- Организация системы ввода вывода

Содержание
- 2. Задачи системы вводы вывода
- 3. Глобальные задачи СВВ Обеспечение максимальной производительности вычислительной системы. Возможность изменения конфигурации периферийных устройств (ПУ). Возможность модифицировать
- 4. Элементы системы ввода -вывода Каналы Порты Интерфейсы Контроллеры Драйверы Способы обмена Программный Прямой доступ К памяти
- 5. Типы ввода – вывода процессора Изолированный ввод-вывод. Используются специальные команды МП: ввод, вывод, чтение состояния. Передача
- 6. Уровни обслуживания ввода-вывода Программа Блок управления Системная таблица Буфер данных Драйвер1 Драйвер N Контроллер 1 Контроллер
- 7. Функции драйверов Проверка готовности контроллера и ПУ к обмену; Формирование управляющих сигналов и данных для ПУ;
- 8. Способы организации СВВ Программный. На основе системы прерываний. Прямой доступ к памяти. Коммутаторный. Без адресный «точка
- 9. Алгоритм программного ввода-вывода под управлением процессора 1. Сформировать начальный адрес области обмена ОЗУ. 2. Занести длину
- 10. Система прерываний Обработка прерывания. Организация системы приоритетов через систему арбитража.
- 11. Диаграмма прерывания
- 12. Процедура обработки прерывания Идентификация уровня запроса прерывания и источника. Предоставление разрешения на прерывание ( или запрет).
- 13. Характеристики систем прерывания Время реакции Тр. Время на переключение программ Тп=Тз+Тв. Эффективность прерывания. Глубина прерываний.
- 14. Глубина прерывания
- 15. СВВ с использованием системы прерываний Прерывания Аппаратные Программные Немаскируемые Маскируемые Отказы Ловушки Аварии МП МП различает
- 16. Способы разрешения конфликтов на магистральной шине Арбитраж Система обработки прерываний Система приоритетов
- 17. Арбитраж шины Последовательный Последовательный многоуровневый Арбитр УВВ 1 УВВ 2 УВВ 3 УВВ 4 Запрос шины
- 18. Децентрализованный Арбитраж шины in out in in in out out out Линия арбитра +5 в УВВ
- 19. Прерывание Процесс переключения ЦП с одной программы на другую по внешнему сигналу с сохранением информации необходимой
- 20. Фрагмент контроллера с разрядом разрешение прерывания в регистре состояния и управления
- 21. Вектор прерываний
- 22. Контроллер прерываний Intel 8259A RGI – регистр запросов на прерывание. PRB – схема арбитр. ISR -
- 23. Связи контроллера прерываний ЦП 8086 Контроллер шины 8288 RD WR A0 EOI INTR INTA# Контроллер Прерываний
- 24. Обработка прерываний с программным опросом готовности Используется одна программа В-В
- 25. Обобщенная схема контроллера
- 26. Параллельный контроллер вывода Синхронный – приемник и передатчик работают от одного тактового генератора. Асинхронный – приемник
- 27. Синхронный и асинхронный Параллельный контроллер ввода
- 28. Контроллер последовательного вывода Синхронный
- 29. Синхронный Контроллер последовательного ввода
- 30. Контроллер асинхронного последовательного вывода
- 31. Контроллер асинхронного последовательного ввода
- 32. Контроллер ПДП может быть реализован как отдельное устройство, либо встраиваться в контроллеры ВУ. Режимы работы ПДП:
