- Управление промышленными мехатронными системами

Содержание
- 2. 3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС Лекция 3, слайд 1 Рис. 3.1. Обобщенная схема машины с
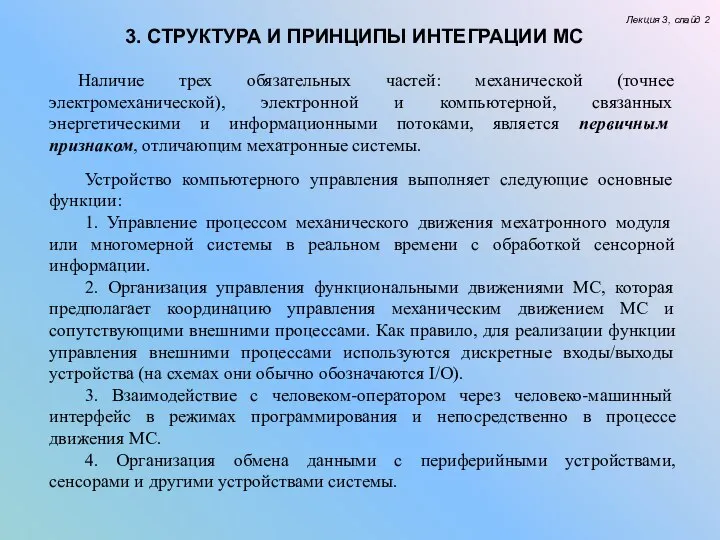
- 3. Лекция 3, слайд 2 3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС Устройство компьютерного управления выполняет следующие основные
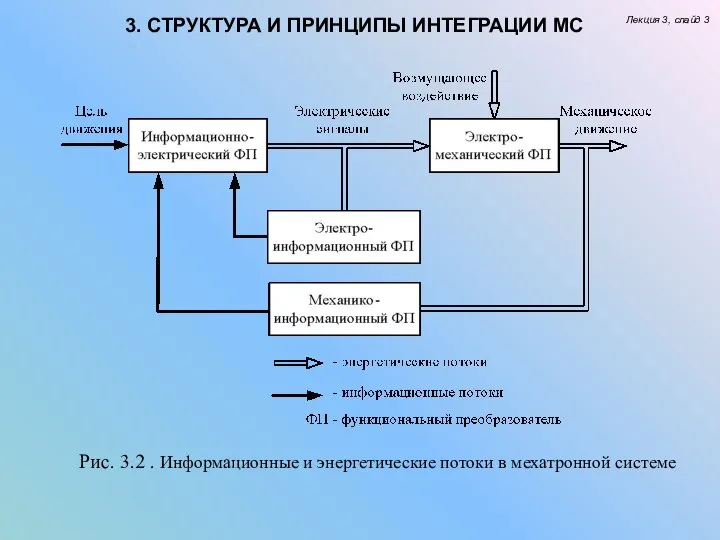
- 4. Лекция 3, слайд 3 Рис. 3.2 . Информационные и энергетические потоки в мехатронной системе 3. СТРУКТУРА
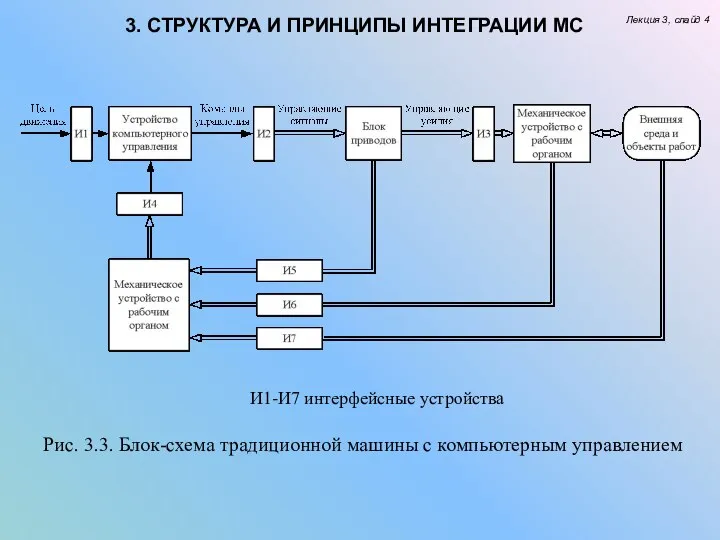
- 5. Лекция 3, слайд 4 Рис. 3.3. Блок-схема традиционной машины с компьютерным управлением 3. СТРУКТУРА И ПРИНЦИПЫ
- 6. Лекция 3, слайд 5 3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС Примеры межблоковых интерфейсов, которые наиболее часто
- 7. Лекция 3, слайд 6 3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС Интерфейс И3 - представляет собой, как
- 9. Скачать презентацию

3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Лекция 3, слайд 1
Рис. 3.1.
