- РЛО Т2.1.ppt

Содержание
- 2. Методи дальнометрії. Методи вимірювання кутових координат. Методи вимірювання швидкості. Питання заняття
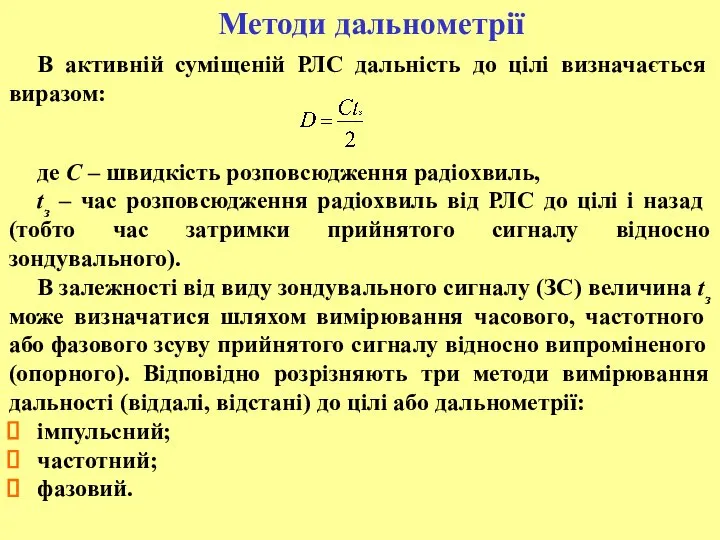
- 3. Методи дальнометрії В активній суміщеній РЛС дальність до цілі визначається виразом: де С – швидкість розповсюдження
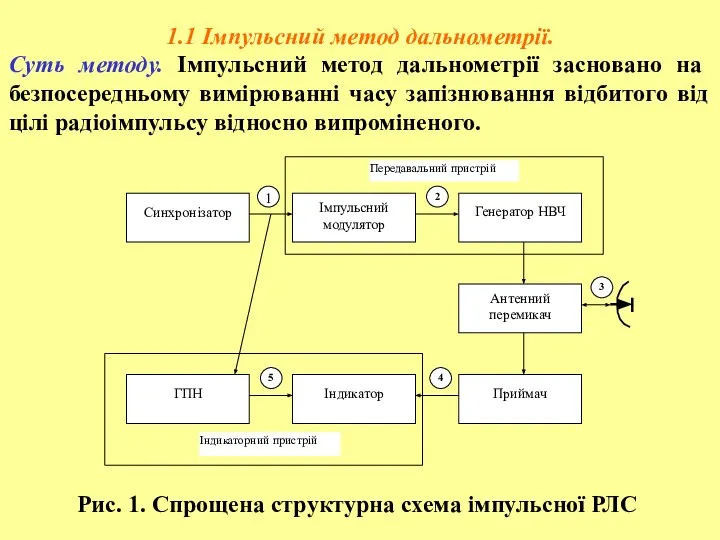
- 4. 1.1 Імпульсний метод дальнометрії. Суть методу. Імпульсний метод дальнометрії засновано на безпосередньому вимірюванні часу запізнювання відбитого
- 5. Рис. 2. Часові діаграми до структурної схеми імпульсної РЛС
- 6. Синхронізатор – забезпечує одночасний запуск передавального й індикаторного пристроїв. Виробляє короткі відеоімпульси (тривалість порядку одиниць мікросекунд)
- 7. Рис. 3. Пояснення до принципу роботи амплітудного індикатора РЛС Передавач і ГПН запускаються водночас імпульсами синхронізатора,
- 8. Індикатори з амплітудною відміткою часто називають індикаторами типу А. В РЛС кругового огляду використовують індикатори з
- 9. Частота повторення Fn зондувальних імпульсів вибирається за умов однозначного вимірювання дальності до цілі. Однозначне визначення дальності
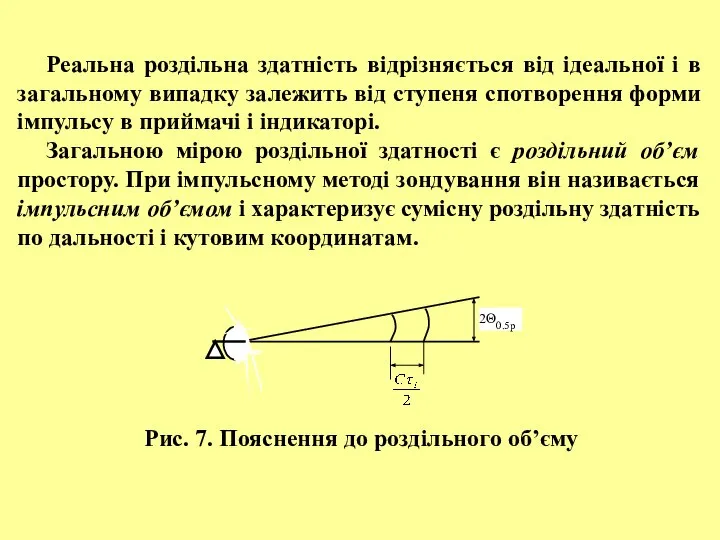
- 10. Роздільна здатність по дальності. Тривалість ЗС значно менша за період повторення цих імпульсів. Це дозволяє вимірювати
- 11. Реальна роздільна здатність відрізняється від ідеальної і в загальному випадку залежить від ступеня спотворення форми імпульсу
- 12. Переваги та недоліки методу. Переваги: 1. Випромінювання ЗС і прийом відбитого від цілі сигналу рознесенні у
- 13. Недоліки: 1. Для забезпечення великої дальності виявлення треба випромінювати велику імпульсну потужність, що обмежується можливим пробоєм
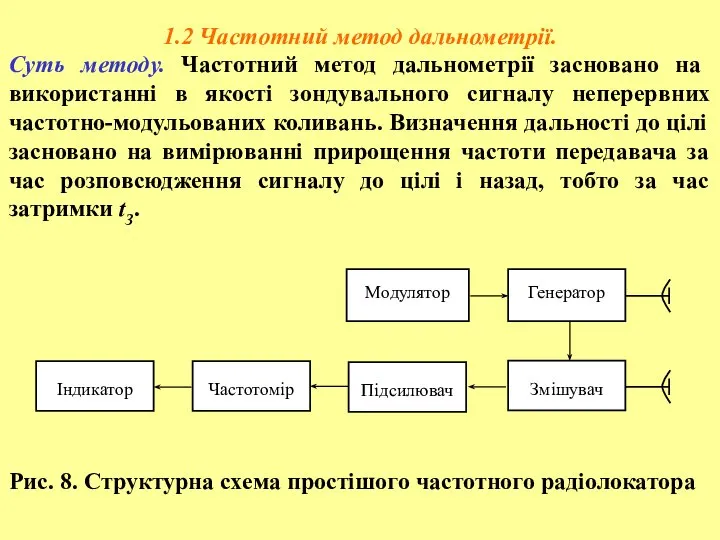
- 14. 1.2 Частотний метод дальнометрії. Суть методу. Частотний метод дальнометрії засновано на використанні в якості зондувального сигналу
