- Т14 РТС УР.ppt

Содержание
- 2. * Загальні відомості про радіотехнічні системи управління ракетами. Радіолокаційні системи самонаведення ракет. Системи командного радіоуправління. Радіопідірвачі.
- 3. Контрольні завдання (РТС УР) При яких умовах наведення ракети на ціль прямим методом буде з мінімальним
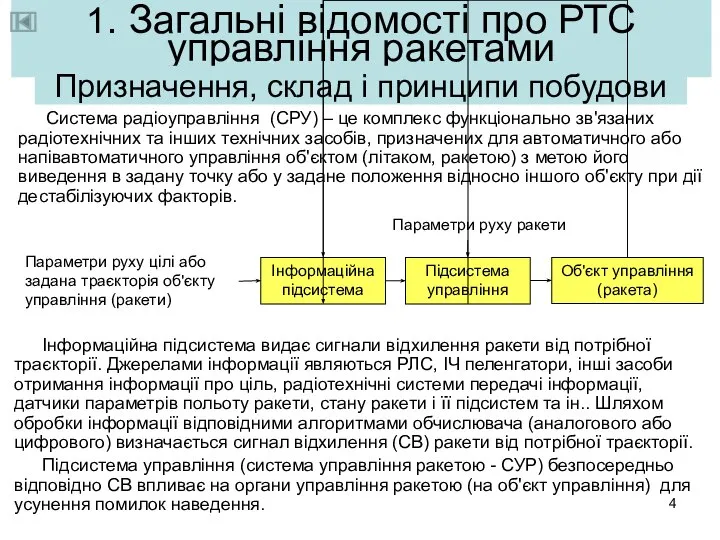
- 4. 1. Загальні відомості про РТС управління ракетами Система радіоуправління (СРУ) – це комплекс функціонально зв'язаних радіотехнічних
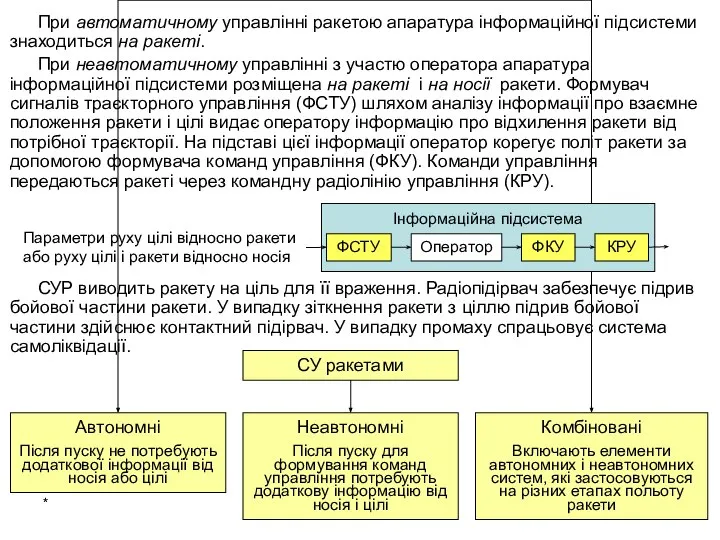
- 5. * При автоматичному управлінні ракетою апаратура інформаційної підсистеми знаходиться на ракеті. При неавтоматичному управлінні з участю
- 6. * Дестабілізуючі фактори призводять до відхилення ракети від потрібної траєкторії та профілю польоту. Система управління ракетою
- 7. В неавтономних СУР для формування параметру управління Δ використовується інформація, яка надходить від цілі (система самонаведення)
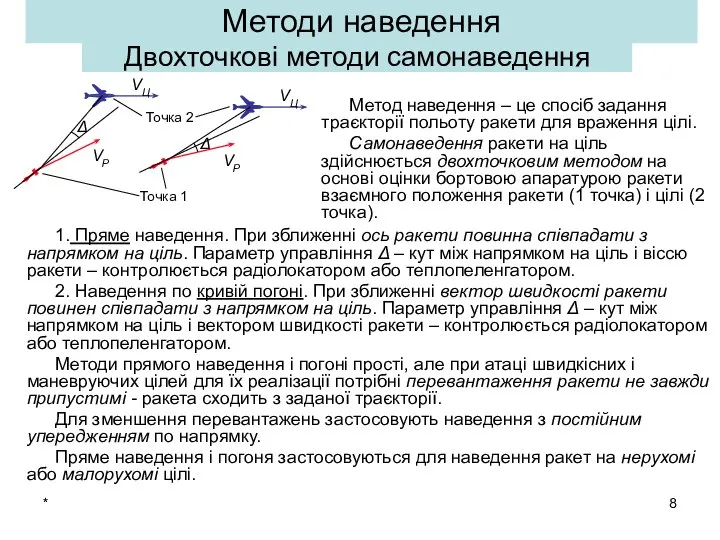
- 8. * Методи наведення 1. Пряме наведення. При зближенні ось ракети повинна співпадати з напрямком на ціль.
