- Машины Тьюринга

Содержание
- 2. § 6.1. Неформальное и формальное описания В этой главе мы рассмотрим еще один тип распознающих устройств
- 3. Было предложено много других формализаций процедуры, и было показано, что все они эквивалентны формализации машины Тьюринга.
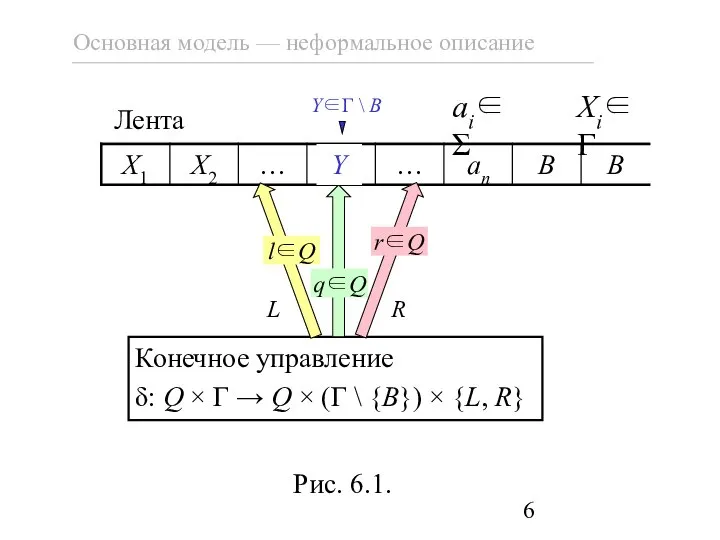
- 4. Основная модель (см. рис. 6.1) имеет конечное управление, ленту, которая раз-делена на ячейки, и головку ленты,
- 5. Каждая ячейка может содержать ровно один из конечного числа символов ленты. Первоначально n крайних левых ячеек
- 6. q0∈Q Конечное управление δ: Q × Γ → Q × (Γ \ {B}) × {L, R}
- 7. В один такт, зависящий от символа, сканируемого головкой ленты, и состояния конечного управления, машина Тьюринга 1)
- 8. Определение 6.1. Машина Тьюринга (Tm) является формальной системой: T = (Q, Σ, Γ, δ, q0, F),
- 9. Заметим, что если головка ленты покидает ячейку, она должна напечатать непустой символ в этой ячейке, так
- 10. Мы не позволили Tm печатать пробел ради простоты определения конфигураций. Однако, Tm могла бы иметь другой