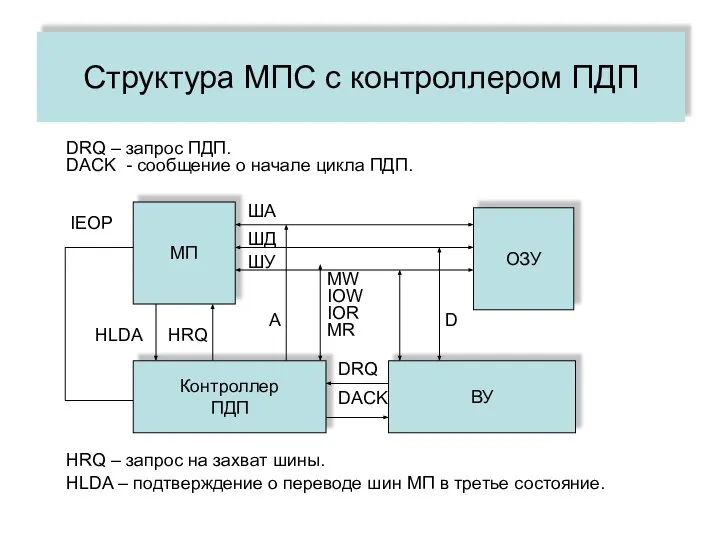
- 33. Структура МПС с контроллером ПДП МП ОЗУ Контроллер ПДП ВУ ША ШД ШУ HRQ HRQ –
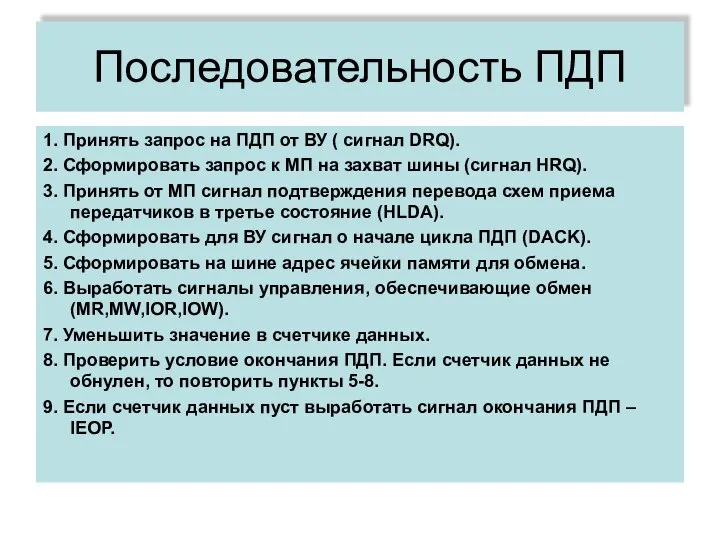
- 34. Последовательность ПДП 1. Принять запрос на ПДП от ВУ ( сигнал DRQ). 2. Сформировать запрос к
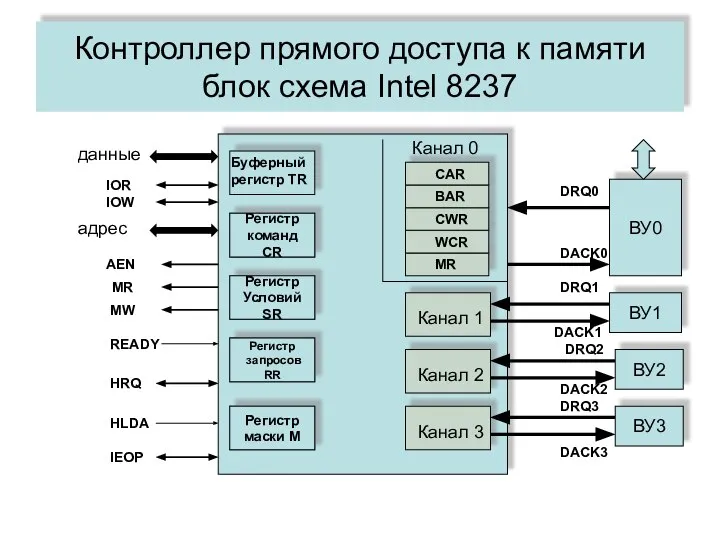
- 35. Контроллер прямого доступа к памяти блок схема Intel 8237 CAR BAR CWR WCR MR Канал 0
- 36. Назначение блоков контроллера ПДП MR – регистр режима определяет параметры передачи: - порядок изменения адреса (+
- 37. Фрагмент контроллера прямого доступа к памяти
- 38. PIO- parallel Input-Output Микросхема Intel 8255A 8255A Порт А 8 разрядов Порт В 8 разрядов Порт
- 39. Программная модель UART(Universal Asynchronous Receiver Transmitter) МП AVR фирмы ATMEL Регистр данных передатчика UDR 10 (11)
- 40. Программная модель UART микропроцессоров AVR фирмы ATMEL Регистр данных приемника UDR 10(11) – битный регистр сдвига
- 42. Организация программ для передачи данных UART AVR Программа MovsBuf Программа обработки прерываний Transint UDR Организация обмена
- 43. Организация кольцевого буфера на передачу в UART Указатель хвоста очереди Указатель головы очереди Начало буфера Голова
- 44. Организация программ для приема данных UART AVR Подпрограмма управления вводом Буфер UART IN Подпрограмма управления записью
- 46. Скачать презентацию
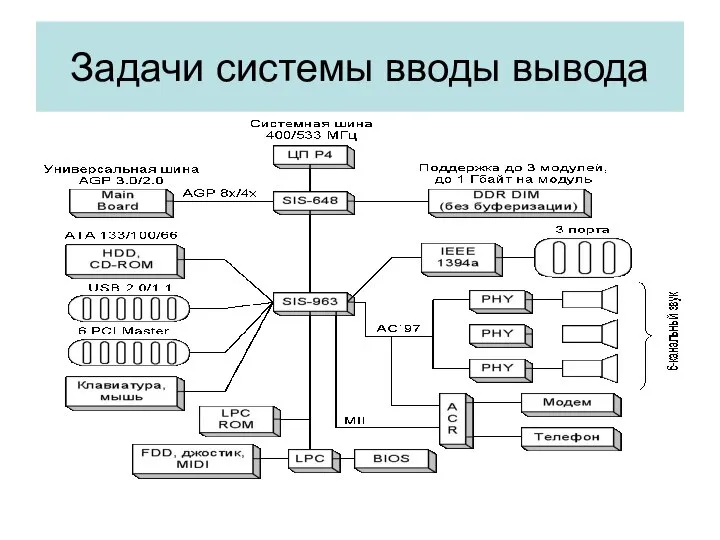
Задачи системы вводы вывода
Задачи системы вводы вывода
Глобальные задачи СВВ
Обеспечение максимальной производительности вычислительной системы.
Возможность изменения конфигурации периферийных устройств
Глобальные задачи СВВ
Обеспечение максимальной производительности вычислительной системы.
Возможность изменения конфигурации периферийных устройств
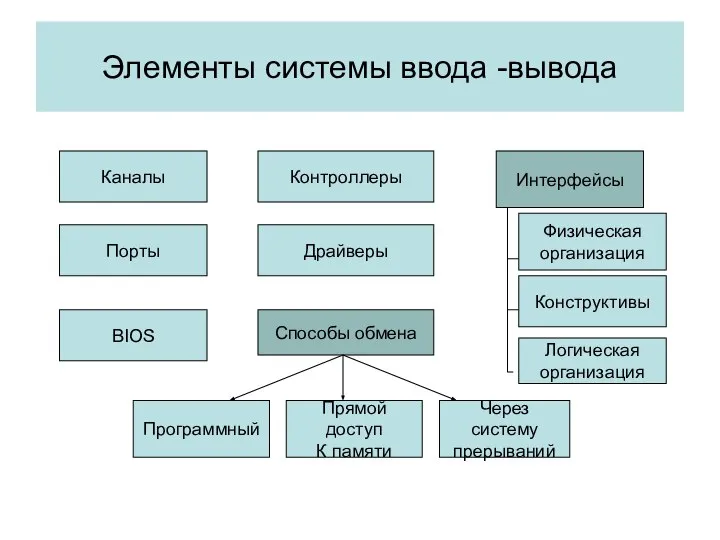
Элементы системы ввода -вывода
Каналы
Порты
Интерфейсы
Контроллеры
Драйверы
Способы обмена
Программный
Прямой доступ
К памяти
Через систему
прерываний
Физическая
организация
Конструктивы
Логическая
организация
BIOS
Элементы системы ввода -вывода
Каналы
Порты
Интерфейсы
Контроллеры
Драйверы
Способы обмена
Программный
Прямой доступ
К памяти
Через систему
прерываний
Физическая
организация
Конструктивы
Логическая
организация
BIOS
Типы ввода – вывода процессора
Изолированный ввод-вывод.
Используются специальные команды МП: ввод,
Типы ввода – вывода процессора
Изолированный ввод-вывод.
Используются специальные команды МП: ввод,
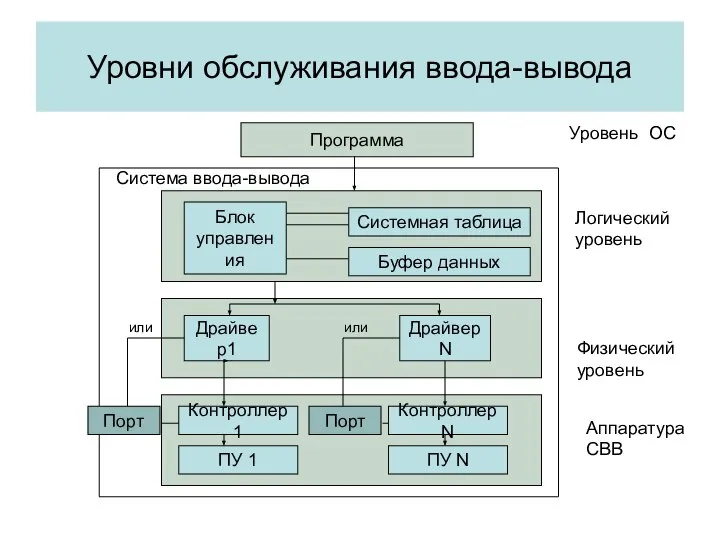
Уровни обслуживания ввода-вывода
Программа
Блок
управления
Системная таблица
Буфер данных
Драйвер1
Драйвер N
Контроллер 1
Контроллер N
ПУ 1
ПУ N
Система
Уровни обслуживания ввода-вывода
Программа
Блок
управления
Системная таблица
Буфер данных
Драйвер1
Драйвер N
Контроллер 1
Контроллер N
ПУ 1
ПУ N
Система
Функции драйверов
Проверка готовности контроллера и ПУ к обмену;
Формирование управляющих сигналов и
Функции драйверов
Проверка готовности контроллера и ПУ к обмену;
Формирование управляющих сигналов и
Способы организации СВВ
Программный.
На основе системы прерываний.