- 15. При лінійному змінюванні частоти ЗС f(t)=kt, де k – крутизна модуляційної характеристики генератора. Частота прийнятого сигналу
- 16. Переваги та недоліки методу. Переваги: 1. Великі можливості щодо підвищення енергетичного потенціалу в зв’язку з використанням
- 17. 1.3. Фазовий метод дальнометрії. Суть методу. При фазовому методі дальнометрії в якості зондувального сигналу використовують неперервне
- 18. Як видно, прийняті коливання відрізняються від опорних зсувом фази φз , котрий несе інформацію про дальність
- 19. Рис. 10. Спрощена структурна схема двохчастотної фазової РЛС
- 20. Передавачі, що мають однакову потужність, працюють на близьких, але різних частотах f1 i f2. Вихідні сигнали
- 21. Різницеву частоту FP вибирають з двох протирічних умов: 1. Необхідність забезпечення однозначності відліку дальності 2. Необхідність
- 22. Переваги та недоліки методу. Переваги: 1. Великі можливості щодо збільшення енергетичного потенціалу. 2. Відсутність “мертвої зони”,
- 23. Процес вимірювання кутових координат називають радіопеленгацією. Пеленгація розв’язує задачі визначення двох координат або пеленгів цілі: азимуту
- 24. При амплітудному методі кутове положення цілі (пеленг цілі) визначають за результатом аналізу амплітуди сигналу на виході
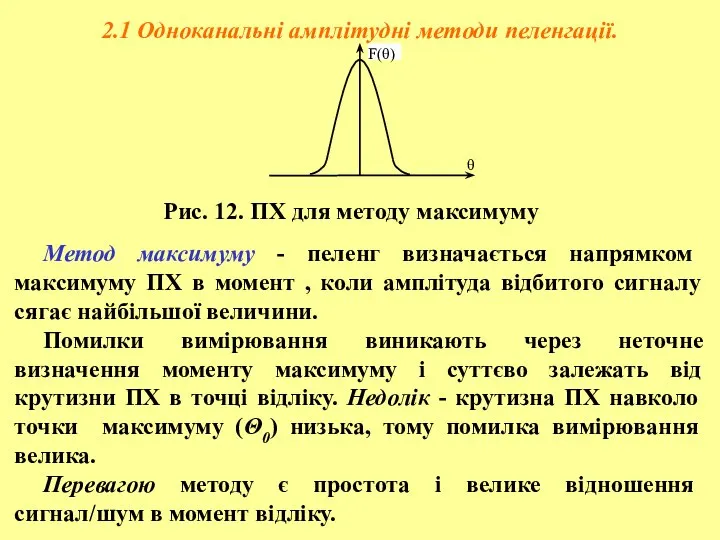
- 25. 2.1 Одноканальні амплітудні методи пеленгації. Метод максимуму - пеленг визначається напрямком максимуму ПХ в момент ,
- 26. Метод мінімуму засновано на використанні антен з пеленгаційною характеристикою , що наведена на рис.13 Рис. 13.
- 27. При методі “вилки” (порівняння) пеленг на ціль визначається як середнє двох відліків Θ1 і Θ2, котрі
- 28. Метод равносигнального напрямку – пеленг визначається, коли амплітуда сигналу відлуння в обох приймальних каналах однакова. Рис.
