- Кинематика

Содержание
- 2. Общая схема кинематики
- 3. W = 0 – движение равномерное, W = const – равнопеременное движение, А) const > 0
- 4. V – модуль скорости точки. Направлен по касательной к траектории точки. Направлено в сторону вогнутости траектории.
- 5. 2.2.2 Скорости и ускорения материальной точки Если закон движения задан: в векторном виде: в координатном виде:
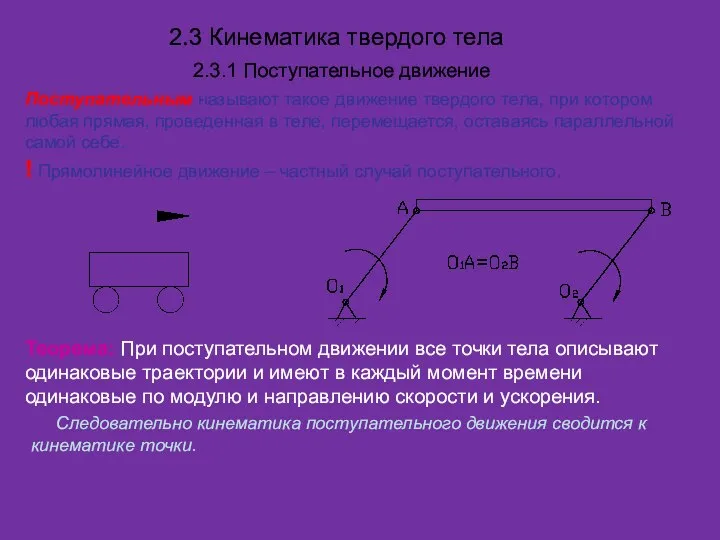
- 6. 2.3 Кинематика твердого тела 2.3.1 Поступательное движение Поступательным называют такое движение твердого тела, при котором любая
- 7. 2.3.2 Вращательное движение твердого тела Вращательным называется такое движение твердого тела, при котором какие-нибудь две точки,
- 8. Равномерное и равнопеременное вращение - вращение называют равномерным. Пусть при t = 0 - закон движения
- 9. 2.3.3 Скорости и ускорения точек вращающегося тела Точка М описывает окружность. – линейная или окружная скорость
- 10. 2.3.4 Плоскопараллельное движение твердого тела Плоскопараллельным или плоским движением твердого тела называется такое движение, при котором
- 11. Траектории точек тела Положение точки М на сечении S определяется: расстоянием ; углом . Координаты точки
