- Генетические алгоритмы

Содержание
- 2. Возникли ГА в результате попыток копирования естественных процессов, происходящих в мире живых организмов. Идею построения таких
- 3. Генети́ческий алгори́тм (англ. genetic algorithm) — это эвристический алгоритм поиска, применяемый для решения задач оптимизации и
- 4. В методологии ГА используется биологическая терминология в упрощенном виде Особь (индивидуум, от лат . individuum -
- 5. Локус – позиция, указывающая место размещения данного гена в хромосоме (цепочке). Функция приспособленности (fitness function) –
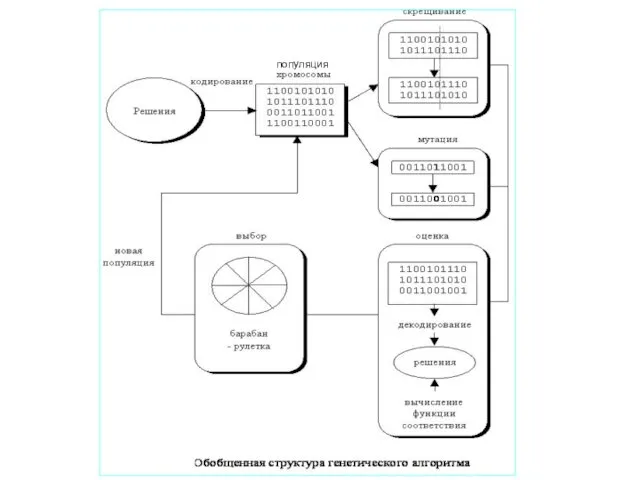
- 6. ЭТАПЫ ГЕНЕТИЧЕСКОГО АЛГОРИТМА Создание начальной популяции Вычисление функций приспособленности для особей популяции (оценивание) Начало цикла: Выбор
- 7. Модель «эволюционного процесса»
- 8. ПРИНЦИП РАБОТЫ ГА Задача кодируется таким образом, чтобы её решение могло быть представлено в виде вектора
- 9. Простой генетический алгоритм
- 10. Вектора переменных в ГА записываются в виде цепочек символов, используя, как правило, бинарное кодирование. Хромосома (особь)
- 11. Доля производимых на каждой итерации отпрысков называется коэффициентом скрещивания. Произведение коэффициента скрещивания на размер популяции показывает
- 12. СХЕМА ОПЕРАЦИИ СКРЕЩИВАНИЯ
- 13. популяция
- 14. Операция мутации. Мутация - это фоновая операция, производящая случайное изменение в различных хромосомах. Наипростейший вариант мутации
- 15. Случайный поиск является примером стратегии, которая, наоборот, исследует пространство решений, игнорируя исследование перспективных областей поискового пространства.
- 16. ПРЕИМУЩЕСТВА ГЕНЕТИЧЕСКИХ АЛГОРИТМОВ Существуют два главных преимущества генетических алгоритмов перед классическими оптимизационными методиками: 1. ГА не
- 17. Пример ГА: Решение Диофантова уравнения Рассмотрим диофантово (только целочисленные решения) уравнение: a+2b+3c+4d=30, где a, b, c
- 18. Таблица 2: Коэффициенты выживаемости первого поколения хромосом Так как меньшие значения ближе к 30, то они
- 19. Таблица 3: Вероятность оказаться родителем Для выбора 5-и пар родителей (каждая из которых будет иметь 1
- 20. Таблица 4: Симуляция выбора родителей Каждый потомок содержит информацию о генах и отца и от матери.
- 21. Таблица 6: Симуляция кросс-оверов хромосом родителей Таблица 7: Коэффициенты выживаемости потомков (fitness)
- 22. Средняя приспособленность (fitness) потомков оказалась 38.8, в то время как у родителей этот коэффициент равнялся 59.4.