- 29. Рис. 16 Схема одноканального пеленгатора побудованого по рівносигнальному методу Основним недоліком одноканальних пеленгаторів є те, що
- 30. 2.2 Багатоканальні (моноімпульсні) амплітудні методи пеленгації. В багатоканальних пеленгаторах пеленг цілі визначається по результатам порівняння водночас
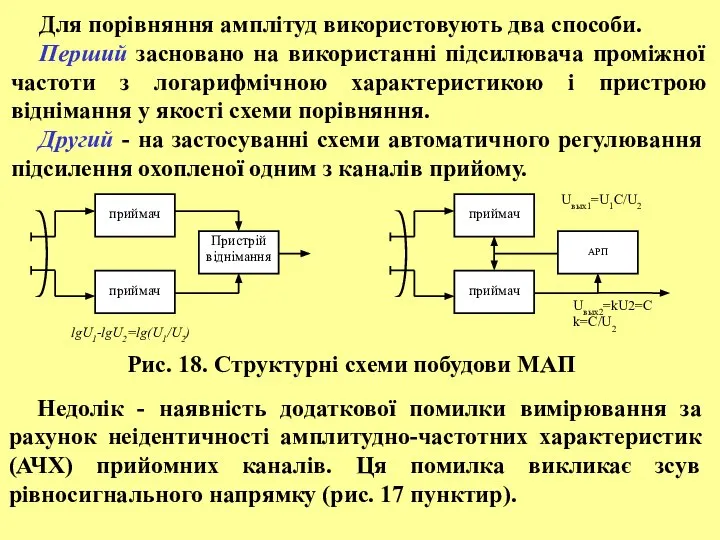
- 31. Для порівняння амплітуд використовують два способи. Перший засновано на використанні підсилювача проміжної частоти з логарифмічною характеристикою
- 32. Рис. 19. Структурна схема МАП з сумарно-різніцевою обробкою сигналів Рис. 20. ДН і сумарно-різніцева її характеристика
- 33. Рис. 21. ПХ сумарно-різніцевого МАП Нестабільність АЧХ каналів не приводить до зсуву РСН (рис.21 пунктир). Помилка
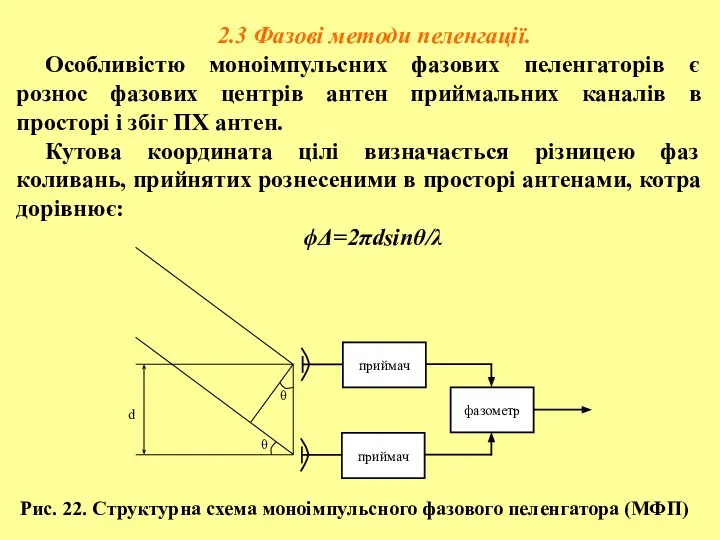
- 34. 2.3 Фазові методи пеленгації. Особливістю моноімпульсних фазових пеленгаторів є рознос фазових центрів антен приймальних каналів в
- 35. Для однозначного визначення кутового відхилення необхідно, щоб відстань d між фазовими центрами антен дорівнювала розкриву антени.
- 37. Скачать презентацию
Методи дальнометрії.
Методи вимірювання кутових координат.
Методи вимірювання швидкості.
Питання заняття
Методи дальнометрії.
Методи вимірювання кутових координат.
Методи вимірювання швидкості.
Питання заняття
Методи дальнометрії
В активній суміщеній РЛС дальність до цілі визначається виразом:
де С
Методи дальнометрії
В активній суміщеній РЛС дальність до цілі визначається виразом:
де С
1.1 Імпульсний метод дальнометрії.
Суть методу. Імпульсний метод дальнометрії засновано на безпосередньому
1.1 Імпульсний метод дальнометрії.
Суть методу. Імпульсний метод дальнометрії засновано на безпосередньому
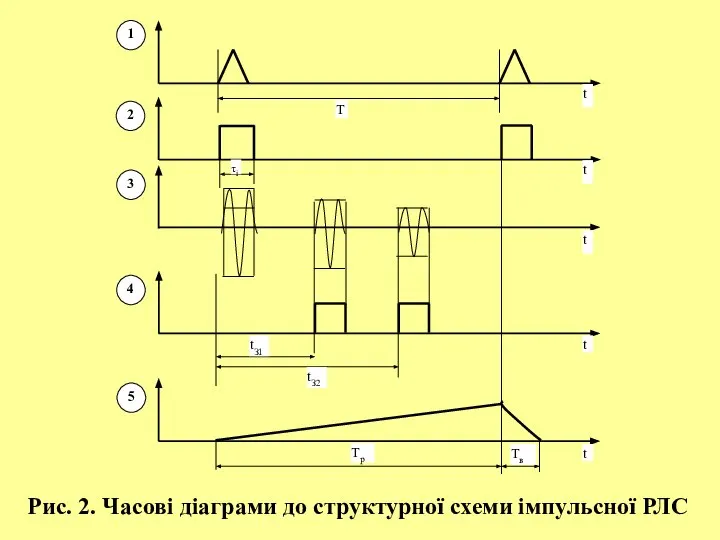
Рис. 2. Часові діаграми до структурної схеми імпульсної РЛС
