- Формы движения твердого тела

Содержание
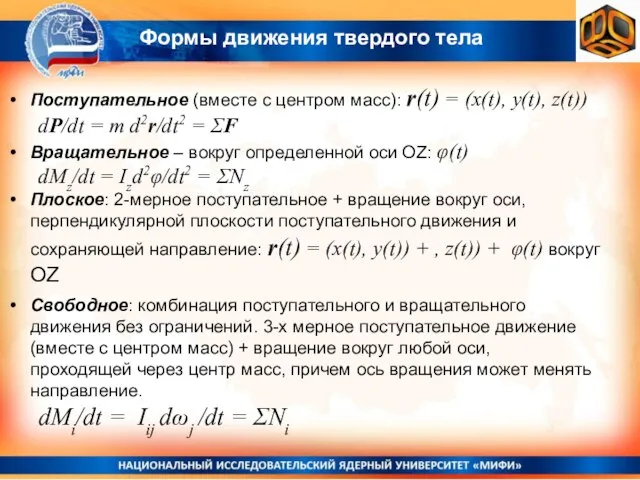
- 2. Формы движения твердого тела Поступательное (вместе с центром масс): r(t) = (x(t), y(t), z(t)) dP/dt =
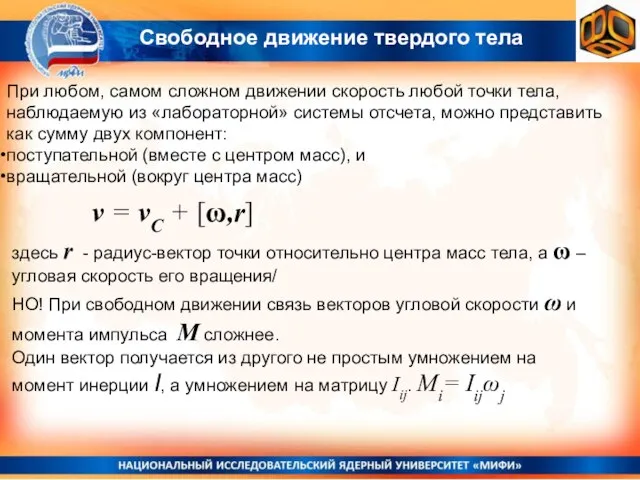
- 3. Свободное движение твердого тела При любом, самом сложном движении скорость любой точки тела, наблюдаемую из «лабораторной»
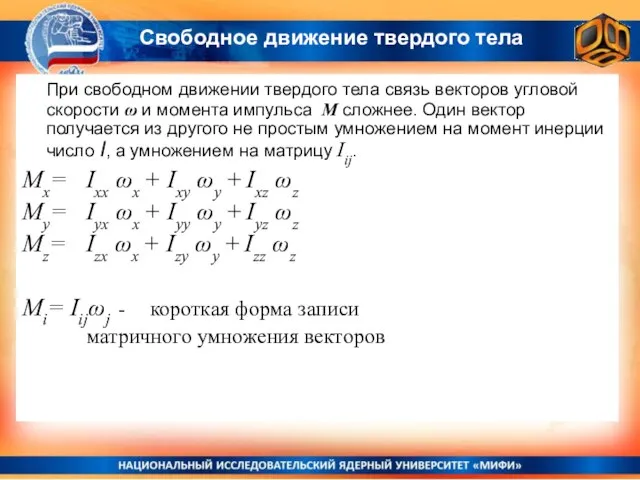
- 4. При свободном движении твердого тела связь векторов угловой скорости ω и момента импульса M сложнее. Один
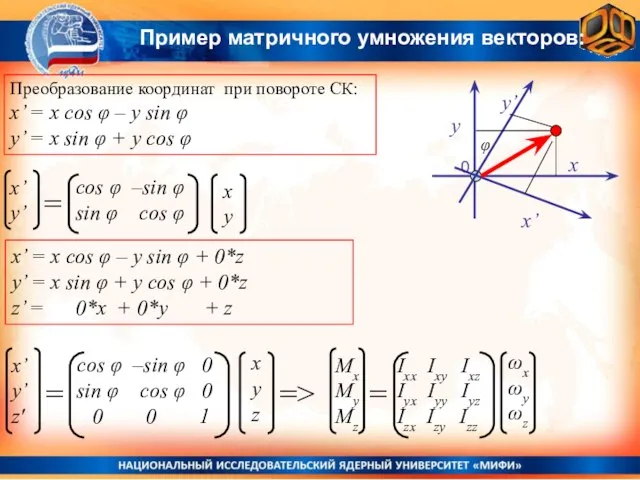
- 5. y 0 Преобразование координат при повороте СК: x’ = x cos φ – y sin φ
- 6. Mx= Ixх ωx + Ixy ωy + Ixz ωz My= Iyх ωx + Iyy ωy +
- 7. Если тело имеет оси симметрии, и если направить оси координат x, y, z вдоль осей симметрии,
- 8. Свободное движение твердого тела Свободно движущееся тело всегда вращается вокруг коси, проходящей через центр масс тела
- 9. Движение с произвольной осью вращения ^ СРОЧНО ВСЕ Смотрите «ФИЗИКУ в ОПЫТАХ» на openedu.ru! Это необходимо
- 10. ГИРОСКОПЫ
- 11. Гироскопический эффект Гироскопический эффект Под действием силы F , приложенной к оси гироскопа в направлении линии
- 12. Прецессия гироскопа Прецессия гироскопа – вращение оси гироскопа под действием приложенных к оси внешних сил (силы
- 14. Скачать презентацию
Формы движения твердого тела
Поступательное (вместе с центром масс): r(t) = (x(t),
Формы движения твердого тела