Прямой доступ к памяти.
Коммутаторный.
Без адресный «точка
Способы организации СВВ
Программный.
На основе системы прерываний.
Прямой доступ к памяти.
Коммутаторный.
Без адресный «точка
Алгоритм программного ввода-вывода под управлением процессора
1. Сформировать начальный адрес области обмена
Алгоритм программного ввода-вывода под управлением процессора
1. Сформировать начальный адрес области обмена
Система прерываний
Обработка прерывания.
Организация системы приоритетов через систему арбитража.
Система прерываний
Обработка прерывания.
Организация системы приоритетов через систему арбитража.

Диаграмма прерывания
Диаграмма прерывания
Процедура обработки прерывания
Идентификация уровня запроса прерывания и источника.
Предоставление разрешения на прерывание
Процедура обработки прерывания
Идентификация уровня запроса прерывания и источника.
Предоставление разрешения на прерывание
Характеристики систем прерывания
Время реакции Тр.
Время на переключение программ Тп=Тз+Тв.
Эффективность прерывания.
Глубина прерываний.
Характеристики систем прерывания
Время реакции Тр.
Время на переключение программ Тп=Тз+Тв.
Эффективность прерывания.
Глубина прерываний.
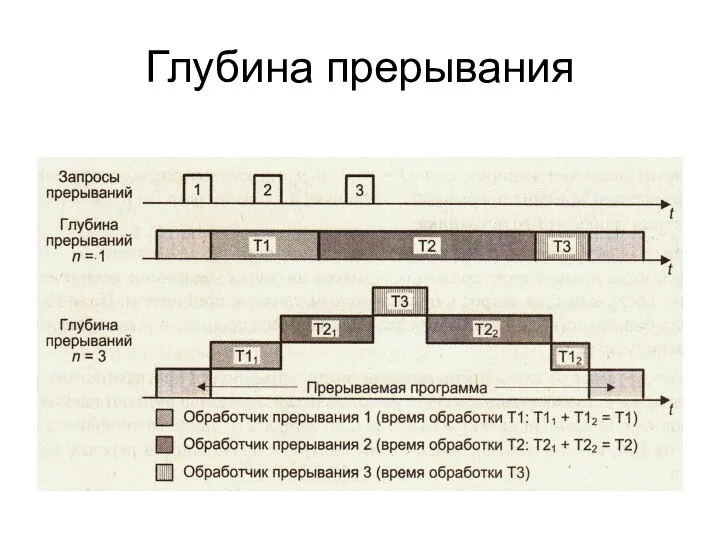
Глубина прерывания
Глубина прерывания
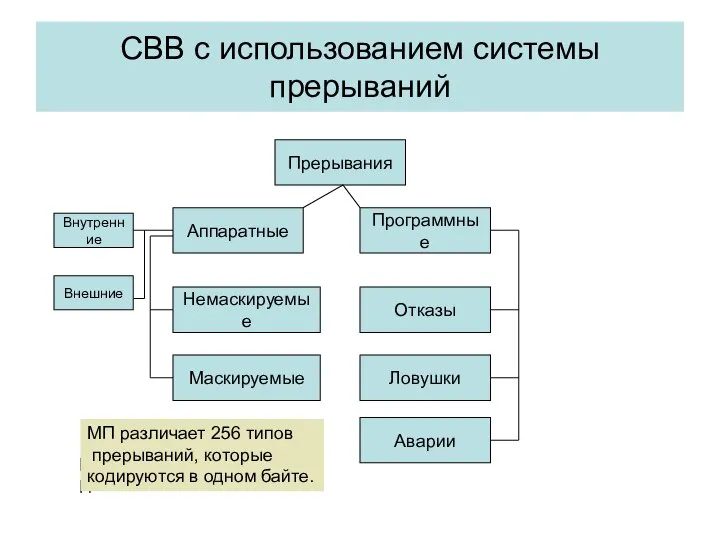
СВВ с использованием системы прерываний
Прерывания
Аппаратные
Программные
Немаскируемые
Маскируемые
Отказы
Ловушки
Аварии
МП
МП различает 256 типов
прерываний, которые
кодируются
СВВ с использованием системы прерываний
Прерывания
Аппаратные
Программные
Немаскируемые
Маскируемые
