- Робототехника

Содержание
- 2. Стоимость производства 1 робота не превышает 1 миллиона долларов Умения Ходить по лестнице Распознавание движущихся объектов
- 3. Датчик на бампере позволяет регистрировать удары о стены и мебель, «виртуальную стену» и ограничить с помощью
- 4. 100 голосовых команд SIFT-детектор для зрительной системы Самообучение Проявление эмоций AIBO ERS-7M3 (2005)
- 5. DARPA Grand Challenge Volkswagen Google Университет Пармы BMW Оборудование Видеокамеры Лидары Серверные системы Автомобили-роботы
- 6. 2004 – пустыня Мохаве, ни один из 13 роботов не доехал до финиша 2005 – пустыня
- 7. Университет Пармы 4 автомобиля-робота из Пармы в Шанхай Июль-октябрь 2010 VisLab Intercontinental Autonomous Challenge
- 8. Информация в управляющий блок поступает из нескольких источников: от видеокамеры, системы контроля за непроизвольным пересечением сплошной
- 10. Google Свободный университет Берлина для Volkswagen Другие разработки
- 11. 7 команд Селигер Заранее заданный маршрут и стратегия его прохождения Робокросс-2010
- 12. Volkswagen (Park Assist) BMW 750i Toyota Prius (IPAS) Lexus LS (IPAS) Системы автоматической парковки
- 13. Различные датчики – лидары, видеокамеры, кренометры, GPS Система распознавания дорожной ситуации Система контроля пути Управляющие механизмы
- 14. Лидары - активные дальномеры на основе лазера инфракрасного диапазона, строят трехмерное облако точек Видеокамеры дают плотный
- 15. Провести анализ сцены Построение модели поведения объектов сцены и предсказание дорожной ситуации Формирование стратегии прохождения маршрута
- 16. На базе Volkswagen Passat Junior Стэндфордского университета
- 17. Позиционирование и ориентация - система реального времени Applanix POS LV 420, интегрированная с несколькими 2-частотными GPS-приёмниками,
- 18. лидар Velodyne HD, сканирование в круговой плоскости со скоростью 15 раз в секунду, сочетание 64 отдельных
- 19. стоечные серверные системы, оснащённые новейшими двух- и четырёхъядерными процессорами Intel Core2 Duo и Intel Core2 Quad,
- 20. RDS основана на библиотеке CCR (Concurrency and Coordination Runtime), .NET-реализации библиотеки для работы с параллельными и
- 21. Aldebaran Robotics Nao CoroWare CoroBot Lego Mindstorms NXT iRobot Create KUKA Robotics Parallax Boe-Bot Robosoft’s robots
- 23. Скачать презентацию
Стоимость производства 1 робота не превышает 1 миллиона долларов
Умения
Ходить по лестнице
Распознавание
Стоимость производства 1 робота не превышает 1 миллиона долларов
Умения
Ходить по лестнице
Распознавание
Датчик на бампере позволяет регистрировать удары о стены и мебель, «виртуальную
Датчик на бампере позволяет регистрировать удары о стены и мебель, «виртуальную

