- Т18 СРНС.ppt

Содержание
- 2. * Загальні відомості про супутникові системи оадіонавігації. Супутникова радіонавігаційна система GPS-Navstar. Супутникова радіонавігаційна система ГЛОНАСС. Застосування
- 3. * Контрольні завдання (СРНС) Проаналізуйте особливості навігаційного забезпечення польотів у високих широтах (1 бал). Проаналізуйте переваги
- 4. * 1. Загальні відомості про супутникові системи радіонавігації Супутникові радіонавігаційні системи (СРНС) відносяться до класу багатопозиційних
- 5. * Висоти орбіт сучасних СРНС близько 20 тис. км (період обертання супутника ~12 год). Супутники служать
- 6. * Глобальні СРНС Глобальні СРНС призначені для глобальної оперативної навігації рухомих об'єктів: наземних (сухопутних, морських), повітряних
- 7. * Орбітальне угруповання
- 8. * Концепція навігаційних визначень НАК обох систем виконує беззапитні виміри псевдодальності і радіальної псевдошвидкості до чотирьох
- 9. * Орбіти НШСЗ Геостаціонарна орбіта (ГСО) - Geosynchronous Earth Orbit (GEO) - екваторіальна кругова орбіта (Н=35875
- 10. * Переваги - енергетика. Недоліки - тривалість сеансів зв’язку 10-15 хв; на орбітах нижче 500 км
- 11. НАК * Принципи побудови і роботи Супутникова система місцевизначення - це система, у якій роль опорних
- 12. * В супутниковій системі визначення місцеположення: – навколо Землі на середньовисотних кругових орбітах обертаються НШСЗ, утворюючи
- 13. * Для вимірювання часу поширення радіохвиль від j-го НШСЗ до користувача код сигналу, прийнятий від НШСЗ,
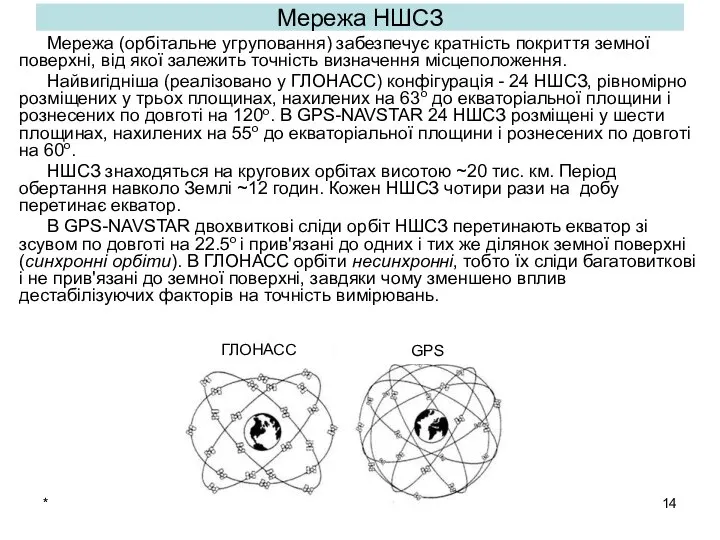
- 14. * Мережа НШСЗ Мережа (орбітальне угруповання) забезпечує кратність покриття земної поверхні, від якої залежить точність визначення