- 17. Два других случая, когда Tm останавливается, однако, не принимая: когда значение δ(q, X) при некоторых q∈Q
- 18. Пример 6.1. Построим Tm, распоз-нающую cfl L = {0n1n | n ≥ 1}. Положим T =
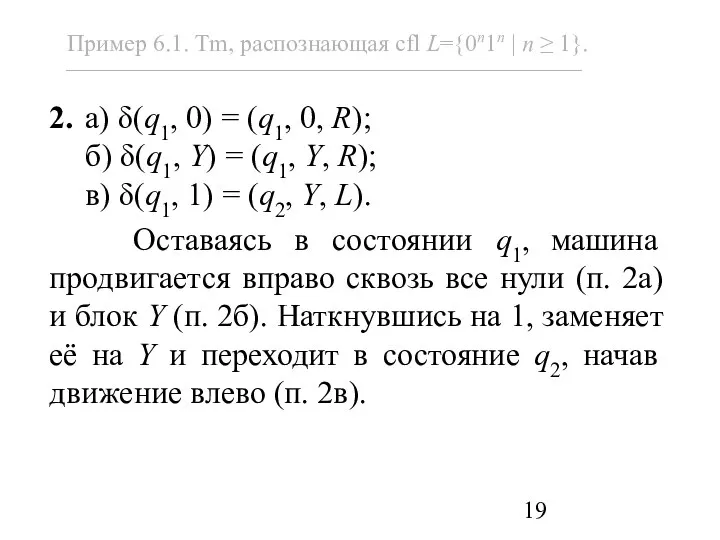
- 19. 2. а) δ(q1, 0) = (q1, 0, R); б) δ(q1, Y) = (q1, Y, R); в)
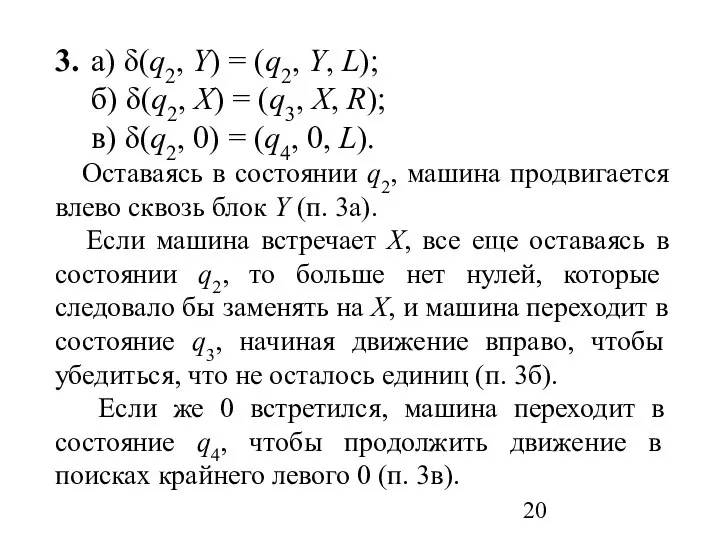
- 20. 3. а) δ(q2, Y) = (q2, Y, L); б) δ(q2, X) = (q3, X, R); в)
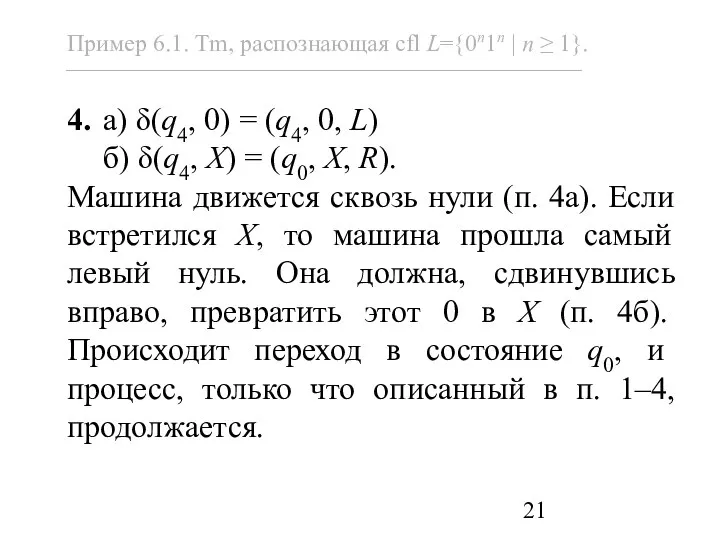
- 21. 4. а) δ(q4, 0) = (q4, 0, L) б) δ(q4, X) = (q0, X, R). Машина
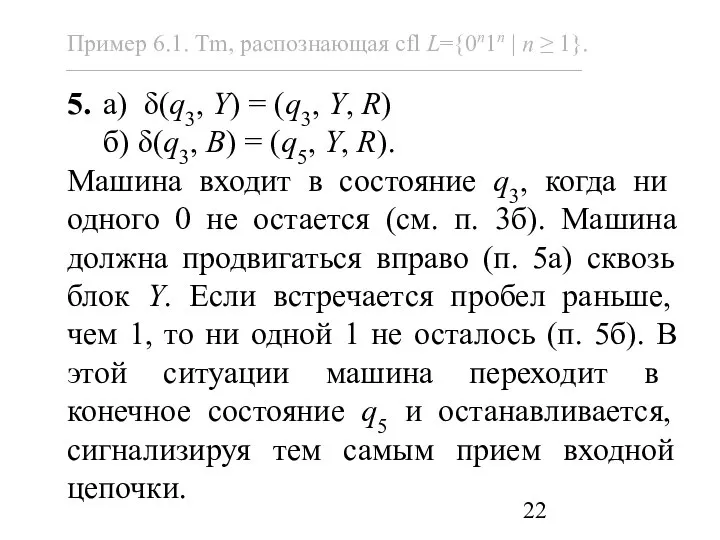
- 22. 5. а) δ(q3, Y) = (q3, Y, R) б) δ(q3, B) = (q5, Y, R). Машина
- 23. 6. Во всех случаях, кроме 1–5, функция δ не определена. Рассмотрим действия машины Тьюринга на входной
- 24. Таблица 6.1
- 25. § 6.2. Методы построения машин Тьюринга Машина Тьюринга может “програм-мироваться” во многом так же, как программируются
- 26. § 6.3. Машина Тьюринга как процедура До сих пор мы определяли машину Тьюринга как распознающее устройство.