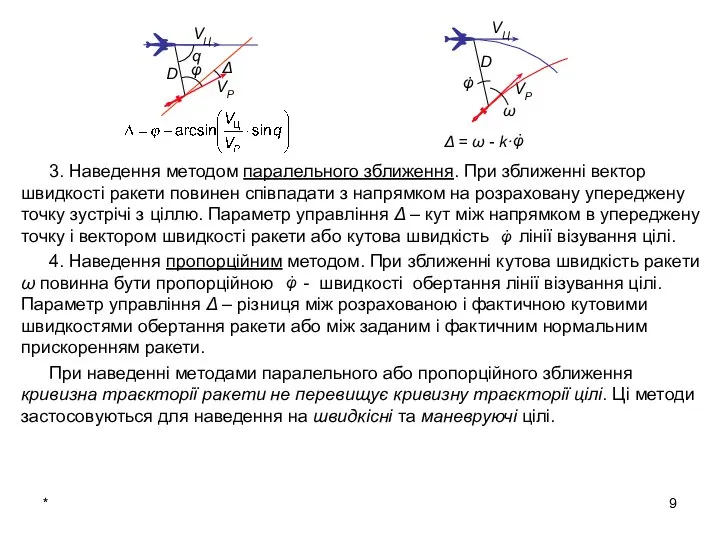
- 9. * 3. Наведення методом паралельного зближення. При зближенні вектор швидкості ракети повинен співпадати з напрямком на
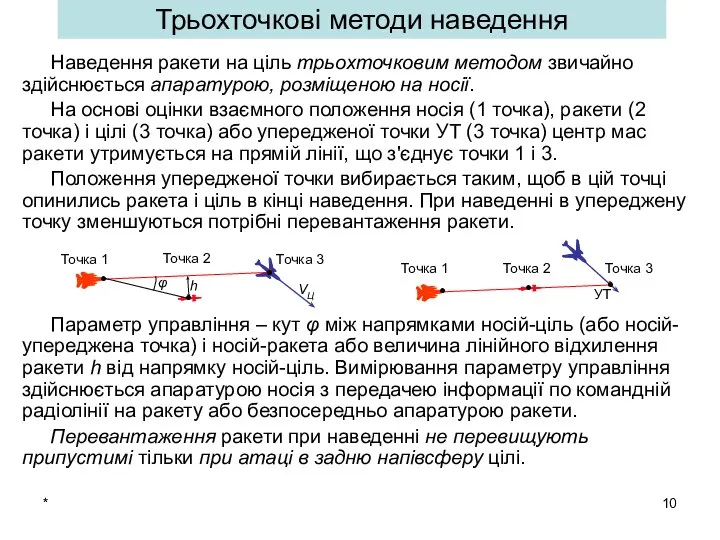
- 10. * Трьохточкові методи наведення Наведення ракети на ціль трьохточковим методом звичайно здійснюється апаратурою, розміщеною на носії.