- 15. * На НШСЗ встановлено: засоби просторової стабілізації; апаратура траєкторних вимірювань; радіотелеметрична апаратура; апаратура програмного і командного
- 16. * Наземний КВК Склад КВК: головний синхронізатор системи, прийомовимірювач, траєкторний і радіотелеметричний вимірювально-обчислювальні комплекси, атмосферна служба,
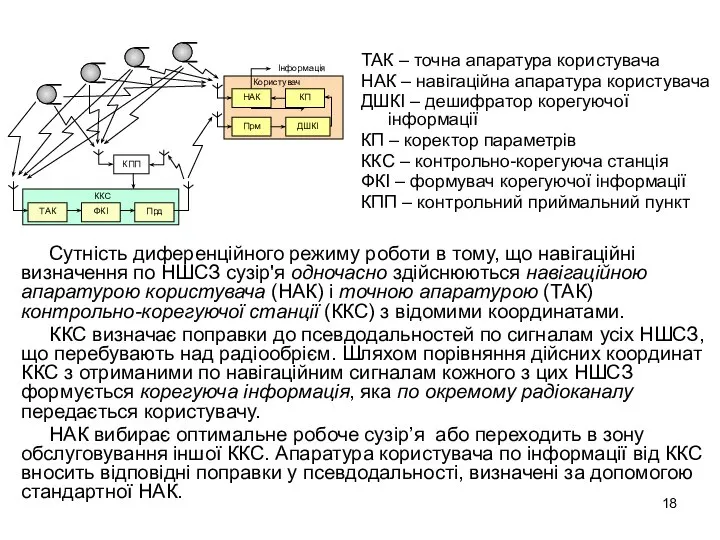
- 17. * Диференційний режим Окремі моделі НАК можуть здійснювати «диференційне вимірювання» з підвищеною точністю. Для цього робляться
- 18. ТАК – точна апаратура користувача НАК – навігаційна апаратура користувача ДШКІ – дешифратор корегуючої інформації КП
- 19. * Для оцінки якості корегуючої інформації в зоні дії передавача ККС розміщуюється “псевдосупутник” - контрольний приймальний
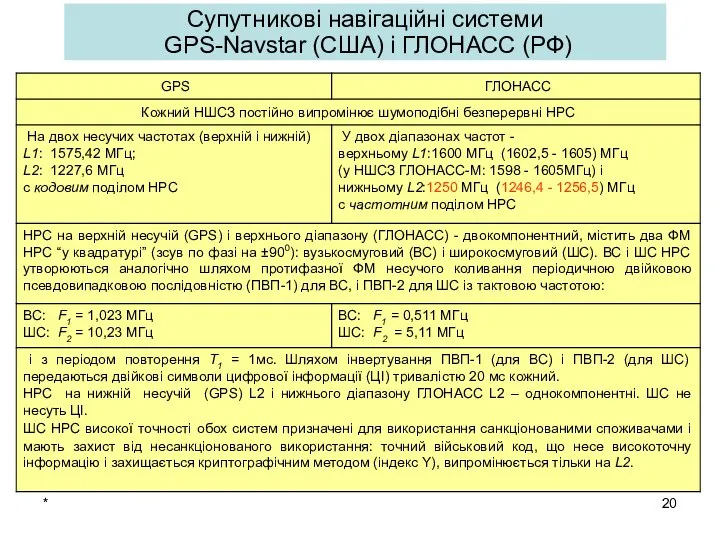
- 20. * Супутникові навігаційні системи GPS-Navstar (США) і ГЛОНАСС (РФ)
- 21. *
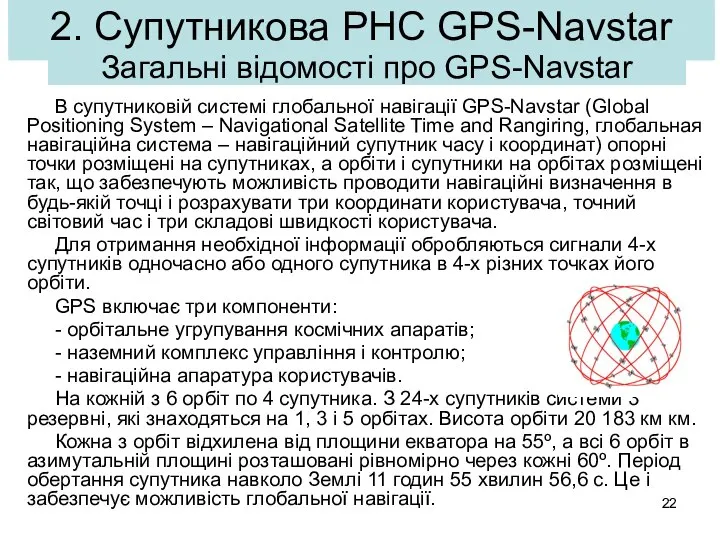
- 22. 2. Супутникова РНС GPS-Navstar В супутниковій системі глобальної навігації GPS-Navstar (Global Positioning System – Navigational Satellite
- 23. * Кодування повідомлень Кожен супутник застосовує два коди: загальнодоступний грубий С/А (Coarse Acgution), що легко виявляється
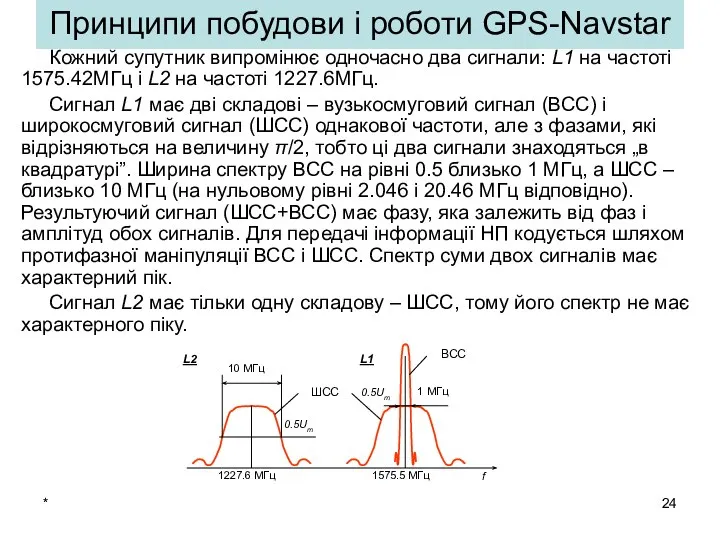
- 24. * Принципи побудови і роботи GPS-Navstar Кожний супутник випромінює одночасно два сигнали: L1 на частоті 1575.42МГц
- 25. * ВСС несе всю необхідну інформацію для проведення НВ всіма користувачами із стандартною точністю. ШСС несе
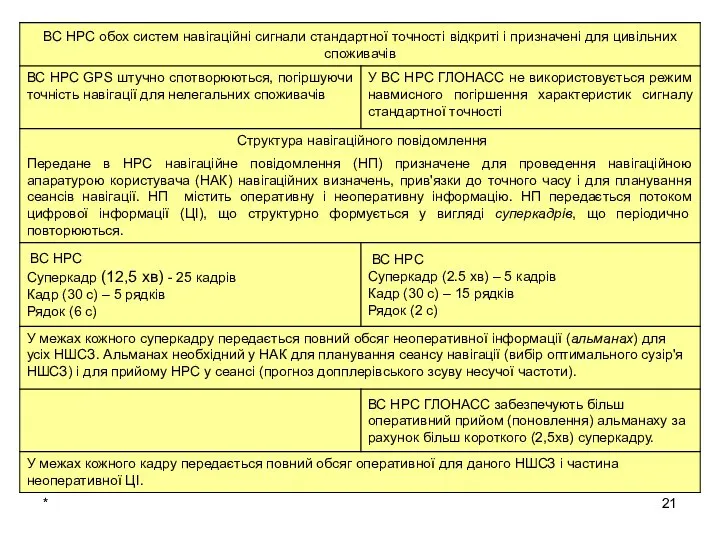
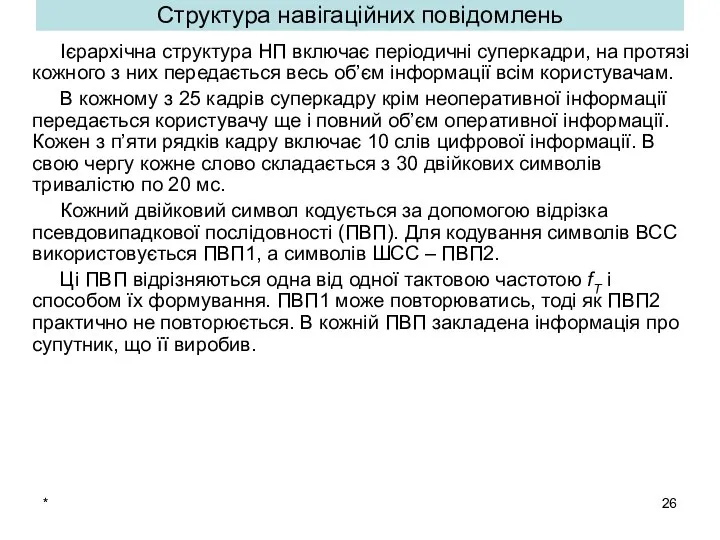
- 26. * Структура навігаційних повідомлень Ієрархічна структура НП включає періодичні суперкадри, на протязі кожного з них передається
- 27. * Структура навігаційного повідомлення GPS