Отказы
Ловушки
Аварии
МП
МП различает 256 типов
прерываний, которые
кодируются
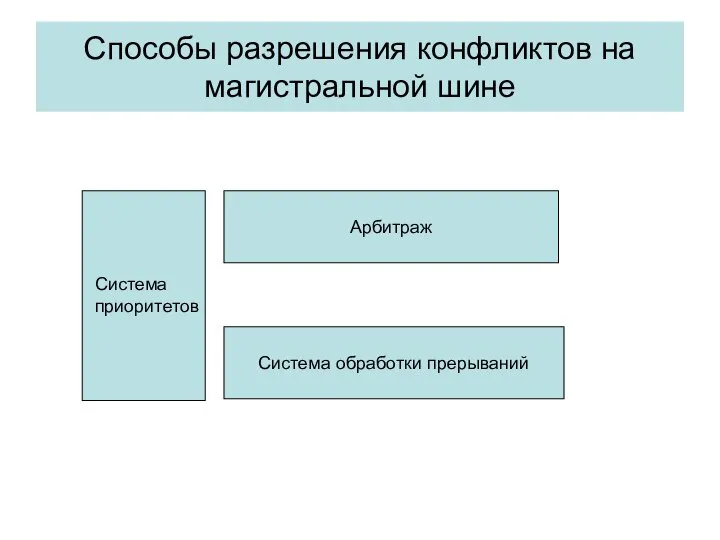
Способы разрешения конфликтов на магистральной шине
Арбитраж
Система обработки прерываний
Система
приоритетов
Способы разрешения конфликтов на магистральной шине
Арбитраж
Система обработки прерываний
Система
приоритетов
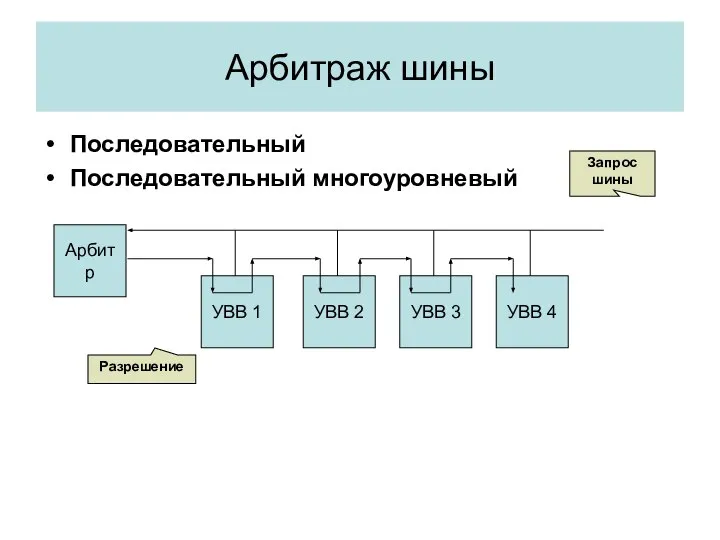
Арбитраж шины
Последовательный
Последовательный многоуровневый
Арбитр
УВВ 1
УВВ 2
УВВ 3
УВВ 4
Запрос
шины
Разрешение
Арбитраж шины
Последовательный
Последовательный многоуровневый
Арбитр
УВВ 1
УВВ 2
УВВ 3
УВВ 4
Запрос
шины
Разрешение
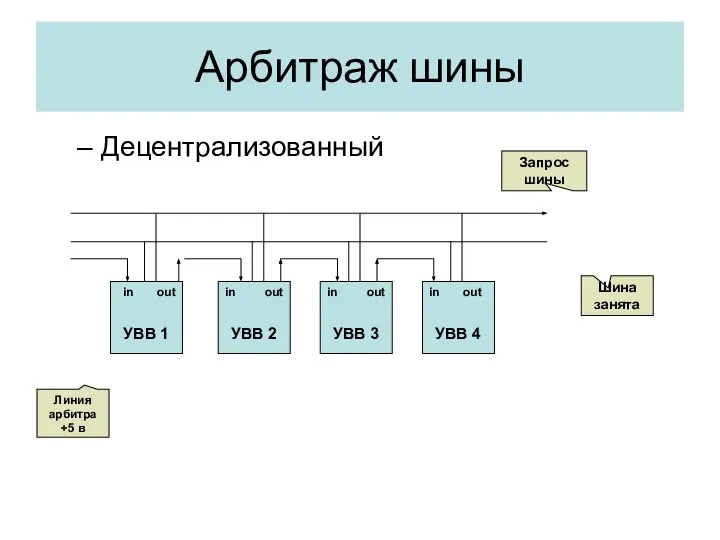
Децентрализованный
Арбитраж шины
in
out
in
in
in
out
out
out
Линия арбитра +5 в
УВВ 1
УВВ 2
УВВ 3
УВВ 4
Запрос
шины
Шина
занята
Децентрализованный
Арбитраж шины
in
out
in
in
in
out
out
out
Линия арбитра +5 в
УВВ 1
УВВ 2
УВВ 3
УВВ 4
Запрос
шины
Шина
занята
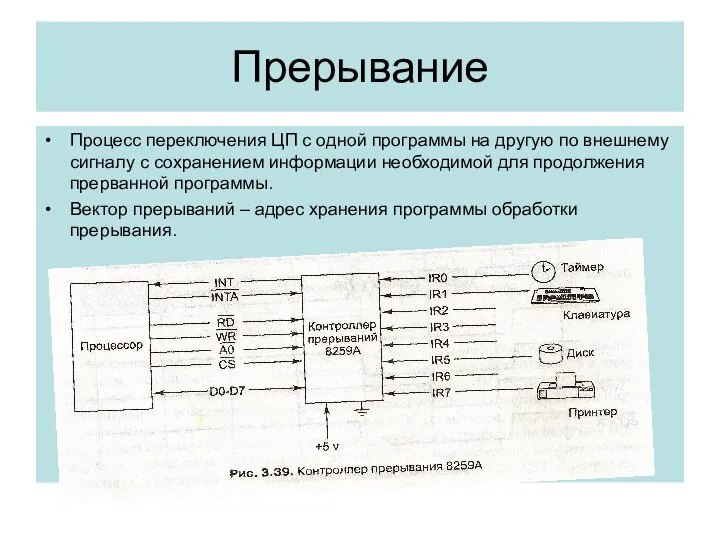
Прерывание
Процесс переключения ЦП с одной программы на другую по внешнему сигналу
Прерывание
Процесс переключения ЦП с одной программы на другую по внешнему сигналу
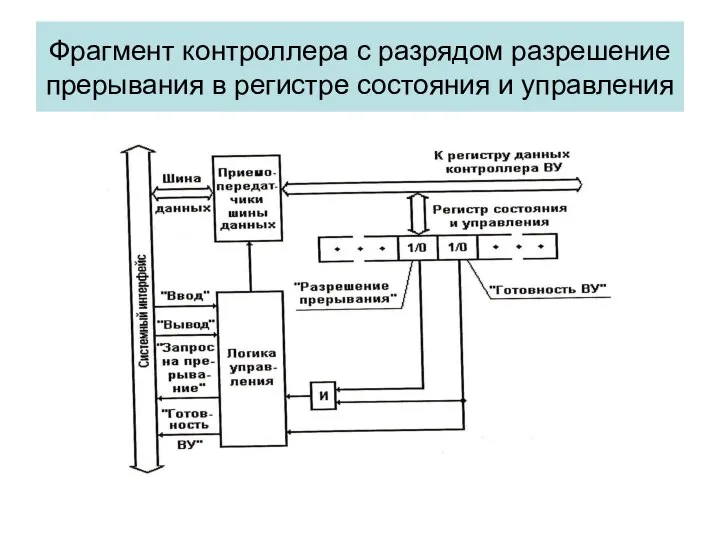
Фрагмент контроллера с разрядом разрешение
прерывания в регистре состояния и управления
Фрагмент контроллера с разрядом разрешение
прерывания в регистре состояния и управления

Вектор прерываний
Вектор прерываний
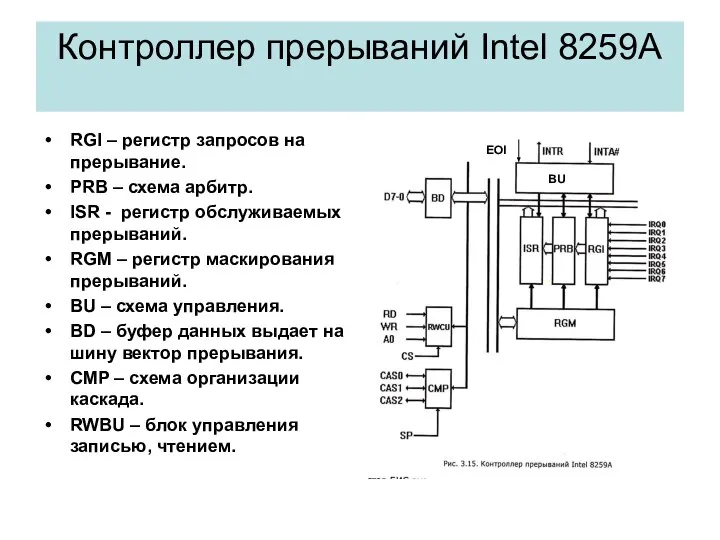
Контроллер прерываний Intel 8259A
RGI – регистр запросов на прерывание.
PRB – схема
Контроллер прерываний Intel 8259A
RGI – регистр запросов на прерывание.
