- Разработка мехатронного модуля выдвижного устройства гидрологического прибора

Содержание
- 2. Цель работы: Разработать мехатронный модуль выдвижного устройства гидрологического прибора Основные требования к прибору и устройству: Исполнительные
- 3. Основные задачи разработки: Создание исполнительного механизма прибора для установки датчика за пограничный слой воды. А так
- 4. Подводные аппараты и их характеристики Аппараты: малых глубин (до 600 м), средних глубин (до 2000 м)
- 5. Выбор объекта установки прибора – глубоководный аппарат 5
- 6. Расчет Результирующее усилие необходимое для выдвижения: Коэффициент полезного действия модуля: 6
- 7. Предварительные эскизные компоновки и результаты 7
- 8. Экспресс-анализ деталей ходовых винтов с помощью модуля T-Flex Анализ 8
- 9. Общий вид прибора 9
- 10. Сборочный чертеж механизма 10
- 11. Деталировка 11
- 12. Структурная схема управления электронная плата управления выдвижением (УПВ); датчики (датчик вибрации, датчики положения механизма – концевые
- 13. Плата управления выдвижением Схема электрическая принципиальная и Перечень элементов 13
- 14. Выдвижение в рабочее положение 14
- 15. Рабочее положение 15
- 17. Скачать презентацию
Цель работы: Разработать мехатронный модуль
выдвижного устройства гидрологического прибора
Основные требования к прибору
Цель работы: Разработать мехатронный модуль
выдвижного устройства гидрологического прибора
Основные требования к прибору
Основные задачи разработки:
Создание исполнительного механизма прибора для установки датчика за пограничный