- 12. Определение линейных скоростей точек звеньев механизма Построение плана скоростей начнём с ведущего звена О1А, которое вращается
- 13. Вектор абсолютной скорости совпадает с вектором относительной скорости . Скорость О2 равна нулю, так как этот
- 14. Схема механизма Величину рс находим из пропорции: Система уравнений для скорости точки D будет иметь следующий
- 15. Мгновенным центром скоростей (МЦС) называется точка сечения S тела, скорость которой в данный момент времени равна
- 16. Геометрическое место МЦВ на неподвижной плоскости называют неподвижной центроидой, а геометрическое место этих центров в плоскости,
- 17. Ускорения точек тела. При плоскопараллельном движении ускорение любой точки (так же как и скорость) складывается из
- 18. Для определения направления угловой скорости второго звена ω2 необходимо мысленно перенести вектор относительной скорости из плана
- 19. Масштабный коэффициент плана ускорений: Определим ускорение точки В. Схема механизма Т.к. точка В движется криволинейно, то
- 20. Для определения ускорения точки C воспользуемся свойством подобия: Система уравнений для ускорения точки D будет имеет
- 22. Скачать презентацию

Общая схема кинематики
Общая схема кинематики
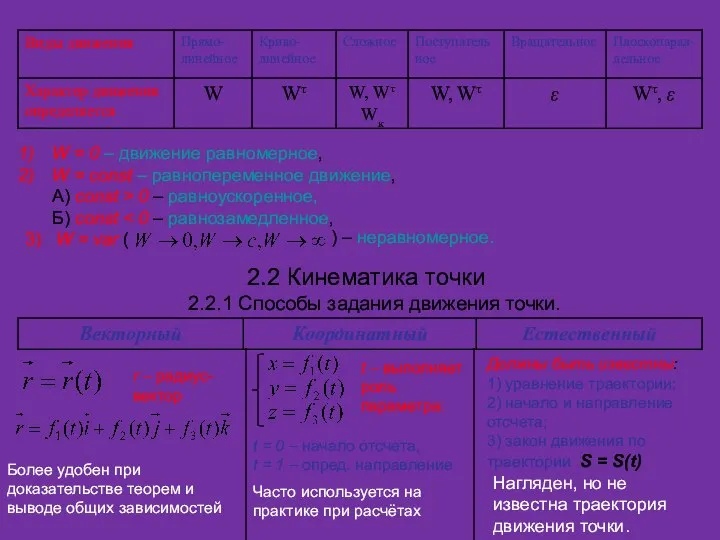
W = 0 – движение равномерное,
W = const – равнопеременное движение,
