- Наземная фотограмметрия

Содержание
- 2. Назначение и область применения методов наземной фотограмметрии Архитектура Строительство Горное дело Судостроение Медицина Криминалистика Машиностроение И
- 3. Архитектура и оценка ДТП
- 4. Автомобилестроение
- 5. Применение фотограмметрии в судостроении
- 6. Робототехника
- 7. Исследование дорожного покрытия
- 8. Археология
- 9. Медицина и биотехнология
- 10. Съемочные камеры, применяемые в наземной фотограмметрии
- 11. Классификация съемочных камер и систем применяемых в наземной фотограмметрии Фотокамеры Цифровые камеры Цифровые видеокамеры Фотокамеры с
- 12. Фотокамеры . UMK Carl Zeiss (Jena) Rolleimetric
- 13. Стереосистемы UMK с базисом 840 mm SMK с базисом120 mm
- 14. Цифровые камеры Rollei db45 metric Rollei d7 metric Rollei RSC
- 15. Hasselblad H1 c цифровым задником Phase One
- 16. Цифровые приставки Kodak ProBack Plus Kodak ProBack 645 сканерная приставка Super10 K-2 фирмы Better Light с
- 17. Цифровые видеокамеры с захватом изображения
- 18. Системы координат, применяемые в наземной фотограмметрии. Элементы ориентирования снимка.
- 19. Система координат снимка, элементы внутреннего ориентирования Элементы внутреннего ориентирования снимка : f- фокусное расстояние объектива x0,y0-
- 20. Системы координат объекта. Элементы внешнего ориентирования снимка Базисная система координат Xs,Ys,Zs – положение центра проекции в
- 21. Основные случаи съемки Общий случай съемки α = 0-3600 ω = 0-3600 κ = 0-3600
- 22. Нормальный случай съемки α1 ≈ α2 ≈ 0o ω1 ≈ ω2 ≈ 90o κ1 ≈ κ1
- 23. Равноотклоненный случай съемки. α1 ≈ α2 ≈ α ω1 ≈ ω2 ≈ 90o κ1 ≈ κ1
- 24. Равнонаклонный случай съемки α1 ≈ α2 ≈ 0o ω1 ≈ ω2 ≈ ω κ1 ≈ κ1
- 25. Конвергентный случай съемки γ
- 26. Проектирование наземной съемки Способы выполнения съемки для наземной фотограмметрии
- 27. Основные задачи при выборе схемы съемки Обеспечить заданную точность определения координат точек объекта при минимальном количестве
- 28. Выбор базиса фотографирования и отстояния от объекта формат снимка - 4500x3000 pix f = 4500 pix
- 29. Проектирование дополнительных базисов при наличии мертвых зон
- 30. Калибровка камер f- фокусное расстояние объектива x0,y0- координаты главной точки dx,dy-дисторсия объектива Координаты координатных меток Калибровка
- 31. Калибровка с помощью тест-объекта где дисторсия описана выражением Уравнения коллинеарности с дополнительными параметрами
- 32. Примеры тест-объектов Пространственный тест-объект Плоский тест-объект
- 33. Трехмерное лазерное сканирование Формулы вычисления координат объекта
- 34. Сканеры для наземного сканирования
- 35. Технические характеристики сканеров
- 36. Примеры лазерного сканирования
- 38. Скачать презентацию
Назначение и область применения методов наземной фотограмметрии
Архитектура
Строительство
Горное дело
Судостроение
Медицина
Криминалистика
Машиностроение
И т.д.
Назначение и область применения методов наземной фотограмметрии
Архитектура
Строительство
Горное дело
Судостроение
Медицина
Криминалистика
Машиностроение
И т.д.
Архитектура и оценка ДТП
Архитектура и оценка ДТП

Автомобилестроение
Автомобилестроение

Применение фотограмметрии в судостроении
Применение фотограмметрии в судостроении
Робототехника
Робототехника
Исследование дорожного покрытия
Исследование дорожного покрытия

Археология
Археология
Медицина и биотехнология
Медицина и биотехнология
Съемочные камеры, применяемые в наземной фотограмметрии
Съемочные камеры, применяемые в наземной фотограмметрии
Классификация съемочных камер и систем применяемых в наземной фотограмметрии
Фотокамеры
Цифровые камеры
Цифровые видеокамеры
Классификация съемочных камер и систем применяемых в наземной фотограмметрии
Фотокамеры
Цифровые камеры
Цифровые видеокамеры