- 28. * Принцип кодування навігаційних повідомлень Двійкові символи інформації „0” або „1” кодуються шляхом використання частини відповідної
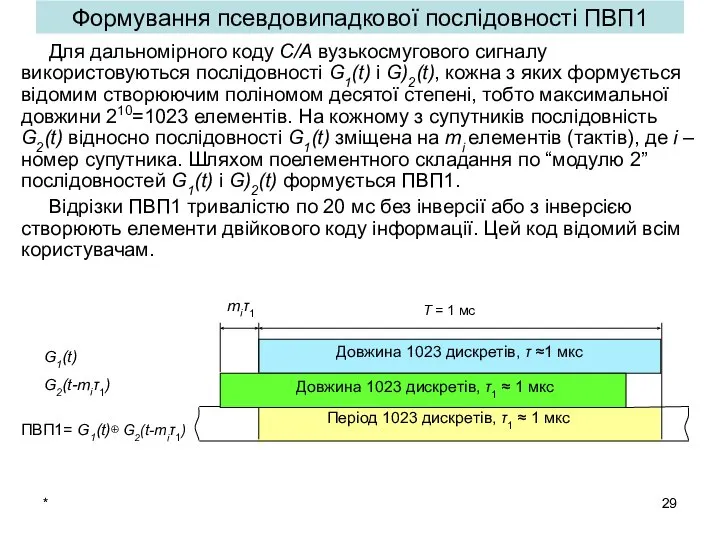
- 29. * Формування псевдовипадкової послідовності ПВП1 Для дальномірного коду С/А вузькосмугового сигналу використовуються послідовності G1(t) і G)2(t),
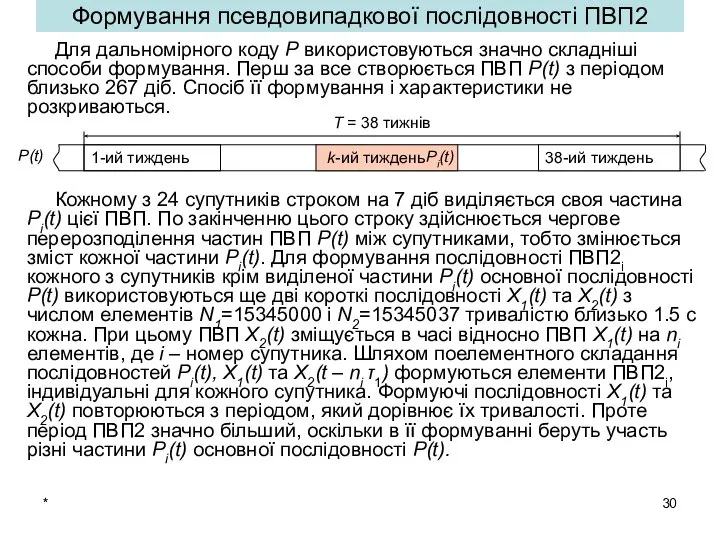
- 30. * Формування псевдовипадкової послідовності ПВП2 Для дальномірного коду Р використовуються значно складніші способи формування. Перш за
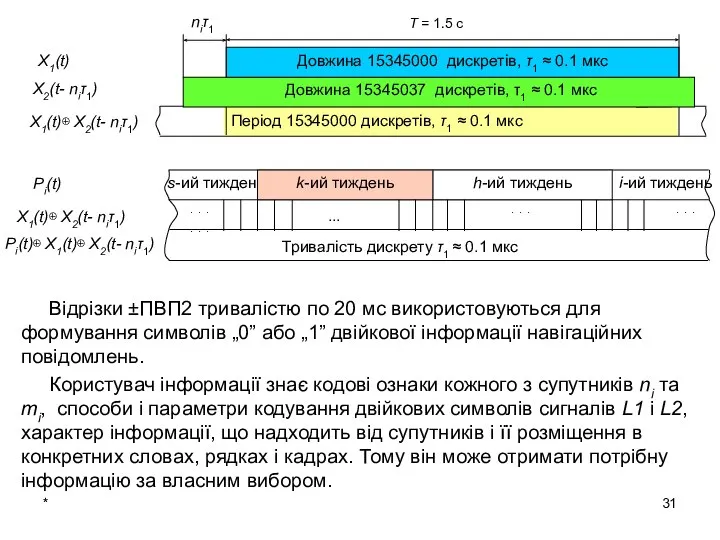
- 31. * Відрізки ±ПВП2 тривалістю по 20 мс використовуються для формування символів „0” або „1” двійкової інформації
- 32. * Космічний компонент На початку експлуатації (до 1995 р) складав 10 НШСЗ “Bloсk І” на двох
- 33. * НШСЗ системи GPS
- 34. * Модернізація GPS направлена на підвищення точності навігаційних визначень, покращення обслуговування користувачів, збільшення строку роботи і
- 35. * Навігаційне обладнання користувачів Прийомне обладнання користувачів забезпечує отримання навігаційної інформації: - координати, швидкість користувача, -
- 36. * Приймальна станція включає: - антену (неадаптивну або адаптивну); - пристрій прийому, перетворення і обробки сигналів;
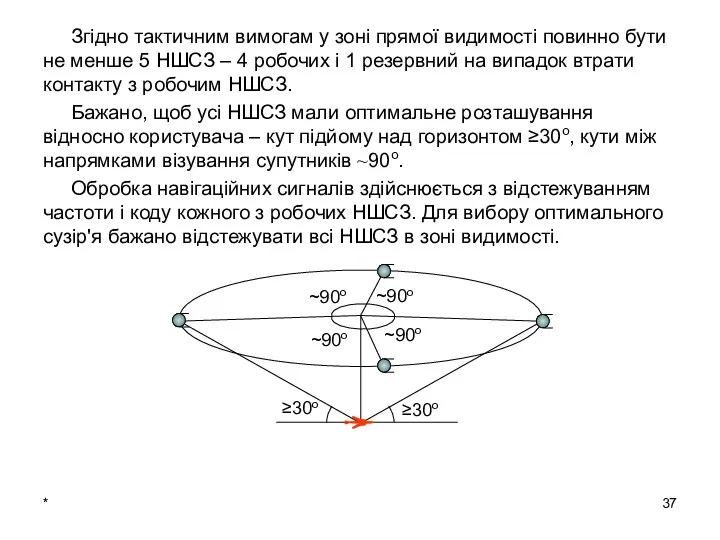
- 37. * Згідно тактичним вимогам у зоні прямої видимості повинно бути не менше 5 НШСЗ – 4
- 38. * 3. Супутникова РНС ГЛОНАСС Глобальна супутникова навігаційна система ГЛОНАСС призначена для визначення місцеположення, швидкості руху
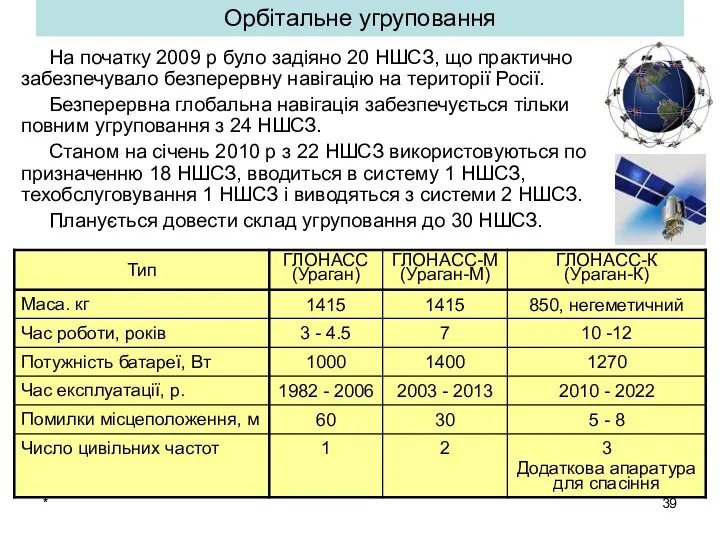
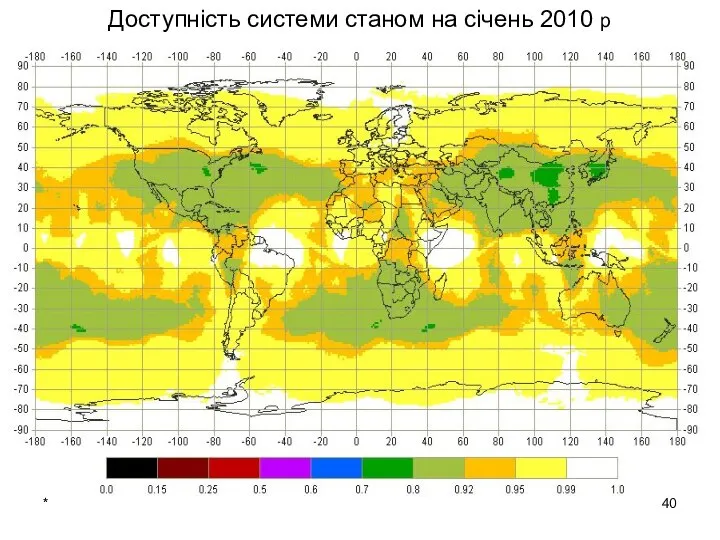
- 39. * Орбітальне угруповання На початку 2009 р було задіяно 20 НШСЗ, що практично забезпечувало безперервну навігацію
- 40. * Доступність системи станом на січень 2010 р
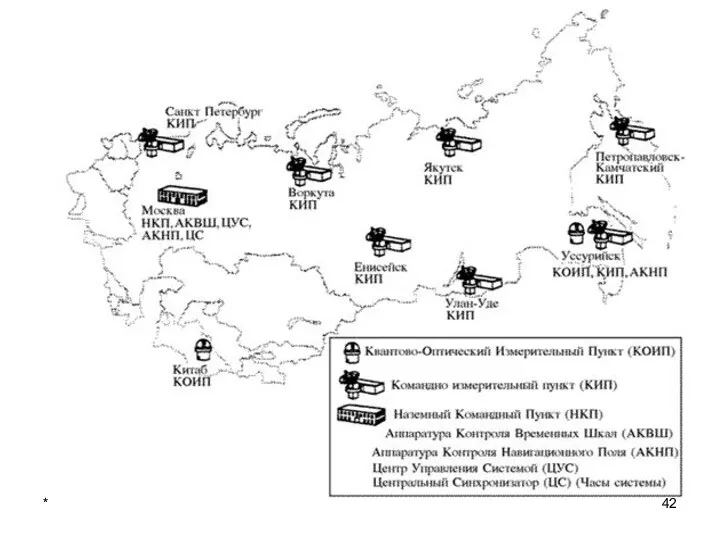
