Однофазный однополупериодный выпрямитель. Однополупериодный инвертор. Преобразователи частоты в электроприводе
- Однофазный однополупериодный выпрямитель. Однополупериодный инвертор. Преобразователи частоты в электроприводе

Содержание
- 2. вертикально-фазовое управления Принцип работы данной СУ основан на формировании управляющих импульсов, следующих синхронно с сетевым напряжением
- 3. Однофазный двухполупериодный выпрямитель со средней точкой Ld = 0 α=0
- 4. Однофазный двухполупериодный выпрямитель со средней точкой Ld=0 α > 0 (см. модель)
- 5. Однофазный мостовой выпрямитель
- 6. Трехфазный мостовой выпрямитель (см. модель)
- 7. Трехфазный двухмостовой выпрямитель с последовательным соединением мостов
- 8. Однополупериодный инвертор
- 9. Автономные инверторы
- 10. Инверторы тока и напряжения
- 11. Параллельный инвертор тока
- 12. Последовательный инвертор тока
- 13. Способы улучшения выходного напряжения инверторов и преобразователей частоты
- 14. Ряд Фурье Любая периодическая функция f(t) с периодом T может быть представлена в виде суммы синусов
- 15. Влияние несинусоидальности напряжения на потребителей
- 16. ПОСЛЕДОВАТЕЛЬНО ПАРАЛЛЕЛЬНЫЕ РЕЗОНАНСНЫЕ ЗВЕНЬЯ
- 19. Суммирование напряжений одинаковых частот
- 20. Суммирование напряжений разных частот
- 21. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ В ЭЛЕКТРОПРИВОДЕ Классификация преобразователей частоты для регулируемого электропривода переменного тока