- 23. ПРИМЕНЕНИЕ ГА Генетические алгоритмы применяются при разработке программного обеспечения, в системах искусственного интеллекта, оптимизации, искусственных нейронных
- 24. Использование генетических алгоритмов для автоматического формирования программ управления движением автономных реконфигурируемых мехатронно-модульных роботов Совершено самостоятельный аспект
- 25. PolyBot (PARK, Xerox, USA)
- 26. Многозвенные реконфигурируемые мехатронно-модульные роботы в зависимости от условий своего функционирования и специфики решаемых задач должны не
- 27. Формирование программы управления мехатронно-модульного робота в конфигурации шагающего устройства предполагает необходимость построения целесообразной последовательности циклических изменений
- 28. • Структура хромосомы, отвечающей этим требованиям, разбивается на несколько фрагментов, каждый из которых будет кодировать один
- 29. Следовательно, исходя из предположения, что движение робота при моделировании начинается в точке с нулевыми координатами, функция
- 30. Машинная реализация процесса эволюции особей, которые представляются в виде хромосом с выбранным способом структуризации, обусловливает необходимость
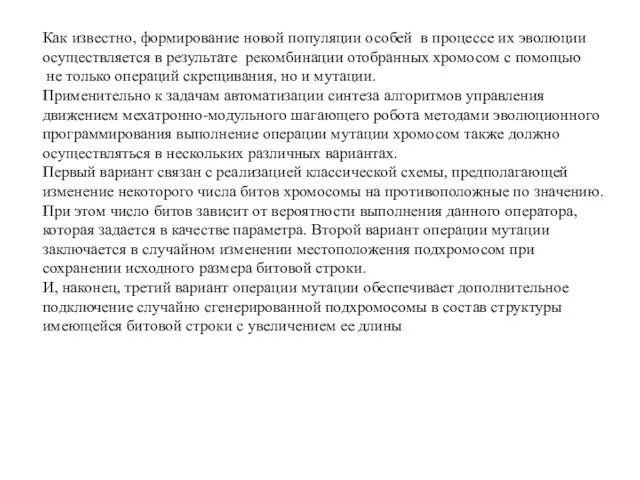
- 31. Как известно, формирование новой популяции особей в процессе их эволюции осуществляется в результате рекомбинации отобранных хромосом
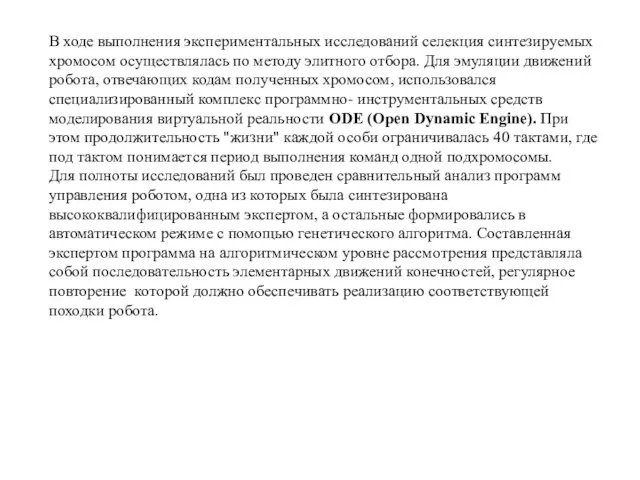
- 33. В ходе выполнения экспериментальных исследований селекция синтезируемых хромосом осуществлялась по методу элитного отбора. Для эмуляции движений
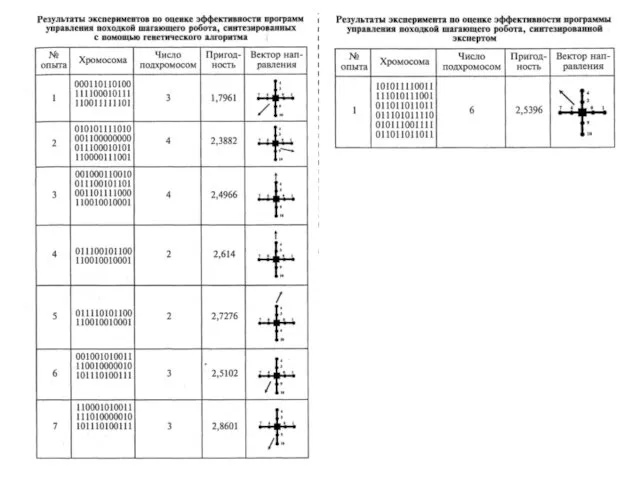