А)
W = 0 – движение равномерное,
W = const – равнопеременное движение,
А)
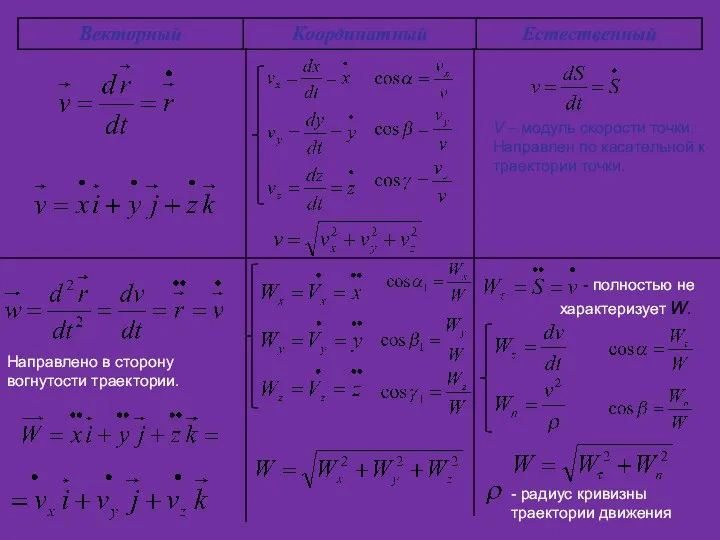
V – модуль скорости точки.
Направлен по касательной к траектории точки.
Направлено
V – модуль скорости точки.
Направлен по касательной к траектории точки.
Направлено
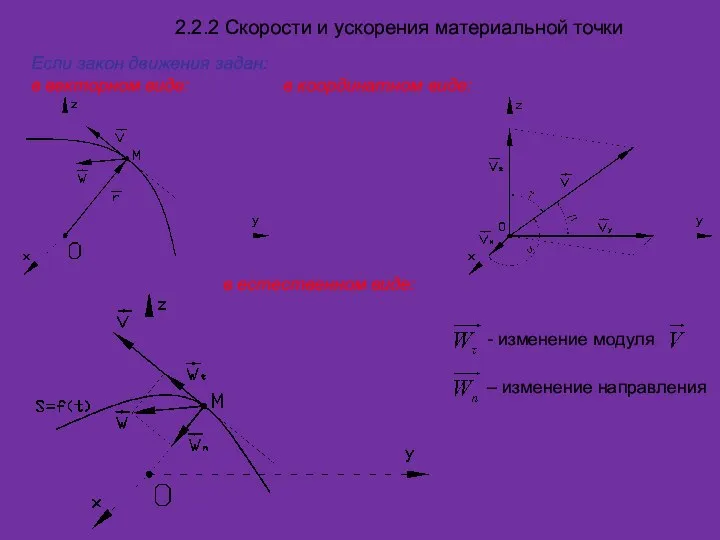
2.2.2 Скорости и ускорения материальной точки
Если закон движения задан:
в
2.2.2 Скорости и ускорения материальной точки
Если закон движения задан:
в
2.3 Кинематика твердого тела
2.3.1 Поступательное движение
Поступательным называют такое движение
2.3 Кинематика твердого тела
2.3.1 Поступательное движение
Поступательным называют такое движение
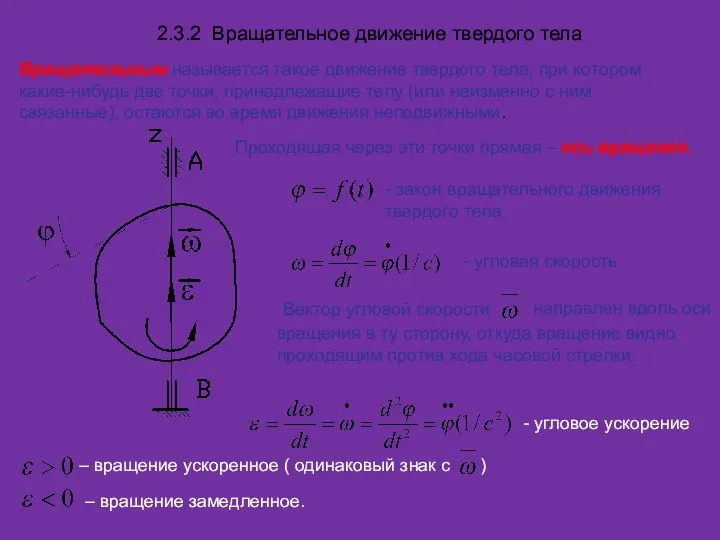
2.3.2 Вращательное движение твердого тела
Вращательным называется такое движение твердого тела,
2.3.2 Вращательное движение твердого тела
Вращательным называется такое движение твердого тела,
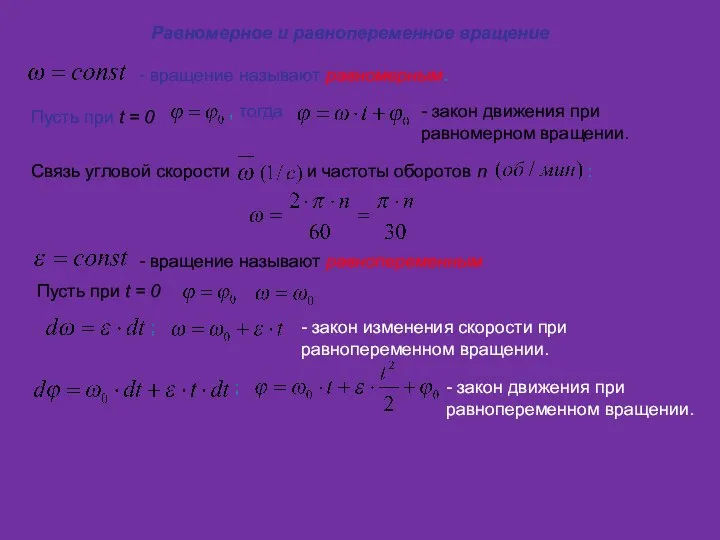
Равномерное и равнопеременное вращение
- вращение называют равномерным.
Пусть при t
Равномерное и равнопеременное вращение
- вращение называют равномерным.
Пусть при t
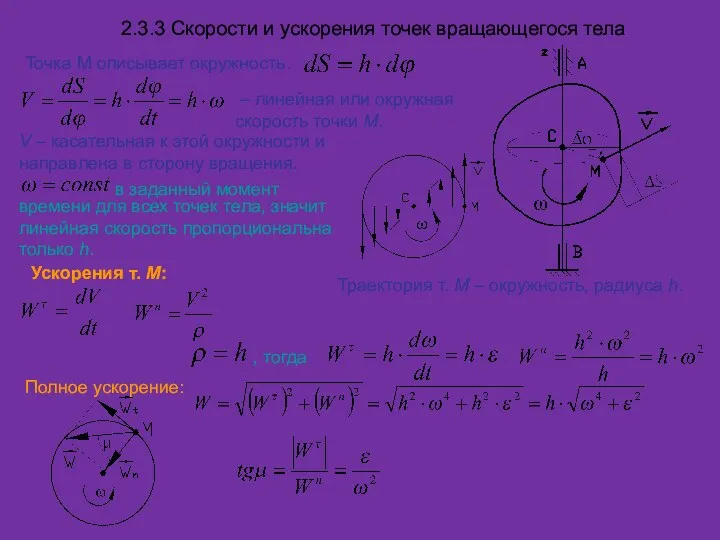
2.3.3 Скорости и ускорения точек вращающегося тела
Точка М описывает окружность.