Поступательное (вместе с центром масс): r(t) = (x(t),
Свободное движение твердого тела
При любом, самом сложном движении скорость любой точки
Свободное движение твердого тела
При любом, самом сложном движении скорость любой точки
При свободном движении твердого тела связь векторов угловой скорости ω
При свободном движении твердого тела связь векторов угловой скорости ω
y
0
Преобразование координат при повороте СК:
x’ = x cos φ –
y
0
Преобразование координат при повороте СК:
x’ = x cos φ –
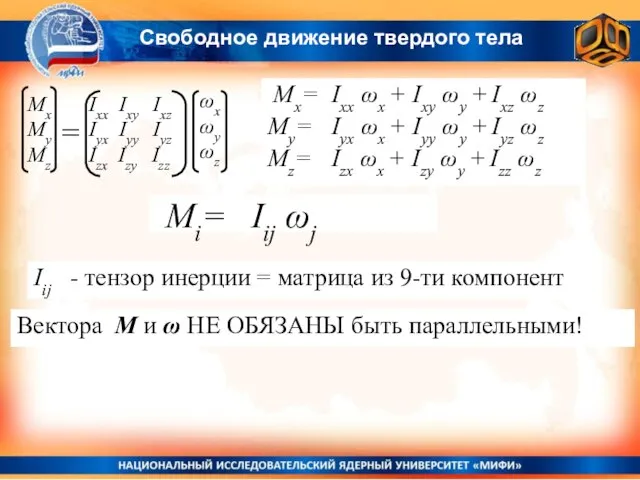
Mx= Ixх ωx + Ixy ωy + Ixz ωz
My=
Mx= Ixх ωx + Ixy ωy + Ixz ωz
My=
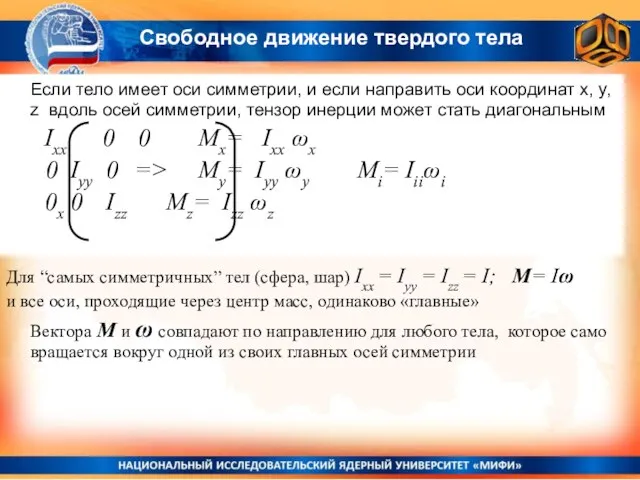
Если тело имеет оси симметрии, и если направить оси координат
Если тело имеет оси симметрии, и если направить оси координат
Свободное движение твердого тела
Свободно движущееся тело всегда вращается вокруг коси, проходящей
Свободное движение твердого тела
Свободно движущееся тело всегда вращается вокруг коси, проходящей
Движение с произвольной осью вращения
^
СРОЧНО ВСЕ Смотрите «ФИЗИКУ в ОПЫТАХ» на
Движение с произвольной осью вращения
^
СРОЧНО ВСЕ Смотрите «ФИЗИКУ в ОПЫТАХ» на
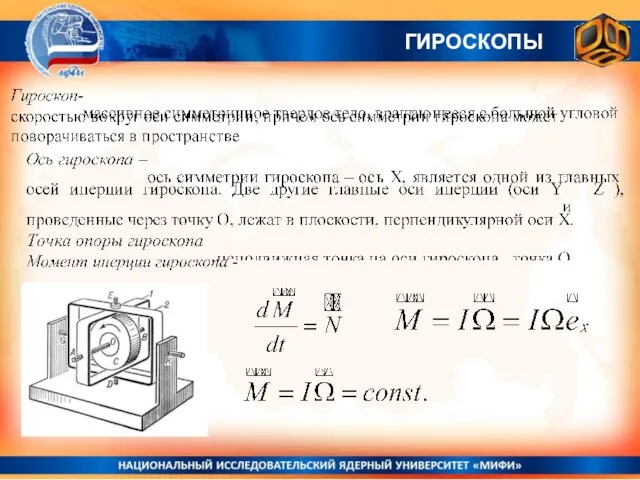
ГИРОСКОПЫ
ГИРОСКОПЫ
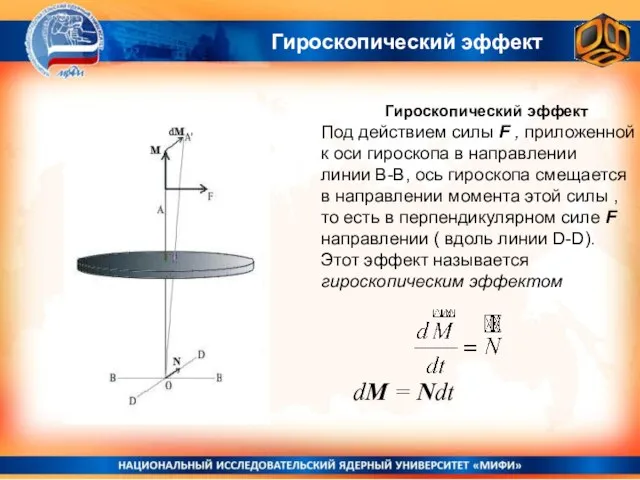
Гироскопический эффект
Гироскопический эффект
Под действием силы F , приложенной
к оси гироскопа
Гироскопический эффект
Гироскопический эффект
Под действием силы F , приложенной