- 41. * Наземний компонент Підсистема контролю і управління включає Центр управління системою (ЦУС) у районі Москви і
- 42. *
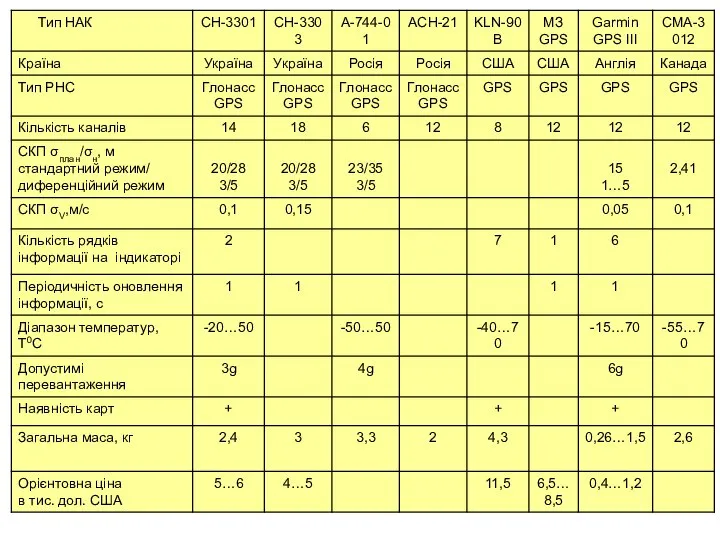
- 43. * Навігаційна апаратура користувачів Навігаційна апаратура користувачів (НАК) включає: антенну систему. радіочастотний приймач, пристрій обробки навігаційних
- 45. * Помилки визначення місцеположення (м)
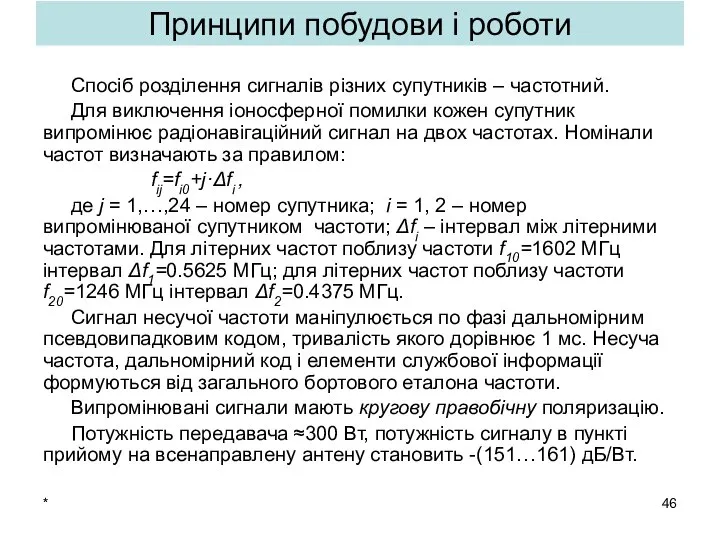
- 46. * Принципи побудови і роботи Спосіб розділення сигналів різних супутників – частотний. Для виключення іоносферної помилки
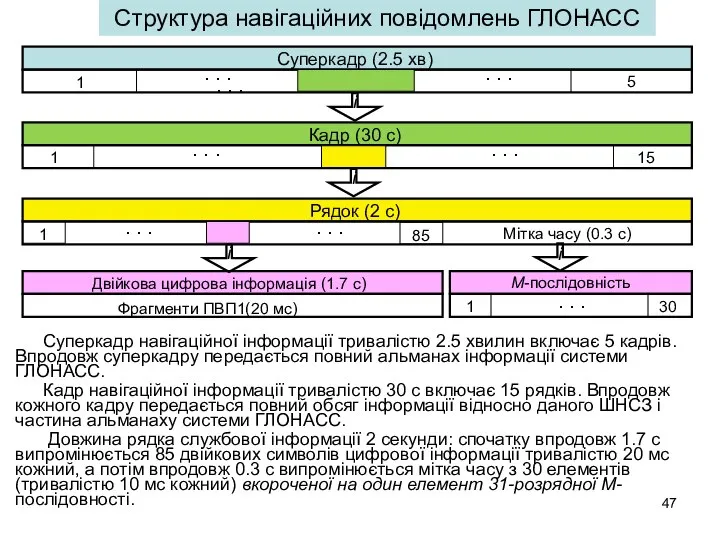
- 47. Структура навігаційних повідомлень ГЛОНАСС Суперкадр навігаційної інформації тривалістю 2.5 хвилин включає 5 кадрів. Впродовж суперкадру передається
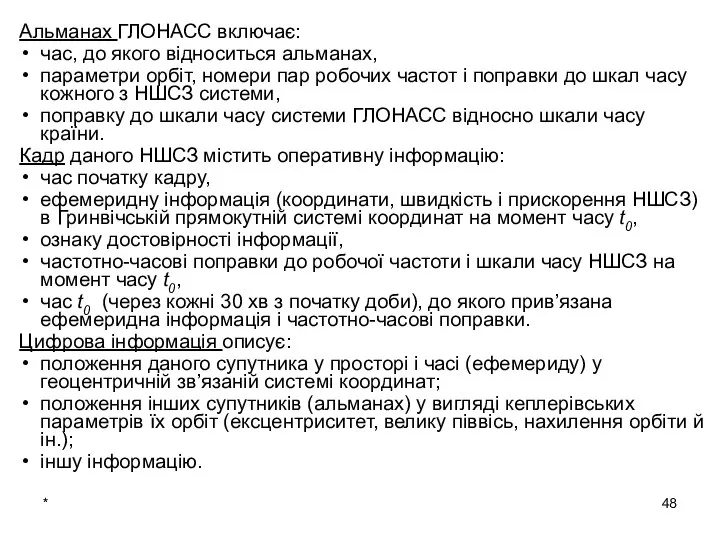
- 48. * Альманах ГЛОНАСС включає: час, до якого відноситься альманах, параметри орбіт, номери пар робочих частот і
- 49. * Формування кодів дальномірного (ПВП1) і цифрової інформації (КЦІ) “+ПВП” і “-ПВП” – це неінвертовані та
- 50. * Формування навігаційного сигналу L1 Код цифрової інформації складається з фрагментів неінвертованої (+ПВП1) або інвертованої (-ПВП1)
- 51. * Програма розвитку ГЛОНАСС 1 етап (до 2003 р). Підтримання системи на мінімально допустимому рівні запусками
- 52. * Точність визначення координат користувача залежить від числа використаних НШСЗ і геометрії їх розташування відносно користувача.
- 53. * Перспективні Європейські СРНС EGNOS (European Geostationari Navigation Overlay Strvices) – це проект Європейської глобальної навігаційної
- 54. * GALILEO – цивільна комерційна супутникова РНС. Планується на трьох кругових орбітах з нахилом 56о висотою
- 55. * Питання для самоконтролю Призначення і склад супутникової навігаційної системи. Принцип дії супутникової навігаційної системи. Сутність