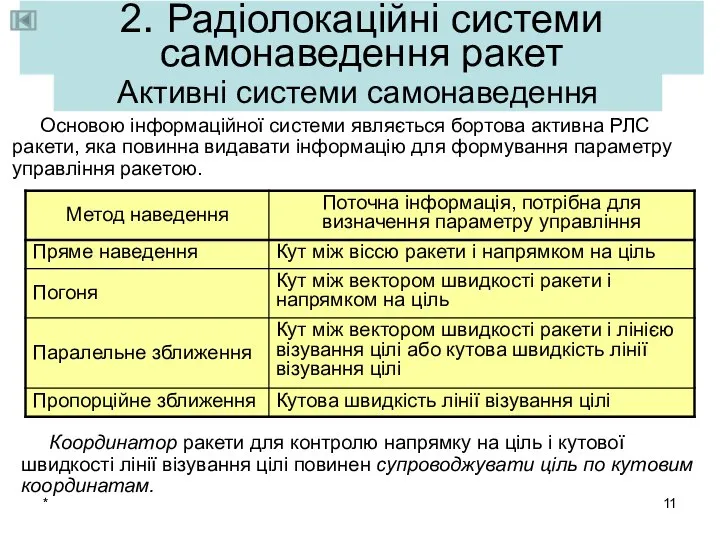
- 11. * 2. Радіолокаційні системи самонаведення ракет Основою інформаційної системи являється бортова активна РЛС ракети, яка повинна
- 12. * Переваги активних систем самонаведення: автономність; незалежність від метеоумов і власного випромінювання цілі; можливість додаткової селекції
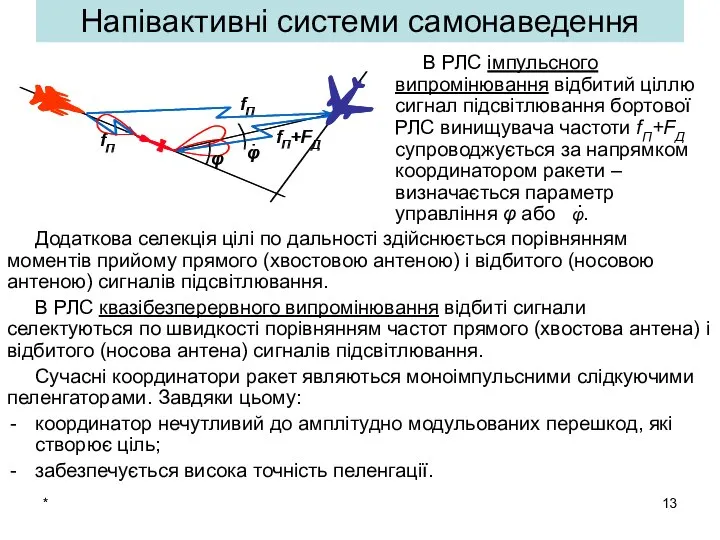
- 13. * Напівактивні системи самонаведення В РЛС імпульсного випромінювання відбитий ціллю сигнал підсвітлювання бортової РЛС винищувача частоти
- 14. * Селекція цілі по дальності чи швидкості зближення при імпульсному випромінюванні здійснюється слідкуючими системами дальності або
- 15. * Переваги напівактивних ГСН: велика дальність дії при малих розмірах і масі; незалежність від метеоумов і
- 16. * Пасивні системи самонаведення Координатор пасивної ГСН супроводжує ціль по її власному (тепловому) випромінюванню або по