к оси гироскопа
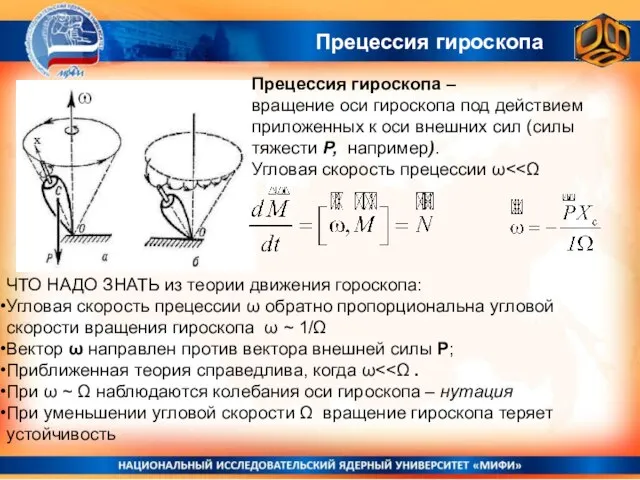
Прецессия гироскопа
Прецессия гироскопа –
вращение оси гироскопа под действием
приложенных к
Прецессия гироскопа
Прецессия гироскопа –
вращение оси гироскопа под действием
приложенных к
 Распределение газовых молекул по скоростям и энергиям (Тема 2)
Распределение газовых молекул по скоростям и энергиям (Тема 2) Первое начало термодинамики
Первое начало термодинамики Оптика. Лазеры
Оптика. Лазеры Диагностика ходовой части и рулевого управления
Диагностика ходовой части и рулевого управления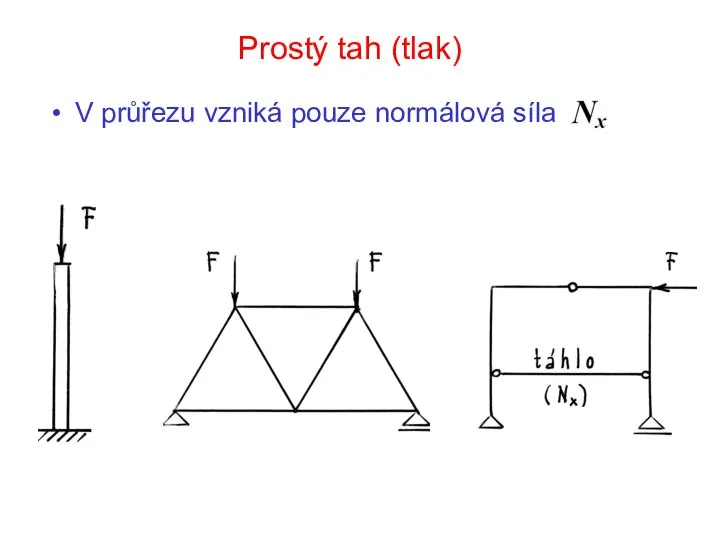 Prostý tah (tlak)
Prostý tah (tlak) Гамма-излучение
Гамма-излучение Презентация по физике "Преломление света" - скачать бесплатно
Презентация по физике "Преломление света" - скачать бесплатно Матроиды структуры токов и напряжений
Матроиды структуры токов и напряжений Конструкциялық материалдардың беріктік және созымдылық физикасы
Конструкциялық материалдардың беріктік және созымдылық физикасы Представление аналогового сигнала в дискретной форме
Представление аналогового сигнала в дискретной форме Подготовил ученик 8 «А» класса МОУ СОШ № 7 г.о.Новокуйбышевска Самарская область Шлыков Влад. «Исследование электромагнитного из
Подготовил ученик 8 «А» класса МОУ СОШ № 7 г.о.Новокуйбышевска Самарская область Шлыков Влад. «Исследование электромагнитного из Теоретическая (техническая) механика. Статика