- 22. Режимы работы насоса Регулирование параметров насоса дросселированием В настоящее время самым распространенным способом поддержания необходимого давления
- 23. Оценка потребляемой мощности при регулировании частоты вращения В соответствии с формулами приведения центробежных насосов и вентиляторов
- 24. Изменение КПД насосного агрегата Способ регулирования давления в сети путём изменения частоты вращения привода насосного агрегата
- 25. Частотно регулируемый электропривод Возможность управления частотой вращения короткозамкнутых асинхронных электродвигателей была доказана сразу же после их
- 26. Скалярное частотное управление При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю
- 27. Преобразователи с непосредственной связью Исторически первыми появились преобразователи с непосредственной связью, в которых силовая часть представляет
- 28. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
- 29. Преобразователи с явно выраженным звеном постоянного тока на тиристорах Наиболее широкое применение в современных частотно регулируемых
- 30. Изменение частоты и амплитуды В инверторе осуществляется преобразование постоянного напряжения ud в трехфазное (или однофазное) импульсное
- 31. Структура преобразователя частоты Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих
- 32. Двухтрансформаторная схема высоковольтного преобразователя частоты В схеме преобразователя осуществляется двойная трансформация напряжения с помощью понижающего (Т1)
- 33. Преобразователь частоты высоковольтный многоуровневый «Электротекс» Для получения высокого коэффициента мощности преобразователя входной трансформатор выполнен по схеме
- 34. Распределение напряжений преобразователя частоты высоковольтного многоуровневого Электротекс Сравнительно низкое напряжение элементарной ячейки преобразователя в комплексе с
- 35. Основные технические данные и характеристики EK-AV6-1,2-AF-I6-УХЛ4
- 36. Свойства EK-AV6-XX-ХF-IX При использовании преобразователей частоты EK-AV6-XX-ХF-IX: - отсутствуют значительные гармонические помехи в питающей сети; -
- 37. Структурная схема системы управления ПЧ
- 39. Скачать презентацию
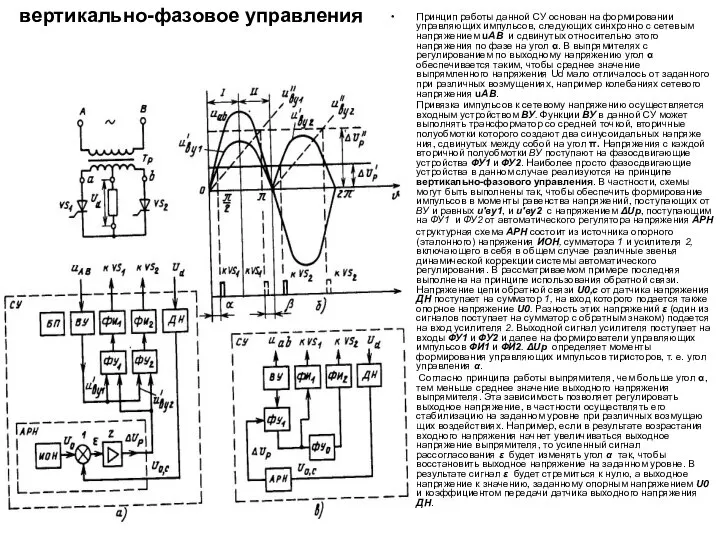
вертикально-фазовое управления
Принцип работы данной СУ основан на формировании управляющих импульсов, следующих
вертикально-фазовое управления
Принцип работы данной СУ основан на формировании управляющих импульсов, следующих
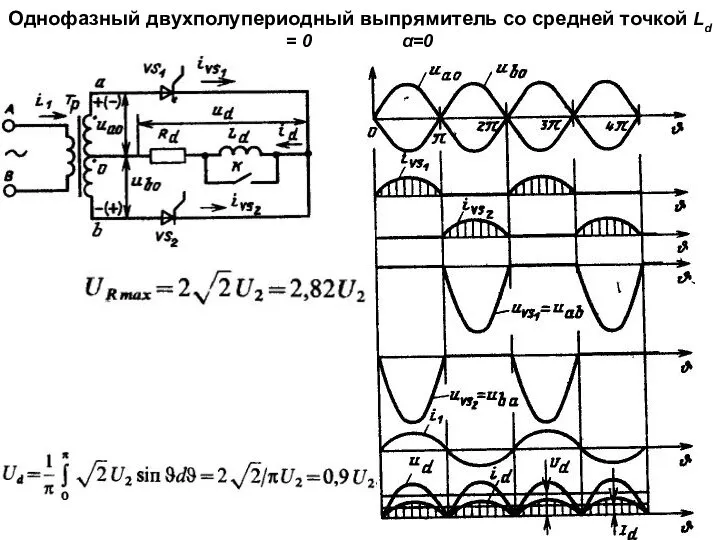
Однофазный двухполупериодный выпрямитель со средней точкой Ld = 0 α=0
Однофазный двухполупериодный выпрямитель со средней точкой Ld = 0 α=0
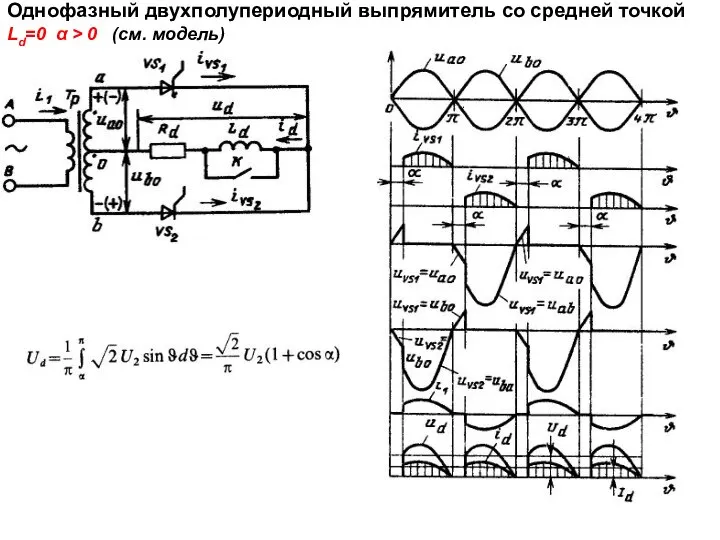
Однофазный двухполупериодный выпрямитель со средней точкой Ld=0 α > 0 (см.
Однофазный двухполупериодный выпрямитель со средней точкой Ld=0 α > 0 (см.

Однофазный мостовой выпрямитель
Однофазный мостовой выпрямитель

Трехфазный мостовой выпрямитель (см. модель)
Трехфазный мостовой выпрямитель (см. модель)
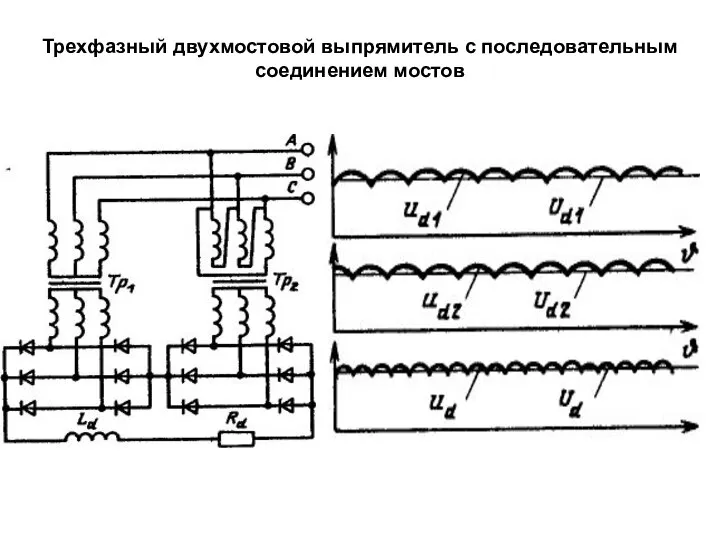