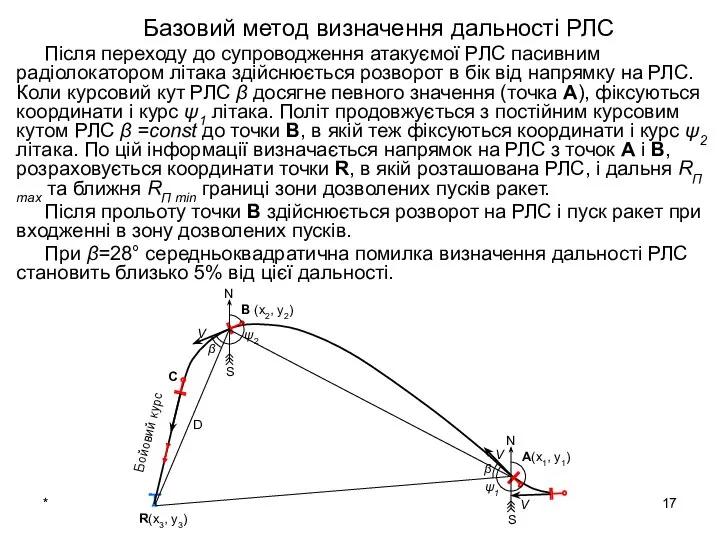
- 17. * Базовий метод визначення дальності РЛС Після переходу до супроводження атакуємої РЛС пасивним радіолокатором літака здійснюється
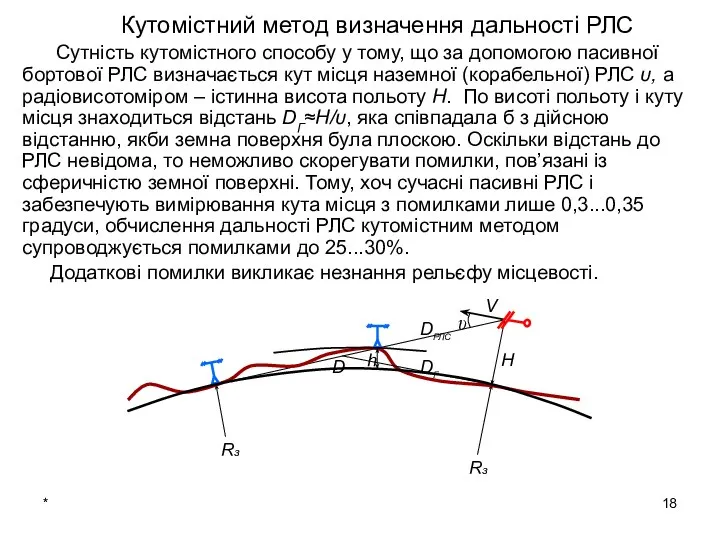
- 18. * Кутомістний метод визначення дальності РЛС Сутність кутомістного способу у тому, що за допомогою пасивної бортової
- 19. * Дальність дії системи самонаведення (DС) – це максимальна відстань між ракетою і ціллю, починаючи з
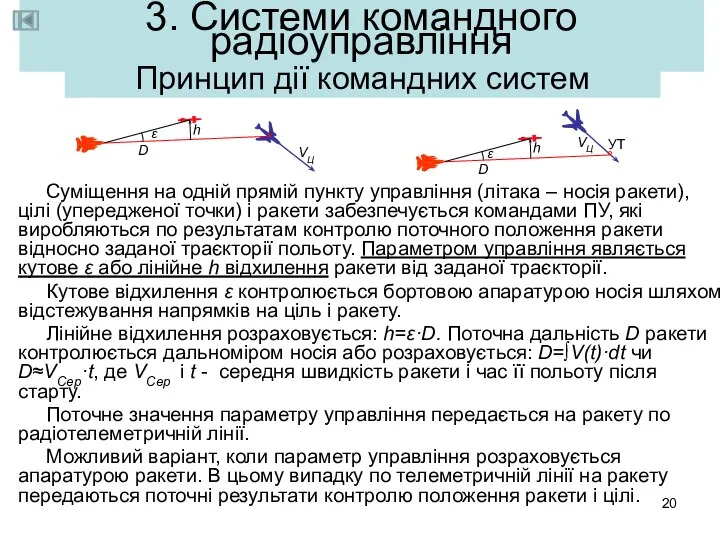
- 20. 3. Системи командного радіоуправління Суміщення на одній прямій пункту управління (літака – носія ракети), цілі (упередженої
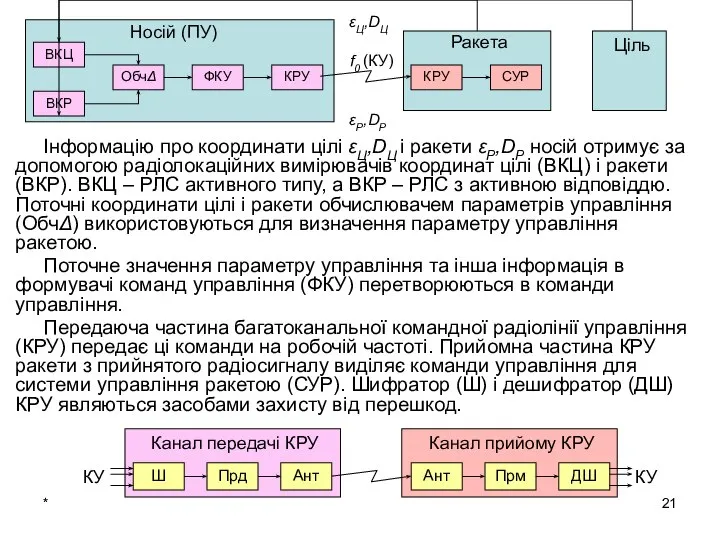
- 21. * Інформацію про координати цілі εЦ,DЦ і ракети εР,DР носій отримує за допомогою радіолокаційних вимірювачів координат