Теоретическая (техническая) механика. Статика Что изучает физика. Физические термины
Что изучает физика. Физические термины Система кондиционирования воздуха
Система кондиционирования воздуха Оптические приборы
Оптические приборы История паровых машин
История паровых машин Настройка автомодели для дрифтинга
Настройка автомодели для дрифтинга Атомные электростанции
Атомные электростанции Плоская система произвольно расположенных сил. Статика
Плоская система произвольно расположенных сил. Статика Урок физики в 7 классе Коваленко МГ
Урок физики в 7 классе Коваленко МГ Влияние радиоактивных излучений на живые организмы
Влияние радиоактивных излучений на живые организмы Импульс тела. Закон сохранения импульса. Причины введения импульса
Импульс тела. Закон сохранения импульса. Причины введения импульса Магнитооптика ферромагнетиков
Магнитооптика ферромагнетиков Основные постулаты квантовой теории
Основные постулаты квантовой теории Міцносні характеристики ґрунту. Умова міцності в точці ґрунтового масиву. (Лекція 7)
Міцносні характеристики ґрунту. Умова міцності в точці ґрунтового масиву. (Лекція 7) Спектры . спектральный анализ. Спектральные аппараты
Спектры . спектральный анализ. Спектральные аппараты Выпускная квалификационная работа: Система термостатирования тканей человека
Выпускная квалификационная работа: Система термостатирования тканей человека Измерение объема тела
Измерение объема тела