2.3.3 Скорости и ускорения точек вращающегося тела
Точка М описывает окружность.
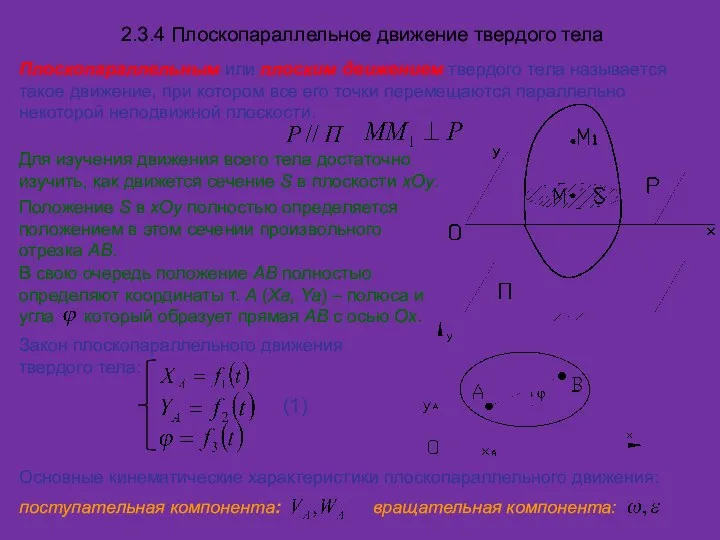
2.3.4 Плоскопараллельное движение твердого тела
Плоскопараллельным или плоским движением твердого тела
2.3.4 Плоскопараллельное движение твердого тела
Плоскопараллельным или плоским движением твердого тела
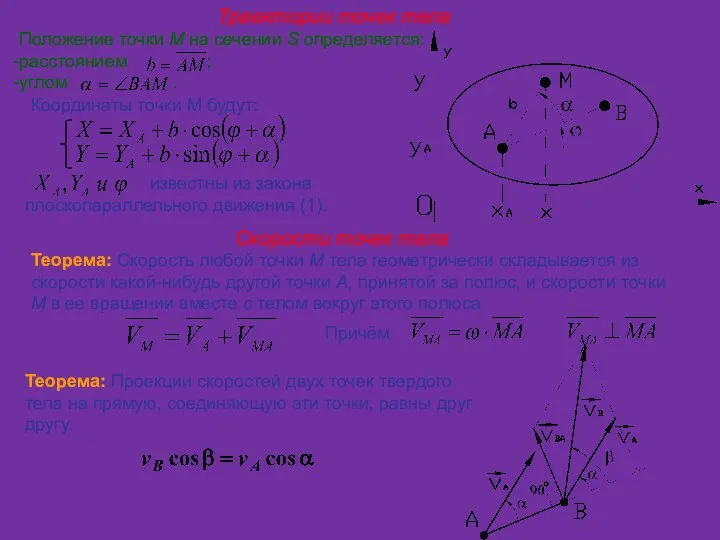
Траектории точек тела
Положение точки М на сечении S определяется:
расстоянием ;
углом
Траектории точек тела
Положение точки М на сечении S определяется:
расстоянием ;
углом
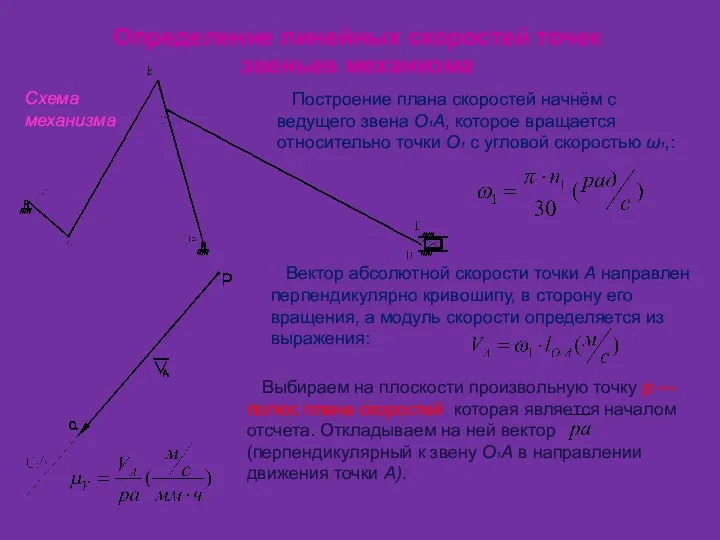
Определение линейных скоростей точек
звеньев механизма
Построение плана скоростей начнём с
Определение линейных скоростей точек
звеньев механизма
Построение плана скоростей начнём с

Вектор абсолютной скорости
совпадает с вектором относительной скорости .