Рис. 2. Часові діаграми до структурної схеми імпульсної РЛС
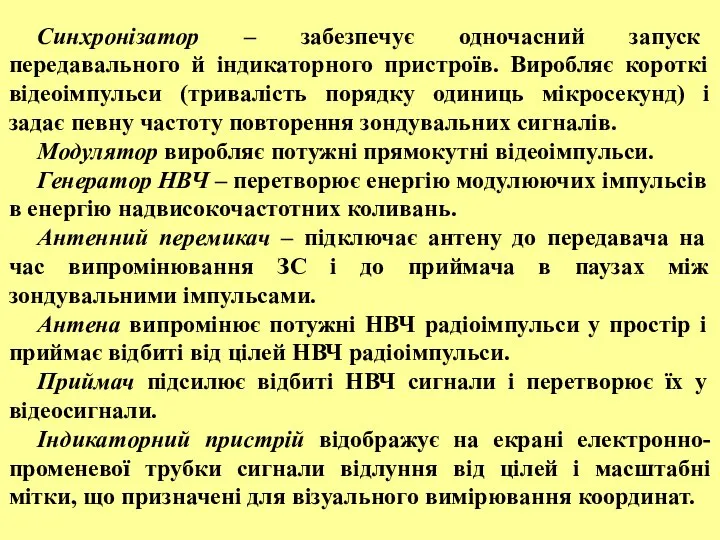
Синхронізатор – забезпечує одночасний запуск передавального й індикаторного пристроїв. Виробляє короткі
Синхронізатор – забезпечує одночасний запуск передавального й індикаторного пристроїв. Виробляє короткі

Рис. 3. Пояснення до принципу роботи амплітудного індикатора РЛС
Передавач і
Рис. 3. Пояснення до принципу роботи амплітудного індикатора РЛС
Передавач і
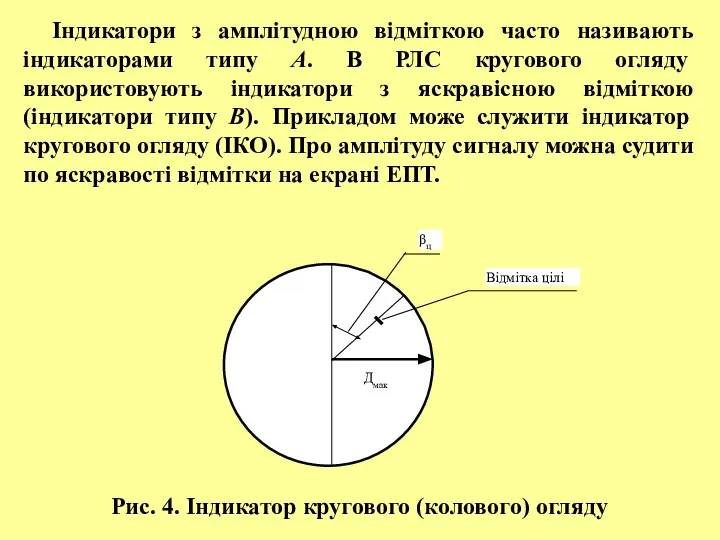
Індикатори з амплітудною відміткою часто називають індикаторами типу А. В РЛС
Індикатори з амплітудною відміткою часто називають індикаторами типу А. В РЛС
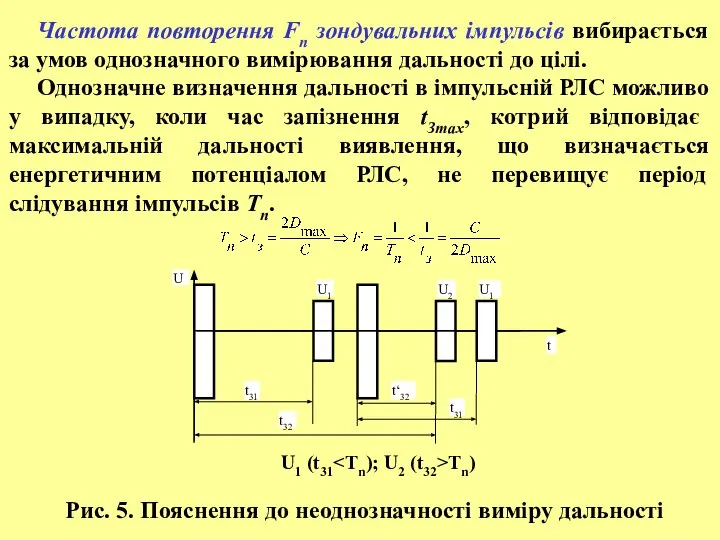
Частота повторення Fn зондувальних імпульсів вибирається за умов однозначного вимірювання дальності
Частота повторення Fn зондувальних імпульсів вибирається за умов однозначного вимірювання дальності
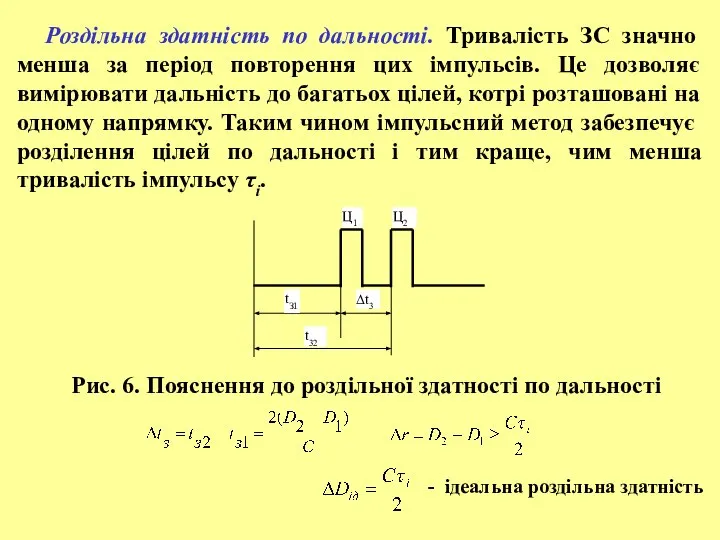
Роздільна здатність по дальності. Тривалість ЗС значно менша за період повторення
Роздільна здатність по дальності. Тривалість ЗС значно менша за період повторення
Реальна роздільна здатність відрізняється від ідеальної і в загальному випадку залежить
Реальна роздільна здатність відрізняється від ідеальної і в загальному випадку залежить
Переваги та недоліки методу.
Переваги: 1. Випромінювання ЗС і прийом відбитого від
Переваги та недоліки методу.
Переваги: 1. Випромінювання ЗС і прийом відбитого від
Недоліки: 1. Для забезпечення великої дальності виявлення треба випромінювати велику імпульсну
Недоліки: 1. Для забезпечення великої дальності виявлення треба випромінювати велику імпульсну
1.2 Частотний метод дальнометрії.
Суть методу. Частотний метод дальнометрії засновано на
1.2 Частотний метод дальнометрії.