Основные задачи разработки:
Создание исполнительного механизма прибора для установки датчика за пограничный
Подводные аппараты и их характеристики
Аппараты: малых глубин (до 600 м),
Подводные аппараты и их характеристики
Аппараты: малых глубин (до 600 м),

Выбор объекта установки прибора – глубоководный аппарат
5
Выбор объекта установки прибора – глубоководный аппарат
5
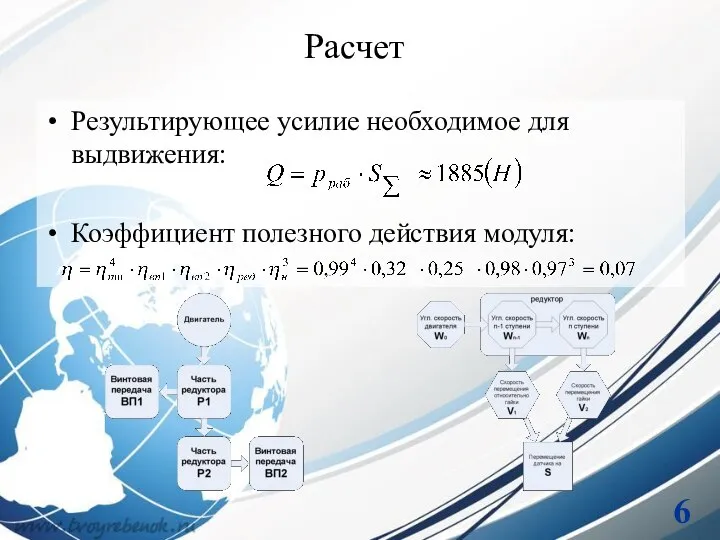
Расчет
Результирующее усилие необходимое для выдвижения:
Коэффициент полезного действия модуля:
6
Расчет
Результирующее усилие необходимое для выдвижения:
Коэффициент полезного действия модуля:
6

Предварительные эскизные компоновки
и результаты
7
Предварительные эскизные компоновки
и результаты
7
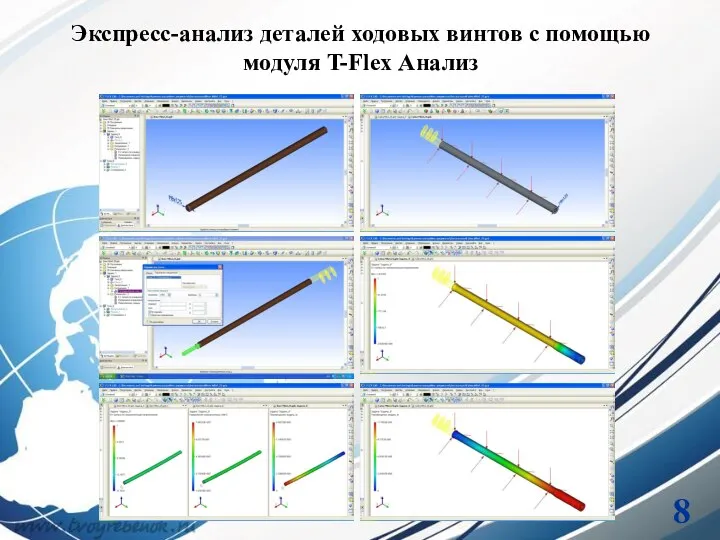
Экспресс-анализ деталей ходовых винтов с помощью модуля T-Flex Анализ
8
Экспресс-анализ деталей ходовых винтов с помощью модуля T-Flex Анализ
8
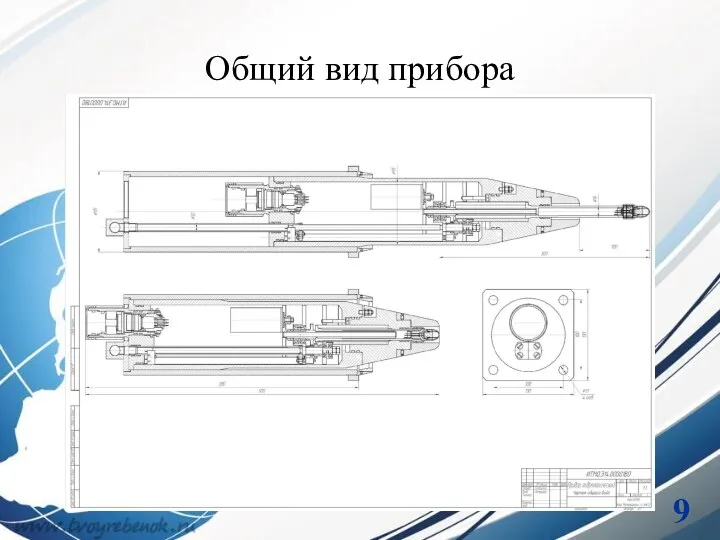
Общий вид прибора
9
Общий вид прибора
9

Сборочный чертеж механизма
10
Сборочный чертеж механизма
10
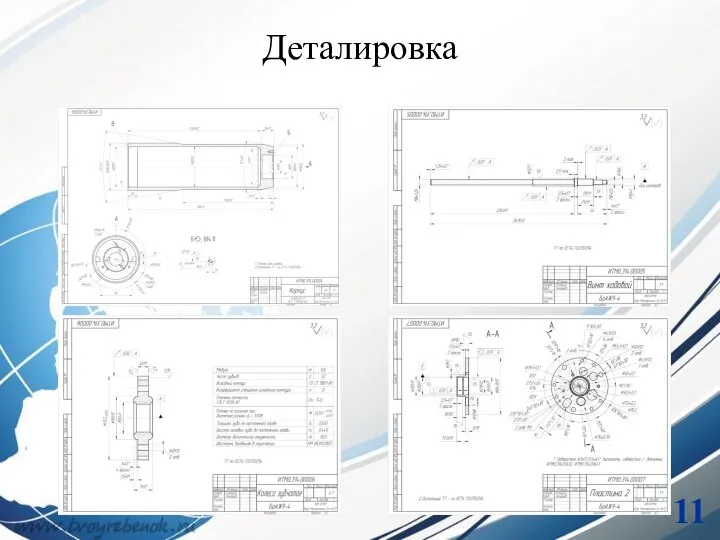
Деталировка
11
Деталировка
11
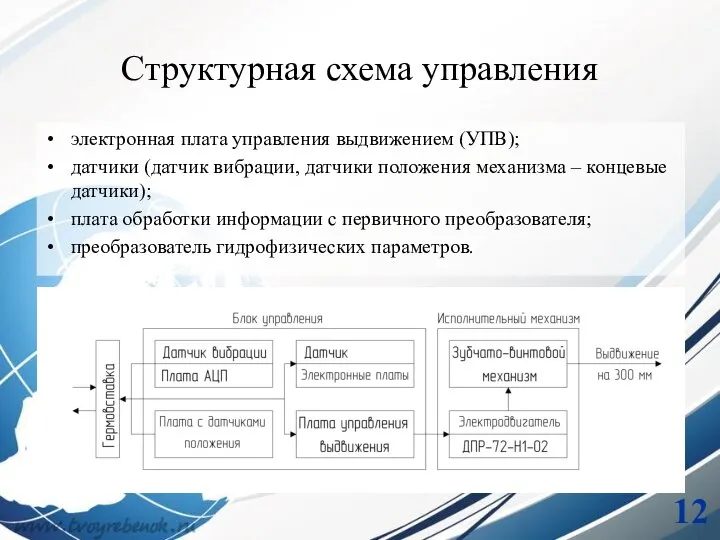
Структурная схема управления
электронная плата управления выдвижением (УПВ);
датчики (датчик вибрации, датчики положения
Структурная схема управления
электронная плата управления выдвижением (УПВ);
датчики (датчик вибрации, датчики положения
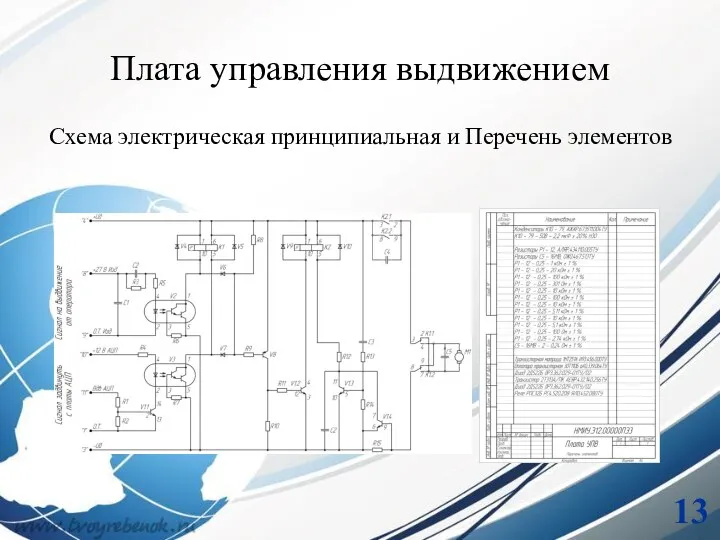
Плата управления выдвижением
