- Пути реализации алгоритма векторного управления и состояние дел в ПО MusCB

Содержание
- 2. Цели презентации Презентовать пути реализации ВУ в ПО MusCB для сустава робота и состояние дел в
- 3. Пути реализации ВУ в ПО MusCB 1 Подключение алгоритма ВУ ВД используемого нашей компанией(алгоритмы Сикалова); 2
- 4. Пути реализации ВУ в ПО MusCB Выбор типа ВУ( датчиковое и бездатчиковое): В связи с необходимостью
- 5. Функциональная схема датчикового ВУ Итого, для реализации предложенной схемы необходимо: - Измерительная система; Параметры двигателя; Контур
- 6. Измерительная система Реализовано для ВУ: Измерение токов; Ud; В рамках разработки ПО были проведены следующие эксперименты:
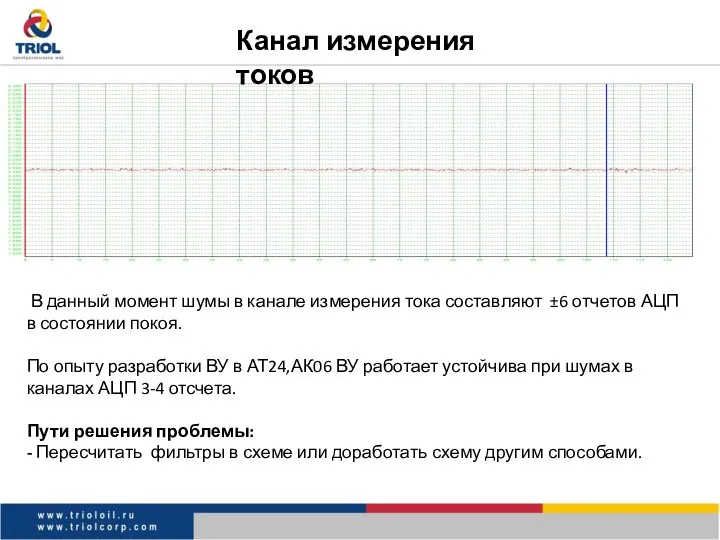
- 7. Канал измерения токов В данный момент шумы в канале измерения тока составляют ±6 отчетов АЦП в
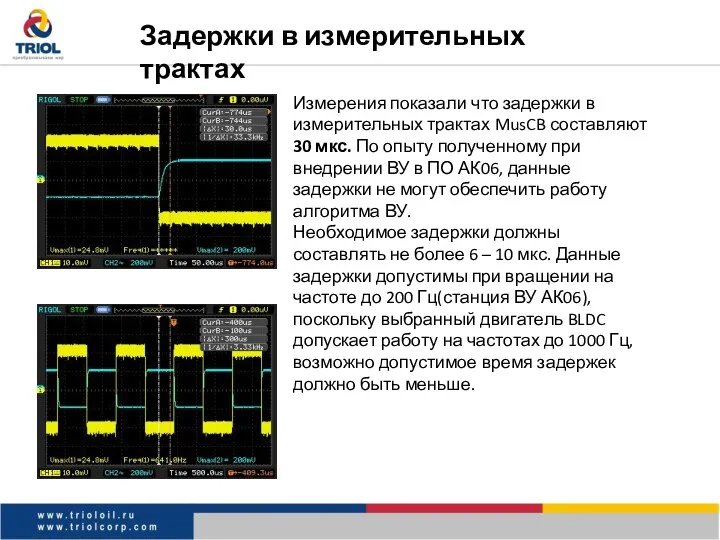
- 8. Задержки в измерительных трактах Измерения показали что задержки в измерительных трактах MusCB составляют 30 мкс. По
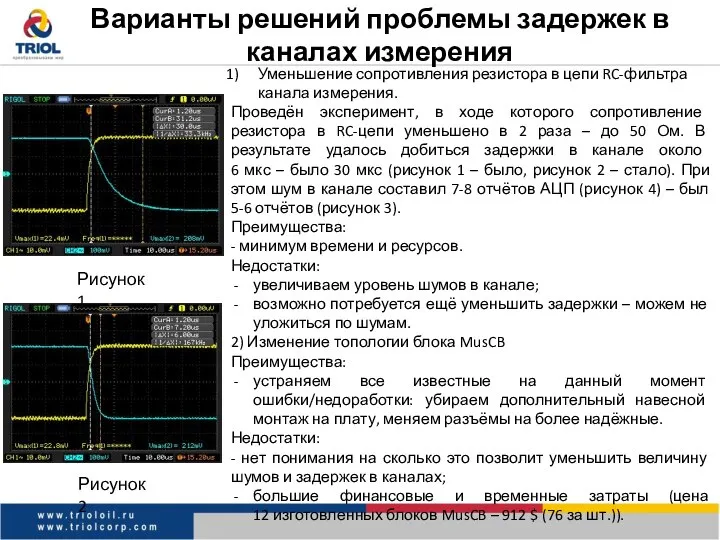