Фотокамеры
.
UMK Carl Zeiss (Jena)
Rolleimetric
Фотокамеры
.
UMK Carl Zeiss (Jena)
Rolleimetric

Стереосистемы
UMK с базисом 840 mm
SMK с базисом120 mm
Стереосистемы
UMK с базисом 840 mm
SMK с базисом120 mm

Цифровые камеры
Rollei db45 metric
Rollei d7 metric
Rollei RSC
Цифровые камеры
Rollei db45 metric
Rollei d7 metric
Rollei RSC

Hasselblad H1 c цифровым задником Phase One
Hasselblad H1 c цифровым задником Phase One

Цифровые приставки
Kodak ProBack Plus
Kodak ProBack 645
сканерная приставка Super10 K-2 фирмы
Цифровые приставки
Kodak ProBack Plus
Kodak ProBack 645
сканерная приставка Super10 K-2 фирмы

Цифровые видеокамеры с захватом изображения
Цифровые видеокамеры с захватом изображения
Системы координат, применяемые в наземной фотограмметрии.
Элементы ориентирования снимка.
Системы координат, применяемые в наземной фотограмметрии.
Элементы ориентирования снимка.
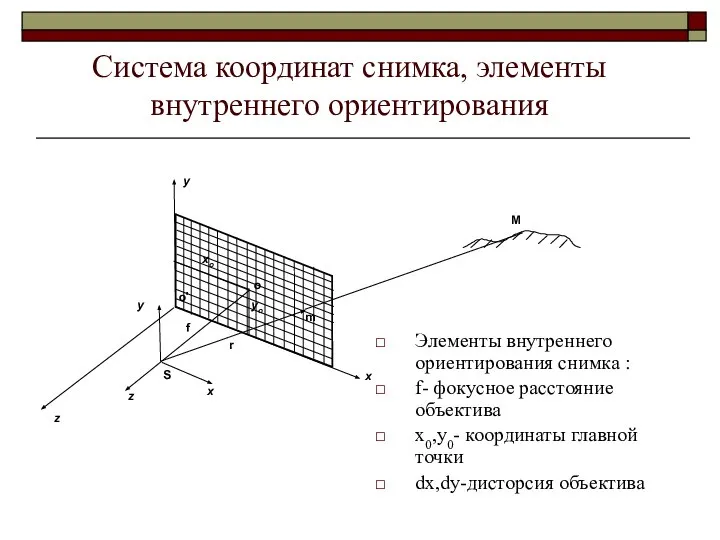
Система координат снимка, элементы внутреннего ориентирования
Элементы внутреннего ориентирования снимка :
f- фокусное
Система координат снимка, элементы внутреннего ориентирования
Элементы внутреннего ориентирования снимка :
f- фокусное
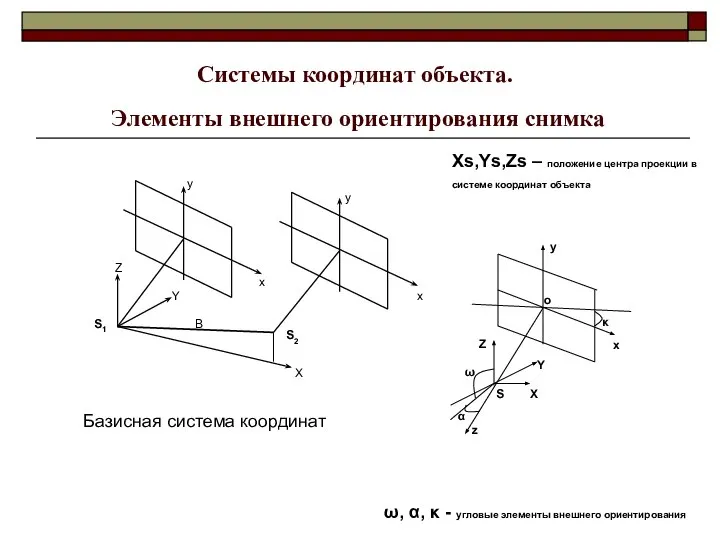
Системы координат объекта.
Элементы внешнего ориентирования снимка
Базисная система координат
Xs,Ys,Zs
Системы координат объекта.
Элементы внешнего ориентирования снимка
Базисная система координат
Xs,Ys,Zs
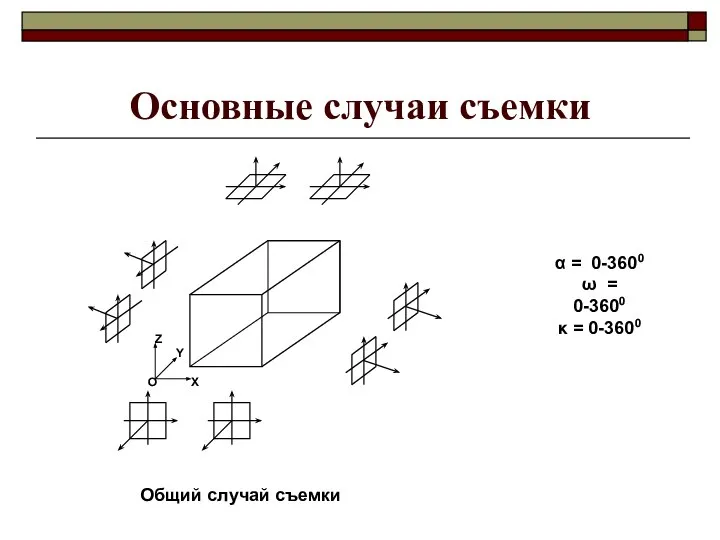
Основные случаи съемки
Общий случай съемки
α = 0-3600
ω = 0-3600
κ =
Основные случаи съемки
Общий случай съемки
α = 0-3600
ω = 0-3600
κ =
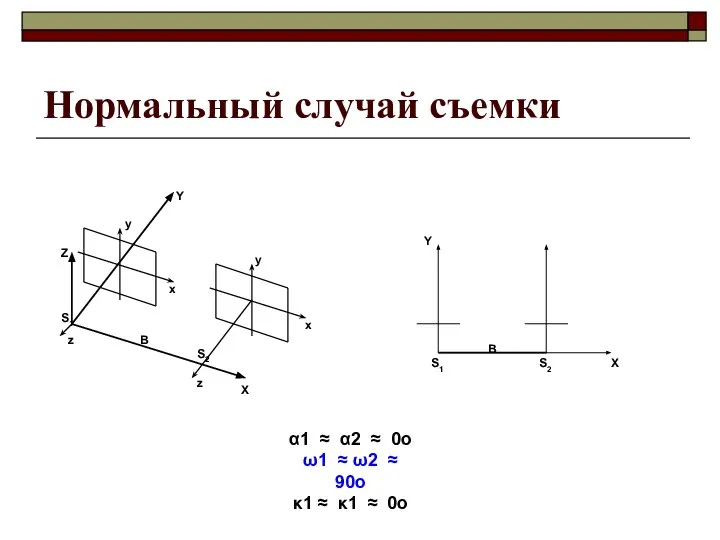
Нормальный случай съемки
α1 ≈ α2 ≈ 0o
ω1 ≈ ω2 ≈
Нормальный случай съемки
α1 ≈ α2 ≈ 0o
ω1 ≈ ω2 ≈
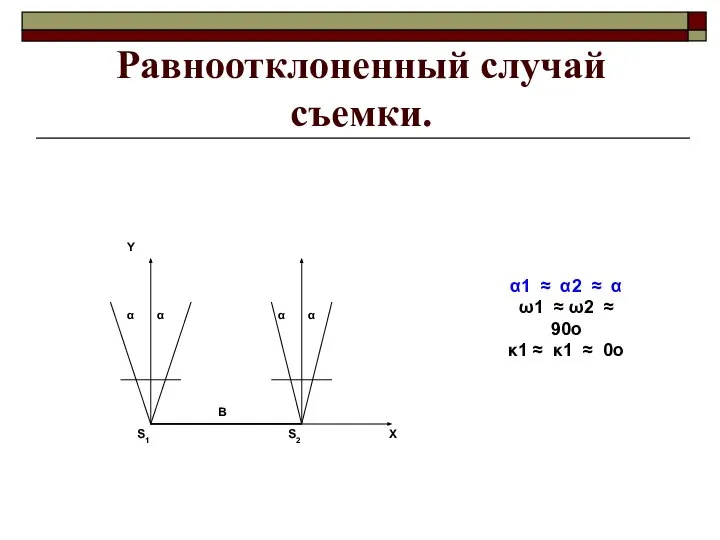
Равноотклоненный случай съемки.