- 22. * Система командного радіоуправління винищувача В системах управління озброєнням сучасних винищувачів командне радіоуправління ракетами після їх
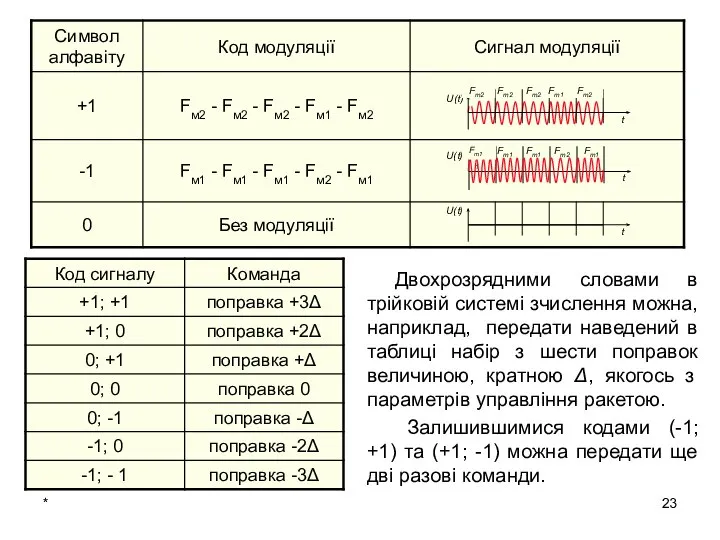
- 23. * Двохрозрядними словами в трійковій системі зчислення можна, наприклад, передати наведений в таблиці набір з шести
- 24. 4. Радіопідірвачі Підрив бойової частини (БЧ) ракети може здійснюватись: командами з носія (низька точність визначення моменту
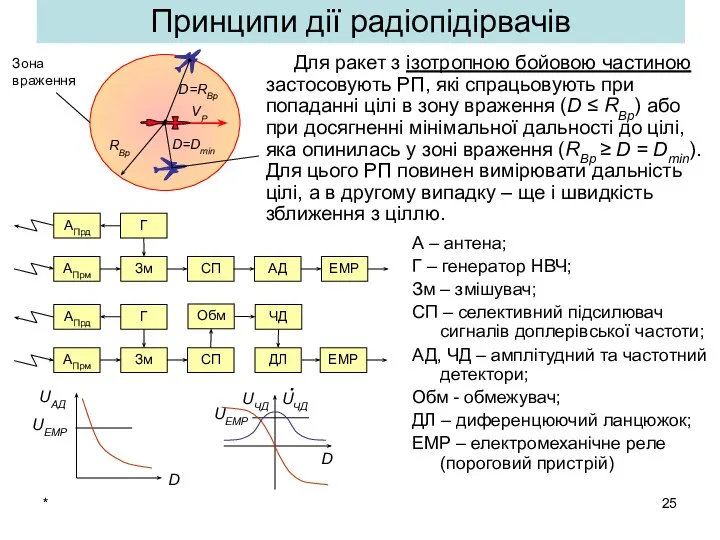
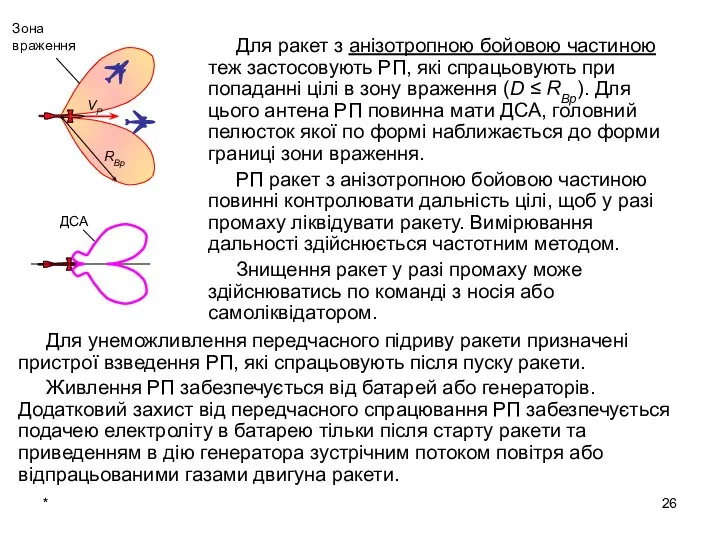
- 25. * Принципи дії радіопідірвачів Для ракет з ізотропною бойовою частиною застосовують РП, які спрацьовують при попаданні
- 26. * Для ракет з анізотропною бойовою частиною теж застосовують РП, які спрацьовують при попаданні цілі в
- 27. * Питання для самоконтролю Порівняльна характеристика автономних, неавтономних та комбінованих методів наведення. Сутність та засоби двохточкових
- 29. Скачать презентацию
*
Загальні відомості про радіотехнічні системи управління ракетами.
Радіолокаційні системи самонаведення ракет.
Системи командного
*
Загальні відомості про радіотехнічні системи управління ракетами.
Радіолокаційні системи самонаведення ракет.
Системи командного
Контрольні завдання (РТС УР)
При яких умовах наведення ракети на ціль прямим
Контрольні завдання (РТС УР)
При яких умовах наведення ракети на ціль прямим
1. Загальні відомості про РТС управління ракетами
Система радіоуправління (СРУ) –
1. Загальні відомості про РТС управління ракетами
Система радіоуправління (СРУ) –
*
При автоматичному управлінні ракетою апаратура інформаційної підсистеми знаходиться на ракеті.
При
*
При автоматичному управлінні ракетою апаратура інформаційної підсистеми знаходиться на ракеті.