- 35. Анализ экспериментальных данных показывает, что в смысле полезности полученных хромосом автоматически формируемые с помощью генетического алгоритма
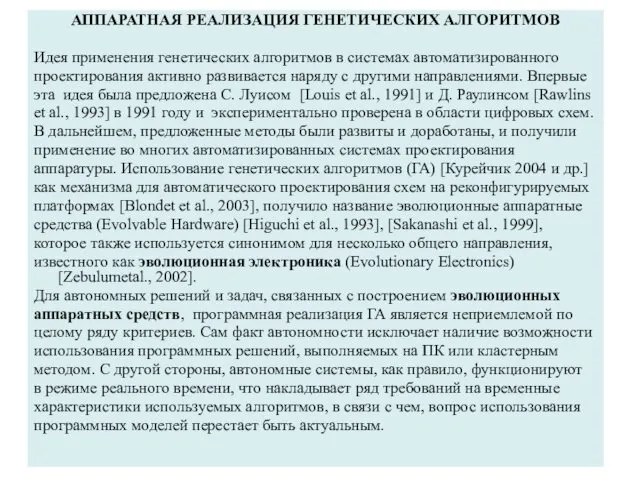
- 36. АППАРАТНАЯ РЕАЛИЗАЦИЯ ГЕНЕТИЧЕСКИХ АЛГОРИТМОВ Идея применения генетических алгоритмов в системах автоматизированного проектирования активно развивается наряду с
- 38. Скачать презентацию
Возникли ГА в результате попыток копирования естественных процессов, происходящих в мире
Возникли ГА в результате попыток копирования естественных процессов, происходящих в мире
Генети́ческий алгори́тм (англ. genetic algorithm) — это эвристический алгоритм поиска,
Генети́ческий алгори́тм (англ. genetic algorithm) — это эвристический алгоритм поиска,
В методологии ГА используется биологическая терминология
в упрощенном виде
Особь (индивидуум, от
В методологии ГА используется биологическая терминология
в упрощенном виде
Особь (индивидуум, от
Локус – позиция, указывающая место размещения данного гена в хромосоме (цепочке).
Функция
Локус – позиция, указывающая место размещения данного гена в хромосоме (цепочке).
Функция
ЭТАПЫ ГЕНЕТИЧЕСКОГО АЛГОРИТМА
Создание начальной популяции
Вычисление функций приспособленности для особей популяции (оценивание)
ЭТАПЫ ГЕНЕТИЧЕСКОГО АЛГОРИТМА
Создание начальной популяции
Вычисление функций приспособленности для особей популяции (оценивание)

Модель «эволюционного процесса»
Модель «эволюционного процесса»
ПРИНЦИП РАБОТЫ ГА
Задача кодируется таким образом, чтобы её решение могло быть
Задача кодируется таким образом, чтобы её решение могло быть
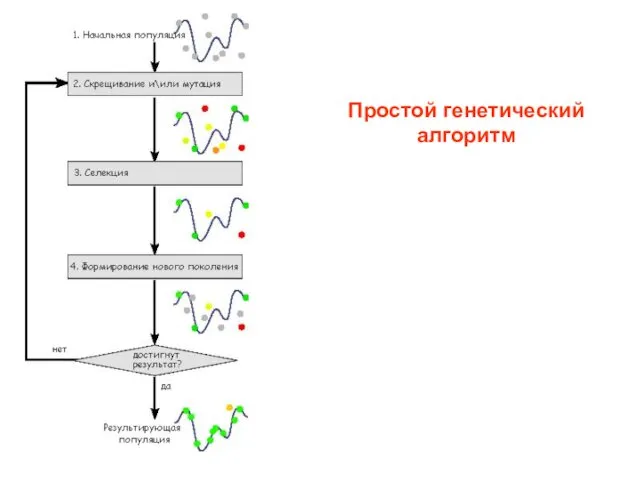
Простой генетический алгоритм
Простой генетический алгоритм
Вектора переменных в ГА записываются в виде цепочек символов, используя, как