- 57. Скачать презентацию
*
Загальні відомості про супутникові системи оадіонавігації.
Супутникова радіонавігаційна система GPS-Navstar.
Супутникова радіонавігаційна система
*
Загальні відомості про супутникові системи оадіонавігації.
Супутникова радіонавігаційна система GPS-Navstar.
Супутникова радіонавігаційна система
*
Контрольні завдання (СРНС)
Проаналізуйте особливості навігаційного забезпечення польотів у високих широтах (1
*
Контрольні завдання (СРНС)
Проаналізуйте особливості навігаційного забезпечення польотів у високих широтах (1
*
1. Загальні відомості про супутникові системи радіонавігації
Супутникові радіонавігаційні системи (СРНС)
*
1. Загальні відомості про супутникові системи радіонавігації
Супутникові радіонавігаційні системи (СРНС)
*
Висоти орбіт сучасних СРНС близько 20 тис. км (період обертання супутника
*
Висоти орбіт сучасних СРНС близько 20 тис. км (період обертання супутника
*
Глобальні СРНС
Глобальні СРНС призначені для глобальної оперативної навігації рухомих об'єктів: наземних
*
Глобальні СРНС
Глобальні СРНС призначені для глобальної оперативної навігації рухомих об'єктів: наземних
*
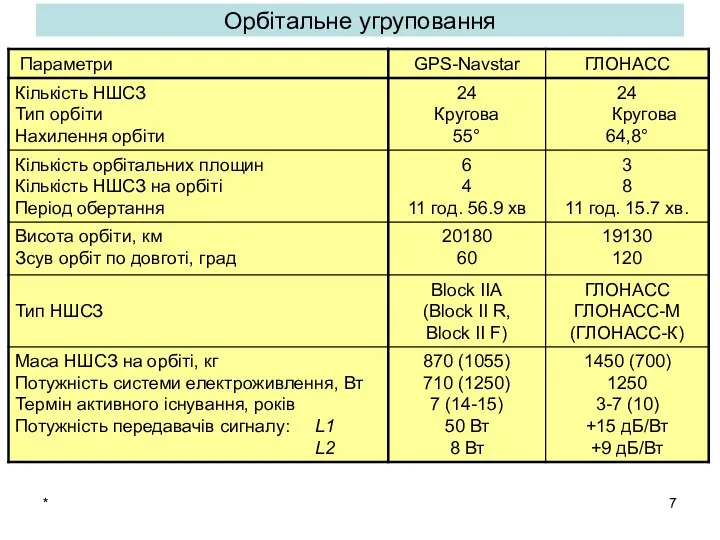
Орбітальне угруповання
*
Орбітальне угруповання
*
Концепція навігаційних визначень
НАК обох систем виконує беззапитні виміри псевдодальності і радіальної
*
Концепція навігаційних визначень
НАК обох систем виконує беззапитні виміри псевдодальності і радіальної
*
Орбіти НШСЗ
Геостаціонарна орбіта (ГСО) - Geosynchronous Earth Orbit (GEO) - екваторіальна
*
Орбіти НШСЗ
Геостаціонарна орбіта (ГСО) - Geosynchronous Earth Orbit (GEO) - екваторіальна
*
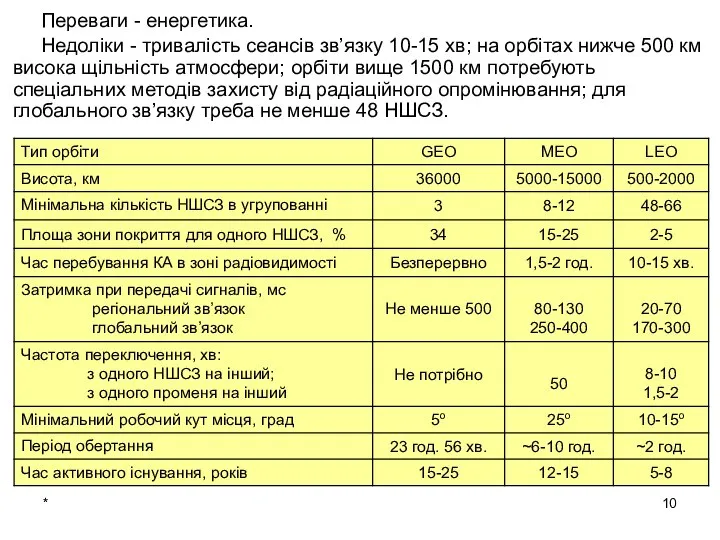
Переваги - енергетика.