Схема электрическая принципиальная и Перечень элементов
13
Плата управления выдвижением
Схема электрическая принципиальная и Перечень элементов
13
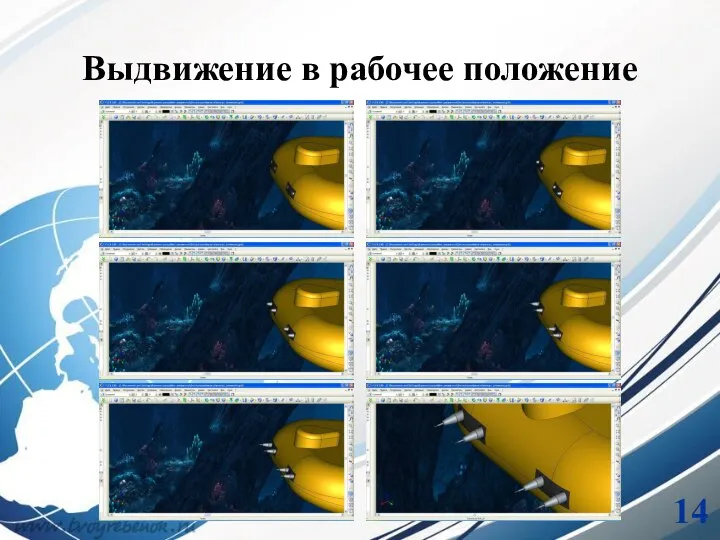
Выдвижение в рабочее положение
14
Выдвижение в рабочее положение
14
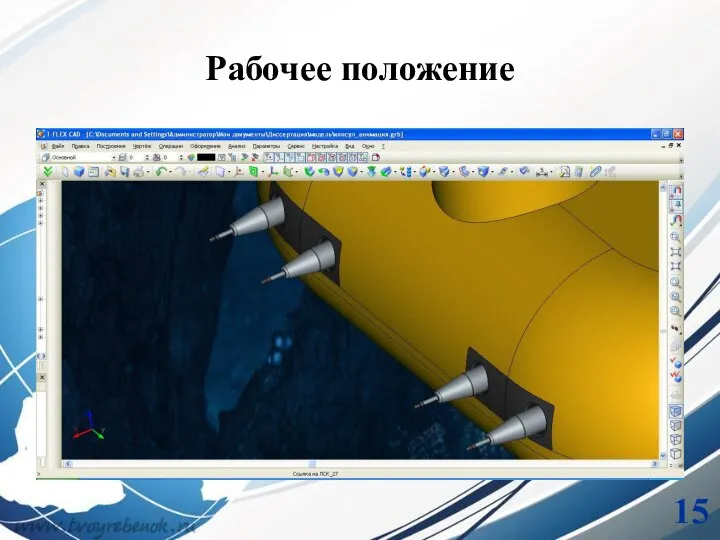
Рабочее положение
15
Рабочее положение
15
 Огнестойкость СК.ppt
Огнестойкость СК.ppt Время и место совершения исполнительных действий и применения мер принудительного исполнения Выполнили студентки группы Ю-103 Мя
Время и место совершения исполнительных действий и применения мер принудительного исполнения Выполнили студентки группы Ю-103 Мя Страх и ненависть в платежных системах (DevConf)
Страх и ненависть в платежных системах (DevConf) Буллинг – психолого-педагогические причины и следствия Дульцева Е.В. Педагог-психолог МОУ Столбовской СОШ
Буллинг – психолого-педагогические причины и следствия Дульцева Е.В. Педагог-психолог МОУ Столбовской СОШ Политические партии и общественные объединения
Политические партии и общественные объединения Органическая химия
Органическая химия  Город Тула. Занятия оригами
Город Тула. Занятия оригами Пресс центр (Япония)
Пресс центр (Япония) Добро пожаловать в Юсьву
Добро пожаловать в Юсьву Проблемное обучение в биатлоне
Проблемное обучение в биатлоне Пять самых известных храмов Японии
Пять самых известных храмов Японии Медицинское страхование
Медицинское страхование Умный дом
Умный дом Тема 10. Управление организационной культурой
Тема 10. Управление организационной культурой  Костюмированные шоу, как средство формирования культуры праздника