Суть методу. Частотний метод дальнометрії засновано на
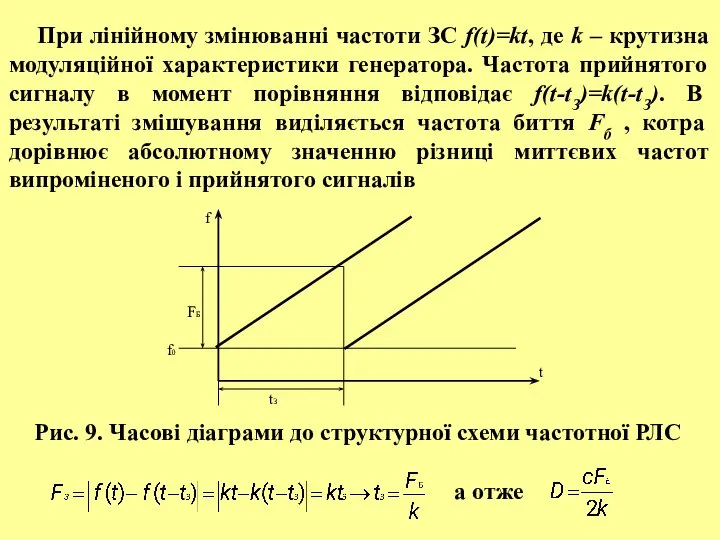
При лінійному змінюванні частоти ЗС f(t)=kt, де k – крутизна модуляційної
При лінійному змінюванні частоти ЗС f(t)=kt, де k – крутизна модуляційної
Переваги та недоліки методу.
Переваги: 1. Великі можливості щодо підвищення енергетичного потенціалу
Переваги та недоліки методу.
Переваги: 1. Великі можливості щодо підвищення енергетичного потенціалу
1.3. Фазовий метод дальнометрії.
Суть методу. При фазовому методі дальнометрії в якості
1.3. Фазовий метод дальнометрії.
Суть методу. При фазовому методі дальнометрії в якості
Як видно, прийняті коливання відрізняються від опорних зсувом фази φз ,
Як видно, прийняті коливання відрізняються від опорних зсувом фази φз ,
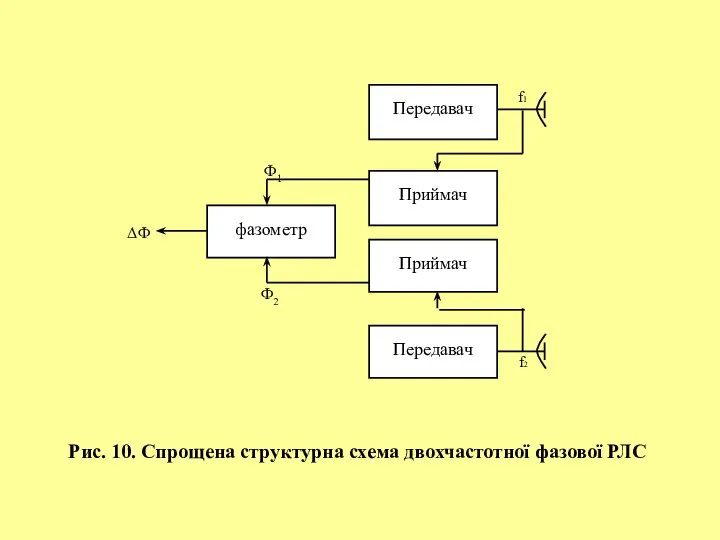
Рис. 10. Спрощена структурна схема двохчастотної фазової РЛС
Рис. 10. Спрощена структурна схема двохчастотної фазової РЛС
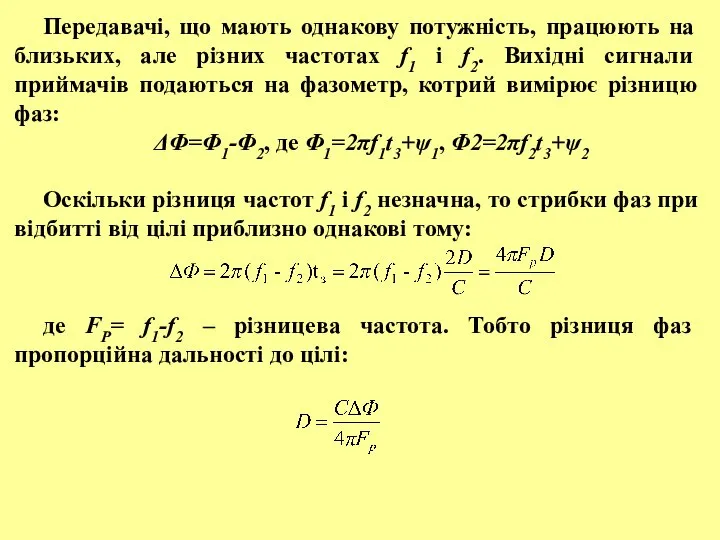
Передавачі, що мають однакову потужність, працюють на близьких, але різних частотах
Передавачі, що мають однакову потужність, працюють на близьких, але різних частотах
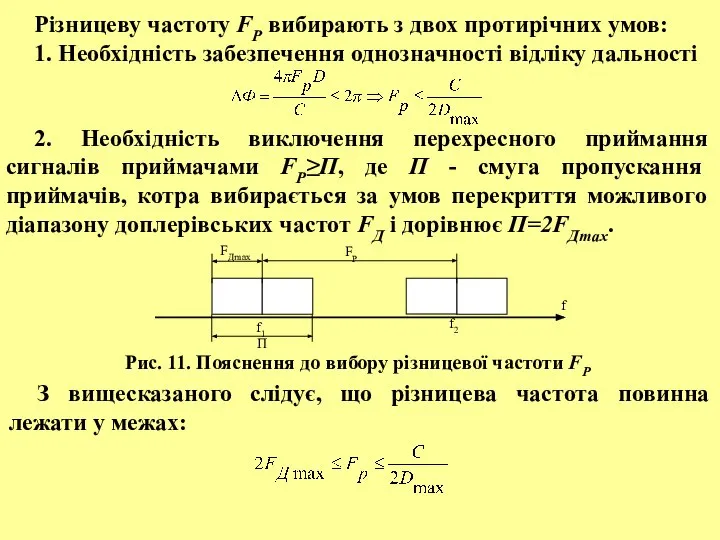
Різницеву частоту FP вибирають з двох протирічних умов:
1. Необхідність забезпечення однозначності
Різницеву частоту FP вибирають з двох протирічних умов:
1. Необхідність забезпечення однозначності
Переваги та недоліки методу.