Вектора переменных в ГА записываются в виде цепочек символов, используя, как
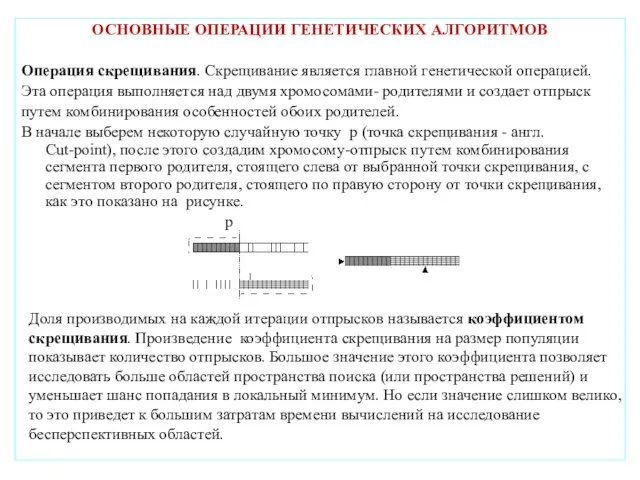
Доля производимых на каждой итерации отпрысков называется коэффициентом скрещивания. Произведение коэффициента
Доля производимых на каждой итерации отпрысков называется коэффициентом скрещивания. Произведение коэффициента
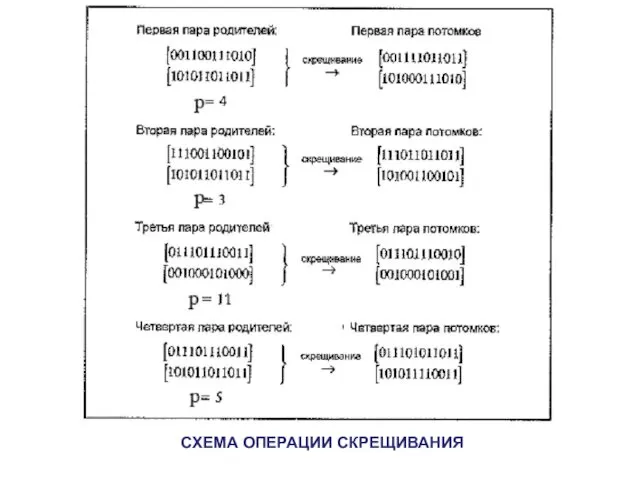
СХЕМА ОПЕРАЦИИ СКРЕЩИВАНИЯ
СХЕМА ОПЕРАЦИИ СКРЕЩИВАНИЯ
популяция
популяция
Операция мутации. Мутация - это фоновая операция, производящая
случайное изменение
Операция мутации. Мутация - это фоновая операция, производящая
случайное изменение
Случайный поиск является примером стратегии, которая, наоборот, исследует
пространство решений,
Случайный поиск является примером стратегии, которая, наоборот, исследует
пространство решений,
ПРЕИМУЩЕСТВА ГЕНЕТИЧЕСКИХ АЛГОРИТМОВ
Существуют два главных преимущества генетических алгоритмов перед
классическими оптимизационными
ПРЕИМУЩЕСТВА ГЕНЕТИЧЕСКИХ АЛГОРИТМОВ
Существуют два главных преимущества генетических алгоритмов перед
классическими оптимизационными
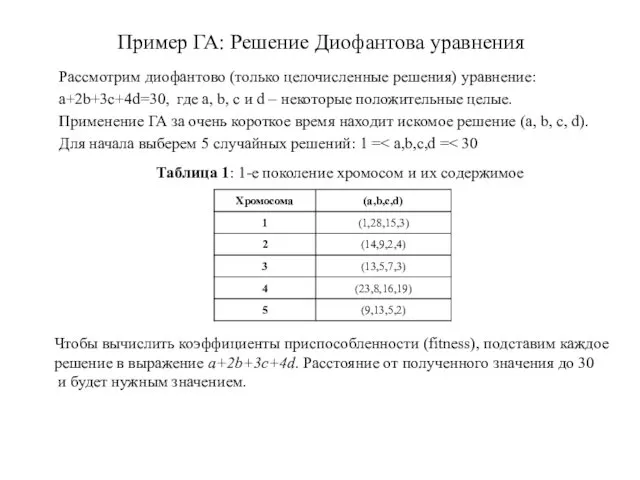
Пример ГА: Решение Диофантова уравнения
Рассмотрим диофантово (только целочисленные решения) уравнение:
a+2b+3c+4d=30,
Пример ГА: Решение Диофантова уравнения
Рассмотрим диофантово (только целочисленные решения) уравнение:
a+2b+3c+4d=30,
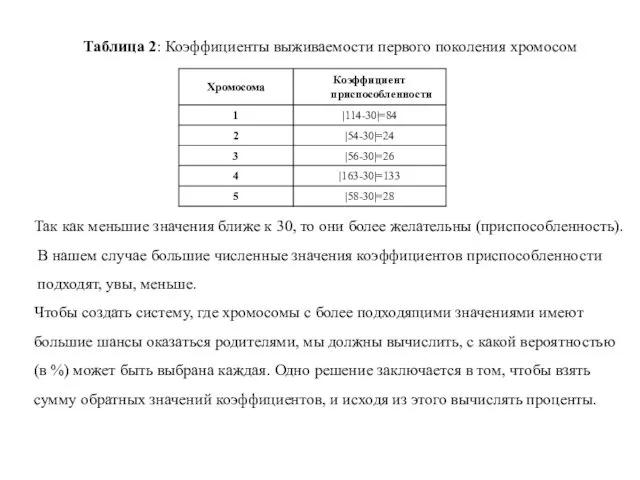
Таблица 2: Коэффициенты выживаемости первого поколения хромосом
Так как меньшие значения ближе
Таблица 2: Коэффициенты выживаемости первого поколения хромосом
Так как меньшие значения ближе
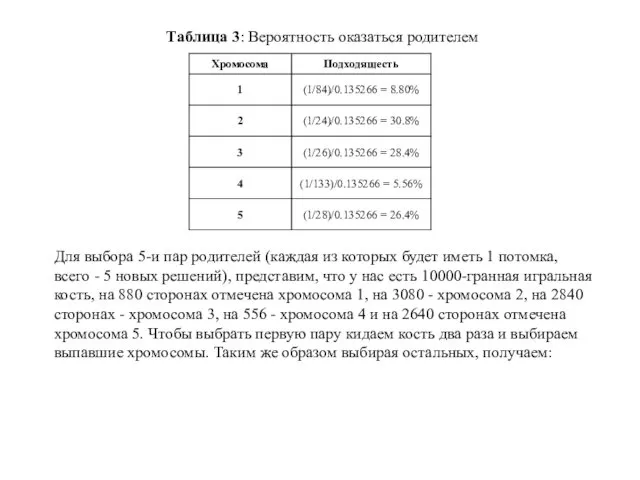
Таблица 3: Вероятность оказаться родителем