100 голосовых команд
SIFT-детектор для зрительной системы
Самообучение
Проявление эмоций
AIBO ERS-7M3 (2005)
100 голосовых команд
SIFT-детектор для зрительной системы
Самообучение
Проявление эмоций
AIBO ERS-7M3 (2005)
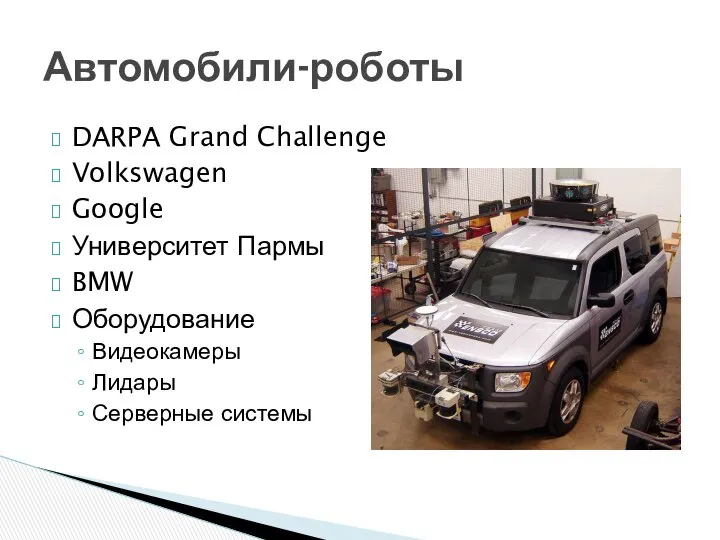
DARPA Grand Challenge
Volkswagen
Google
Университет Пармы
BMW
Оборудование
Видеокамеры
Лидары
Серверные системы
Автомобили-роботы
DARPA Grand Challenge
Volkswagen
Google
Университет Пармы
BMW
Оборудование
Видеокамеры
Лидары
Серверные системы
Автомобили-роботы
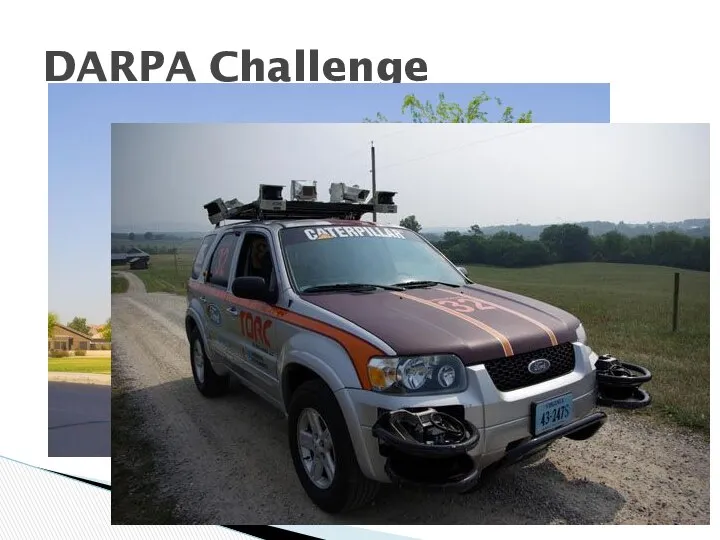
2004 – пустыня Мохаве, ни один из 13 роботов не доехал
2004 – пустыня Мохаве, ни один из 13 роботов не доехал

Университет Пармы
4 автомобиля-робота из Пармы в Шанхай
Июль-октябрь 2010
VisLab Intercontinental Autonomous Challenge
Университет Пармы
4 автомобиля-робота из Пармы в Шанхай
Июль-октябрь 2010
VisLab Intercontinental Autonomous Challenge
Информация в управляющий блок поступает из нескольких источников: от видеокамеры, системы
Информация в управляющий блок поступает из нескольких источников: от видеокамеры, системы