Недоліки - тривалість сеансів зв’язку 10-15 хв; на
*
Переваги - енергетика.
Недоліки - тривалість сеансів зв’язку 10-15 хв; на
НАК
*
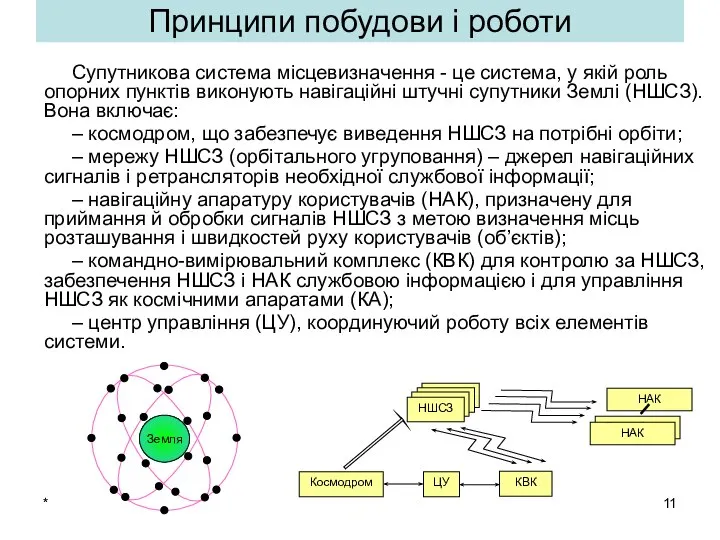
Принципи побудови і роботи
Супутникова система місцевизначення - це система, у якій
НАК
*
Принципи побудови і роботи
Супутникова система місцевизначення - це система, у якій
*
В супутниковій системі визначення місцеположення:
– навколо Землі на середньовисотних кругових орбітах
*
В супутниковій системі визначення місцеположення:
– навколо Землі на середньовисотних кругових орбітах
*
Для вимірювання часу поширення радіохвиль від j-го НШСЗ до користувача код
*
Для вимірювання часу поширення радіохвиль від j-го НШСЗ до користувача код
*
Мережа НШСЗ
Мережа (орбітальне угруповання) забезпечує кратність покриття земної поверхні, від якої
*
Мережа НШСЗ
Мережа (орбітальне угруповання) забезпечує кратність покриття земної поверхні, від якої
*
На НШСЗ встановлено: засоби просторової стабілізації; апаратура траєкторних вимірювань; радіотелеметрична апаратура;
*
На НШСЗ встановлено: засоби просторової стабілізації; апаратура траєкторних вимірювань; радіотелеметрична апаратура;
*
Наземний КВК
Склад КВК: головний синхронізатор системи, прийомовимірювач, траєкторний і радіотелеметричний вимірювально-обчислювальні
*
Наземний КВК
Склад КВК: головний синхронізатор системи, прийомовимірювач, траєкторний і радіотелеметричний вимірювально-обчислювальні
*
Диференційний режим
Окремі моделі НАК можуть здійснювати «диференційне вимірювання» з підвищеною точністю.
*
Диференційний режим
Окремі моделі НАК можуть здійснювати «диференційне вимірювання» з підвищеною точністю.
ТАК – точна апаратура користувача
НАК – навігаційна апаратура користувача
ДШКІ – дешифратор
ТАК – точна апаратура користувача
НАК – навігаційна апаратура користувача
ДШКІ – дешифратор
*
Для оцінки якості корегуючої інформації в зоні дії передавача ККС розміщуюється
*
Для оцінки якості корегуючої інформації в зоні дії передавача ККС розміщуюється
*
Супутникові навігаційні системи
GPS-Navstar (США) і ГЛОНАСС (РФ)
*
Супутникові навігаційні системи
GPS-Navstar (США) і ГЛОНАСС (РФ)
*
*
2. Супутникова РНС GPS-Navstar
В супутниковій системі глобальної навігації GPS-Navstar (Global Positioning
2. Супутникова РНС GPS-Navstar
В супутниковій системі глобальної навігації GPS-Navstar (Global Positioning
*
Кодування повідомлень
Кожен супутник застосовує два коди: загальнодоступний грубий С/А (Coarse Acgution),
*
Кодування повідомлень
Кожен супутник застосовує два коди: загальнодоступний грубий С/А (Coarse Acgution),
*
Принципи побудови і роботи GPS-Navstar
Кожний супутник випромінює одночасно два сигнали: L1
*
Принципи побудови і роботи GPS-Navstar
Кожний супутник випромінює одночасно два сигнали: L1
*
ВСС несе всю необхідну інформацію для проведення НВ всіма користувачами із
*
ВСС несе всю необхідну інформацію для проведення НВ всіма користувачами із
*
Структура навігаційних повідомлень
Ієрархічна структура НП включає періодичні суперкадри, на протязі кожного
*
Структура навігаційних повідомлень
Ієрархічна структура НП включає періодичні суперкадри, на протязі кожного

*
Структура навігаційного повідомлення GPS
*
Структура навігаційного повідомлення GPS

*