Для выбора 5-и пар родителей (каждая из которых
Таблица 3: Вероятность оказаться родителем
Для выбора 5-и пар родителей (каждая из которых
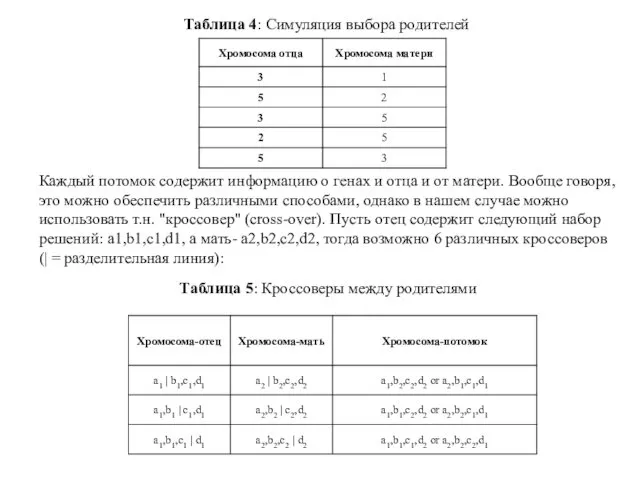
Таблица 4: Симуляция выбора родителей
Каждый потомок содержит информацию о генах и отца
Таблица 4: Симуляция выбора родителей
Каждый потомок содержит информацию о генах и отца
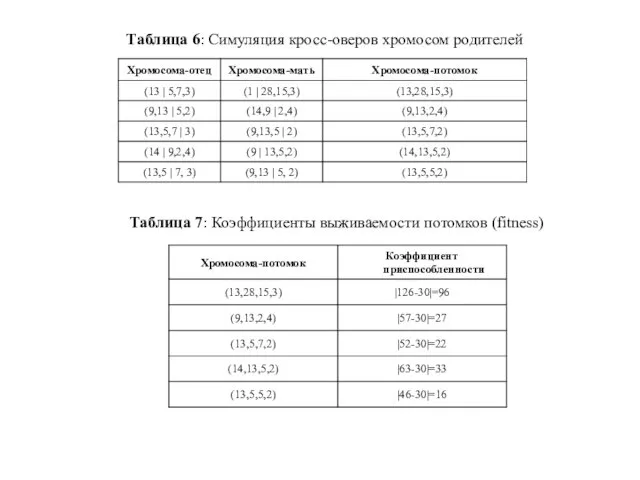
Таблица 6: Симуляция кросс-оверов хромосом родителей
Таблица 7: Коэффициенты выживаемости потомков (fitness)
Таблица 6: Симуляция кросс-оверов хромосом родителей
Таблица 7: Коэффициенты выживаемости потомков (fitness)
Средняя приспособленность (fitness) потомков оказалась 38.8, в то время как
Средняя приспособленность (fitness) потомков оказалась 38.8, в то время как
ПРИМЕНЕНИЕ ГА
Генетические алгоритмы применяются при разработке программного обеспечения, в системах искусственного
ПРИМЕНЕНИЕ ГА
Генетические алгоритмы применяются при разработке программного обеспечения, в системах искусственного
Использование генетических алгоритмов для автоматического формирования программ управления движением автономных реконфигурируемых
Использование генетических алгоритмов для автоматического формирования программ управления движением автономных реконфигурируемых
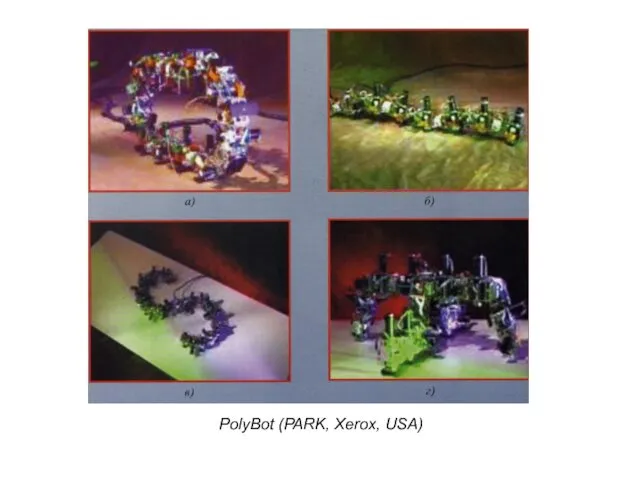
PolyBot (PARK, Xerox, USA)
PolyBot (PARK, Xerox, USA)
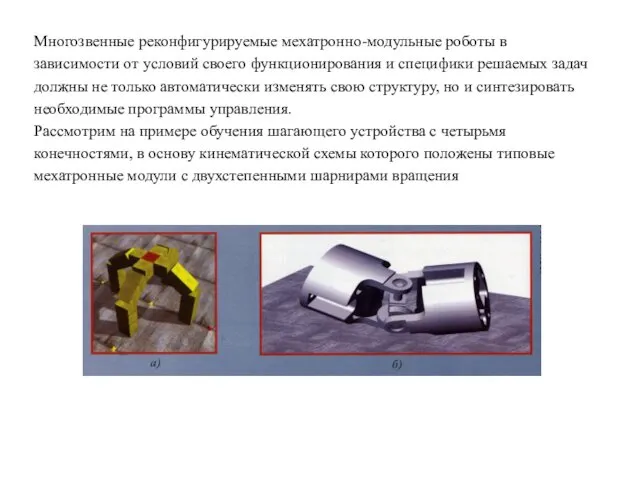
Многозвенные реконфигурируемые мехатронно-модульные роботы в
зависимости от условий своего функционирования и
Многозвенные реконфигурируемые мехатронно-модульные роботы в
зависимости от условий своего функционирования и
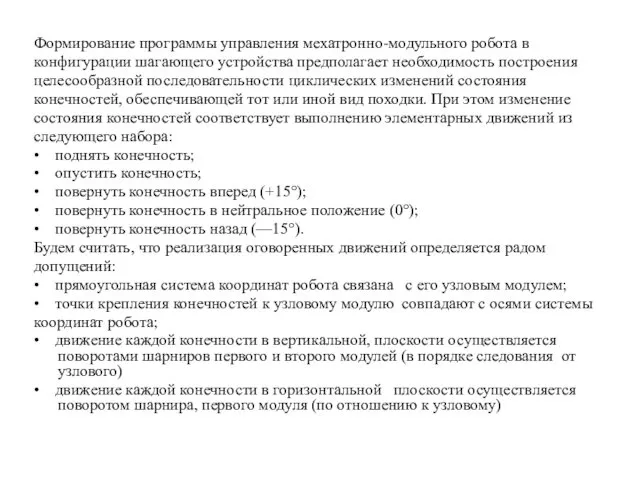