- 27. Машина Тьюринга в примере 6.1 используется как распознаватель. Заметим, что на некоторых входных цепочках, эта машина
- 28. Следует подчеркнуть, что существуют языки, которые принимаются машинами Тьюринга, не останавливающимися для некоторых цепочек, не содержащихся
- 29. Когда машина Тьюринга рассматри-вается как процедура и оказывается, что она останавливается для всех входных цепочек, то
- 30. Есть процедуры, для которых не существует никакого соответствующего алгоритма. Примером является процедура для определения, порождает ли
- 31. К каждой цепочке эта машина Тьюринга применяет алгоритм, данный в гл. 2, чтобы увидеть, порождается ли
- 32. Имеет место факт, что не существует машины Тьюринга, которая останавли-вается на всех входных цепочках и определяет
- 33. § 6.4. Модификации машин Тьюринга Одна из причин, по которой машины Тьюринга принимаются в качестве общей
- 34. 6.4.1. Машина Тьюринга с бесконечной лентой в обе стороны Теорема 6.1. Если язык L распознается машиной
- 35. 6.4.2. Многоленточная машина Тьюринга состоит из конечного управления с k ленточными головками, по одной на каждой
- 36. При одном движении, зависящем от состояния конечного управления и сканируемого символа каждой из ленточных головок, машина
- 37. Теорема 6.2. Если язык L принимается многоленточной машиной Тьюринга, то он принимается одноленточной машиной Тьюринга.
- 38. 6.4.3. Недетерминированная машина Тьюринга есть устройство с конечным управлением и одной бесконечной в обе стороны лентой.
- 39. Теорема 6.3. Если язык L принимается недетерминированной машиной Тьюринга T1, то он принимается некоторой детерми-нированной машиной
- 40. Тогда любая последовательность вариан-тов движений конечной длины может быть представлена последовательностью цифр от 1 до r.
- 41. Можно построить детерминированную машину Тьюринга T2, моделирующую машину T1. Снабдим её тремя лентами. Лента 1 будет
- 42. Для каждой последовательности цифр, сгенерированной на ленте 2, машина T2 копирует вход на ленту 3 и
- 43. Если машина T1 входит в принимающее состояние, то машина T2 также принимает. Если имеется последовательность вариантов,
- 45. Скачать презентацию
§ 6.1. Неформальное и
формальное описания
В этой главе мы
§ 6.1. Неформальное и
формальное описания
В этой главе мы
Было предложено много других формализаций процедуры, и было показано, что
Было предложено много других формализаций процедуры, и было показано, что
Основная модель (см. рис. 6.1) имеет конечное управление, ленту, которая
Основная модель (см. рис. 6.1) имеет конечное управление, ленту, которая
Каждая ячейка может содержать ровно один из конечного числа символов
Каждая ячейка может содержать ровно один из конечного числа символов
q0∈Q
Конечное управление
δ: Q × Γ → Q × (Γ \ {B})
q0∈Q
Конечное управление
δ: Q × Γ → Q × (Γ \ {B})
В один такт, зависящий от символа, сканируемого головкой ленты, и
В один такт, зависящий от символа, сканируемого головкой ленты, и
Определение 6.1. Машина Тьюринга (Tm) является формальной системой:
T =
Определение 6.1. Машина Тьюринга (Tm) является формальной системой:
T =
Заметим, что если головка ленты покидает ячейку, она должна напечатать
Заметим, что если головка ленты покидает ячейку, она должна напечатать
Мы не позволили Tm печатать пробел ради простоты определения конфигураций.
Мы не позволили Tm печатать пробел ради простоты определения конфигураций.