Принцип кодування навігаційних повідомлень
Двійкові символи інформації „0” або „1” кодуються шляхом
*
Принцип кодування навігаційних повідомлень
Двійкові символи інформації „0” або „1” кодуються шляхом
*
Формування псевдовипадкової послідовності ПВП1
Для дальномірного коду С/А вузькосмугового сигналу використовуються послідовності
*
Формування псевдовипадкової послідовності ПВП1
Для дальномірного коду С/А вузькосмугового сигналу використовуються послідовності
*
Формування псевдовипадкової послідовності ПВП2
Для дальномірного коду Р використовуються значно складніші способи
*
Формування псевдовипадкової послідовності ПВП2
Для дальномірного коду Р використовуються значно складніші способи
*
Відрізки ±ПВП2 тривалістю по 20 мс використовуються для формування символів „0”
*
Відрізки ±ПВП2 тривалістю по 20 мс використовуються для формування символів „0”
*
Космічний компонент
На початку експлуатації (до 1995 р) складав 10 НШСЗ “Bloсk
*
Космічний компонент
На початку експлуатації (до 1995 р) складав 10 НШСЗ “Bloсk
*
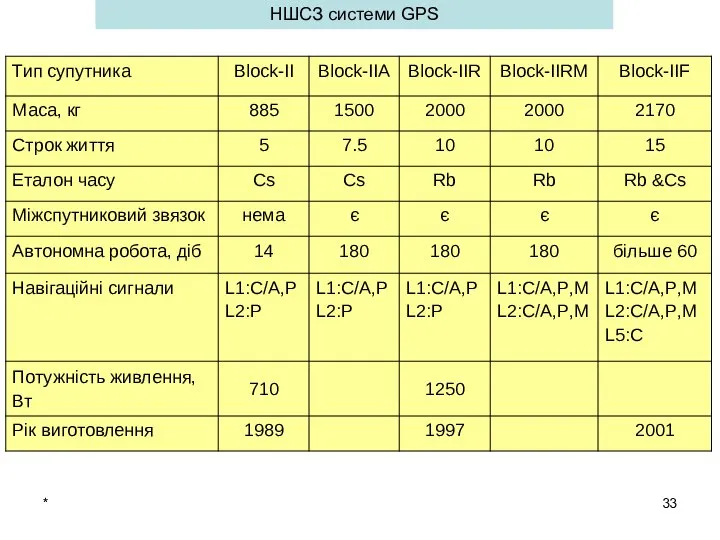
НШСЗ системи GPS
*
НШСЗ системи GPS
*
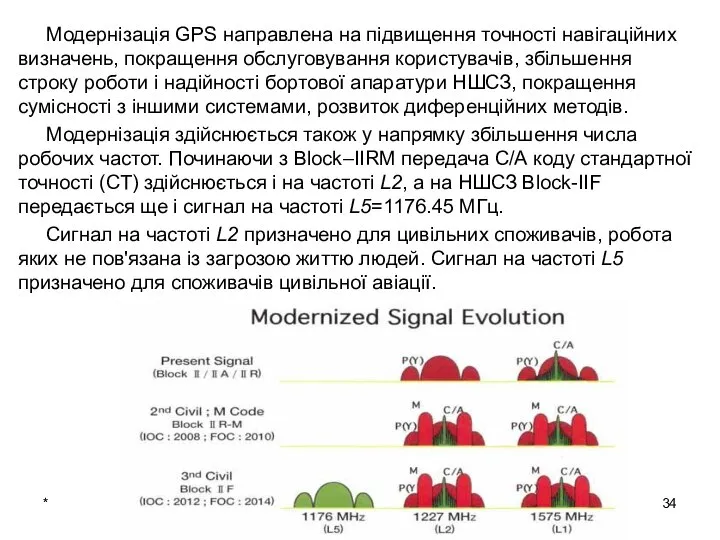
Модернізація GPS направлена на підвищення точності навігаційних визначень, покращення обслуговування користувачів,
*
Модернізація GPS направлена на підвищення точності навігаційних визначень, покращення обслуговування користувачів,
*
Навігаційне обладнання користувачів
Прийомне обладнання користувачів забезпечує отримання навігаційної інформації:
- координати,
*
Навігаційне обладнання користувачів
Прийомне обладнання користувачів забезпечує отримання навігаційної інформації:
- координати,
*
Приймальна станція включає:
- антену (неадаптивну або адаптивну);
- пристрій прийому, перетворення і
*
Приймальна станція включає:
- антену (неадаптивну або адаптивну);
- пристрій прийому, перетворення і
*
Згідно тактичним вимогам у зоні прямої видимості повинно бути не менше
*
Згідно тактичним вимогам у зоні прямої видимості повинно бути не менше
*
3. Супутникова РНС ГЛОНАСС
Глобальна супутникова навігаційна система ГЛОНАСС призначена для визначення
*
3. Супутникова РНС ГЛОНАСС
Глобальна супутникова навігаційна система ГЛОНАСС призначена для визначення
*
Орбітальне угруповання
На початку 2009 р було задіяно 20 НШСЗ, що практично
*
Орбітальне угруповання
На початку 2009 р було задіяно 20 НШСЗ, що практично
*
Доступність системи станом на січень 2010 р
*
Доступність системи станом на січень 2010 р
*
Наземний компонент
Підсистема контролю і управління включає Центр управління системою (ЦУС) у
*
Наземний компонент
Підсистема контролю і управління включає Центр управління системою (ЦУС) у
*
*
*
Навігаційна апаратура користувачів
Навігаційна апаратура користувачів (НАК) включає:
антенну систему.
радіочастотний приймач,
пристрій обробки навігаційних
*
Навігаційна апаратура користувачів
Навігаційна апаратура користувачів (НАК) включає:
антенну систему.
радіочастотний приймач,
пристрій обробки навігаційних

*
Помилки визначення місцеположення (м)
*
Помилки визначення місцеположення (м)
*
Принципи побудови і роботи
Спосіб розділення сигналів різних супутників – частотний.
Для виключення
*
Принципи побудови і роботи
Спосіб розділення сигналів різних супутників – частотний.