- 9. Варианты решений проблемы задержек в каналах измерения Уменьшение сопротивления резистора в цепи RC-фильтра канала измерения. Проведён
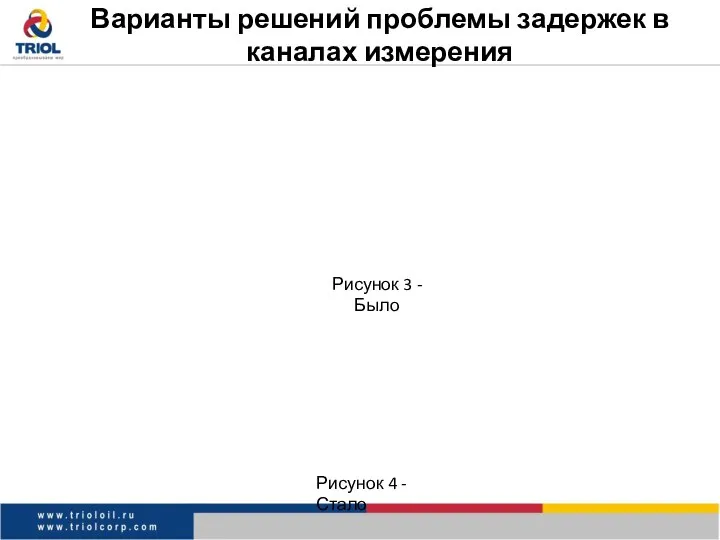
- 10. Варианты решений проблемы задержек в каналах измерения Рисунок 3 - Было Рисунок 4 - Стало
- 11. Измерение параметров двигателя На основе электрических параметров строится наблюдатель положения ротора, производится расчет коэффициентов регуляторов и
- 12. Датчик положения ротора Датчик Cos/Sin KMZ60. Реализовано: -Опрос датчика, обработка информации. Проблема: Датчик позволяет определить положение
- 13. Раздача задания для PWM В связи с тем что наша библиотека базируется для микроконтроллеров от TI,
- 14. Особенности двигателя BLDC Существующие алгоритмы рассчитаны на вентильный двигатель с синусоидальной формой противо - ЭДС. Двигатель
- 15. Этапы разработки: 1) Стартуем с нулевой скорости. Точность отработки задания - 5% (цифру можно обсуждать). На
- 16. Проверка ВУ ВД На втором этапе разработки(качественное управление моментом) возникает необходимость в стенде для проверки ВУ.