Переваги: 1. Великі можливості щодо збільшення енергетичного потенціалу.
2.
Переваги та недоліки методу.
Переваги: 1. Великі можливості щодо збільшення енергетичного потенціалу.
2.
Процес вимірювання кутових координат називають радіопеленгацією. Пеленгація розв’язує задачі визначення двох
Процес вимірювання кутових координат називають радіопеленгацією. Пеленгація розв’язує задачі визначення двох
При амплітудному методі кутове положення цілі (пеленг цілі) визначають за результатом
При амплітудному методі кутове положення цілі (пеленг цілі) визначають за результатом
2.1 Одноканальні амплітудні методи пеленгації.
Метод максимуму - пеленг визначається напрямком
2.1 Одноканальні амплітудні методи пеленгації.
Метод максимуму - пеленг визначається напрямком
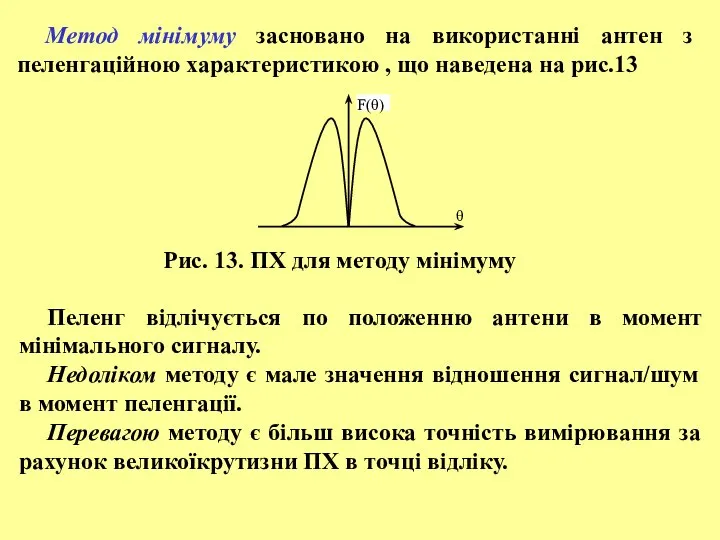
Метод мінімуму засновано на використанні антен з пеленгаційною характеристикою , що
Метод мінімуму засновано на використанні антен з пеленгаційною характеристикою , що
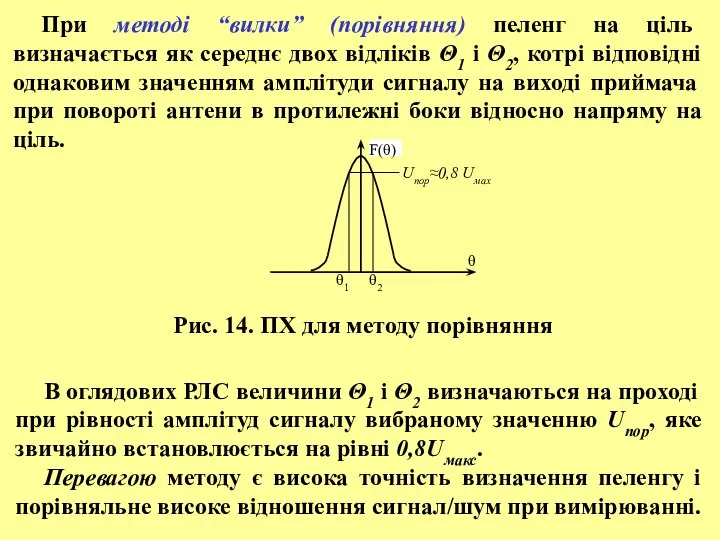
При методі “вилки” (порівняння) пеленг на ціль визначається як середнє двох
При методі “вилки” (порівняння) пеленг на ціль визначається як середнє двох
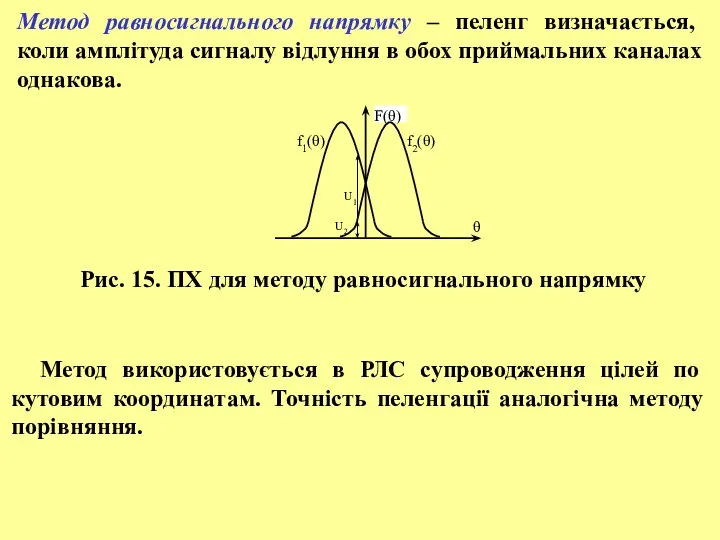
Метод равносигнального напрямку – пеленг визначається, коли амплітуда сигналу відлуння в
