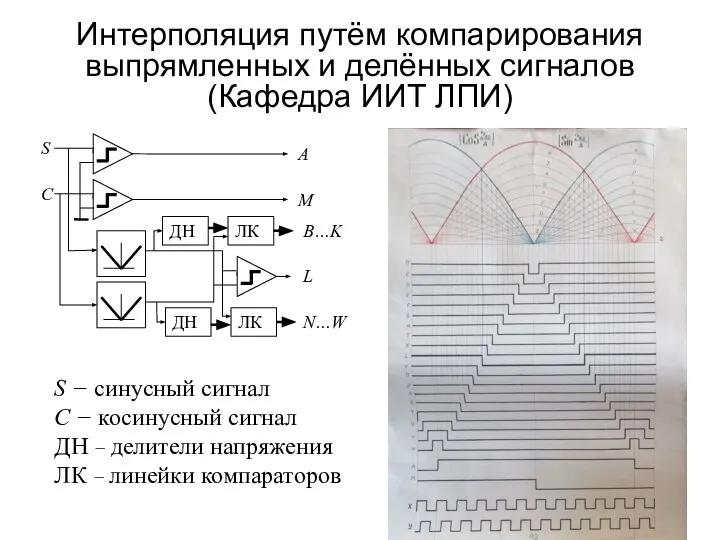
Интерполяция путём компарирования
выпрямленных и делённых сигналов (Кафедра ИИТ ЛПИ)
S −
Интерполяция путём компарирования
выпрямленных и делённых сигналов (Кафедра ИИТ ЛПИ)
S −
 Клубочек шерсти - презентация для начальной школы
Клубочек шерсти - презентация для начальной школы Исключения. Основные моменты
Исключения. Основные моменты Докладчик: В.И. Кырпа
Докладчик: В.И. Кырпа  Творческие коллективы и спортивные секции Чайковского индустриального колледжа
Творческие коллективы и спортивные секции Чайковского индустриального колледжа Теория и практика дизайна объектов в казуальной графике
Теория и практика дизайна объектов в казуальной графике Рококо
Рококо Спряжение глаголов
Спряжение глаголов Цирроз печени
Цирроз печени  a0056f77801d41fc95251661766df9ea
a0056f77801d41fc95251661766df9ea Губкин спортивный
Губкин спортивный ДЕСЯТИБАЛЬНАЯ СИСТЕМА ОЦЕНИВАНИЯ
ДЕСЯТИБАЛЬНАЯ СИСТЕМА ОЦЕНИВАНИЯ Кардиотонические средства
Кардиотонические средства  Загальна будова бойової машини піхоти БМП–2
Загальна будова бойової машини піхоти БМП–2 Структура проекта и приложения в среде Delphi. (Тема 3)
Структура проекта и приложения в среде Delphi. (Тема 3) Национальная безопасность. Роль и место России в мировом сообществе
Национальная безопасность. Роль и место России в мировом сообществе Экономическая теория
Экономическая теория 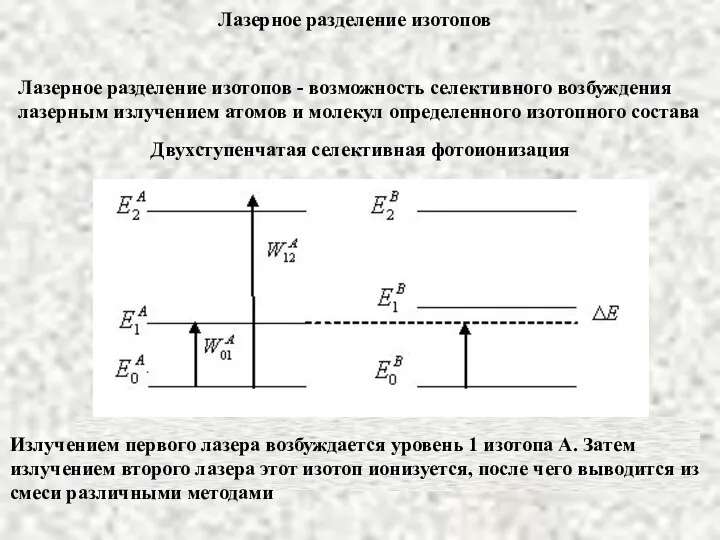 Лазерное разделение изотопов
Лазерное разделение изотопов  Православный иконостас
Православный иконостас  Pest-анализ АО «РАХАТ»
Pest-анализ АО «РАХАТ» Генеративные органы. Морфология соцветия, цветка.
Генеративные органы. Морфология соцветия, цветка. Презентация СВР (Служба внешней разведки)
Презентация СВР (Служба внешней разведки) Барсовой горы снежинки
Барсовой горы снежинки Госпитальные инфекции
Госпитальные инфекции Что такое CIDR и какие задачи позволяет решить? Администрирование вычислительных сетей. Лекция 7
Что такое CIDR и какие задачи позволяет решить? Администрирование вычислительных сетей. Лекция 7 синий - презентация для начальной школы
синий - презентация для начальной школы 第二课. Урок 2
第二课. Урок 2 История экономической мысли
История экономической мысли Ежедневная организация жизни и деятельности детей в образовательном учреждении
Ежедневная организация жизни и деятельности детей в образовательном учреждении