- 18. Скачать презентацию
Цели презентации
Презентовать пути реализации ВУ в ПО MusCB для сустава
робота и
Цели презентации
Презентовать пути реализации ВУ в ПО MusCB для сустава
робота и
Пути реализации ВУ в ПО MusCB
1 Подключение алгоритма ВУ ВД используемого
Пути реализации ВУ в ПО MusCB
1 Подключение алгоритма ВУ ВД используемого
Пути реализации ВУ в ПО MusCB
Выбор типа ВУ( датчиковое и бездатчиковое):
В
Пути реализации ВУ в ПО MusCB
Выбор типа ВУ( датчиковое и бездатчиковое):
В

Функциональная схема датчикового ВУ
Итого, для реализации предложенной схемы необходимо:
- Измерительная система;
Функциональная схема датчикового ВУ
Итого, для реализации предложенной схемы необходимо:
- Измерительная система;
Измерительная система
Реализовано для ВУ:
Измерение токов;
Ud;
В рамках разработки ПО были проведены следующие
Измерительная система
Реализовано для ВУ:
Измерение токов;
Ud;
В рамках разработки ПО были проведены следующие
Канал измерения токов
В данный момент шумы в канале измерения тока
Канал измерения токов
В данный момент шумы в канале измерения тока
Задержки в измерительных трактах
Измерения показали что задержки в измерительных трактах MusCB
Задержки в измерительных трактах
Измерения показали что задержки в измерительных трактах MusCB
Варианты решений проблемы задержек в каналах измерения
Уменьшение сопротивления резистора в цепи
Варианты решений проблемы задержек в каналах измерения
Уменьшение сопротивления резистора в цепи
Варианты решений проблемы задержек в каналах измерения
Рисунок 3 - Было
Рисунок 4
Варианты решений проблемы задержек в каналах измерения
Рисунок 3 - Было
Рисунок 4
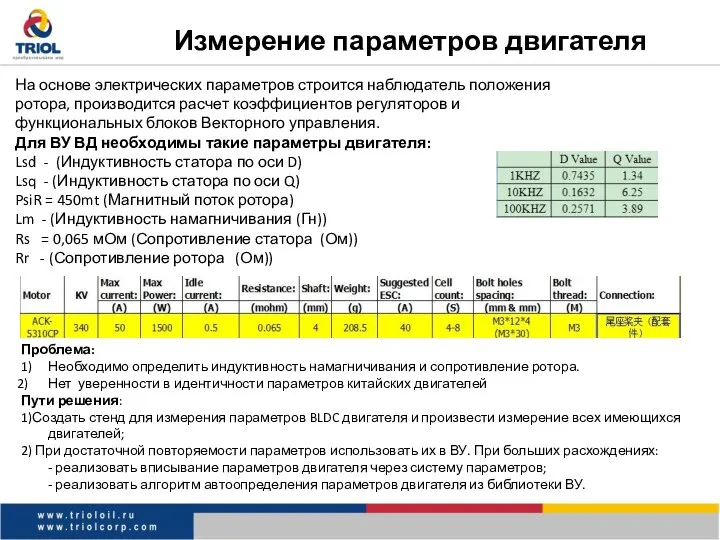
Измерение параметров двигателя
На основе электрических параметров строится наблюдатель положения ротора, производится
Измерение параметров двигателя
На основе электрических параметров строится наблюдатель положения ротора, производится
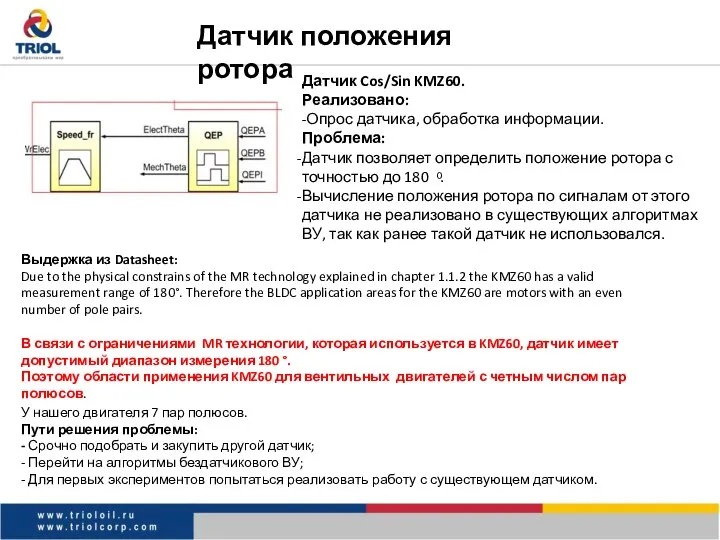
Датчик положения ротора
Датчик Cos/Sin KMZ60.
Реализовано:
-Опрос датчика, обработка информации.
Проблема:
Датчик позволяет определить положение
Датчик положения ротора
Датчик Cos/Sin KMZ60.
Реализовано:
-Опрос датчика, обработка информации.