PRB – схема
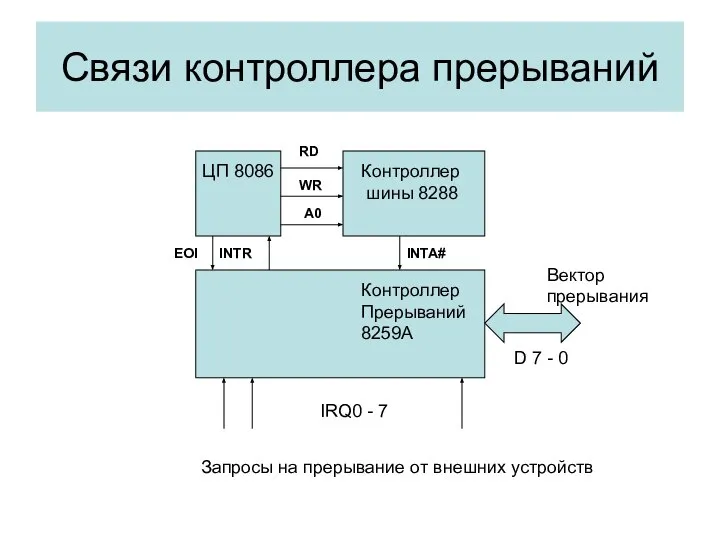
Связи контроллера прерываний
ЦП 8086
Контроллер
шины 8288
RD
WR
A0
EOI
INTR
INTA#
Контроллер
Прерываний
8259А
D 7 - 0
IRQ0 -
Связи контроллера прерываний
ЦП 8086
Контроллер
шины 8288
RD
WR
A0
EOI
INTR
INTA#
Контроллер
Прерываний
8259А
D 7 - 0
IRQ0 -
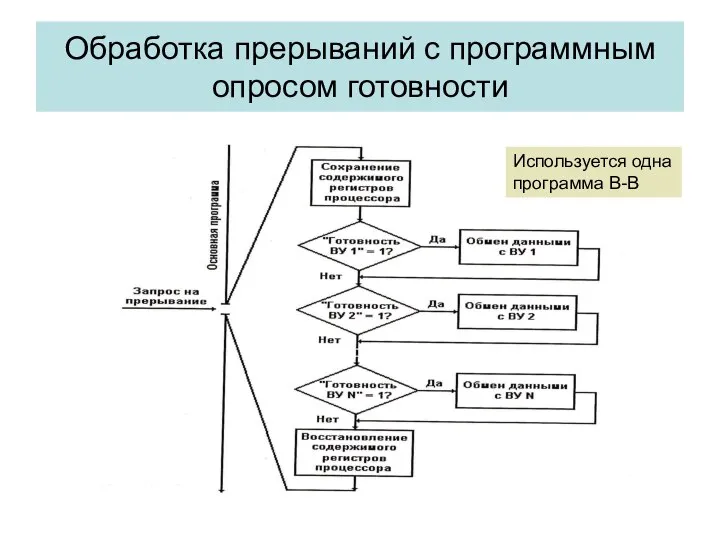
Обработка прерываний с программным опросом готовности
Используется одна
программа В-В
Обработка прерываний с программным опросом готовности
Используется одна
программа В-В
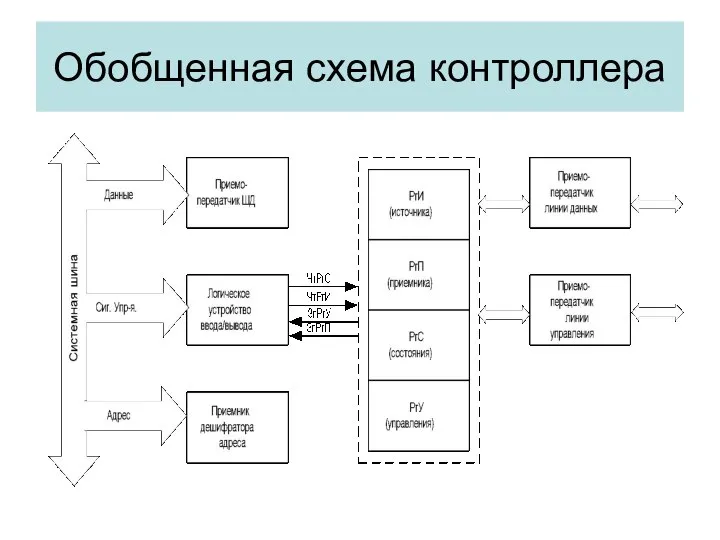
Обобщенная схема контроллера
Обобщенная схема контроллера
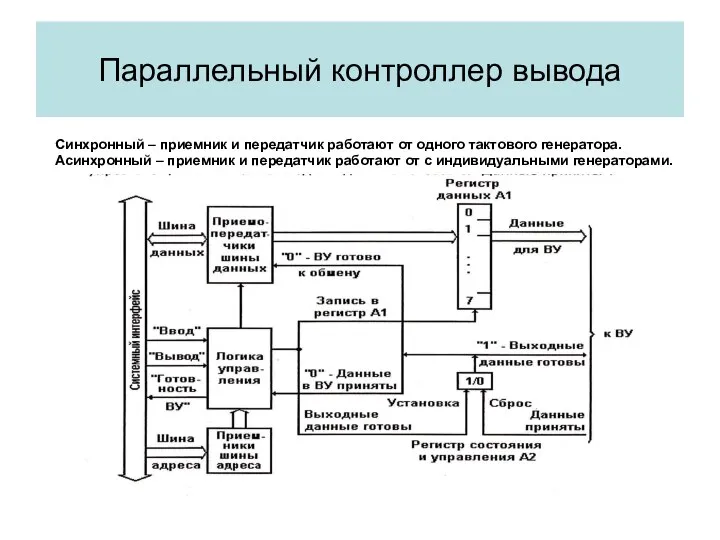
Параллельный контроллер вывода
Синхронный – приемник и передатчик работают от одного тактового
Параллельный контроллер вывода
Синхронный – приемник и передатчик работают от одного тактового
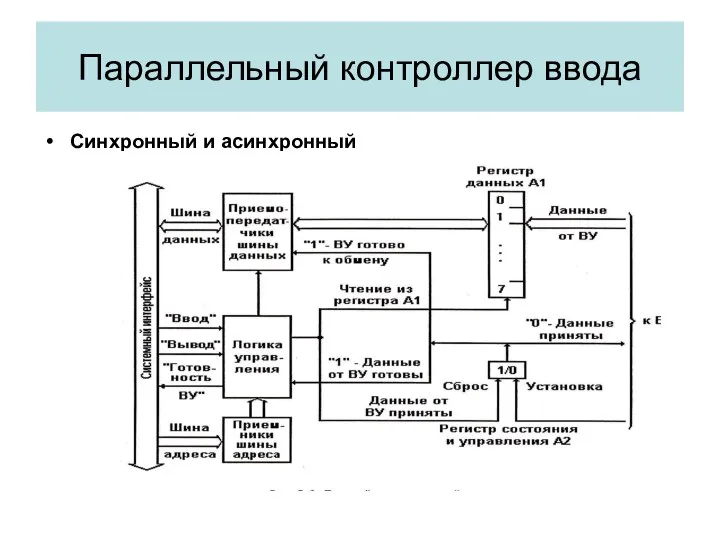
Синхронный и асинхронный
Параллельный контроллер ввода
Синхронный и асинхронный
Параллельный контроллер ввода
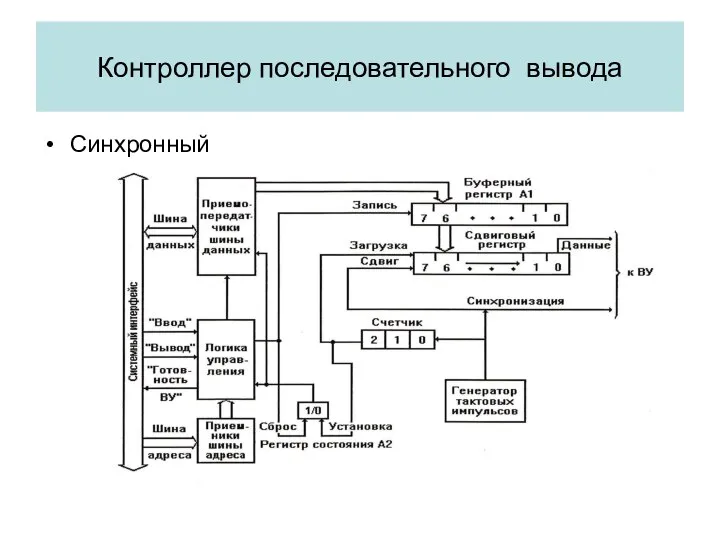