Трехфазный двухмостовой выпрямитель с последовательным соединением мостов
Трехфазный двухмостовой выпрямитель с последовательным соединением мостов
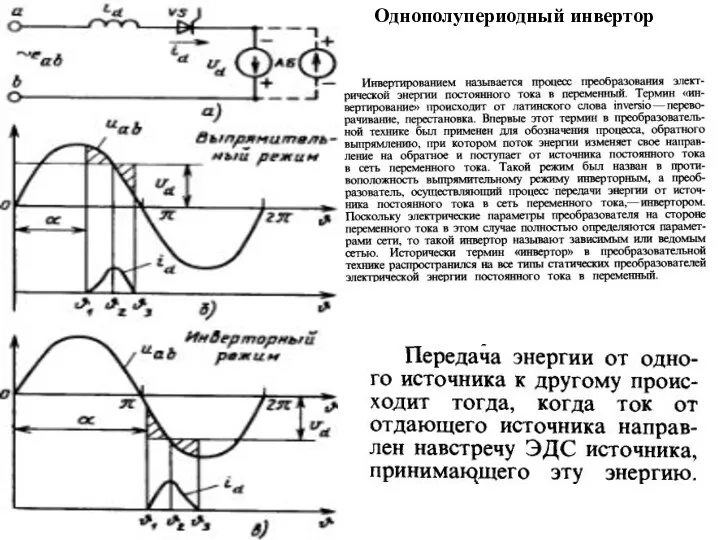
Однополупериодный инвертор
Однополупериодный инвертор
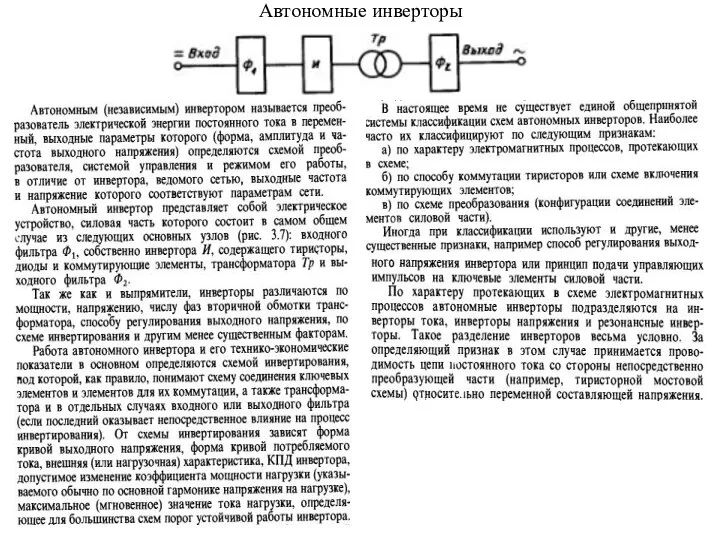
Автономные инверторы
Автономные инверторы

Инверторы
тока и напряжения
Инверторы
тока и напряжения
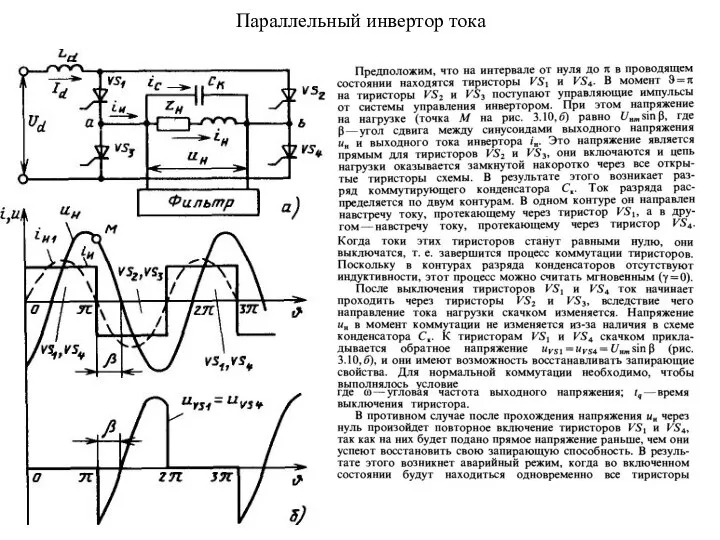
Параллельный инвертор тока
Параллельный инвертор тока
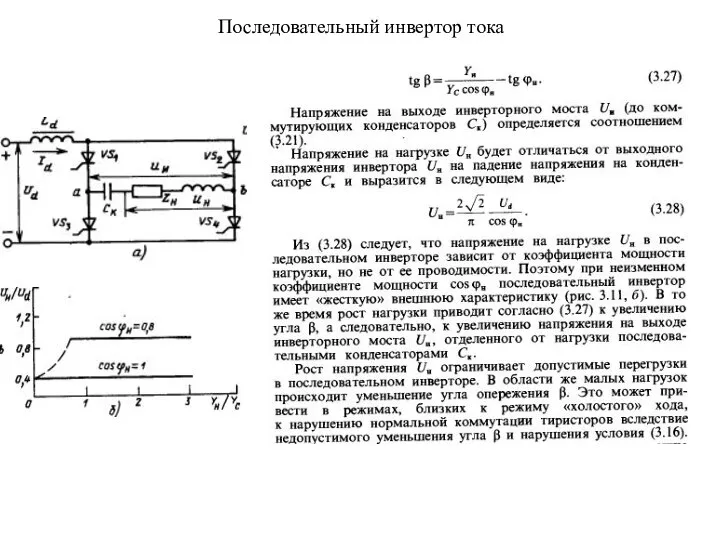
Последовательный инвертор тока
Последовательный инвертор тока
Способы улучшения выходного напряжения инверторов и преобразователей частоты
Способы улучшения выходного напряжения инверторов и преобразователей частоты
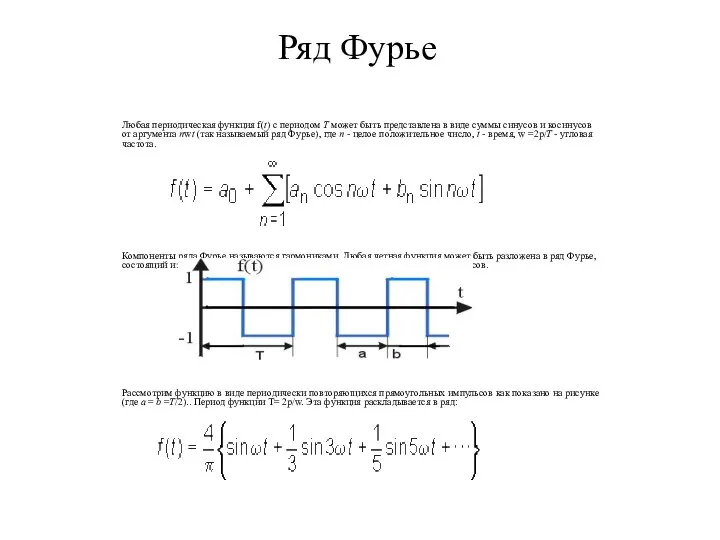
Ряд Фурье
Любая периодическая функция f(t) с периодом T может быть представлена
Ряд Фурье
Любая периодическая функция f(t) с периодом T может быть представлена
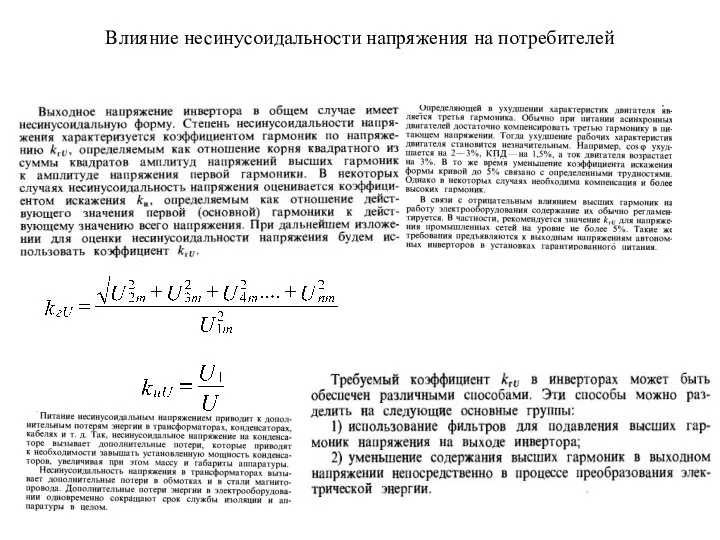
Влияние несинусоидальности напряжения на потребителей
Влияние несинусоидальности напряжения на потребителей
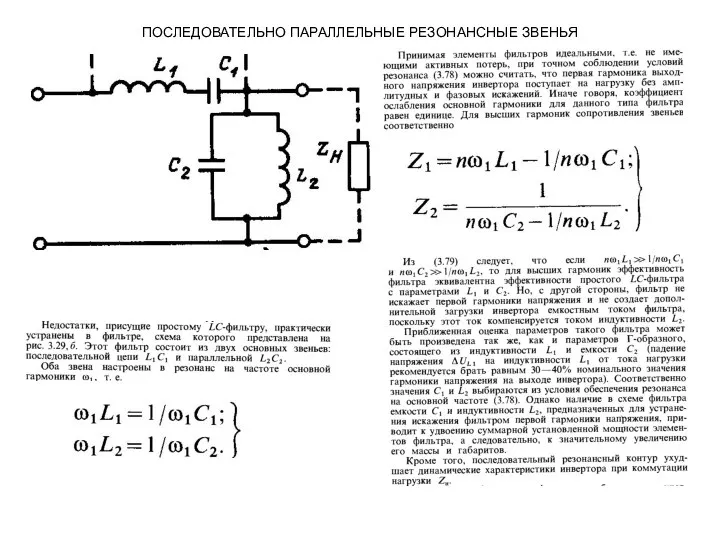
ПОСЛЕДОВАТЕЛЬНО ПАРАЛЛЕЛЬНЫЕ РЕЗОНАНСНЫЕ ЗВЕНЬЯ
ПОСЛЕДОВАТЕЛЬНО ПАРАЛЛЕЛЬНЫЕ РЕЗОНАНСНЫЕ ЗВЕНЬЯ


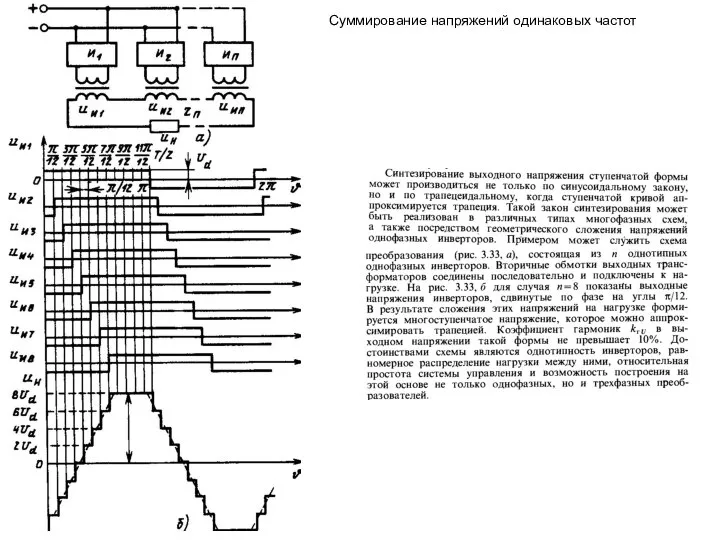
Суммирование напряжений одинаковых частот
Суммирование напряжений одинаковых частот
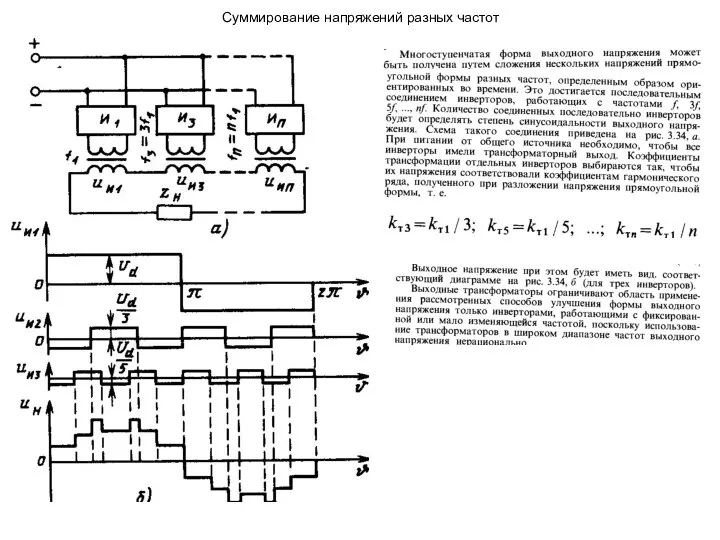
Суммирование напряжений разных частот
Суммирование напряжений разных частот

ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ В ЭЛЕКТРОПРИВОДЕ
Классификация преобразователей частоты для регулируемого электропривода переменного тока
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ В ЭЛЕКТРОПРИВОДЕ
Классификация преобразователей частоты для регулируемого электропривода переменного тока
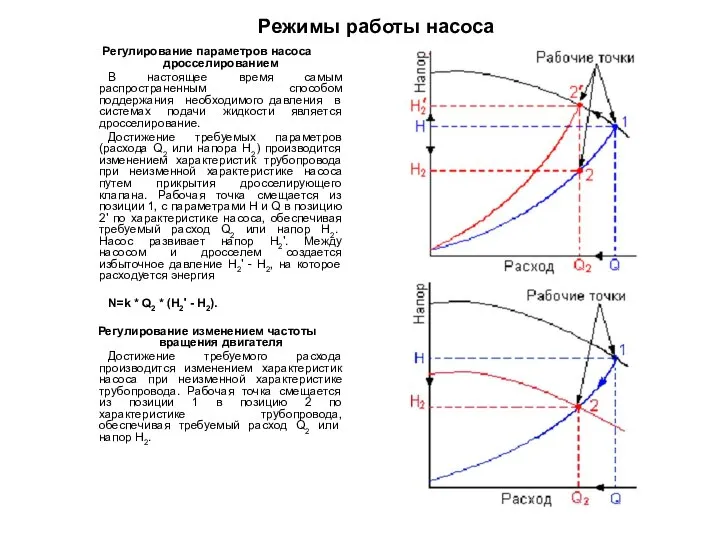
Режимы работы насоса
Регулирование параметров насоса дросселированием
В настоящее время самым распространенным
Режимы работы насоса
Регулирование параметров насоса дросселированием
В настоящее время самым распространенным
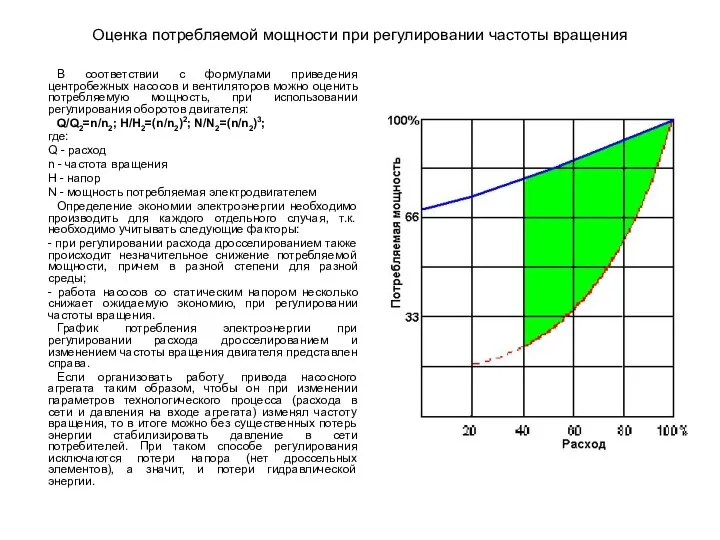
Оценка потребляемой мощности при регулировании частоты вращения
В соответствии с формулами приведения
Оценка потребляемой мощности при регулировании частоты вращения
В соответствии с формулами приведения
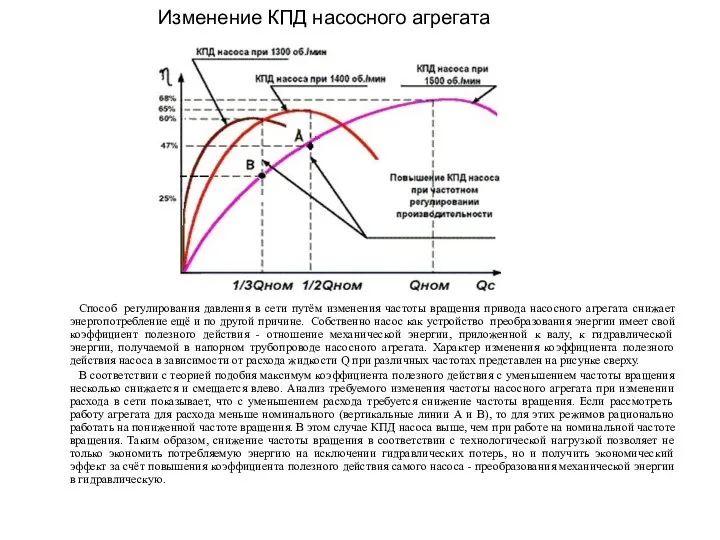
Изменение КПД насосного агрегата
Способ регулирования давления в сети путём изменения
Изменение КПД насосного агрегата
Способ регулирования давления в сети путём изменения
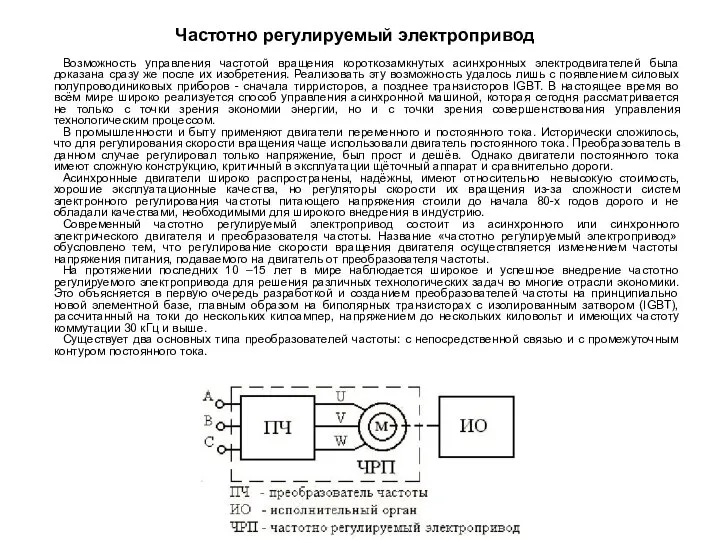
Частотно регулируемый электропривод
Возможность управления частотой вращения короткозамкнутых асинхронных электродвигателей была доказана
Частотно регулируемый электропривод
Возможность управления частотой вращения короткозамкнутых асинхронных электродвигателей была доказана

Скалярное частотное управление
При скалярном управлении по определенному закону изменяют амплитуду
Скалярное частотное управление