Скорость О2 равна
Вектор абсолютной скорости
совпадает с вектором относительной скорости .
Скорость О2 равна
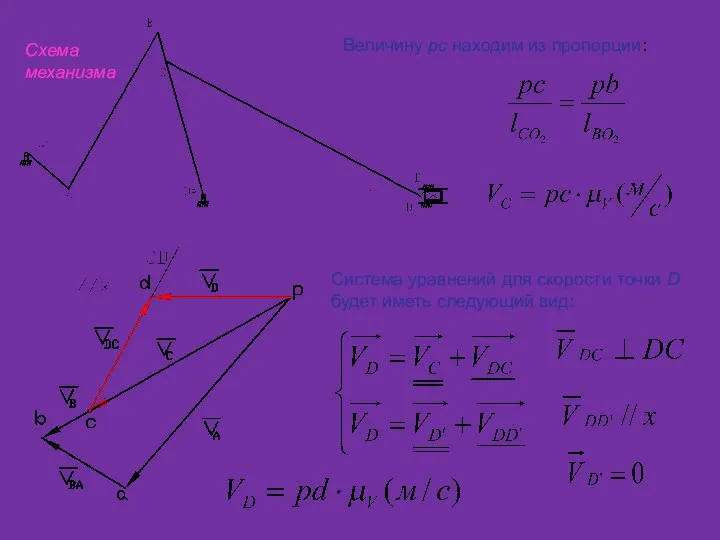
Схема механизма
Величину рс находим из пропорции:
Система уравнений для скорости точки
Схема механизма
Величину рс находим из пропорции:
Система уравнений для скорости точки
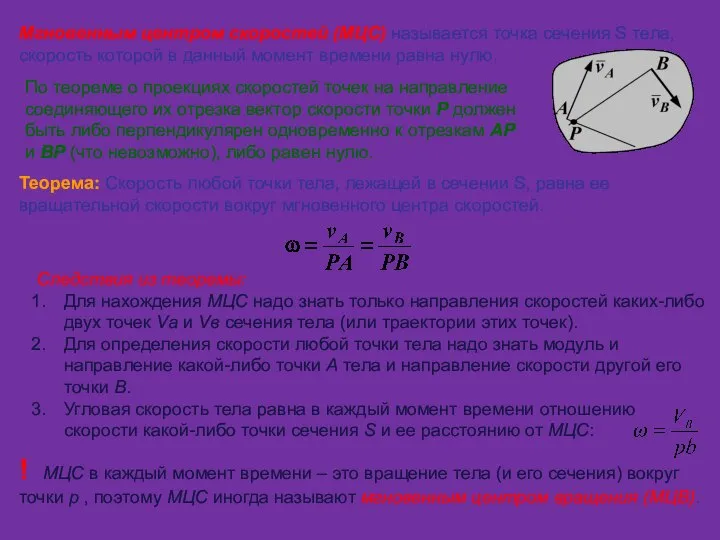
Мгновенным центром скоростей (МЦС) называется точка сечения S тела, скорость которой
Мгновенным центром скоростей (МЦС) называется точка сечения S тела, скорость которой
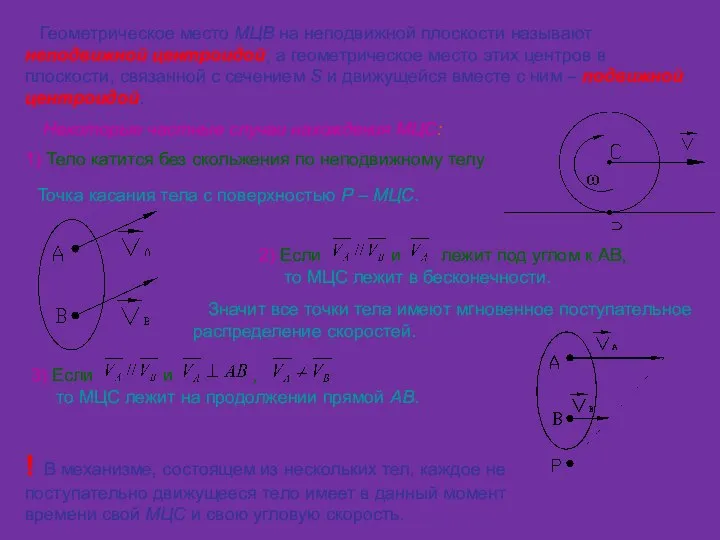
Геометрическое место МЦВ на неподвижной плоскости называют неподвижной центроидой, а
Геометрическое место МЦВ на неподвижной плоскости называют неподвижной центроидой, а
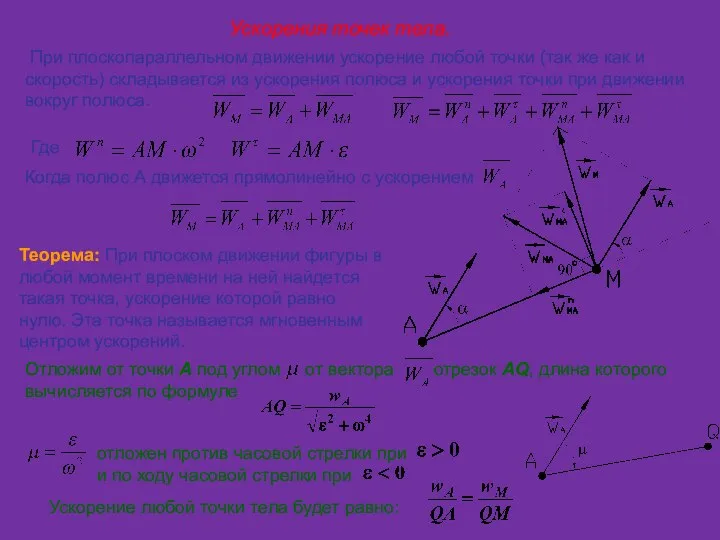
Ускорения точек тела.
При плоскопараллельном движении ускорение любой точки (так
Ускорения точек тела.
При плоскопараллельном движении ускорение любой точки (так
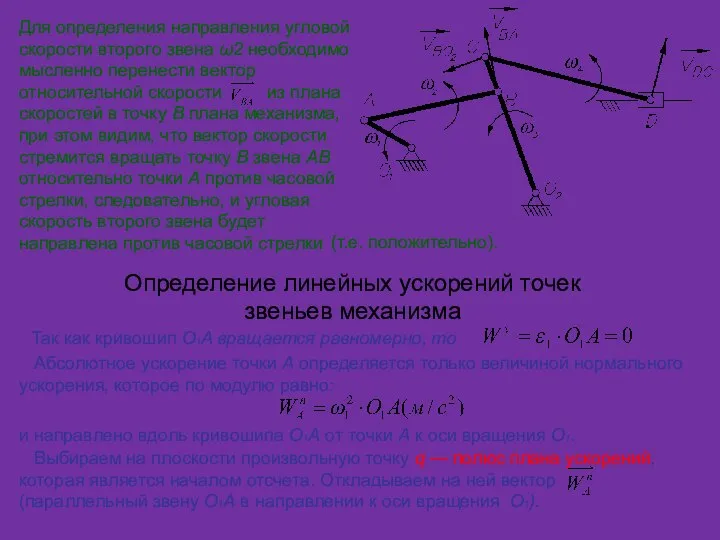
Для определения направления угловой скорости второго звена ω2 необходимо мысленно перенести
Для определения направления угловой скорости второго звена ω2 необходимо мысленно перенести