Метод равносигнального напрямку – пеленг визначається, коли амплітуда сигналу відлуння в
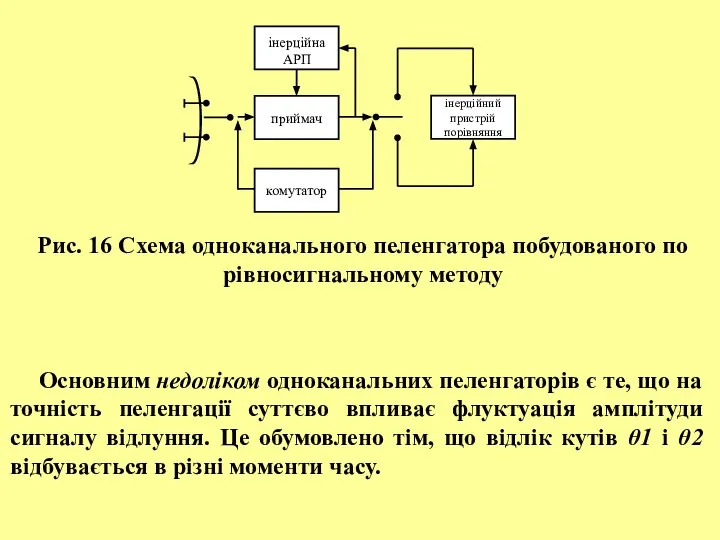
Рис. 16 Схема одноканального пеленгатора побудованого по рівносигнальному методу
Основним недоліком одноканальних
Рис. 16 Схема одноканального пеленгатора побудованого по рівносигнальному методу
Основним недоліком одноканальних
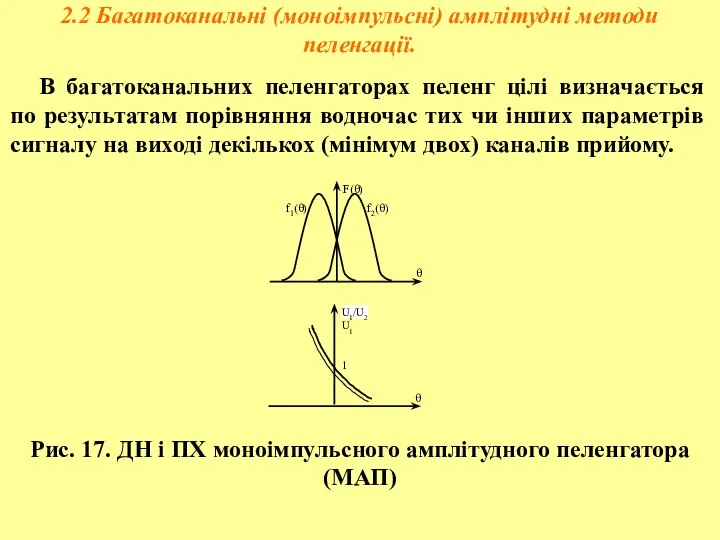
2.2 Багатоканальні (моноімпульсні) амплітудні методи пеленгації.
В багатоканальних пеленгаторах пеленг цілі
2.2 Багатоканальні (моноімпульсні) амплітудні методи пеленгації.
В багатоканальних пеленгаторах пеленг цілі
Для порівняння амплітуд використовують два способи.
Перший засновано на використанні підсилювача проміжної
Для порівняння амплітуд використовують два способи.
Перший засновано на використанні підсилювача проміжної
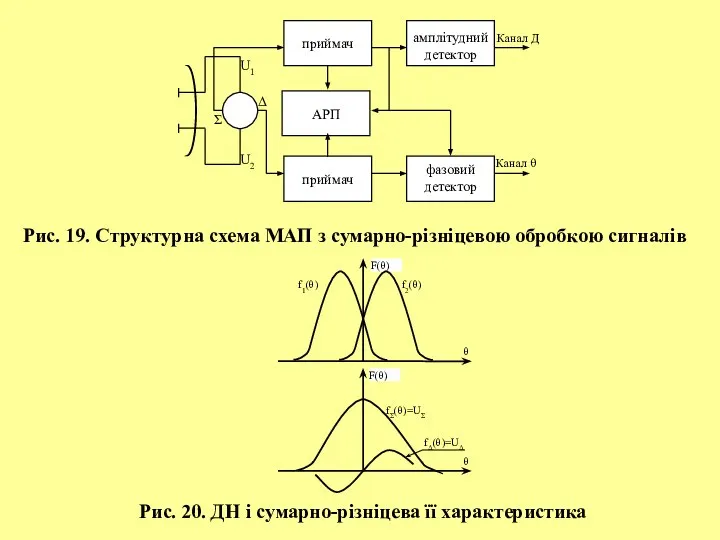
Рис. 19. Структурна схема МАП з сумарно-різніцевою обробкою сигналів
Рис. 20.
Рис. 19. Структурна схема МАП з сумарно-різніцевою обробкою сигналів
Рис. 20.
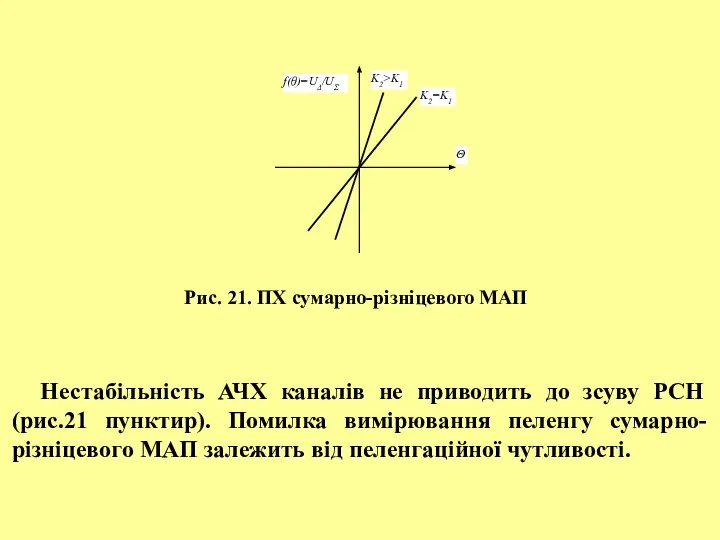
Рис. 21. ПХ сумарно-різніцевого МАП
Нестабільність АЧХ каналів не приводить до
Рис. 21. ПХ сумарно-різніцевого МАП
Нестабільність АЧХ каналів не приводить до
2.3 Фазові методи пеленгації.