При
*
Дестабілізуючі фактори призводять до відхилення ракети від потрібної траєкторії та профілю
*
Дестабілізуючі фактори призводять до відхилення ракети від потрібної траєкторії та профілю
В неавтономних СУР для формування параметру управління Δ використовується інформація, яка
В неавтономних СУР для формування параметру управління Δ використовується інформація, яка
*
Методи наведення
1. Пряме наведення. При зближенні ось ракети повинна співпадати з
*
Методи наведення
1. Пряме наведення. При зближенні ось ракети повинна співпадати з
*
3. Наведення методом паралельного зближення. При зближенні вектор швидкості ракети повинен
*
3. Наведення методом паралельного зближення. При зближенні вектор швидкості ракети повинен
*
Трьохточкові методи наведення
Наведення ракети на ціль трьохточковим методом звичайно здійснюється апаратурою,
*
Трьохточкові методи наведення
Наведення ракети на ціль трьохточковим методом звичайно здійснюється апаратурою,
*
2. Радіолокаційні системи самонаведення ракет
Основою інформаційної системи являється бортова активна РЛС
*
2. Радіолокаційні системи самонаведення ракет
Основою інформаційної системи являється бортова активна РЛС
*
Переваги активних систем самонаведення:
автономність;
незалежність від метеоумов і власного випромінювання цілі;
можливість додаткової
*
Переваги активних систем самонаведення:
автономність;
незалежність від метеоумов і власного випромінювання цілі;
можливість додаткової
*
Напівактивні системи самонаведення
В РЛС імпульсного випромінювання відбитий ціллю сигнал підсвітлювання бортової
*
Напівактивні системи самонаведення
В РЛС імпульсного випромінювання відбитий ціллю сигнал підсвітлювання бортової
*
Селекція цілі по дальності чи швидкості зближення при імпульсному випромінюванні здійснюється
*
Селекція цілі по дальності чи швидкості зближення при імпульсному випромінюванні здійснюється
*
Переваги напівактивних ГСН:
велика дальність дії при малих розмірах і масі;
незалежність від
*
Переваги напівактивних ГСН:
велика дальність дії при малих розмірах і масі;
незалежність від
*
Пасивні системи самонаведення
Координатор пасивної ГСН супроводжує ціль по її власному (тепловому)
*
Пасивні системи самонаведення
Координатор пасивної ГСН супроводжує ціль по її власному (тепловому)
*
Базовий метод визначення дальності РЛС
Після переходу до супроводження атакуємої РЛС пасивним
*
Базовий метод визначення дальності РЛС
Після переходу до супроводження атакуємої РЛС пасивним
*
Кутомістний метод визначення дальності РЛС
Сутність кутомістного способу у тому,
*
Кутомістний метод визначення дальності РЛС
Сутність кутомістного способу у тому,
*
Дальність дії системи самонаведення (DС) – це максимальна відстань між ракетою
*
Дальність дії системи самонаведення (DС) – це максимальна відстань між ракетою
3. Системи командного радіоуправління
Суміщення на одній прямій пункту управління (літака
3. Системи командного радіоуправління
Суміщення на одній прямій пункту управління (літака
*
Інформацію про координати цілі εЦ,DЦ і ракети εР,DР носій отримує за
*
Інформацію про координати цілі εЦ,DЦ і ракети εР,DР носій отримує за
*
Система командного радіоуправління винищувача
В системах управління озброєнням сучасних винищувачів командне радіоуправління
*
Система командного радіоуправління винищувача
В системах управління озброєнням сучасних винищувачів командне радіоуправління
*
Двохрозрядними словами в трійковій системі зчислення можна, наприклад, передати наведений в
*
Двохрозрядними словами в трійковій системі зчислення можна, наприклад, передати наведений в
4. Радіопідірвачі
Підрив бойової частини (БЧ) ракети може здійснюватись:
командами з носія
4. Радіопідірвачі
Підрив бойової частини (БЧ) ракети може здійснюватись:
командами з носія
*
Принципи дії радіопідірвачів
Для ракет з ізотропною бойовою частиною застосовують РП, які
*
Принципи дії радіопідірвачів
Для ракет з ізотропною бойовою частиною застосовують РП, які
*
Для ракет з анізотропною бойовою частиною теж застосовують РП, які спрацьовують
*
Для ракет з анізотропною бойовою частиною теж застосовують РП, які спрацьовують
*
Питання для самоконтролю
Порівняльна характеристика автономних, неавтономних та комбінованих методів наведення.