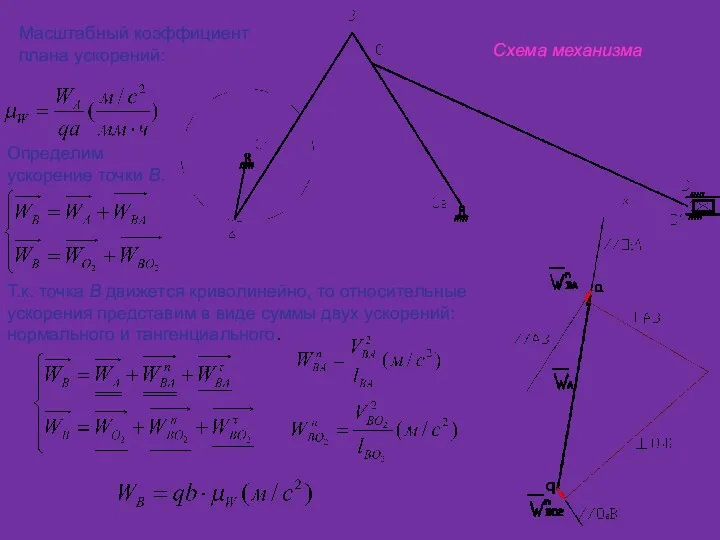
Масштабный коэффициент плана ускорений:
Определим ускорение точки В.
Схема механизма
Т.к. точка
Масштабный коэффициент плана ускорений:
Определим ускорение точки В.
Схема механизма
Т.к. точка
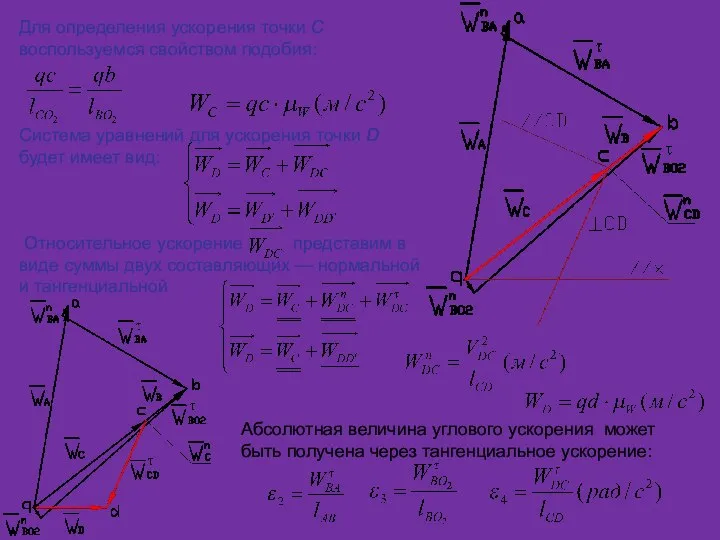
Для определения ускорения точки C воспользуемся свойством подобия:
Система уравнений для
Для определения ускорения точки C воспользуемся свойством подобия:
Система уравнений для
 Мониторинг рН желудка и пищевода в оценке антисекреторного действия лекарственных средств к.мед.н. Просоленко К.А. Институт терап
Мониторинг рН желудка и пищевода в оценке антисекреторного действия лекарственных средств к.мед.н. Просоленко К.А. Институт терап Глава 3 Спрос, предложение и рыночное равновесие
Глава 3 Спрос, предложение и рыночное равновесие  Роль музыки в жизни человека Авторы: Яровая Анна Тишенина Влада ученицы 10 «А» класса МОУСОШ №7 Руководитель проекта: Шматько На
Роль музыки в жизни человека Авторы: Яровая Анна Тишенина Влада ученицы 10 «А» класса МОУСОШ №7 Руководитель проекта: Шматько На Агбис
Агбис Внешнее трение
Внешнее трение ТренажёрСложение в пределах 20 - презентация для начальной школы
ТренажёрСложение в пределах 20 - презентация для начальной школы Рубежно – зачетная работа по системам компьютерной графики
Рубежно – зачетная работа по системам компьютерной графики  Қазақ кәдесілер
Қазақ кәдесілер Микросхемы с программируемой структурой
Микросхемы с программируемой структурой Технология совершенствования двигательных действий лыжников-спринтеров
Технология совершенствования двигательных действий лыжников-спринтеров Основные инструменты формирования служебно-профессиональной морали и нравственности культуры государственных гражданских служ
Основные инструменты формирования служебно-профессиональной морали и нравственности культуры государственных гражданских служ Правописание -ЧИК - ЩИК (с упражнениями)
Правописание -ЧИК - ЩИК (с упражнениями)  Мотострелковый (танковый) взвод в различный видах боя
Мотострелковый (танковый) взвод в различный видах боя Архитектурные достижения Древнего Рима
Архитектурные достижения Древнего Рима Андрей Николаев Художник, иллюстрирующий всемирно известное произведение литературы, должен быть готов умереть в писателе.