Два других случая, когда Tm останавливается, однако, не принимая:
когда
Два других случая, когда Tm останавливается, однако, не принимая:
когда
Пример 6.1. Построим Tm, распоз-нающую cfl L = {0n1n |
Пример 6.1. Построим Tm, распоз-нающую cfl L = {0n1n |
2. а) δ(q1, 0) = (q1, 0, R);
б) δ(q1, Y) = (q1,
2. а) δ(q1, 0) = (q1, 0, R);
б) δ(q1, Y) = (q1,
3. а) δ(q2, Y) = (q2, Y, L);
б) δ(q2, X) = (q3,
3. а) δ(q2, Y) = (q2, Y, L);
б) δ(q2, X) = (q3,
4. а) δ(q4, 0) = (q4, 0, L)
б) δ(q4, X) = (q0,
4. а) δ(q4, 0) = (q4, 0, L)
б) δ(q4, X) = (q0,
5. а) δ(q3, Y) = (q3, Y, R)
б) δ(q3, B) = (q5,
5. а) δ(q3, Y) = (q3, Y, R)
б) δ(q3, B) = (q5,
6. Во всех случаях, кроме 1–5, функция δ не определена.
Рассмотрим
6. Во всех случаях, кроме 1–5, функция δ не определена.
Рассмотрим
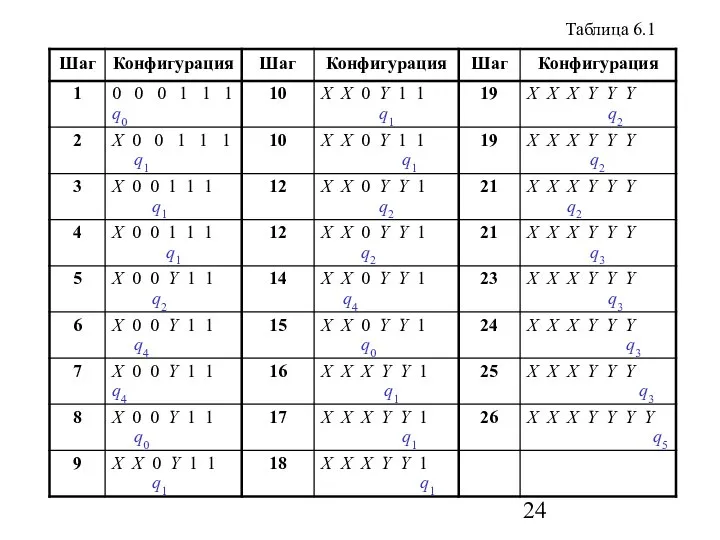
Таблица 6.1
Таблица 6.1
§ 6.2. Методы построения
машин Тьюринга
Машина Тьюринга может “програм-мироваться” во
§ 6.2. Методы построения
машин Тьюринга
Машина Тьюринга может “програм-мироваться” во
§ 6.3. Машина Тьюринга
как процедура
До сих пор мы определяли
§ 6.3. Машина Тьюринга
как процедура
До сих пор мы определяли
Машина Тьюринга в примере 6.1 используется как распознаватель. Заметим, что
Машина Тьюринга в примере 6.1 используется как распознаватель. Заметим, что
Следует подчеркнуть, что существуют языки, которые принимаются машинами Тьюринга, не
Следует подчеркнуть, что существуют языки, которые принимаются машинами Тьюринга, не
Когда машина Тьюринга рассматри-вается как процедура и оказывается, что она
Когда машина Тьюринга рассматри-вается как процедура и оказывается, что она
Есть процедуры, для которых не существует никакого соответствующего алгоритма.
Есть процедуры, для которых не существует никакого соответствующего алгоритма.
К каждой цепочке эта машина Тьюринга применяет алгоритм, данный в гл.
К каждой цепочке эта машина Тьюринга применяет алгоритм, данный в гл.