Сутність
*
Питання для самоконтролю
Порівняльна характеристика автономних, неавтономних та комбінованих методів наведення.
Сутність
 Экономический анализ. Оценка результатов хозяйственной деятельности
Экономический анализ. Оценка результатов хозяйственной деятельности Наркозно-дихальний апарат «ОБЕРІГ»-302 Твій професійний вибір
Наркозно-дихальний апарат «ОБЕРІГ»-302 Твій професійний вибір Айвазовский Иван Константинович
Айвазовский Иван Константинович Merry Christmas!
Merry Christmas! Достижения правоведов и отраслевых психологов в исследованиях преступных групп Подготовила Ивкина Юлия
Достижения правоведов и отраслевых психологов в исследованиях преступных групп Подготовила Ивкина Юлия  Дорога без опасности - презентация для начальной школы
Дорога без опасности - презентация для начальной школы Археология энеолита
Археология энеолита Презентация на тему "Из опыта работы муниципальной системы оценки качества образования" - скачать презентации по Педагогике
Презентация на тему "Из опыта работы муниципальной системы оценки качества образования" - скачать презентации по Педагогике Абсентеизм
Абсентеизм Учебник из семейной библиотеки Проект учащегося 2б класса МОУ СОШ № 17 Зозуля Егора.
Учебник из семейной библиотеки Проект учащегося 2б класса МОУ СОШ № 17 Зозуля Егора. Программирование и разработка веб-приложений. Использование Python для работы с базой данных
Программирование и разработка веб-приложений. Использование Python для работы с базой данных Строительство египетских пирамид
Строительство египетских пирамид Прославление Христа
Прославление Христа Методы обучения
Методы обучения Расчет железобетонных элементов по раскрытию трещин
Расчет железобетонных элементов по раскрытию трещин Особенности и классификация спортивных споров
Особенности и классификация спортивных споров Растениеводство Подготовили: Долиденко Вячеслав
Растениеводство Подготовили: Долиденко Вячеслав Презентация для Мастеров 03.02.2010
Презентация для Мастеров 03.02.2010 Презентация Основные формы собственности на использование вод
Презентация Основные формы собственности на использование вод Возможности использования ИКТ на уроках географии Гикал Людмила Владимировна, учитель географии ГОУ ЦО №1473 имени Г.А Тарана, ЗА
Возможности использования ИКТ на уроках географии Гикал Людмила Владимировна, учитель географии ГОУ ЦО №1473 имени Г.А Тарана, ЗА Натюрморт Мертвая натура?
Натюрморт Мертвая натура? Производная и ее геометрический смысл - презентация по Алгебре
Производная и ее геометрический смысл - презентация по Алгебре Система питания дизеля COMMON RAIL
Система питания дизеля COMMON RAIL Культура России 17 века
Культура России 17 века Тема лекции: Противодиабетические средства Доцент кафедры общей и клинической фармакологии с курсом ФПК и ПК Владимир Михайл
Тема лекции: Противодиабетические средства Доцент кафедры общей и клинической фармакологии с курсом ФПК и ПК Владимир Михайл fb728085_lektsiya_st1.ppt
fb728085_lektsiya_st1.ppt Русский народный праздничный костюм. 5 класс
Русский народный праздничный костюм. 5 класс Научно-практическая конференция «Первые шаги в науку» Тема выступления: «Азбука животного мира родного края»
Научно-практическая конференция «Первые шаги в науку» Тема выступления: «Азбука животного мира родного края»