Особливістю моноімпульсних фазових пеленгаторів є рознос фазових центрів
2.3 Фазові методи пеленгації.
Особливістю моноімпульсних фазових пеленгаторів є рознос фазових центрів
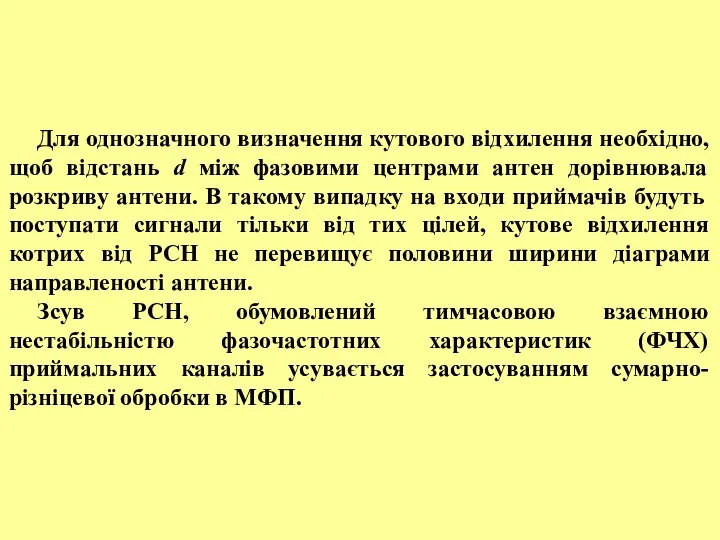
Для однозначного визначення кутового відхилення необхідно, щоб відстань d між фазовими
Для однозначного визначення кутового відхилення необхідно, щоб відстань d між фазовими
 2018 FIFA World Cup Russia
2018 FIFA World Cup Russia СИСТЕМА АККРЕДИТАЦИИ РЕСПУБЛИКИ БЕЛАРУСЬ
СИСТЕМА АККРЕДИТАЦИИ РЕСПУБЛИКИ БЕЛАРУСЬ Экономика и особенности деятельности отраслей культуры
Экономика и особенности деятельности отраслей культуры Презентация Сущность организации, их типология, организация
Презентация Сущность организации, их типология, организация Основи будови військових засобів вимірювань. Засоби вимірювань
Основи будови військових засобів вимірювань. Засоби вимірювань Минимум, максимум, разница и сумма
Минимум, максимум, разница и сумма Презентация "Доходы и расходы семьи. Стоимость жизни" - скачать презентации по Экономике
Презентация "Доходы и расходы семьи. Стоимость жизни" - скачать презентации по Экономике Информационные технологии в экономике Презентацию подготовил студент группы Э-14-2 Лутов Олег
Информационные технологии в экономике Презентацию подготовил студент группы Э-14-2 Лутов Олег Un chatton
Un chatton Подпрограммы. Определение функции, фактические и формальные параметры функции
Подпрограммы. Определение функции, фактические и формальные параметры функции Презентация
Презентация  Средняя общеобразовательная школа 10 с углубленным изучением отдельных предметов г. Марганец, 2011 год. Презентация опыта работы учи
Средняя общеобразовательная школа 10 с углубленным изучением отдельных предметов г. Марганец, 2011 год. Презентация опыта работы учи Структура спортивно-педагогической деятельности
Структура спортивно-педагогической деятельности Физиологическая классификация и характеристика физических упражнений
Физиологическая классификация и характеристика физических упражнений Темы про Пететрбург и Москву
Темы про Пететрбург и Москву Бизнес Сервис Центр Харьков. Инструкция по выставлению осуществленных рейсов ТЭК на оплату (блок документы)
Бизнес Сервис Центр Харьков. Инструкция по выставлению осуществленных рейсов ТЭК на оплату (блок документы) 2 класс СЛОВАРНЫЕ СЛОВА Г, Д, З УМК «Школа России» Выполнила: Олифиренко Елена Александровна, учитель начальных классов МОУ-СО
2 класс СЛОВАРНЫЕ СЛОВА Г, Д, З УМК «Школа России» Выполнила: Олифиренко Елена Александровна, учитель начальных классов МОУ-СО Социальная инженерия
Социальная инженерия Презентация на тему "Использование информационно-коммуникационных технологий в начальной школе" - скачать презентации по Пе
Презентация на тему "Использование информационно-коммуникационных технологий в начальной школе" - скачать презентации по Пе Презентация Диалектика как учение о развитии
Презентация Диалектика как учение о развитии Barranquismo
Barranquismo Открытия. Деловой стиль в одежде
Открытия. Деловой стиль в одежде Малярные работы и контроль качества малярных работ
Малярные работы и контроль качества малярных работ Система процессов деятельности таможни
Система процессов деятельности таможни  Поклонение и Субботняя школа. Качество служений
Поклонение и Субботняя школа. Качество служений Los juegos olimpicos de rio 2016
Los juegos olimpicos de rio 2016 Социология и политология как науки
Социология и политология как науки Перспективы использования идентификационных номеров и защитных знаков
Перспективы использования идентификационных номеров и защитных знаков