Андрей Николаев Художник, иллюстрирующий всемирно известное произведение литературы, должен быть готов умереть в писателе. Цифровые видеокамеры
Цифровые видеокамеры Презентация Аутсорсинг
Презентация Аутсорсинг Урок в 7 классе по теме: Решение задач с помощью уравнений. Учитель: Барышенская Елена Ивановна
Урок в 7 классе по теме: Решение задач с помощью уравнений. Учитель: Барышенская Елена Ивановна  Глобальные проблемы человечества
Глобальные проблемы человечества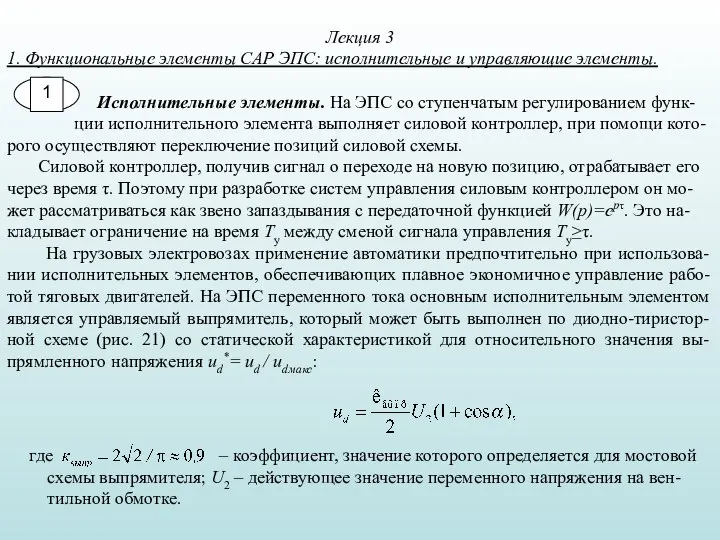 Функциональные элементы САР ЭПС: исполнительные и управляющие элементы
Функциональные элементы САР ЭПС: исполнительные и управляющие элементы Білорусь та її національні страви
Білорусь та її національні страви Тайна одной семьи: на примере жизненного пути Салихова Губайдуллы Зарифовича
Тайна одной семьи: на примере жизненного пути Салихова Губайдуллы Зарифовича Как пишутся иконы
Как пишутся иконы Качество жизни и качество медицинской помощи по мнению населения геронтологической группы Туребеков Думан Кажибаевич к.м.н., д
Качество жизни и качество медицинской помощи по мнению населения геронтологической группы Туребеков Думан Кажибаевич к.м.н., д Презентация "Модели жизненных циклов организации" - скачать презентации по Экономике
Презентация "Модели жизненных циклов организации" - скачать презентации по Экономике Программирование на языке Си. Переменные. Ввод и вывод. Ветвления. Сложные условия. Циклы с условием
Программирование на языке Си. Переменные. Ввод и вывод. Ветвления. Сложные условия. Циклы с условием Хуже грозного царя только междуцарствие - презентация для начальной школы_
Хуже грозного царя только междуцарствие - презентация для начальной школы_ Задачи в стихах Часть 1
Задачи в стихах Часть 1