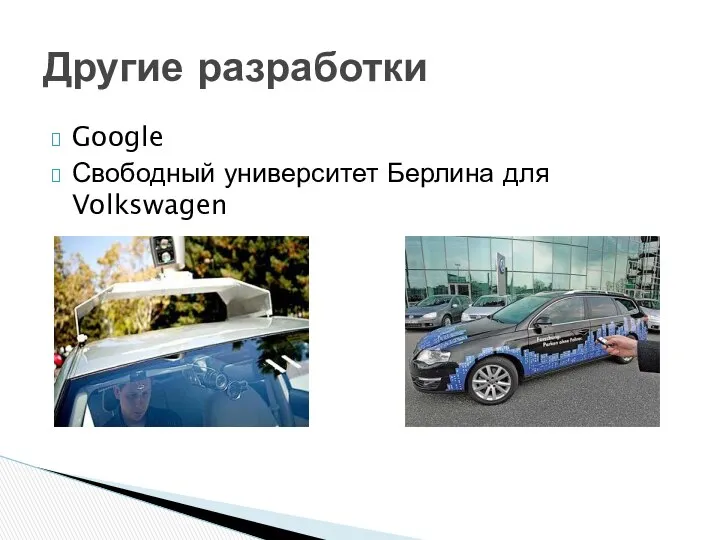
Google
Свободный университет Берлина для Volkswagen
Другие разработки
Google
Свободный университет Берлина для Volkswagen
Другие разработки
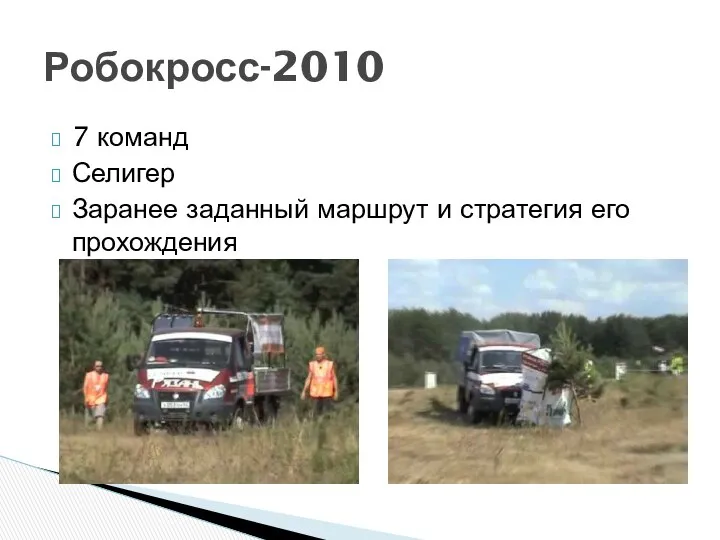
7 команд
Селигер
Заранее заданный маршрут и стратегия его прохождения
Робокросс-2010
7 команд
Селигер
Заранее заданный маршрут и стратегия его прохождения
Робокросс-2010

Volkswagen (Park Assist)
BMW 750i
Toyota Prius (IPAS)
Lexus LS (IPAS)
Системы автоматической парковки
Volkswagen (Park Assist)
BMW 750i
Toyota Prius (IPAS)
Lexus LS (IPAS)
Системы автоматической парковки
Различные датчики – лидары, видеокамеры, кренометры, GPS
Система распознавания дорожной ситуации
Система контроля
Различные датчики – лидары, видеокамеры, кренометры, GPS
Система распознавания дорожной ситуации
Система контроля
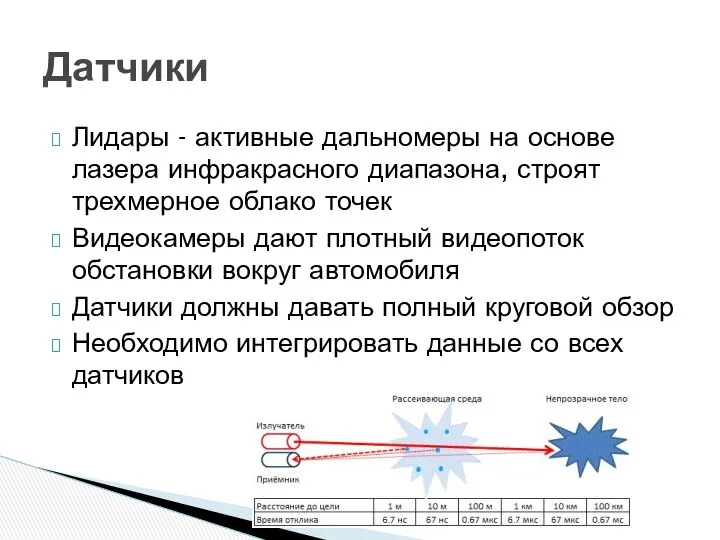
Лидары - активные дальномеры на основе лазера инфракрасного диапазона, строят трехмерное
Лидары - активные дальномеры на основе лазера инфракрасного диапазона, строят трехмерное

Провести анализ сцены
Построение модели поведения объектов сцены и предсказание дорожной ситуации
Формирование
Провести анализ сцены
Построение модели поведения объектов сцены и предсказание дорожной ситуации
Формирование