Контроллер последовательного вывода
Синхронный
Контроллер последовательного вывода
Синхронный
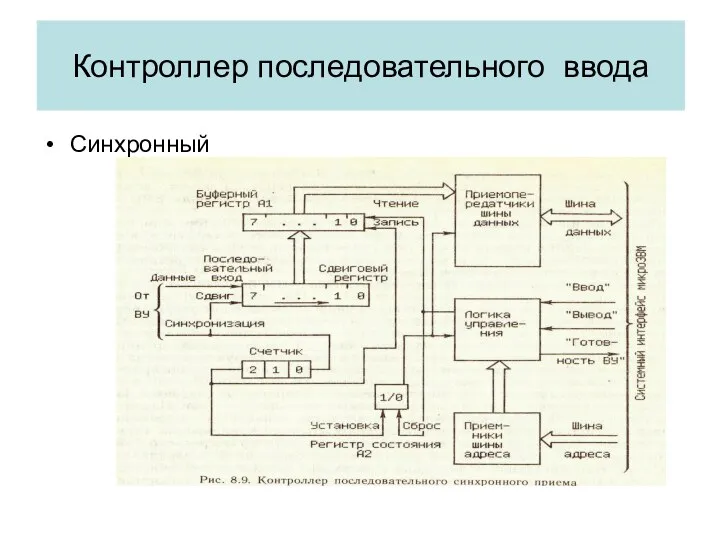
Синхронный
Контроллер последовательного ввода
Синхронный
Контроллер последовательного ввода
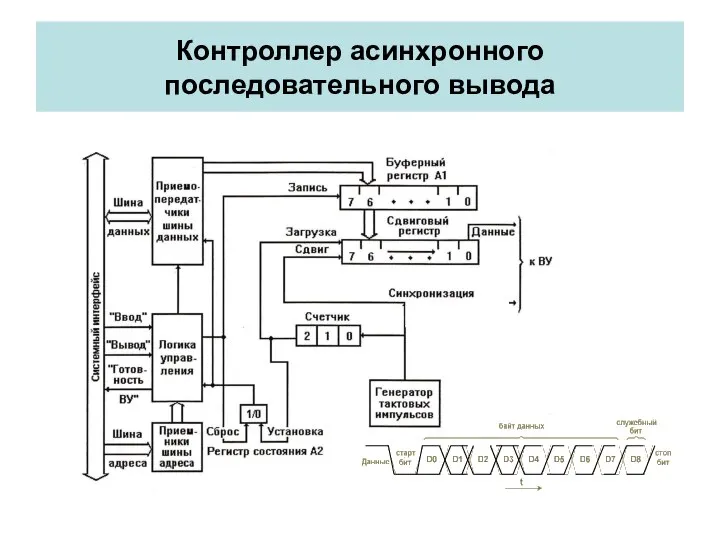
Контроллер асинхронного последовательного вывода
Контроллер асинхронного последовательного вывода
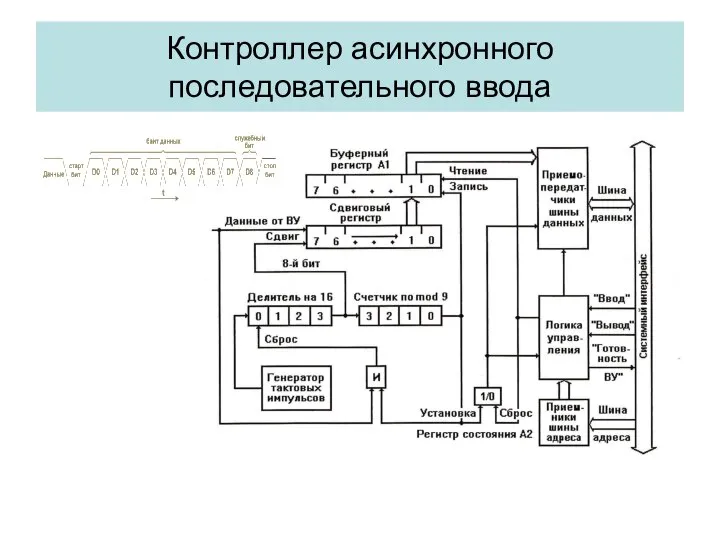
Контроллер асинхронного последовательного ввода
Контроллер асинхронного последовательного ввода
Контроллер ПДП может быть реализован как отдельное устройство, либо встраиваться в
Контроллер ПДП может быть реализован как отдельное устройство, либо встраиваться в
Структура МПС с контроллером ПДП
МП
ОЗУ
Контроллер
ПДП
ВУ
ША
ШД
ШУ
HRQ
HRQ – запрос на захват шины.
HLDA
HLDA –
Структура МПС с контроллером ПДП
МП
ОЗУ
Контроллер
ПДП
ВУ
ША
ШД
ШУ
HRQ
HRQ – запрос на захват шины.
HLDA
HLDA –
Последовательность ПДП
1. Принять запрос на ПДП от ВУ ( сигнал DRQ).
2.
Последовательность ПДП
1. Принять запрос на ПДП от ВУ ( сигнал DRQ).
2.