Костюмированные шоу, как средство формирования культуры праздника Система Ввода/Вывода
Система Ввода/Вывода Запам’ятовуючі пристрої СО (Заняття № 7.3)
Запам’ятовуючі пристрої СО (Заняття № 7.3) «Различные действия с дробями»
«Различные действия с дробями» Проектирование деревообрабатывающего оборудования и инструмента. Элементы узлов
Проектирование деревообрабатывающего оборудования и инструмента. Элементы узлов Электроника. Основные требования к электронным приборам
Электроника. Основные требования к электронным приборам Разноуровневое обучение Различение учащихся по уровню обучаемости в зависимости от времени, необходимого для усвоения материала
Разноуровневое обучение Различение учащихся по уровню обучаемости в зависимости от времени, необходимого для усвоения материала Мем - смешная картинка
Мем - смешная картинка Художні напрями ХХ ст.
Художні напрями ХХ ст. Презентация на тему "Педагогическая ситуация" - скачать презентации по Педагогике
Презентация на тему "Педагогическая ситуация" - скачать презентации по Педагогике Политическая социология: Эволюция основных идей в политической социологии (презентация)
Политическая социология: Эволюция основных идей в политической социологии (презентация) Гостиничное хозяйство
Гостиничное хозяйство Поддержка за пару минут makedreamprofits.ru
Поддержка за пару минут makedreamprofits.ru Русское (елизаветинское) барокко в Петербурге 1740-1760 годы
Русское (елизаветинское) барокко в Петербурге 1740-1760 годы