Проблема:
Датчик позволяет определить положение
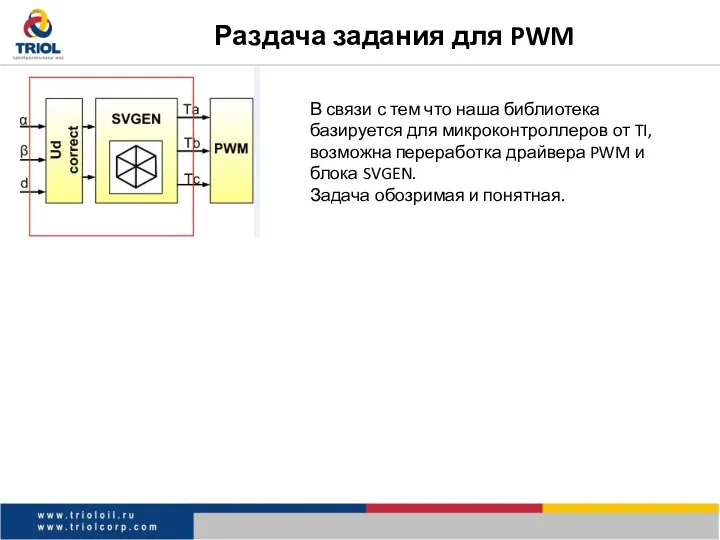
Раздача задания для PWM
В связи с тем что наша библиотека базируется
Раздача задания для PWM
В связи с тем что наша библиотека базируется
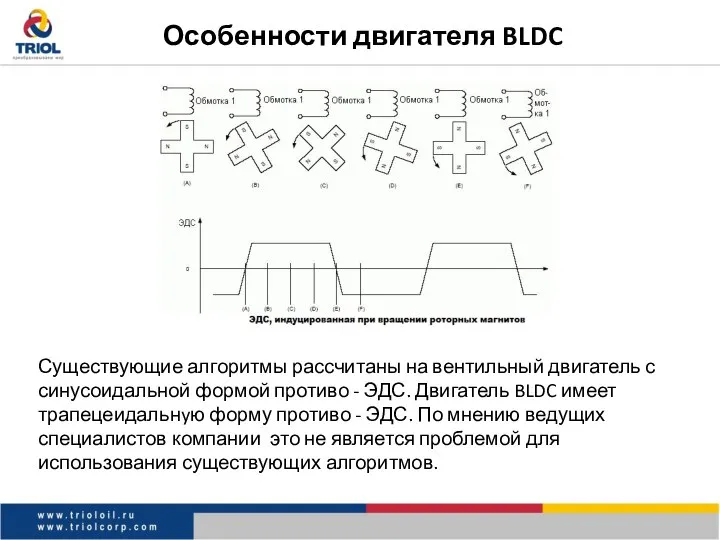
Особенности двигателя BLDC
Существующие алгоритмы рассчитаны на вентильный двигатель с синусоидальной формой
Особенности двигателя BLDC
Существующие алгоритмы рассчитаны на вентильный двигатель с синусоидальной формой
Этапы разработки:
1) Стартуем с нулевой скорости. Точность отработки задания - 5%
Этапы разработки:
1) Стартуем с нулевой скорости. Точность отработки задания - 5%

Проверка ВУ ВД
На втором этапе разработки(качественное управление моментом) возникает необходимость
Проверка ВУ ВД
На втором этапе разработки(качественное управление моментом) возникает необходимость
 Переходный возраст Урок №1 Обществознание 7 класс
Переходный возраст Урок №1 Обществознание 7 класс Украинская культура
Украинская культура  1 апреля - день шуток и смеха
1 апреля - день шуток и смеха Политическая власть
Политическая власть Презентация на тему "Детская агрессивность и её причины" - скачать презентации по Педагогике
Презентация на тему "Детская агрессивность и её причины" - скачать презентации по Педагогике Дифференцируемая функция
Дифференцируемая функция ДЕЯТЕЛЬНОСТЬ ЧЕЛОВЕКА И ПОТРЕБНОСТЬ В УПРАВЛЕНИИ
ДЕЯТЕЛЬНОСТЬ ЧЕЛОВЕКА И ПОТРЕБНОСТЬ В УПРАВЛЕНИИ КОМПЬЮТЕРНЫЕ ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ
КОМПЬЮТЕРНЫЕ ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ Понятие ,признаки и особенности жилища Подготовили: студенты группы Ю092 Виноградская Екатерина Ганеева Марина
Понятие ,признаки и особенности жилища Подготовили: студенты группы Ю092 Виноградская Екатерина Ганеева Марина Функціональне призначення Збройних Сил України
Функціональне призначення Збройних Сил України Монополия. Антимонопольная деятельность государства Основные вопросы: 1. Сущность и виды монополии. 2. Типы и формы монополий. 3. У
Монополия. Антимонопольная деятельность государства Основные вопросы: 1. Сущность и виды монополии. 2. Типы и формы монополий. 3. У Имитация хода коня с помощью рекурсии