Контроллер прямого доступа к памяти
блок схема Intel 8237
CAR
BAR
CWR
WCR
MR
Канал 0
Канал 1
Канал 2
Канал
Контроллер прямого доступа к памяти
блок схема Intel 8237
CAR
BAR
CWR
WCR
MR
Канал 0
Канал 1
Канал 2
Канал
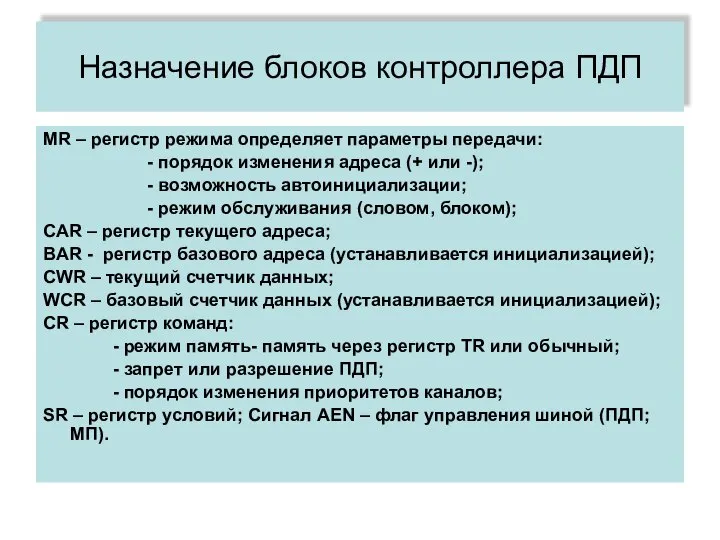
Назначение блоков контроллера ПДП
MR – регистр режима определяет параметры передачи:
-
Назначение блоков контроллера ПДП
MR – регистр режима определяет параметры передачи:
-
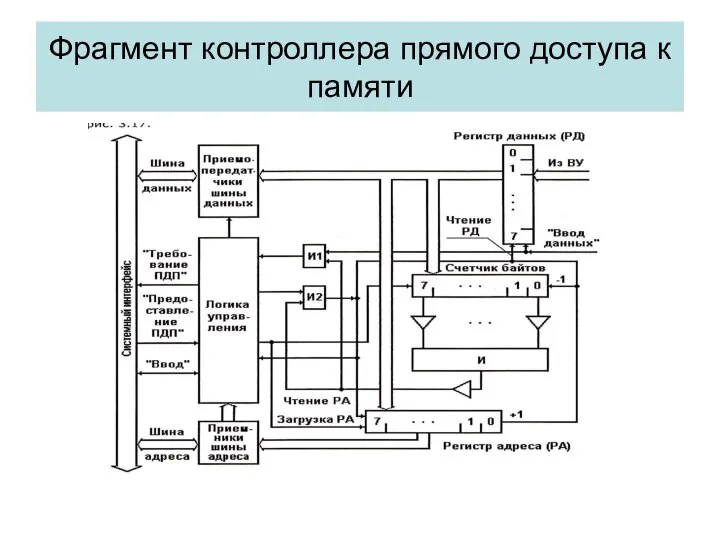
Фрагмент контроллера прямого доступа к памяти
Фрагмент контроллера прямого доступа к памяти
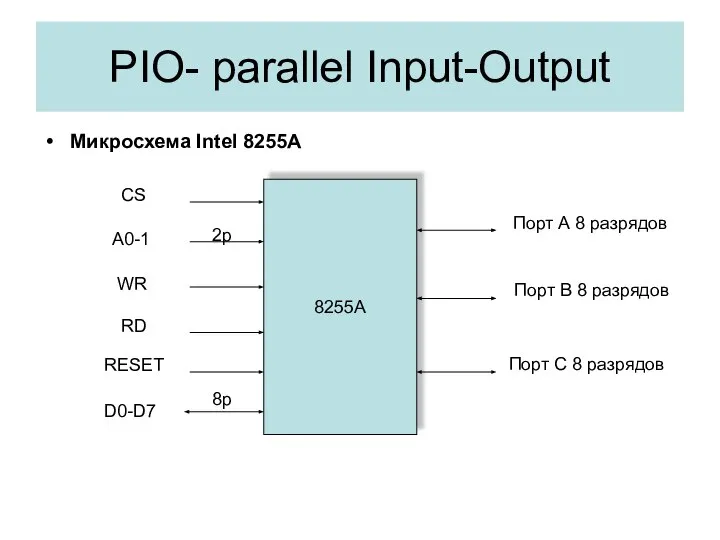
PIO- parallel Input-Output
Микросхема Intel 8255A
8255A
Порт А 8 разрядов
Порт В 8 разрядов
Порт
PIO- parallel Input-Output
Микросхема Intel 8255A
8255A
Порт А 8 разрядов
Порт В 8 разрядов
Порт
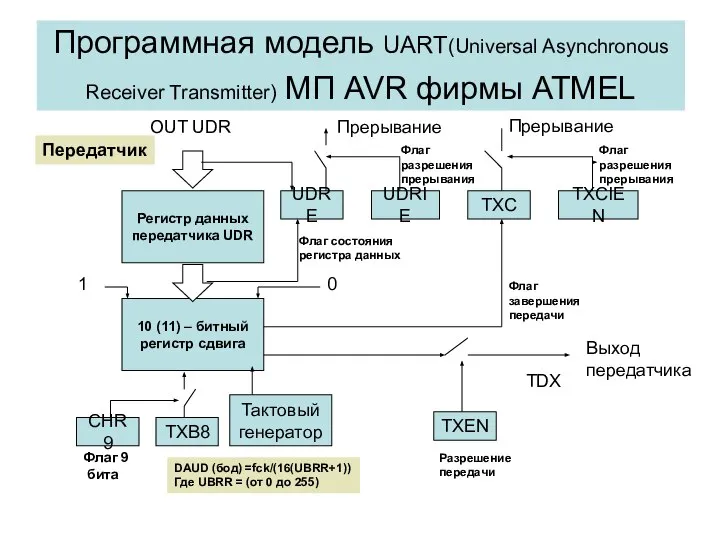
Программная модель UART(Universal Asynchronous Receiver Transmitter) МП AVR фирмы ATMEL
Регистр
Программная модель UART(Universal Asynchronous Receiver Transmitter) МП AVR фирмы ATMEL
Регистр
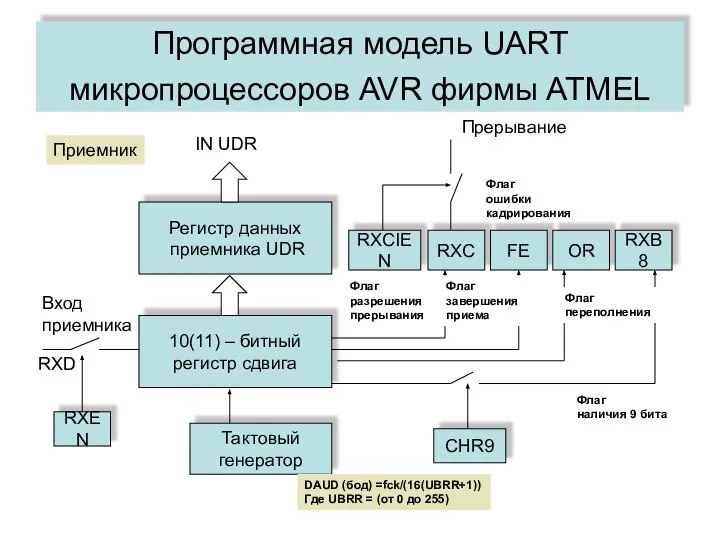
Программная модель UART микропроцессоров AVR фирмы ATMEL
Регистр данных
приемника UDR
10(11)
Программная модель UART микропроцессоров AVR фирмы ATMEL
Регистр данных
приемника UDR
10(11)
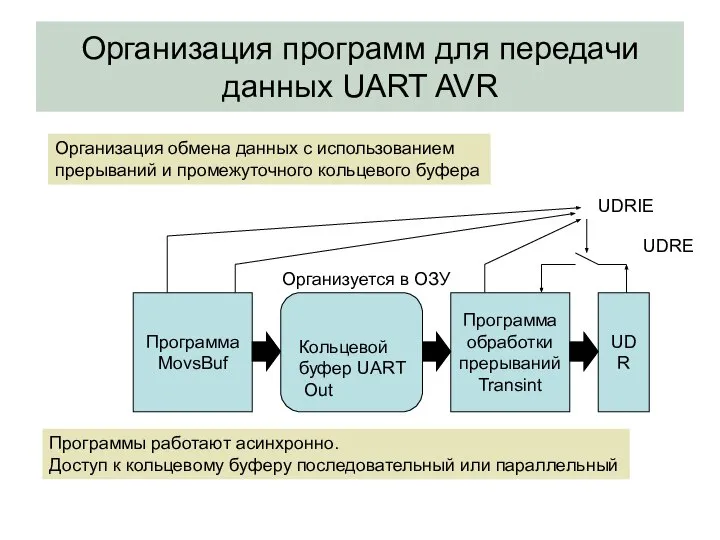
Организация программ для передачи данных UART AVR
Программа
MovsBuf
Программа
обработки
прерываний
Transint
UDR
Организация обмена данных с
Организация программ для передачи данных UART AVR
Программа
MovsBuf
Программа
обработки
прерываний
Transint
UDR
Организация обмена данных с
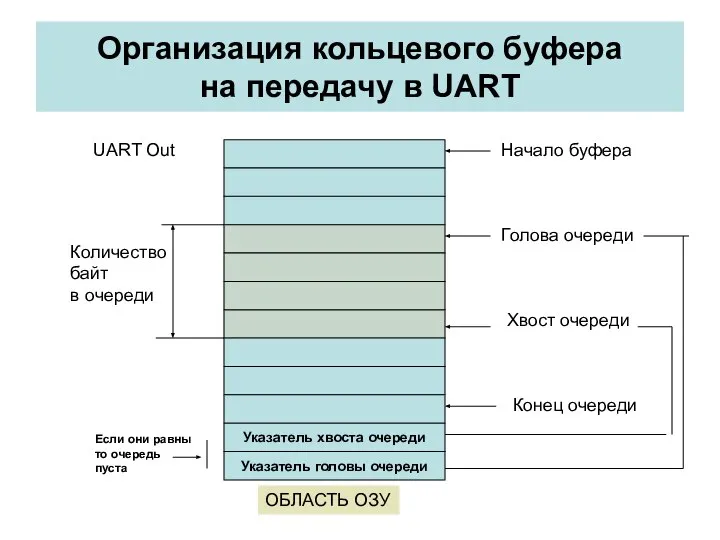
Организация кольцевого буфера
на передачу в UART
Указатель хвоста очереди
Указатель головы очереди
Начало буфера
Голова
Организация кольцевого буфера
на передачу в UART
Указатель хвоста очереди
Указатель головы очереди
Начало буфера
Голова
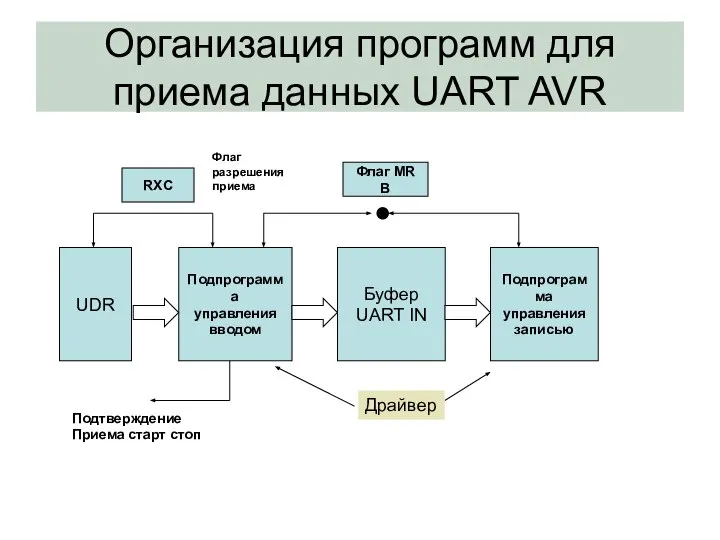
Организация программ для приема данных UART AVR
Подпрограмма
управления
вводом
Буфер
UART IN
Подпрограмма
управления
записью
UDR
Флаг MR B
Подтверждение
Приема старт
Организация программ для приема данных UART AVR
Подпрограмма
управления
вводом
Буфер
UART IN
Подпрограмма
управления
записью
UDR
Флаг MR B
Подтверждение
Приема старт
 Эпидситуация по столбняку
Эпидситуация по столбняку  Презентация СРАВНИТЕЛЬНЫЙ АНАЛИЗ СОСТОЯНИЯ И РАЗВИТИЯ РЫНКОВ ТОРГОВЛИ МЕДИЦИНСКИМ ОБОРУДОВАНИЕМ В РОССИИ И ЗА РУБЕЖОМ