При скалярном управлении по определенному закону изменяют амплитуду
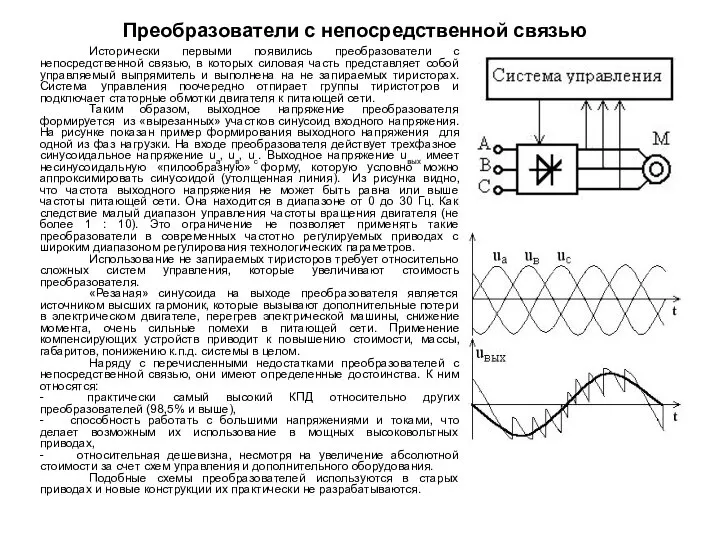
Преобразователи с непосредственной связью
Исторически первыми появились преобразователи с непосредственной связью,
Преобразователи с непосредственной связью
Исторически первыми появились преобразователи с непосредственной связью,

ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ

Преобразователи с явно выраженным звеном постоянного тока на тиристорах
Наиболее широкое применение
Преобразователи с явно выраженным звеном постоянного тока на тиристорах
Наиболее широкое применение
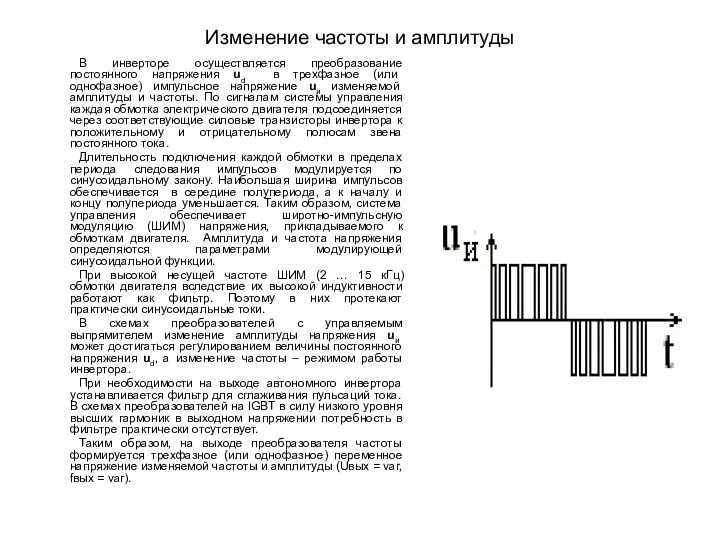
Изменение частоты и амплитуды
В инверторе осуществляется преобразование постоянного напряжения ud в
Изменение частоты и амплитуды
В инверторе осуществляется преобразование постоянного напряжения ud в

Структура преобразователя частоты
Большинство современных преобразователей частоты построено по схеме двойного
Структура преобразователя частоты
Большинство современных преобразователей частоты построено по схеме двойного

Двухтрансформаторная схема высоковольтного преобразователя частоты
В схеме преобразователя осуществляется двойная трансформация
Двухтрансформаторная схема высоковольтного преобразователя частоты
В схеме преобразователя осуществляется двойная трансформация

Преобразователь частоты высоковольтный многоуровневый «Электротекс»
Для получения высокого коэффициента мощности преобразователя входной