α1 ≈ α2 ≈ α
ω1 ≈ ω2 ≈
Равноотклоненный случай съемки.
α1 ≈ α2 ≈ α
ω1 ≈ ω2 ≈
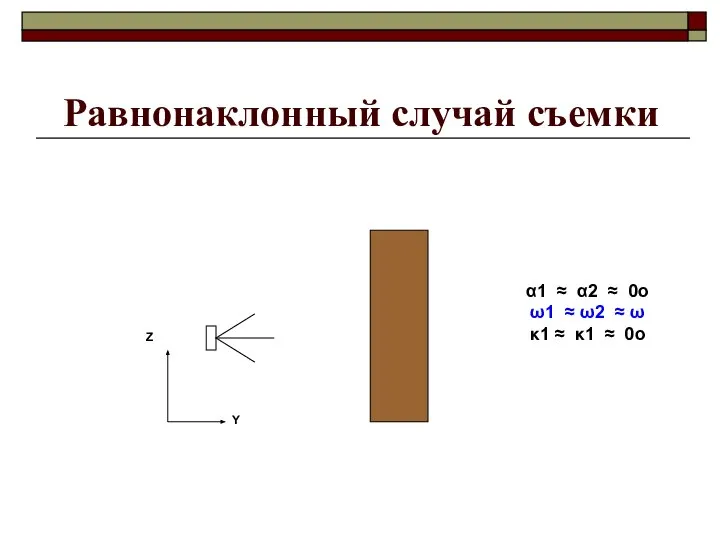
Равнонаклонный случай съемки
α1 ≈ α2 ≈ 0o
ω1 ≈ ω2 ≈
Равнонаклонный случай съемки
α1 ≈ α2 ≈ 0o
ω1 ≈ ω2 ≈
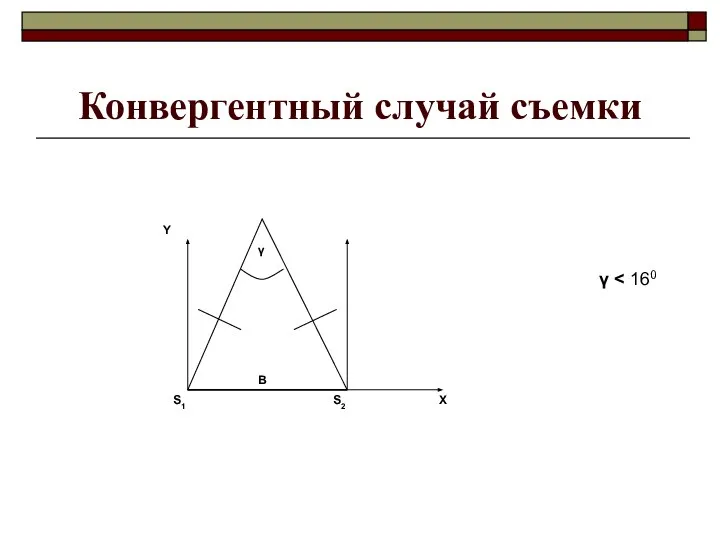
Конвергентный случай съемки
γ < 160
Конвергентный случай съемки
γ < 160
Проектирование наземной съемки
Способы выполнения съемки для наземной фотограмметрии
Проектирование наземной съемки
Способы выполнения съемки для наземной фотограмметрии
Основные задачи при выборе схемы съемки
Обеспечить заданную точность определения координат
Основные задачи при выборе схемы съемки
Обеспечить заданную точность определения координат
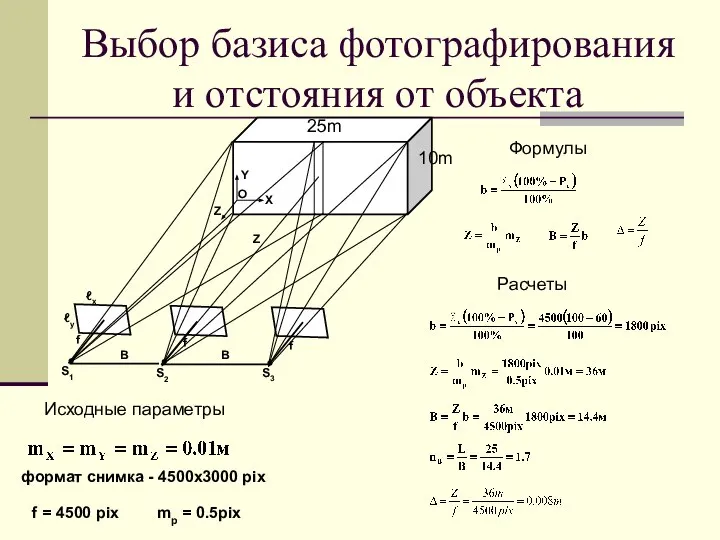
Выбор базиса фотографирования и отстояния от объекта
формат снимка - 4500x3000 pix
Выбор базиса фотографирования и отстояния от объекта
