- Робототехнический комплекс для демонстрации русских дактильных жестов

Содержание
- 2. Русская дактильная азбука — вспомогательная система русского жестового языка, в которой каждому жесту одной руки соответствует
- 3. Исследования и разработки работы могут быть применены в инновационных системах коммуникативного взаимодействия в человекомашинной среде с
- 5. ПЕЧАТЬ ДЕТАЛЕЙ ABS -пластик PICASO 3D Designer
- 6. ПОДГОТОВКА ДЕТАЛЕЙ К СБОРКЕ Сверла 2 и 3 мм Наждачная бумага P180 (P 220) Рекомендуемый диаметр
- 7. ПОДГОТОВКА АППАРАТНОЙ ЧАСТИ Контактная макетная плата Arduino UNO R3 Cервопривод FT5519M Рабочий ход: 120° Вес: 56
- 8. СБОРКА АППАРАТНОЙ ЧАСТИ
- 9. РЕАЛИЗАЦИЯ ПРОГРАММНОЙ ЧАСТИ #include #include Необходимые дополнительные библиотеки։ if (symbol == ‘0’) // возврат в начальное
- 11. Скачать презентацию
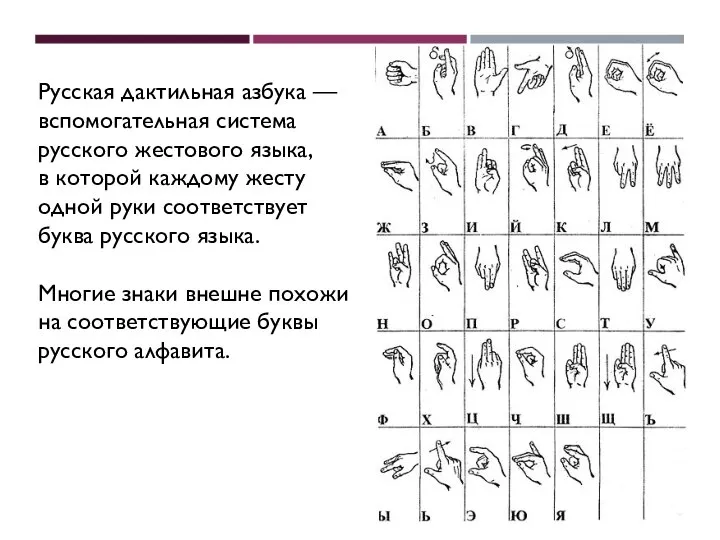
Русская дактильная азбука — вспомогательная система русского жестового языка,
в которой
Русская дактильная азбука — вспомогательная система русского жестового языка,
в которой
Исследования и разработки работы могут быть применены в инновационных системах коммуникативного
Исследования и разработки работы могут быть применены в инновационных системах коммуникативного

ПЕЧАТЬ ДЕТАЛЕЙ
ABS -пластик
PICASO 3D Designer
ПЕЧАТЬ ДЕТАЛЕЙ
ABS -пластик
PICASO 3D Designer

ПОДГОТОВКА ДЕТАЛЕЙ К СБОРКЕ
Сверла
2 и 3 мм
Наждачная бумага
P180 (P 220)
ПОДГОТОВКА ДЕТАЛЕЙ К СБОРКЕ
Сверла
2 и 3 мм
Наждачная бумага
P180 (P 220)