Формирование программы управления мехатронно-модульного робота в
конфигурации шагающего устройства предполагает необходимость
Формирование программы управления мехатронно-модульного робота в
конфигурации шагающего устройства предполагает необходимость
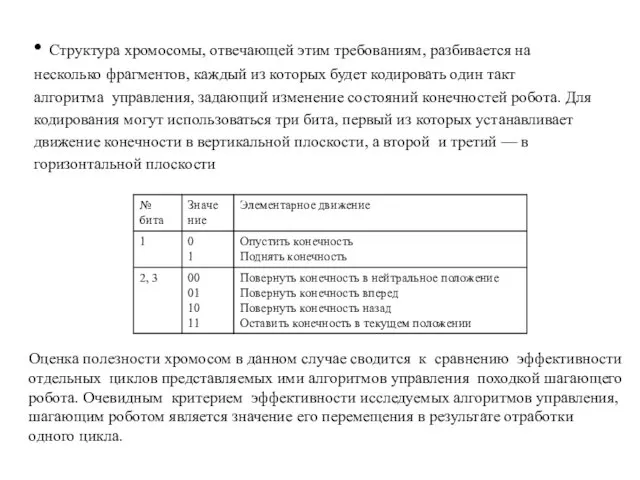
• Структура хромосомы, отвечающей этим требованиям, разбивается на
несколько фрагментов, каждый
• Структура хромосомы, отвечающей этим требованиям, разбивается на
несколько фрагментов, каждый
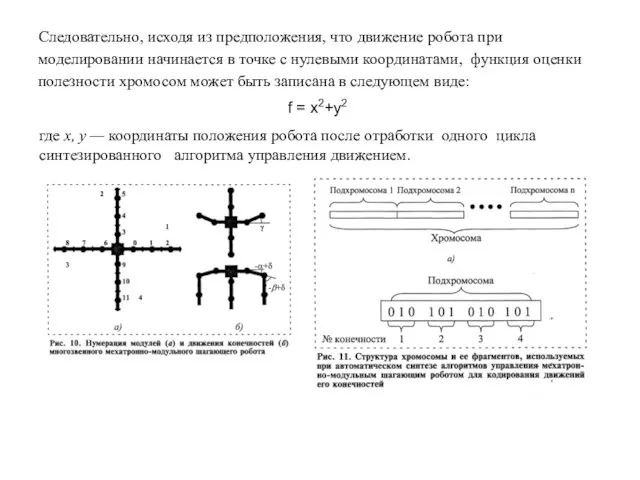
Следовательно, исходя из предположения, что движение робота при
моделировании начинается в
Следовательно, исходя из предположения, что движение робота при
моделировании начинается в
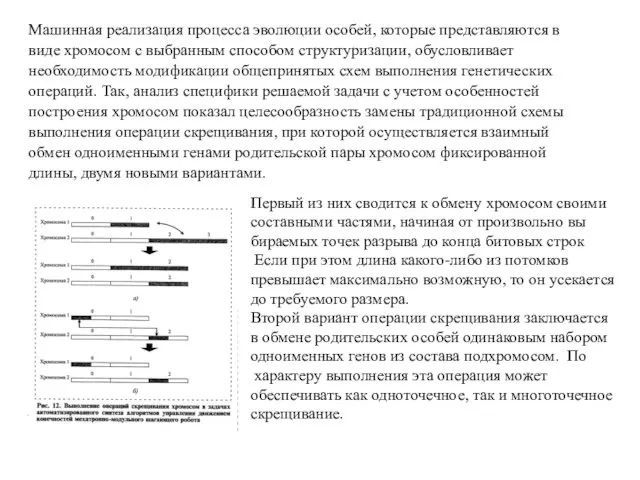
Машинная реализация процесса эволюции особей, которые представляются в
виде хромосом с
Машинная реализация процесса эволюции особей, которые представляются в
виде хромосом с
Как известно, формирование новой популяции особей в процессе их эволюции
осуществляется
Как известно, формирование новой популяции особей в процессе их эволюции
осуществляется

В ходе выполнения экспериментальных исследований селекция синтезируемых хромосом осуществлялась по методу
В ходе выполнения экспериментальных исследований селекция синтезируемых хромосом осуществлялась по методу
Анализ экспериментальных данных показывает, что в смысле полезности
полученных хромосом автоматически
Анализ экспериментальных данных показывает, что в смысле полезности
полученных хромосом автоматически
АППАРАТНАЯ РЕАЛИЗАЦИЯ ГЕНЕТИЧЕСКИХ АЛГОРИТМОВ
Идея применения генетических алгоритмов в системах автоматизированного
проектирования