Для виключення
Структура навігаційних повідомлень ГЛОНАСС
Суперкадр навігаційної інформації тривалістю 2.5 хвилин включає 5
Структура навігаційних повідомлень ГЛОНАСС
Суперкадр навігаційної інформації тривалістю 2.5 хвилин включає 5
*
Альманах ГЛОНАСС включає:
час, до якого відноситься альманах,
параметри орбіт, номери пар робочих
*
Альманах ГЛОНАСС включає:
час, до якого відноситься альманах,
параметри орбіт, номери пар робочих
*
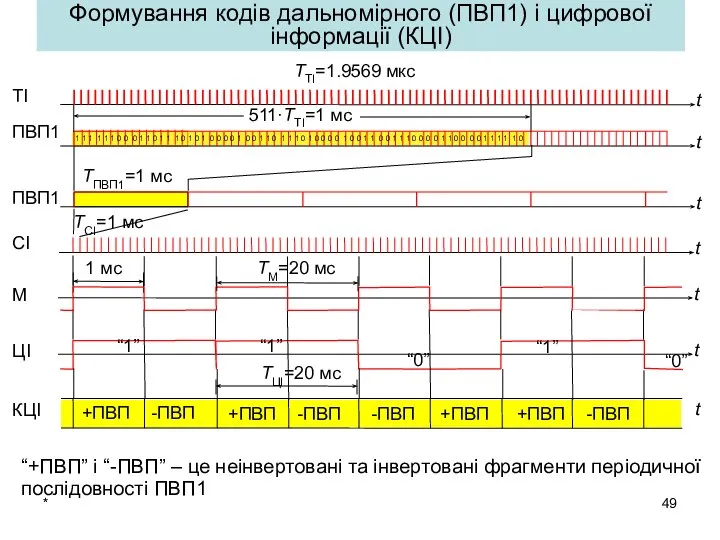
Формування кодів дальномірного (ПВП1) і цифрової інформації (КЦІ)
“+ПВП” і “-ПВП” –
*
Формування кодів дальномірного (ПВП1) і цифрової інформації (КЦІ)
“+ПВП” і “-ПВП” –
*
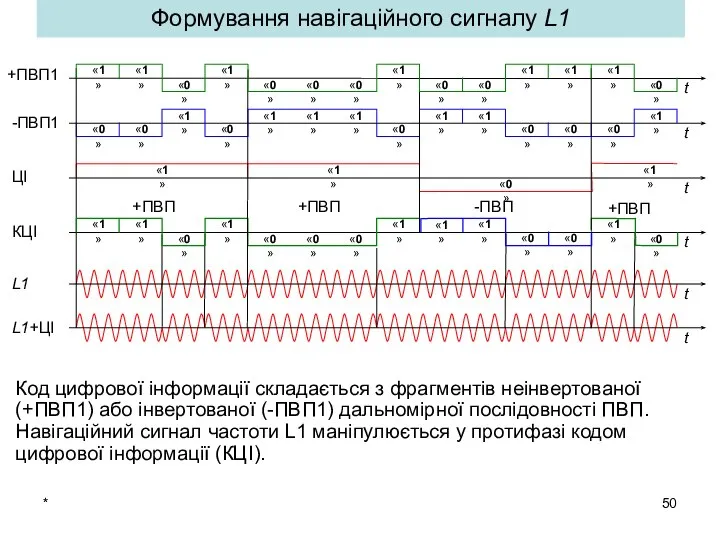
Формування навігаційного сигналу L1
Код цифрової інформації складається з фрагментів неінвертованої
*
Формування навігаційного сигналу L1
Код цифрової інформації складається з фрагментів неінвертованої
*
Програма розвитку ГЛОНАСС
1 етап (до 2003 р).
Підтримання системи на мінімально допустимому
*
Програма розвитку ГЛОНАСС
1 етап (до 2003 р).
Підтримання системи на мінімально допустимому
*
Точність визначення координат користувача залежить від числа використаних НШСЗ і геометрії
*
Точність визначення координат користувача залежить від числа використаних НШСЗ і геометрії
*
Перспективні Європейські СРНС
EGNOS (European Geostationari Navigation Overlay Strvices) – це проект
*
Перспективні Європейські СРНС
EGNOS (European Geostationari Navigation Overlay Strvices) – це проект
*
GALILEO – цивільна комерційна супутникова РНС. Планується на трьох кругових орбітах
*
GALILEO – цивільна комерційна супутникова РНС. Планується на трьох кругових орбітах
*
Питання для самоконтролю
Призначення і склад супутникової навігаційної системи.
Принцип дії супутникової
*
Питання для самоконтролю
Призначення і склад супутникової навігаційної системи.
Принцип дії супутникової
 НАТО (Организация Североатлантического Договора)
НАТО (Организация Североатлантического Договора) Родительское собрание Круглый стол: родители и дети
Родительское собрание Круглый стол: родители и дети Презентация "Андрей Рублёв (10 класс)" - скачать презентации по МХК
Презентация "Андрей Рублёв (10 класс)" - скачать презентации по МХК Система и принципы физической культуры в РФ
Система и принципы физической культуры в РФ Дәріхана ұйымын жүйлелендірудегі экономикалық көрсеткіштер
Дәріхана ұйымын жүйлелендірудегі экономикалық көрсеткіштер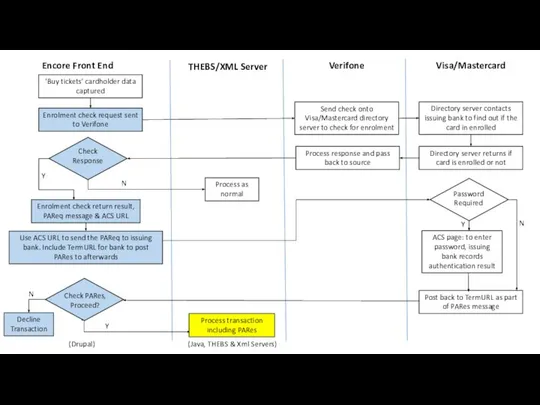 The block diagram of ticket purchase via the web interface
The block diagram of ticket purchase via the web interface Культура Київської Русi
Культура Київської Русi Презентация "Греческая керамика" - скачать презентации по МХК_
Презентация "Греческая керамика" - скачать презентации по МХК_ Технічне обслуговування електрообладнання автомобілів та системи запалювання карбюраторних двигунів (6)
Технічне обслуговування електрообладнання автомобілів та системи запалювання карбюраторних двигунів (6) Легализация (отмывание) денежных средств. Современное состояние и предупреждение
Легализация (отмывание) денежных средств. Современное состояние и предупреждение Из истории портрета
Из истории портрета Объектно-реляционные базы данных
Объектно-реляционные базы данных Магнитные цепи и электромагнитные устройства. Трансформатор (продолжение)
Магнитные цепи и электромагнитные устройства. Трансформатор (продолжение) Пропагандистські війни
Пропагандистські війни Презентация "ВИДЫ И СПОСОБЫ ТОРГОВЛИ" - скачать презентации по Экономике_
Презентация "ВИДЫ И СПОСОБЫ ТОРГОВЛИ" - скачать презентации по Экономике_ Стратегическое управление. Лекция 3
Стратегическое управление. Лекция 3 Презентация "Треченто в живописи." - скачать презентации по МХК
Презентация "Треченто в живописи." - скачать презентации по МХК Познание духовной природы мужчины и женщины - путь к гармонии
Познание духовной природы мужчины и женщины - путь к гармонии Момбекова
Момбекова А1. Существует несколько значений понятия «экономика». Какая позиция иллюстрирует экономику как хозяйство? А1. Существует несколь
А1. Существует несколько значений понятия «экономика». Какая позиция иллюстрирует экономику как хозяйство? А1. Существует несколь Rocket Hostel
Rocket Hostel Великобритания (Политическая система, образование, культура и традиции)
Великобритания (Политическая система, образование, культура и традиции) ElleGirl.ru Ломакина Екатерина Андреевна ИД-401
ElleGirl.ru Ломакина Екатерина Андреевна ИД-401 Устами младенца - презентация для начальной школы_
Устами младенца - презентация для начальной школы_ Готика в средневековой Западной Европе
Готика в средневековой Западной Европе Сфера духовной жизни
Сфера духовной жизни Федеральная таможенная служба Российской Федерации. Федеральная служба охраны Российской Федерации. Лекция № 5
Федеральная таможенная служба Российской Федерации. Федеральная служба охраны Российской Федерации. Лекция № 5 ЛР и руководство пользователя
ЛР и руководство пользователя