ПОДГОТОВКА АППАРАТНОЙ ЧАСТИ
Контактная макетная плата
Arduino UNO R3
Cервопривод FT5519M
Рабочий ход: 120°
Вес: 56
ПОДГОТОВКА АППАРАТНОЙ ЧАСТИ
Контактная макетная плата
Arduino UNO R3
Cервопривод FT5519M
Рабочий ход: 120°
Вес: 56
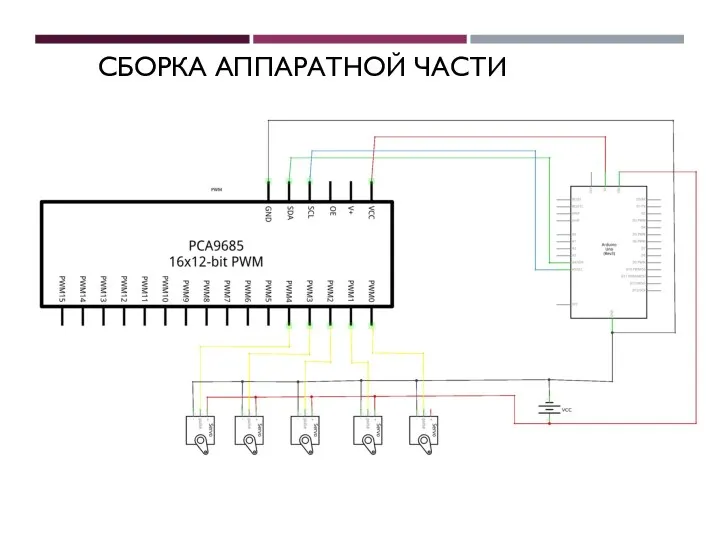
СБОРКА АППАРАТНОЙ ЧАСТИ
СБОРКА АППАРАТНОЙ ЧАСТИ
РЕАЛИЗАЦИЯ ПРОГРАММНОЙ ЧАСТИ
#include
#include
Необходимые дополнительные библиотеки։
if (symbol == ‘0’) //
РЕАЛИЗАЦИЯ ПРОГРАММНОЙ ЧАСТИ
#include Необходимые дополнительные библиотеки։ if (symbol == ‘0’) //
#include
 Прогнозирование остаточного ресурса объекта
Прогнозирование остаточного ресурса объекта Динамические и статические страницы. Лекция 1
Динамические и статические страницы. Лекция 1 Hardware printer
Hardware printer Презентация Пути совершенствования мотивации трудовой деятельности в таможенных органах
Презентация Пути совершенствования мотивации трудовой деятельности в таможенных органах Зимушка -зима
Зимушка -зима  Interesting facts about Scotland
Interesting facts about Scotland Сокращение алгебраических дробей - презентация по Алгебре
Сокращение алгебраических дробей - презентация по Алгебре Акробатические упражнения по «Комплексной программе физического воспитания для учащихся 1-11 классов». Методика обучения
Акробатические упражнения по «Комплексной программе физического воспитания для учащихся 1-11 классов». Методика обучения RedeX Plus - Your New Pace of Life
RedeX Plus - Your New Pace of Life Вормсский махзор
Вормсский махзор ПОДГОТОВИЛА ПРЕПОДАВАТЕЛЬ ПМ 04,05 АЗАРЦОВА А.М. ПОТРЕБНОСТИ ПАЦИЕНТА В СНЕ И ОТДЫХЕ
ПОДГОТОВИЛА ПРЕПОДАВАТЕЛЬ ПМ 04,05 АЗАРЦОВА А.М. ПОТРЕБНОСТИ ПАЦИЕНТА В СНЕ И ОТДЫХЕ Анализ установившихся и переходных режимов в системе электроснабжения 220/110 кВ
Анализ установившихся и переходных режимов в системе электроснабжения 220/110 кВ Основные источники современного российского конституционного права, их соотношение с источниками налогового права. Тема 2
Основные источники современного российского конституционного права, их соотношение с источниками налогового права. Тема 2 Частотно-керовані електроприводи змінного струму
Частотно-керовані електроприводи змінного струму Искусственные нейронные сети. Лекция 15-16
Искусственные нейронные сети. Лекция 15-16 Информационные технологии в электроэнергетике. SCADA-системы (Часть 3)
Информационные технологии в электроэнергетике. SCADA-системы (Часть 3) Технологическая карта урока как основа проектирования урока Если мы хотим достигнуть какой-нибудь цели воспитанием, то должны п
Технологическая карта урока как основа проектирования урока Если мы хотим достигнуть какой-нибудь цели воспитанием, то должны п Презентация на тему: Инжиниринг Выполнил: ученик 11а класса Журавлев Данил
Презентация на тему: Инжиниринг Выполнил: ученик 11а класса Журавлев Данил  Анализ видов, последствий и причин потенциальных несоответствий
Анализ видов, последствий и причин потенциальных несоответствий Задачи с использованием циклов
Задачи с использованием циклов Режимы работы электродвигателей
Режимы работы электродвигателей Схемы отвода конденсата греющего пара в регенеративных подогревателях поверхностного типа. Лекция 4
Схемы отвода конденсата греющего пара в регенеративных подогревателях поверхностного типа. Лекция 4 Химическая термодинамика: теоретическая основа биоэнергетики
Химическая термодинамика: теоретическая основа биоэнергетики Физиотерапевтические средства: дозирование, ошибки назначения, рецептура к.м.н., с.н.с. Жук Д.Д.
Физиотерапевтические средства: дозирование, ошибки назначения, рецептура к.м.н., с.н.с. Жук Д.Д.  Аналитик. Бизнес-аналитик
Аналитик. Бизнес-аналитик Актуальные проблемы физического воспитания в современных условиях образования
Актуальные проблемы физического воспитания в современных условиях образования Новелла первая Петрарка и Лаура
Новелла первая Петрарка и Лаура Non-State. Definition
Non-State. Definition