АППАРАТНАЯ РЕАЛИЗАЦИЯ ГЕНЕТИЧЕСКИХ АЛГОРИТМОВ
Идея применения генетических алгоритмов в системах автоматизированного
проектирования
 Возрастные особенности
Возрастные особенности Нуклеозиды, нуклеотиды, нуклеиновые кислоты: функции и обмен
Нуклеозиды, нуклеотиды, нуклеиновые кислоты: функции и обмен Введение в вирусологию
Введение в вирусологию Йог Раманантата – Упражнения йоги для глаз Не секрет, что зрение людей становится все хуже и хуже. Если ваше зрение дорого вам, н
Йог Раманантата – Упражнения йоги для глаз Не секрет, что зрение людей становится все хуже и хуже. Если ваше зрение дорого вам, н Презентация на тему "Хрящевые рыбы" - скачать бесплатно презентации по Биологии_
Презентация на тему "Хрящевые рыбы" - скачать бесплатно презентации по Биологии_ Обмен веществ и превращение энергии
Обмен веществ и превращение энергии Пищеварение в ротовой полости
Пищеварение в ротовой полости Празитизм как экологическое явление
Празитизм как экологическое явление Семейство: Actinomycetaceae. Род: Актиномицеты
Семейство: Actinomycetaceae. Род: Актиномицеты Өтпелі тақырып Жомарт күз. Күз мезгілі, балабақша ауласындағы және жақын маңайдағы өсімдіктер туралы білімдерін кеңейту
Өтпелі тақырып Жомарт күз. Күз мезгілі, балабақша ауласындағы және жақын маңайдағы өсімдіктер туралы білімдерін кеңейту Тема: «Животные. Брачные обряды» (Внеклассное мероприятие по биологии)
Тема: «Животные. Брачные обряды» (Внеклассное мероприятие по биологии) ВВЕДЕНИЕ В ЗООЛОГИЮ
ВВЕДЕНИЕ В ЗООЛОГИЮ  Понятие об анализаторах. Органы чувств
Понятие об анализаторах. Органы чувств Микробиологические методы диагностики инфекционных поражений ЦНС. Острые гнойные менингиты, абсцессы мозга