Имитация хода коня с помощью рекурсии Дискретное преобразование Фурье Обратное пространство. Фурье-преобразование. Быстрое фурье-преобразование
Дискретное преобразование Фурье Обратное пространство. Фурье-преобразование. Быстрое фурье-преобразование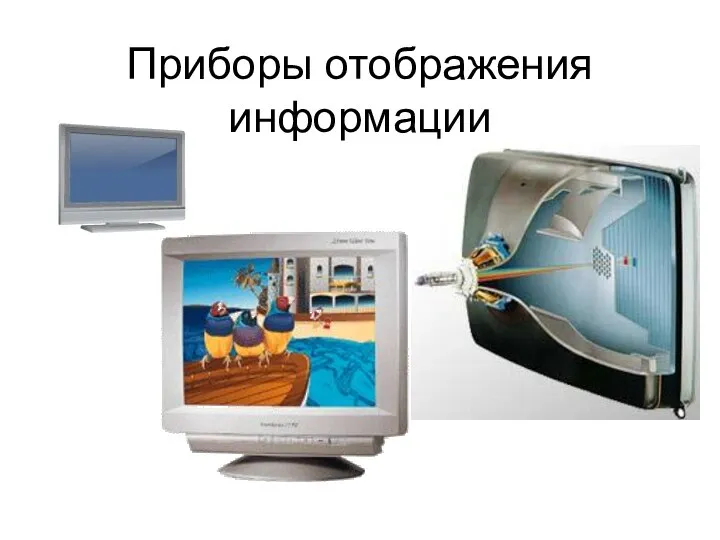 Приборы отображения информации
Приборы отображения информации Назначение и устройство ходовой части автомобиля
Назначение и устройство ходовой части автомобиля Фай В.С. ЛААГ. Презентація до лекції № 3 (1)
Фай В.С. ЛААГ. Презентація до лекції № 3 (1) Презентация на тему "Новый порядок аттестации педагогических работников с 2015 года" - скачать презентации по Педагогике
Презентация на тему "Новый порядок аттестации педагогических работников с 2015 года" - скачать презентации по Педагогике Организационные основы управления в таможенных органах
Организационные основы управления в таможенных органах Профилактика и коррекция плоскостопия у детей дошкольного возраста
Профилактика и коррекция плоскостопия у детей дошкольного возраста Инструкция пополнения. Яндекс-Кошелек
Инструкция пополнения. Яндекс-Кошелек Корпоративное право
Корпоративное право Презентация на тему "Гипотиреоз в практике семейного врача" - скачать презентации по Медицине
Презентация на тему "Гипотиреоз в практике семейного врача" - скачать презентации по Медицине Разработка алгоритмов и программ сверху вниз
Разработка алгоритмов и программ сверху вниз Методы исследования механической активности сердца
Методы исследования механической активности сердца Формирование понятий в изучении темы «Алгоритмизация» предмета «Информатика и ИКТ» Северова Татьяна Владимировна, учитель высш
Формирование понятий в изучении темы «Алгоритмизация» предмета «Информатика и ИКТ» Северова Татьяна Владимировна, учитель высш Презентация "Здравствуй, лагерь! Привет всем!" - скачать презентации по МХК
Презентация "Здравствуй, лагерь! Привет всем!" - скачать презентации по МХК МЕТОДЫ ИМПЛАНТАЦИИ. ВИДЫ И МЕТОДЫ ОРТОПЕДИЧЕСКОГО ЛЕЧЕНИЯ НА ИМПЛАНТАТАХ. КРИТЕРИИ ОЦЕНКИ ИМПЛАНТАЦИИ. Лазаренко А.В. 501стом
МЕТОДЫ ИМПЛАНТАЦИИ. ВИДЫ И МЕТОДЫ ОРТОПЕДИЧЕСКОГО ЛЕЧЕНИЯ НА ИМПЛАНТАТАХ. КРИТЕРИИ ОЦЕНКИ ИМПЛАНТАЦИИ. Лазаренко А.В. 501стом  Методы социальной психологии
Методы социальной психологии