Преобразователь частоты высоковольтный многоуровневый «Электротекс»
Для получения высокого коэффициента мощности преобразователя входной
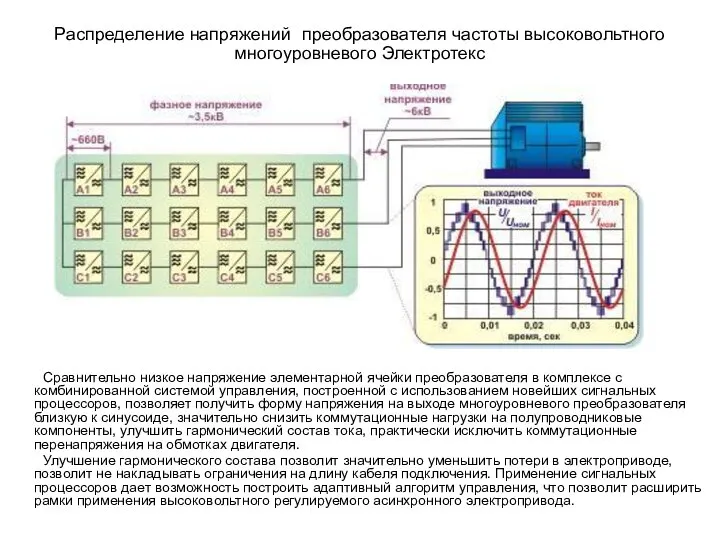
Распределение напряжений преобразователя частоты высоковольтного многоуровневого Электротекс
Сравнительно низкое напряжение элементарной
Распределение напряжений преобразователя частоты высоковольтного многоуровневого Электротекс
Сравнительно низкое напряжение элементарной

Основные технические данные и характеристики EK-AV6-1,2-AF-I6-УХЛ4
Основные технические данные и характеристики EK-AV6-1,2-AF-I6-УХЛ4
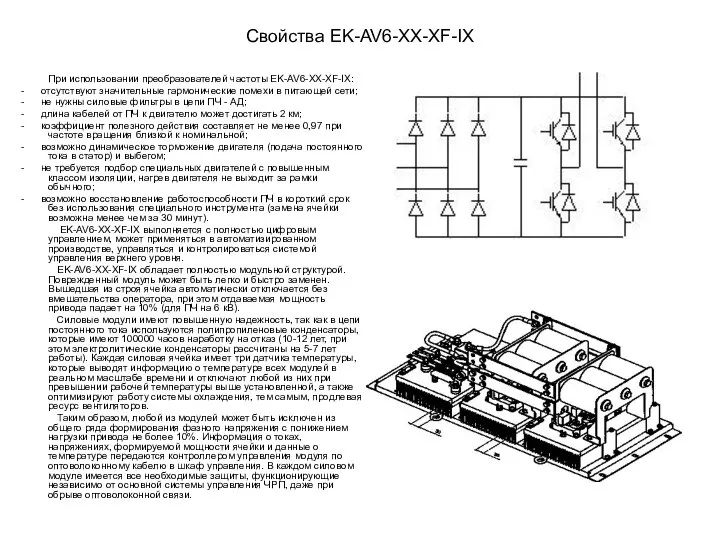
Свойства EK-AV6-XX-ХF-IX
При использовании преобразователей частоты EK-AV6-XX-ХF-IX:
- отсутствуют значительные гармонические помехи в
Свойства EK-AV6-XX-ХF-IX
При использовании преобразователей частоты EK-AV6-XX-ХF-IX:
- отсутствуют значительные гармонические помехи в

Структурная схема системы управления ПЧ
Структурная схема системы управления ПЧ
 Модульное программирование. (Лекция 15)
Модульное программирование. (Лекция 15) Новосибирский государственный краеведческий музей
Новосибирский государственный краеведческий музей Презентация "Кристоф Виллибальд Глюк" - скачать презентации по МХК
Презентация "Кристоф Виллибальд Глюк" - скачать презентации по МХК 432506
432506 Презентация на тему "Педагогическое общение" - скачать презентации по Педагогике
Презентация на тему "Педагогическое общение" - скачать презентации по Педагогике Mein Lieblingssänger heißt Mot