Микробиологические методы диагностики инфекционных поражений ЦНС. Острые гнойные менингиты, абсцессы мозга Презентация Глобальная экологическая проблема.
Презентация Глобальная экологическая проблема.  Апоптоз. Роль апоптоза в многоклеточном организме
Апоптоз. Роль апоптоза в многоклеточном организме Microbiology. Sub groups of Microbes
Microbiology. Sub groups of Microbes Презентация на тему Дикорастущие и культурные растения
Презентация на тему Дикорастущие и культурные растения МОУ Усть – Бакчарская средняя общеобразовательная школа ЗАНЯТИЕ ПО БИОЛОГИИ ДЛЯ УЧАЩИХСЯ 10 КЛАССА. КОВАЛЁВА. ЮЛИЯ ДМИТРИЕВНА. У
МОУ Усть – Бакчарская средняя общеобразовательная школа ЗАНЯТИЕ ПО БИОЛОГИИ ДЛЯ УЧАЩИХСЯ 10 КЛАССА. КОВАЛЁВА. ЮЛИЯ ДМИТРИЕВНА. У Влияние экологических факторов на микроорганизмы
Влияние экологических факторов на микроорганизмы Презентация на тему "Как изменялись способы движения в ходе эволюции животного мира" - скачать презентации по Биологии
Презентация на тему "Как изменялись способы движения в ходе эволюции животного мира" - скачать презентации по Биологии Особенности строения и жизнедеятельности Ракообразных
Особенности строения и жизнедеятельности Ракообразных Функциональная анатомия головного мозга
Функциональная анатомия головного мозга Склад крові
Склад крові Биотические и антропогенные факторы
Биотические и антропогенные факторы Отдел голосеменные. Ель
Отдел голосеменные. Ель Пищеварительная система
Пищеварительная система Презентация на тему "Пищеварение в ротовой полости и желудке" - скачать бесплатно презентации по Биологии
Презентация на тему "Пищеварение в ротовой полости и желудке" - скачать бесплатно презентации по Биологии