Презентация СРАВНИТЕЛЬНЫЙ АНАЛИЗ СОСТОЯНИЯ И РАЗВИТИЯ РЫНКОВ ТОРГОВЛИ МЕДИЦИНСКИМ ОБОРУДОВАНИЕМ В РОССИИ И ЗА РУБЕЖОМ  Викторина
Викторина Культура и личность
Культура и личность Бизнес план Кафе «Уютный дворик»
Бизнес план Кафе «Уютный дворик» Идентификация и обнаружение фальсификации продуктов животного происхождения
Идентификация и обнаружение фальсификации продуктов животного происхождения Инструменты и принадлежности сварщика
Инструменты и принадлежности сварщика Sales
Sales Тематический парк. 1С Hello Kitty. План по проекту
Тематический парк. 1С Hello Kitty. План по проекту Лексика языка Java
Лексика языка Java Sport tourism
Sport tourism Хаттама Хаттама
Хаттама Хаттама ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ РЫНКА ЦЕННЫХ БУМАГ Финансовая информация в деловой прессе Фондовые индексы Рейтинги ценных бума
ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ РЫНКА ЦЕННЫХ БУМАГ Финансовая информация в деловой прессе Фондовые индексы Рейтинги ценных бума Палитра души
Палитра души Инерциальные навигационные системы. (Тема 3)
Инерциальные навигационные системы. (Тема 3) Аортальные пороки (packed)
Аортальные пороки (packed) «Музеи в орбите учебно-воспитательного процесса в начальной школе: эффекты и феномены»
«Музеи в орбите учебно-воспитательного процесса в начальной школе: эффекты и феномены» Основные формы внеурочной физкультурно-спортивной деятельности
Основные формы внеурочной физкультурно-спортивной деятельности Экономическое развитие региона в условиях выхода из мирового финансового кризиса Конкурс творческих работ студентов гр. 44БД спе
Экономическое развитие региона в условиях выхода из мирового финансового кризиса Конкурс творческих работ студентов гр. 44БД спе Ұйымда жеке тұлғалық мінез-құлықтың ерекшелігі, когнитивті диссонанс
Ұйымда жеке тұлғалық мінез-құлықтың ерекшелігі, когнитивті диссонанс Вступ до спортивної морфології
Вступ до спортивної морфології Гетто Воркаут
Гетто Воркаут Здоровьесберегающие технологии
Здоровьесберегающие технологии Рисование в технике Граттаж
Рисование в технике Граттаж Статистический анализ энергетического рынка Европы
Статистический анализ энергетического рынка Европы Устами младенца - презентация для начальной школы_
Устами младенца - презентация для начальной школы_ Инженерная графика. Введение
Инженерная графика. Введение Анализ педагогической деятельности
Анализ педагогической деятельности