формат снимка - 4500x3000 pix
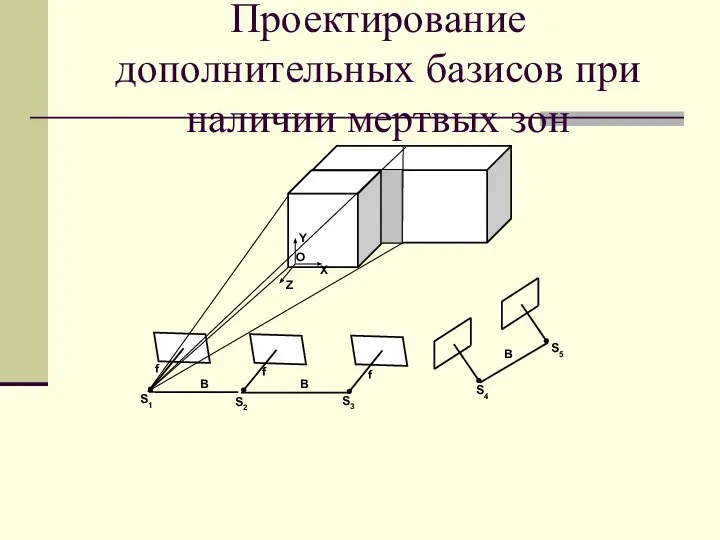
Проектирование дополнительных базисов при наличии мертвых зон
Проектирование дополнительных базисов при наличии мертвых зон
Калибровка камер
f- фокусное расстояние объектива
x0,y0- координаты главной точки
dx,dy-дисторсия объектива
Координаты координатных
Калибровка камер
f- фокусное расстояние объектива
x0,y0- координаты главной точки
dx,dy-дисторсия объектива
Координаты координатных
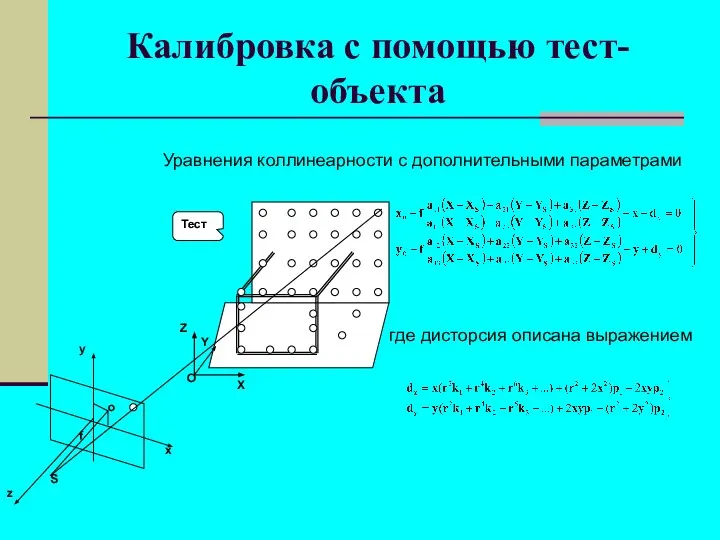
Калибровка с помощью тест-объекта
где дисторсия описана выражением
Уравнения коллинеарности с дополнительными
Калибровка с помощью тест-объекта
где дисторсия описана выражением
Уравнения коллинеарности с дополнительными
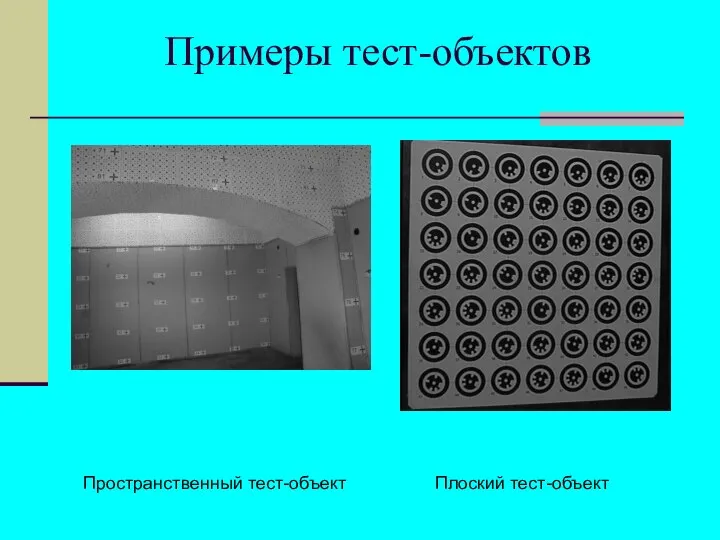
Примеры тест-объектов
Пространственный тест-объект
Плоский тест-объект
Примеры тест-объектов
Пространственный тест-объект
Плоский тест-объект