Имеет место факт, что не существует машины Тьюринга, которая останавли-вается
Имеет место факт, что не существует машины Тьюринга, которая останавли-вается
§ 6.4. Модификации машин Тьюринга
Одна из причин, по
§ 6.4. Модификации машин Тьюринга
Одна из причин, по
6.4.1. Машина Тьюринга с бесконечной
лентой в обе стороны
Теорема
6.4.1. Машина Тьюринга с бесконечной
лентой в обе стороны
Теорема
6.4.2. Многоленточная машина Тьюринга состоит из конечного управления с k
6.4.2. Многоленточная машина Тьюринга состоит из конечного управления с k
При одном движении, зависящем от состояния конечного управления и сканируемого
При одном движении, зависящем от состояния конечного управления и сканируемого
Теорема 6.2. Если язык L принимается многоленточной машиной Тьюринга, то
Теорема 6.2. Если язык L принимается многоленточной машиной Тьюринга, то
6.4.3. Недетерминированная машина Тьюринга есть устройство с конечным управлением и одной
6.4.3. Недетерминированная машина Тьюринга есть устройство с конечным управлением и одной
Теорема 6.3. Если язык L принимается недетерминированной машиной Тьюринга T1,
Теорема 6.3. Если язык L принимается недетерминированной машиной Тьюринга T1,
Тогда любая последовательность вариан-тов движений конечной длины может быть представлена
Тогда любая последовательность вариан-тов движений конечной длины может быть представлена
Можно построить детерминированную машину Тьюринга T2, моделирующую машину T1. Снабдим
Можно построить детерминированную машину Тьюринга T2, моделирующую машину T1. Снабдим
Для каждой последовательности цифр, сгенерированной на ленте 2, машина T2
Для каждой последовательности цифр, сгенерированной на ленте 2, машина T2
Если машина T1 входит в принимающее состояние, то машина T2
Если машина T1 входит в принимающее состояние, то машина T2
 Реологические и технологические свойства бетонной смеси
Реологические и технологические свойства бетонной смеси Вишивка гладдю
Вишивка гладдю Проект электрической части ТЭЦ-400 МВт в г. Петрозаводск
Проект электрической части ТЭЦ-400 МВт в г. Петрозаводск Без названия
Без названия Проекции и виды
Проекции и виды неотложные состояния в акушерстве
неотложные состояния в акушерстве Dzieci uczą się tego, w czym i z czym żyją
Dzieci uczą się tego, w czym i z czym żyją Intel® 80333
Intel® 80333  Подготовили: Польчак Е.К. Левшанова Е.В.
Подготовили: Польчак Е.К. Левшанова Е.В.  Конституция Российской Федерации
Конституция Российской Федерации Морфологическая типология языков и морфологическая классификация языков
Морфологическая типология языков и морфологическая классификация языков Посвящается 374 летию со дня рождения Исаака Ньютона (1643-1727), английского математика, физика, астронома
Посвящается 374 летию со дня рождения Исаака Ньютона (1643-1727), английского математика, физика, астронома Презентация на тему "Помощь депрессивным детям" - скачать презентации по Педагогике
Презентация на тему "Помощь депрессивным детям" - скачать презентации по Педагогике 骑车旅行记
骑车旅行记 Современная философия качества
Современная философия качества  Молитва и любовь спасают
Молитва и любовь спасают Разработка рекомендаций по использованию солнечных батарей в условиях Республики Марий Эл
Разработка рекомендаций по использованию солнечных батарей в условиях Республики Марий Эл Степень с натуральным показателем - презентация по Алгебре__
Степень с натуральным показателем - презентация по Алгебре__ Оценка стабильности работы компьютера с использованием контрольных карт
Оценка стабильности работы компьютера с использованием контрольных карт Кому нужны «столетние»
Кому нужны «столетние» Территориальное разделение труда
Территориальное разделение труда КАЧЕСТВО ПЛАНОВО-КАРТОГРАФИЧЕСКОГО МАТЕРИАЛА
КАЧЕСТВО ПЛАНОВО-КАРТОГРАФИЧЕСКОГО МАТЕРИАЛА Регулируемый блок питания на транзисторах
Регулируемый блок питания на транзисторах Зачетная работа по риторике. Как интернет влияет на учебу и жизнь человека.
Зачетная работа по риторике. Как интернет влияет на учебу и жизнь человека. Логика. Софисты и Сократ
Логика. Софисты и Сократ  我的一天
我的一天 Электр ортадан тепкіш сораптық қондырғы
Электр ортадан тепкіш сораптық қондырғы Монополия в рыночной экономике
Монополия в рыночной экономике