Mein Lieblingssänger heißt Mot Известные вирусы гепатита человека
Известные вирусы гепатита человека Алгоритмы обработки массивов
Алгоритмы обработки массивов Не демократические республики
Не демократические республики Сервистік қызмет көрсету логистикасы
Сервистік қызмет көрсету логистикасы Влияние стимуляторов роста на развитие и рост растений
Влияние стимуляторов роста на развитие и рост растений Оптимизация запросов
Оптимизация запросов Введение в проектирование по предметной области (DDD)
Введение в проектирование по предметной области (DDD) Синдром дыхательной недостаточности
Синдром дыхательной недостаточности Вір, душе, надійся
Вір, душе, надійся Отчёт-презентация. Прохождение практики ОАО «НПО «Квант»
Отчёт-презентация. Прохождение практики ОАО «НПО «Квант» Презентация Таможенная статистика и анализ
Презентация Таможенная статистика и анализ Платы и модули Arduino
Платы и модули Arduino Художественная культура Китая
Художественная культура Китая IBM电子商务解决 方案设计
IBM电子商务解决 方案设计 Презентация____
Презентация____ Основи програмування та алгоритмічні мови
Основи програмування та алгоритмічні мови Синтоизм - традиционная религия в Японии
Синтоизм - традиционная религия в Японии Спортивні ігри
Спортивні ігри Викторина. Пасха
Викторина. Пасха Развитие силовых способностей у школьников 10-11 классов во внеурочное время
Развитие силовых способностей у школьников 10-11 классов во внеурочное время Ионный обмен
Ионный обмен .9
.9