На базе Volkswagen Passat
Junior Стэндфордского университета
На базе Volkswagen Passat
Junior Стэндфордского университета
Позиционирование и ориентация - система реального времени Applanix POS LV 420,
Позиционирование и ориентация - система реального времени Applanix POS LV 420,
лидар Velodyne HD, сканирование в круговой плоскости со скоростью 15 раз
лидар Velodyne HD, сканирование в круговой плоскости со скоростью 15 раз
стоечные серверные системы, оснащённые новейшими двух- и четырёхъядерными процессорами Intel Core2
стоечные серверные системы, оснащённые новейшими двух- и четырёхъядерными процессорами Intel Core2
RDS основана на библиотеке CCR (Concurrency and Coordination Runtime), .NET-реализации библиотеки
RDS основана на библиотеке CCR (Concurrency and Coordination Runtime), .NET-реализации библиотеки
Aldebaran Robotics Nao
CoroWare CoroBot
Lego Mindstorms NXT
iRobot Create
KUKA Robotics
Parallax Boe-Bot
Robosoft’s robots
Parallax Scribbler.
Aldebaran Robotics Nao
CoroWare CoroBot
Lego Mindstorms NXT
iRobot Create
KUKA Robotics
Parallax Boe-Bot
Robosoft’s robots
Parallax Scribbler.
 Оказание государственных услуг в области промышленной безопасности РГУ Департамента КИРПБ МИР РК
Оказание государственных услуг в области промышленной безопасности РГУ Департамента КИРПБ МИР РК Поведение фирмы на рынке совершенной конкуренции в краткосрочном периоде
Поведение фирмы на рынке совершенной конкуренции в краткосрочном периоде Методы монтажа конструкций зданий и сооружений
Методы монтажа конструкций зданий и сооружений Информационная модель ЛДП
Информационная модель ЛДП Проецирование. Тест
Проецирование. Тест Презентация Классификация овощей
Презентация Классификация овощей  ООП 2. Класс и Объект
ООП 2. Класс и Объект Презентация Я-концепция и самосознание личности
Презентация Я-концепция и самосознание личности  Методика обоснования управленческих решений на основе маржинального анализа
Методика обоснования управленческих решений на основе маржинального анализа Муниципальное бюджетное общеобразовательное учреждение «Средняя общеобразовательная школа №15 п. Березайка» «Гармония жилья с
Муниципальное бюджетное общеобразовательное учреждение «Средняя общеобразовательная школа №15 п. Березайка» «Гармония жилья с  Наркоз
Наркоз Понятие консалтинга в области информационных технологий
Понятие консалтинга в области информационных технологий  Презентация "Оп-арт" - скачать презентации по МХК
Презентация "Оп-арт" - скачать презентации по МХК Леонардо да Винчи
Леонардо да Винчи Выполнили: Мельников Дмитрий, 204 группа Хмель Дмитрий, 203 группа
Выполнили: Мельников Дмитрий, 204 группа Хмель Дмитрий, 203 группа Зовнішньоекономічна діяльність підприємства
Зовнішньоекономічна діяльність підприємства План для свай
План для свай Электронные ресурсы в работе учителя математики
Электронные ресурсы в работе учителя математики Шаблон проекта
Шаблон проекта Таможня
Таможня Презентация Культура эпохи Возрождения
Презентация Культура эпохи Возрождения Антибактериальные химиотерапевтические средства. Принципы химиотерапии. Антибиотики.
Антибактериальные химиотерапевтические средства. Принципы химиотерапии. Антибиотики. Пасха. День чудесного воскресения Иисуса Христа
Пасха. День чудесного воскресения Иисуса Христа Развитие внимания на уроках - презентация для начальной школы_
Развитие внимания на уроках - презентация для начальной школы_ Промышленный шпионаж
Промышленный шпионаж Техника рисования быстрых рисунков - скетчинг
Техника рисования быстрых рисунков - скетчинг PHP #1.1. Введение. Быстрый старт
PHP #1.1. Введение. Быстрый старт Как принимать платежи Яндекс.Деньгами без подключения? Инструменты. Финансовые схемы. Примеры.
Как принимать платежи Яндекс.Деньгами без подключения? Инструменты. Финансовые схемы. Примеры.