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Лекция 3, слайд 1
Рис. 3.1.
Лекция 3, слайд 2
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Устройство компьютерного
Лекция 3, слайд 2
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Устройство компьютерного
Лекция 3, слайд 3
Рис. 3.2 . Информационные и энергетические потоки
Лекция 3, слайд 3
Рис. 3.2 . Информационные и энергетические потоки
Лекция 3, слайд 4
Рис. 3.3. Блок-схема традиционной машины с компьютерным
Лекция 3, слайд 4
Рис. 3.3. Блок-схема традиционной машины с компьютерным
Лекция 3, слайд 5
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Примеры межблоковых
Лекция 3, слайд 5
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Примеры межблоковых
Лекция 3, слайд 6
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Интерфейс И3
Лекция 3, слайд 6
3. СТРУКТУРА И ПРИНЦИПЫ ИНТЕГРАЦИИ МС
Интерфейс И3
 Игровой ПК. Сборка до 90000 рублей. Магазин OLDI.RU
Игровой ПК. Сборка до 90000 рублей. Магазин OLDI.RU Теоретические концепции в области менеджмента организаций социально-культурной сферы
Теоретические концепции в области менеджмента организаций социально-культурной сферы Есептеуіш жүйенің даму тарихы
Есептеуіш жүйенің даму тарихы буква ъ - презентация для начальной школы_
буква ъ - презентация для начальной школы_ Нефрит - производитель одноразовой продукции для медицинских учреждений, салонов красоты, студий загара, SPA-салонов
Нефрит - производитель одноразовой продукции для медицинских учреждений, салонов красоты, студий загара, SPA-салонов UGC как инструмент удержания аудитории
UGC как инструмент удержания аудитории Класс ЗЕМНОВОДНЫЕ AMPHIBIA
Класс ЗЕМНОВОДНЫЕ AMPHIBIA Стажировка: фабрика звезд или деньги на ветер? Шатилова Евгения, руководитель проекта Rabota.ru Москва, 2011. - презентация
Стажировка: фабрика звезд или деньги на ветер? Шатилова Евгения, руководитель проекта Rabota.ru Москва, 2011. - презентация Дымковская игрушка
Дымковская игрушка Профессиональное самоопределение как средство социализации и адаптации учащихся в современных условиях
Профессиональное самоопределение как средство социализации и адаптации учащихся в современных условиях ЛС при заб орг дых
ЛС при заб орг дых Слоговые таблицы к урокам обучения грамоте
Слоговые таблицы к урокам обучения грамоте Неисправности посудомоечной машины: типы, причины и решение проблем
Неисправности посудомоечной машины: типы, причины и решение проблем «Волшебство в песочнице» Индивидуальные коррекционно-развивающие занятия с детьми среднего и старшего дошкольного возраста с
«Волшебство в песочнице» Индивидуальные коррекционно-развивающие занятия с детьми среднего и старшего дошкольного возраста с  Спортивные сооружения. Лекция 3. Классификация спортивных сооружений
Спортивные сооружения. Лекция 3. Классификация спортивных сооружений Автоматическое тестирование
Автоматическое тестирование ЧАО "Зуевский энергомеханический завод"
ЧАО "Зуевский энергомеханический завод" Дисциплина профессионального цикла для студентов, обучающихся по магистерским программам
Дисциплина профессионального цикла для студентов, обучающихся по магистерским программам  Собственное производство. Технология работы
Собственное производство. Технология работы Идеология индустриального общества
Идеология индустриального общества Презентация "Банковская система РФ и её совершенствование" - скачать презентации по Экономике
Презентация "Банковская система РФ и её совершенствование" - скачать презентации по Экономике Тема проекта «Безударные гласные в корне слова» Учитель начальных классов: Петрова О.А. г. Энгельс МОУ «СОШ №21»
Тема проекта «Безударные гласные в корне слова» Учитель начальных классов: Петрова О.А. г. Энгельс МОУ «СОШ №21» Презентация по экономике ученицы 11-А класса средней школы№14 Кубышиной Юлии Тема: Рыночная экономика.
Презентация по экономике ученицы 11-А класса средней школы№14 Кубышиной Юлии Тема: Рыночная экономика. Творческий проект на тему: «Вегетарианство» Выполнила ученица 9 «Б» класса МОУСОШ №17 Рахимова Регина
Творческий проект на тему: «Вегетарианство» Выполнила ученица 9 «Б» класса МОУСОШ №17 Рахимова Регина Презентация Послание президента РФ Дмитрия Медведева Федеральному собранию РФ
Презентация Послание президента РФ Дмитрия Медведева Федеральному собранию РФ Чем полезна гречка - презентация для начальной школы_
Чем полезна гречка - презентация для начальной школы_ Деревья
Деревья Управление риском
Управление риском