Трехмерное лазерное сканирование
Формулы вычисления координат объекта
Трехмерное лазерное сканирование
Формулы вычисления координат объекта

Сканеры для наземного сканирования
Сканеры для наземного сканирования

Технические характеристики сканеров
Технические характеристики сканеров

Примеры лазерного сканирования
Примеры лазерного сканирования
 Биохимические маркеры перенапряжения и перетренированности
Биохимические маркеры перенапряжения и перетренированности РАЗНОВИДНОСТИ РЕКЛАМЫ И СТРАТЕГИИ ЕЕ ПРИМЕНЕНИЯ
РАЗНОВИДНОСТИ РЕКЛАМЫ И СТРАТЕГИИ ЕЕ ПРИМЕНЕНИЯ  Аналитическая биохимия / 2012 Лекция 1 Суть и принципы аналитической биохимии Валерий Зайцев, к.б.н. ВолгГМУ, кафедра биохимии Распрос
Аналитическая биохимия / 2012 Лекция 1 Суть и принципы аналитической биохимии Валерий Зайцев, к.б.н. ВолгГМУ, кафедра биохимии Распрос Операциялық күшейткіштер
Операциялық күшейткіштер Психологические составляющие профессионального самоопределения личности
Психологические составляющие профессионального самоопределения личности Телевидение табиғаты
Телевидение табиғаты Ученица 6В класса МКОУ ШР «СОШ №5» Попова Вера Преподаватель Пяткова Е. В.
Ученица 6В класса МКОУ ШР «СОШ №5» Попова Вера Преподаватель Пяткова Е. В. Презентация на тему "Коммуникативные барьеры в обучении" - скачать презентации по Педагогике
Презентация на тему "Коммуникативные барьеры в обучении" - скачать презентации по Педагогике Теория дискурса и теория текста в лингвистике
Теория дискурса и теория текста в лингвистике Разметка Android-приложения. Объектно - ориентированное программирование
Разметка Android-приложения. Объектно - ориентированное программирование Использование обучающих сайтов учащимися на уроках английского языка в начальных классах
Использование обучающих сайтов учащимися на уроках английского языка в начальных классах Модели параллельного программирования
Модели параллельного программирования Экономико-демографическая характеристика Японии
Экономико-демографическая характеристика Японии Презентация "Порядок подготовки аудиторского заключения" - скачать презентации по Экономике
Презентация "Порядок подготовки аудиторского заключения" - скачать презентации по Экономике Классификации и диагностика заболеваний пародонта
Классификации и диагностика заболеваний пародонта Второй и третий признаки подобия треугольников 8 класс
Второй и третий признаки подобия треугольников 8 класс особенности переговоров
особенности переговоров Переработка отходов бурения, образующихся при бурении скважин на шельфе Баренцева моря
Переработка отходов бурения, образующихся при бурении скважин на шельфе Баренцева моря Классы вычетов - презентация по Алгебре
Классы вычетов - презентация по Алгебре Судебное правотворчество
Судебное правотворчество Банки
Банки  Крупнейшие в мире АВАРИИ НА АЭС
Крупнейшие в мире АВАРИИ НА АЭС Поняття та історія розвитку технології програмування на основі Microsoft Solutions Framework. (Лекція 1)
Поняття та історія розвитку технології програмування на основі Microsoft Solutions Framework. (Лекція 1) 2014UML03.ppt
2014UML03.ppt Формирование приверженности персонала крупной компании
Формирование приверженности персонала крупной компании Комплекс специальной спутниковой связи «Стрела-3»
Комплекс специальной спутниковой связи «Стрела-3» Екатеринбургский механический техникум
Екатеринбургский механический техникум Моря и океаны
Моря и океаны